Заявляемое техническое решение относится к технике, а именно к способам и устройствам, позволяющим определять угол наклона объектов в диапазоне от 0 до 180°, в одной или двух плоскостях, в дискретном или в непрерывном режиме. Это дает возможность использовать его при создании датчиков и различных систем, применяемых в робототехнике, в охранной сигнализации, в контрольно-измерительном оборудовании, в средствах автоматизации обеспечения безопасности на транспорте, в машиностроении, металлургии, в других областях деятельности человека, где необходимо определять предельный или реальный угол наклона объекта.
Известно техническое решение, в котором способ определения угла наклона и устройство для его осуществления основаны на использовании электролита, который при наклоне на заданный угол замыкает встроенные в емкость с жидкостью электроды, связанные с электрической схемой. Данное техническое решение предполагает наличие двух электролитических уровня, выполненных каждый в виде ампулы цилиндрической формы с двумя электродами, установленными симметрично относительно третьего - среднего, расположенного на противоположной части ампулы. Оба эти уровня повернуты относительно своих продольных осей на 180° и наклонены к горизонту на заданный угол в противоположных направлениях. Электролитические уровни образуют два плеча измерительного моста, в первую диагональ которого включен источник питающего напряжения, а во вторую - нагрузка. Две пары электродов электролитических уровней соединены между собой и подключены к цепи источника питающего напряжения (патент РФ на изобретение №2330241, МПК G01C 9/18, приоритет от 01.02.2007).
Известен способ определения угла наклона и датчик угла наклона, в котором применяется магнитная жидкость, помещенная в U-образный трубчатый гидроуровень, на одном из концов которого выполнена обмотка, связанная с электрической схемой. При наклоне U-образного трубчатого гидроуровня магнитная жидкость попадает в зону обмотки, изменяя тем самым ее электрические характеристики (патент РФ на изобретение №2397443, МПК G01C 9/22, G01F 23/18, приоритет от 03.04 2009).
Известно техническое решение, в котором датчик угла наклона содержит полый герметизированный корпус, частично заполненный жидким металлом, например ртутью, постоянно контактирующий с жидким металлом центральный электрод, закрепленный на дне корпуса, и дополнительные электроды, равномерно установленные вокруг центрального электрода (авторское свидетельство на изобретение №919527, МПК G01B 7/30, Н01Н 29/02, приоритет 22.05.1980).
Недостатками вышеперечисленных известных технических решений являются недостатки, обусловленные химико-физическими свойствами жидкостей и жидких металлов, а именно: низкая точность, из-за разницы температурных коэффициентов объемного расширения; малый диапазон рабочих температур; узкий диапазон измерения углов наклона; сложная для решения данной задачи конструкция, трудоемкая и дорогостоящая в изготовлении; ограничения на применение устройств с содержанием жидких металлов, в частности ртути.
Известно техническое решение, в котором использован принцип маятника, где тело маятника выполнено из токопроводящего материала, который при наклоне замыкает цепь на жестко закрепленные контакты, при этом пластина-маятник, укрепленная на корундовых опорах на магнитоэлектрическом демпфере с силовой коррекцией, боковых пластин и электронного балансного смесителя. Боковые пластины механически жестко связаны с корпусом и в строго вертикальном положении корпуса равноудалены от центральной пластины и расположены в позициях, соответствующих углу отклонения центральной пластины на 2,5°. При наклоне на данный угол в одну или другую стороны, пластина-маятник соединяется с боковой пластиной, замыкая при этом электрическую цепь (патент РФ №2344369, МПК G01B 7/30, G01C 9/00, приоритет от 09.10.2006 г.).
Недостатками известного технического решения является:
- контроль наклона только в одной плоскости;
- узкий диапазон измерения углов наклона - 2,5°;
- углы наклона определяются дискретно, нет возможности обеспечить непрерывность измерения;
- низкая надежность устройства из-за наличия контактной пары, работающей в условиях малого контактного давления;
- сложная, дорогостоящая в изготовлении конструкция.
Наиболее близким по принципу действия к заявляемому техническому решению является техническое решение, основанное на измерении величины перемещений шара, вызванных наклонами датчика относительно горизонта по двум координатам, емкостными преобразователями, и реализованный в двухкоординатном датчике угла наклона (патент РФ 2191988, МПК G01C 9/10, приоритет от 12.07.2000 г.). Датчик содержит электропроводящий шар, размещенный в герметичном корпусе, залитом диэлектрической жидкостью, в который введены две пары электропроводящих обкладок и электропроводящий осесимметричный подпятник, имеющий вогнутую сферическую поверхность, радиус которой больше радиуса шара, который и установлен на этот подпятник, при этом шар с подпятником образуют физический маятник и шар охватывают две пары электропроводящих обкладок, плоскости симметрии которых взаимно ортогональны и проходят через ось симметрии подпятника, на которой также лежит центр вогнутой сферической поверхности обкладок.
Датчик обеспечивает непрерывное измерение угла наклона в диапазоне от 0 до 30°.
Недостатками известного технического решения являются:
- узкий диапазон измерения углов наклона - от 0 до 30°, обусловленный радиальным расположением обкладок, находящихся в плоскости качения шара и ограничивающий его ход;
- нестабильная работа и высокая вероятность ложных показаний при работе в условиях вибрации. Известный способ для сглаживания вибрации предполагает использовать демпфирующую жидкость, однако малые зазоры между шаром и обкладками не позволяют достичь стабильности;
- сложность реализации данного способа в реальном устройстве, связанная с обеспечением высокой геометрической точности поверхностей подпятника с вогнутой сферической поверхностью, поверхностями обкладок, шара и обеспечением необходимого зазора между ними, и, как следствие, высокая стоимость изготовления.
Ставилась задача разработать универсальный, надежный, но в то же время простой и доступный для реализации способ измерения угла наклона, а на его основе устройства, обеспечивающие контроль наклона объектов для различных областей применений, в том числе для работы в жестких условиях эксплуатации.
Поставленная задача решается тем, что в способе определения угла наклона, включающем использование корпуса с крышкой, камеры, поверхности качения и тела качения, задание траектории движения тела качения под действием силы тяжести по поверхности качения при наклоне корпуса, создание чувствительной зоны, использование активного элемента, получение выходного сигнала, который зависит от степени наклона корпуса поверхность качения совмещают с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, активный элемент располагают вне камеры ниже поверхности качения, причем так, чтобы обеспечить возможность регулировки расстояния между ним и поверхностью качения, чувствительную зону создают таким образом, чтобы тело качения в своем исходном положении и верхняя поверхность активного элемента находились в ней, а изменяющийся выходной сигнал получают зависящим от расстояния между телом качения и активным элементом. При этом чувствительную зону создают с помощью либо электрического поля, либо постоянного магнитного поля, либо изменяющегося магнитного поля. В качестве поверхности качения используют либо конус, либо сферу, либо поверхность с заданной кривой, в качестве тела качения используют либо шар, либо цилиндр, либо диск. Для обеспечения стабильности работы при вибрации применяют демпфирующую жидкость, которую помещают в камеру с телом качения.
Создание чувствительной зоны с помощью электрического поля осуществляют активным элементом, состоящим из металлических обкладок, обладающих электрической емкостью, которые располагают концентрически под поверхностью качения, при этом выходной сигнал получают в результате изменения величины емкости во время движения тела качения по поверхности качения, относительно исходного положения. В этом случае тело качения выполняют либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, либо из диэлектрика или неметалла, у последних с коэффициентом диэлектрической проницаемости большим, чем коэффициент диэлектрической проницаемости материала поверхности качения, а корпус и поверхность качения выполняют из диэлектрического материала или неметалла.
Создание чувствительной зоны с помощью изменяющегося магнитного поля осуществляют активным элементом, состоящим из катушки индуктивности, при этом выходной сигнал получают в результате изменения величины индуктивности при движении тела качения по поверхности качения относительно исходного положения. В этом случае тело качения выполняют либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, а корпус и поверхность качения выполняют либо из диэлектрического материала, либо из неметалла.
Создание чувствительной зоны с помощью постоянного магнитного поля осуществляют телом качения, являющимся постоянным магнитом, а активный элемент выполняют состоящим либо из геркона, либо датчика Холла, выходной сигнал получают в результате изменения силы постоянного магнитного поля при движении тела качения по поверхности качения относительно исходного положения. В этом случае корпус и поверхность качения выполняют из немагнитного материала.
В устройстве для определения угла наклона, включающем корпус с крышкой, камеру, поверхность качения, тело качения, активный элемент, содержащий имеющие между собой электрическую емкость обкладки, которые выполнены создающими чувствительную зону и выходной сигнал, поверхность качения совмещена с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, обкладки расположены концентрически, а сам активный элемент расположен под поверхностью качения, причем обеспечивается возможность регулировки расстояния между ним и поверхностью качения, при этом тело качения на поверхности качения в своем исходном положении находится в области чувствительной зоны, а расстояние между телом качения и активным элементом определяет величину выходного сигнала. При этом корпус выполнен либо из неметалла, либо из диэлектрика, тело качения выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска, а также выполнено либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, либо из диэлектрика или неметалла, у последних с коэффициентом диэлектрической проницаемости большим, чем коэффициент диэлектрической проницаемости материала поверхности качения, поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой, а для обеспечения стабильности работы при вибрации в камеру с телом качения помещена демпфирующая жидкость.
В устройстве для определения угла наклона, включающем корпус с крышкой, камеру, поверхность качения, тело качения, активный элемент, поверхность качения совмещена с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, активный элемент выполнен в виде катушки индуктивности, создающей чувствительную зону и изменяющийся выходной сигнал, расположен под поверхностью качения, причем обеспечивается возможность регулировки расстояния между ним и поверхностью качения, при этом тело качения на поверхности качения в своем исходном положении находится в области чувствительной зоны, создаваемой переменным магнитным полем, образованным катушкой индуктивности, а расстояние между телом качения и активным элементом определяет величину выходного сигнала. При этом корпус выполнен либо из неметалла, либо из диэлектрика, тело качения выполнено в виде либо шара, либо цилиндра, либо диска, а также выполнено либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой, а для обеспечения стабильности работы при вибрации в камеру с телом качения помещена демпфирующая жидкость.
В устройстве для определения угла наклона, включающем корпус с крышкой, камеру, поверхность качения, тело качения, активный элемент, корпус выполнен из немагнитного материала, поверхность качения совмещена с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, тело качения представляет собой постоянный магнит, который создает чувствительную зону, а активный элемент выполнен создающим выходной сигнал и представляет собой либо герметичный магнитоуправляемый контакт, либо датчика Холла, расположен под поверхностью качения, причем обеспечивается возможность регулировки расстояния между ним и поверхностью качения, а расстояние между телом качения и активным элементом определяет значение выходного сигнала. При этом тело качения выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска, а также выполнено из намагниченного ферромагнетика, поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой, а для обеспечения стабильности работы при вибрации в камеру с телом качения помещена демпфирующая жидкость.
Технический эффект заявляемого технического решения заключается в расширении функциональных возможностей, упрощении конструкции, уменьшении стоимости, так как предлагаемый способ построен на использовании элементарной кинематической схемы, без сложных механических и электрических составляющих, не требующий для реализации дорогостоящих технологий и материалов. В связи с этим устройства, реализованные на данном способе, позволяют повысить надежность в эксплуатации, обеспечить универсальность и простоту в применении, и при этом достичь технологичности в изготовлении, обеспечить низкую стоимость и легкую интеграцию в существующие системы автоматизации технологических процессов.
Заявляемое техническое решение позволяет создавать устройства с малым весом, с небольшими габаритными размерами, а при необходимости миниатюрные, со стабильными выходными характеристиками, не требующие в процессе эксплуатации дополнительных настроек, регулировок. Это дает возможность помещать их в различного рода защитные оболочки, корпуса, кожуха и герметизировать компаундами, получая изделия с повышенной степенью защиты, до IР68 по ГОСТ 14254-96 и выше, вандалоустойчивые, с высокими эксплуатационными характеристиками, предназначенными для работы в жестких условиях эксплуатации:
- в условиях повышенного давления;
- при наличии вибрации;
- в сложных климатических условиях;
- в агрессивных средах;
- в условиях повышенных и пониженных температур;
- в условиях сильных абразивных и механических воздействий.
Заявляемое техническое решение поясняется чертежами.
На фигуре 1 представлена блок-схема поясняющая осуществление способа, где 1 - корпус, 2 - камера, 3 - поверхность качения, 4 - тело качения, 5 - активный элемент, 6 - чувствительная зона, 7 - крышка корпуса, 8 - демпфирующая жидкость.
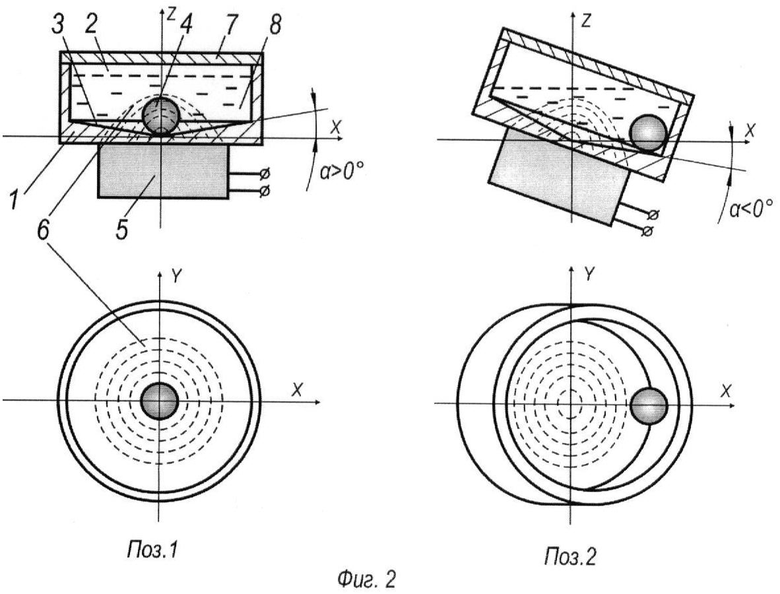
На фигуре 2 представлена блок-схема устройства для определения угла наклона, где: 1 - корпус, 2 - камера, 3 - поверхность качения, 4 - тело качения, 5 - активный элемент, 6 - чувствительная зона, 7 - крышка корпуса, 8 - демпфирующая жидкость.
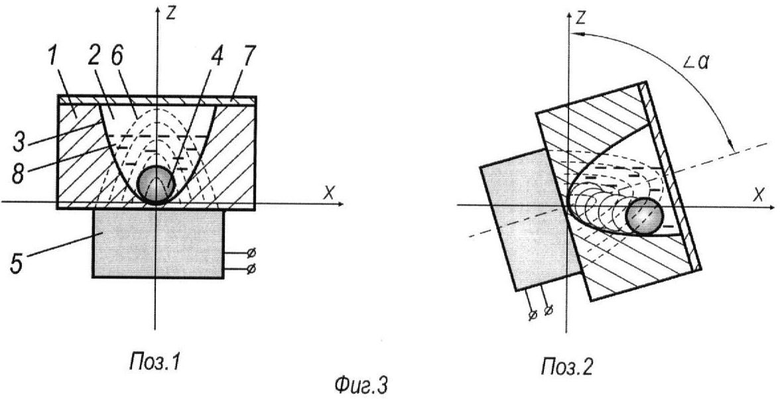
На фигуре 3 представлена блок-схема устройства для определения угла наклона где: 1 - корпус, 2 - камера, 3 - поверхность качения, 4 - тело качения, 5 - активный элемент, 6 - чувствительная зона, 7 - крышка корпуса, 8 - демпфирующая жидкость.
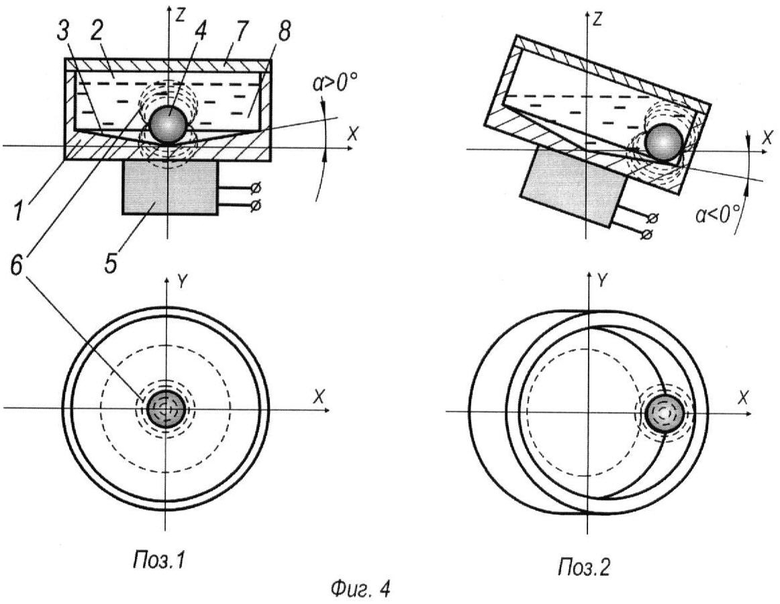
На фигуре 4 представлена блок-схема устройства для определения угла наклона где: 1 - корпус, 2 - камера, 3 - поверхность качения, 4 - тело качения, 5 - активный элемент, 6 - чувствительная зона, 7 - крышка корпуса, 8 - демпфирующая жидкость.
Заявляемый способ определения угла наклона поясняется блок-схемой, представленной на фигуре 1. Для осуществления способа используют корпус 1 с крышкой 7, камеру 2, поверхность качения 3 и тело качения 4. При этом поверхность качения 3 совмещают с внутренней поверхностью корпуса 1, создавая при этом камеру 2 в теле корпуса 1. На поверхность качения 3 помещают тело качения 4, которое под действием его собственной силы тяжести располагают в самой нижней точке - в исходном положении. Ниже поверхности качения устанавливают активный элемент 5, создающий изменяющийся выходной сигнал. Активный элемент выполняют с возможностью регулировки расстояния от него до поверхности качения 3, и устанавливают таким образом, чтобы обеспечить присутствие его верхней поверхности и тела качения 4 в своем исходном положении в чувствительной зоне 6. Чувствительная зона 6 может быть создана активным элементом 5, как показано на фиг.1, а также телом качения 4, как показано на фиг.3. При наклоне корпуса 1 с активным элементом 5 тело качения 4 под действием силы тяжести начинает двигаться, удаляясь от активного элемента 5, что приводит к изменению величины выходного сигнала создаваемого активным элементом 5, обеспечивая контроль наклона.
Предлагаемое расположение активного элемента 5 и чувствительной зоны 6 снимает ограничение движению тела качения 4 по поверхности качения 3, что при использовании различных форм камеры 2 и поверхности качения 3 позволяет увеличить величину контролируемого угла наклона до 180°.
В зависимости от способа создания чувствительной зоны активный элемент 5, входящий в заявленное техническое решение, может состоять из:
1) металлических обкладок, расположенных концентрически и образующих электрическую емкость между собой;
2) катушки индуктивности;
3) постоянного магнита.
В качестве тела качения используют шар, или диск, или цилиндр, а поверхность качения выполняют в виде сферы, конуса или поверхности с заданной кривой.
Изменяя принцип создания чувствительной зоны, вид поверхности качения и форму тела качения, заявляемое техническое решение позволяет создавать широкий спектр устройств для определения угла наклона, отличающихся характеристиками и сферой применения.
На фигуре 2, поз.1 представлено устройство для определения угла наклона дискретно, где активный элемент 5, создающий чувствительную зону 6 и изменяющийся выходной сигнал, состоит из металлических обкладок, обладающих электрической емкостью. В корпус 1, имеющий камеру 2 с поверхностью качения 3, которое может быть выполнено в виде конуса, помещено тело качения 4, которое под действием его собственной силы тяжести расположено в самой нижней точке - в исходном положении. Угол α, образованный плоскостью горизонта и плоскостью качения, является предельным, он задан для каждого устройства индивидуально в зависимости от желаемой величины контролируемого угла наклона и может находиться в диапазоне от 0 до 180°. Ниже поверхности качения установлен активный элемент 5, создающий изменяющийся выходной сигнал, он состоит из металлических обкладок, обладающих электрической емкостью, электрическое поле которых образует чувствительную зону 6. Расстояние между активным элементом 5 и поверхностью качения 3 отрегулировано таким образом, что обеспечивает присутствие тела качения 4, находящегося в исходном положении в чувствительной зоне 6. Выходной сигнал активного элемента 5 в этот момент соответствует исходному положению тела качения 4. Для сглаживания колебаний при вибрации в камеру 2 корпуса 1 с крышкой 7 залита демпфирующая жидкость 8. При наклоне устройства, фигура 2, поз.2, уменьшается угол α между поверхностью качения и плоскостью горизонта, а при достижении его отрицательного значения тело качения 4 начинает движение под действием собственной силы тяжести и выходит из чувствительной зоны 6. Это приводит к уменьшению электрической емкости между обкладками, что изменяет выходной сигнал активного элемента 5, сигнализируя тем самым о превышении допустимого угла наклона. Корпус 1 может быть изготовлен из диэлектрика или неметалла, а поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой. Тело качения 4 может быть выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска и изготовлено либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, либо из диэлектрика или неметалла, у последних с коэффициентом диэлектрической проницаемости большим, чем коэффициент диэлектрической проницаемости материала поверхности качения.
На фигуре 3, поз.1 представлено устройство для контроля угла наклона в непрерывном режиме, где в качестве активного элемента, создающего чувствительную зону и изменяющийся выходной сигнал, используют катушку индуктивности. В корпус 1, имеющий камеру 2 с поверхностью качения 3 в виде сферы, помещено металлическое тело качения 4, которое под действием собственной силы тяжести располагается в самой нижней точке - в исходном положении. Ниже поверхности качения установлен активный элемент 5, создающий чувствительную зону 6 и изменяющийся выходной сигнал, состоящий из катушки индуктивности. Расстояние между активным элементом 5 и поверхностью качения 3 отрегулировано таким образом, что обеспечивает присутствие тела качения 4, находящегося в любой точке поверхности качения 3, в чувствительной зоне 6. Для сглаживания колебаний при вибрации в камеру 2 корпуса 1 с крышкой 7 залита демпфирующая жидкость 8. При подаче переменного напряжения на катушку индуктивности образуется чувствительная зона 6 в виде изменяющегося магнитного поля, наводящего во внесенном металлическом теле качения 4 вихревые токи. В результате вырабатывается аналоговый выходной сигнал, величина которого может изменяется в зависимости от расстояния между телом качения 4 и активным элементом 5. При наклоне устройства, фигура 3, поз.2, тело качения 4 начинает движение под действием собственной силы тяжести и удаляется от активного элемента 5 тем дальше, чем больше угол α наклона устройства. Это приводит к непрерывному изменению выходного сигнала, что обеспечивает контроль наклона устройства в аналоговом режиме. Корпус 1 может быть изготовлен из диэлектрика или неметалла, а поверхность качения 3 может быть выполнена в виде сферы, либо в виде поверхности с заданной кривой. Тело качения 4 может быть выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска, и изготовлено либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла.
На фигуре 4, поз.1 представлено устройство для определения угла наклона дискретно, где активный элемент 5, создающий изменяющийся выходной сигнал, состоит из герметичного магнитоуправляемого контакта или датчика Холла, а для создания чувствительной зоны 6 используют тело качения 4, являющееся постоянным магнитом. В корпус 1, имеющий камеру 2 с поверхностью качения 3 в виде конуса, помещено тело качения 4, являющееся постоянным магнитом и образующее постоянное магнитное поле. Под действием собственной силы тяжести тело качения 4 располагается в самой нижней точке - в исходном положении. Угол α, образованный плоскостью горизонта и плоскостью качения, равен предельному углу наклона для конкретного устройства, и задается для каждого устройства индивидуально в зависимости от желаемой величины контролируемого угла наклона, и может находиться в диапазоне от 0 до 180°. Ниже поверхности качения установлен активный элемент 5, состоящий из герметичного магнитоуправляемого контакта (геркона) или датчика Холла. Расстояние между активным элементом 5 и поверхностью качения 3 отрегулировано таким образом, что верхняя поверхность активного элемента 5 находится в чувствительной зоне 6, созданной телом качения 4. Выходной сигнал активного элемента в этот момент соответствует положению тела качения 4 в исходной точке. Для сглаживания колебаний при вибрации в камеру 2 корпуса 1 с крышкой 7 залита демпфирующая жидкость 8. При наклоне устройства, фигура 4, поз.2, уменьшается угол α между поверхностью качения и плоскостью горизонта, а при достижении его отрицательного значения тело качения 4 начинает движение под действием собственной силы тяжести. При этом увеличивается расстояние между активным элементом 5 и телом качения 4, создающим чувствительную зону, что приводит к ослаблению постоянного магнитного поля в зоне верхней поверхности активного элемента и, как следствие, изменению выходного сигнала герметичного магнитоуправляемого контакта. Корпус 1 данного устройства может быть изготовлен из немагнитного материала, а поверхность качения 3 может быть выполнена в виде сферы, либо конуса, либо в виде поверхности с заданной кривой. Тело качения 4 может быть выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |
| СПОСОБ ОРГАНИЗАЦИИ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ НА КОММУТИРУЮЩИЙ ЭЛЕМЕНТ ДАТЧИКА ДЛЯ ЛОКАЦИИ ОБЪЕКТА В ЗОНЕ КОНТРОЛЯ И ДАТЧИК ДЛЯ ЛОКАЦИИ ОБЪЕКТА В ЗОНЕ КОНТРОЛЯ НА ЕГО ОСНОВЕ | 2014 |
|
RU2591183C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПЛОСКОСТИ | 2013 |
|
RU2521270C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА ПЛОСКОСТИ | 2014 |
|
RU2577804C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА ОБЪЕКТОВ С ПОМОЩЬЮ МАГНИТНОЙ ЖИДКОСТИ | 2014 |
|
RU2584094C2 |
| Способ определения угла наклона объекта | 2021 |
|
RU2764961C1 |
| ДАТЧИК УДАРА | 1999 |
|
RU2149459C1 |
| МОДУЛЬНО-ДИСКОВАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2008 |
|
RU2368996C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2000 |
|
RU2166203C1 |
| МОДУЛЬНО-ЦИЛИНДРИЧЕСКАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2008 |
|
RU2368994C1 |
Изобретение относится к измерительной технике и предназначено для определения угла наклона объектов в диапазоне от 0 до 180°. Технический результат: упрощение, повышение надежности, технологичности, легкая интеграция в существующие системы автоматизации технологических процессов, малый вес и габариты, стабильность выходных характеристик. Сущность: устройство включает корпус с крышкой, поверхность качения, совмещенную с внутренней поверхностью корпуса с созданием камеры в корпусе, тело качения, активный элемент, расположенный под поверхностью качения. При этом обеспечена возможность регулировки расстояния между активным элементом и поверхностью качения. Тело качения может быть выполнено в виде шара, цилиндра или диска и может представлять собой постоянный магнит. Активный элемент может быть выполнен в виде обкладок электрической емкости, катушки индуктивности, магнитоуправляемого контакта либо датчика Холла. 4 н. и 21 з.п. ф-лы, 4 ил.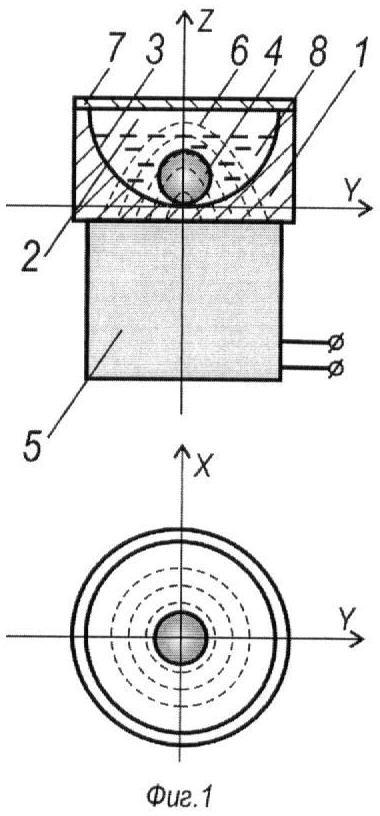
1. Способ определения угла наклона, включающий использование корпуса с крышкой, камеры, поверхности качения и тела качения, задание траектории движения тела качения под действием силы тяжести по поверхности качения при наклоне корпуса, создание чувствительной зоны, использование активного элемента, получение выходного сигнала, который зависит от степени наклона корпуса, отличающийся тем, что поверхность качения совмещают с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, активный элемент располагают вне камеры ниже поверхности качения, причем так, чтобы обеспечить возможность регулировки расстояния между ним и поверхностью качения, чувствительную зону создают таким образом, чтобы тело качения в своем исходном положении и верхняя поверхность активного элемента находились в ней, а изменяющийся выходной сигнал получают зависящим от расстояния между телом качения и активным элементом.
2. Способ по п.1, отличающийся тем, что чувствительную зону создают с помощью либо электрического поля, либо постоянного магнитного поля, либо изменяющегося магнитного поля.
3. Способ по п.1, отличающийся тем, что в качестве поверхности качения используют, либо конус, либо сферу, либо поверхность с заданной кривой.
4. Способ по п.1, отличающийся тем, что в качестве тела качения используют либо шар, либо цилиндр, либо диск.
5. Способ по п.1, отличающийся тем, что для обеспечения стабильности работы при вибрации применяют демпфирующую жидкость, которую помещают в камеру с телом качения.
6. Способ по п.2, отличающийся тем, что создание чувствительной зоны с помощью электрического поля осуществляют активным элементом, состоящим из металлических обкладок, обладающих электрической емкостью, которые располагают концентрически под поверхностью качения, при этом выходной сигнал получают в результате изменения величины емкости во время движения тела качения по поверхности качения относительно исходного положения.
7. Способ по п 6, отличающийся тем, что тело качения выполняют либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, либо из диэлектрика или неметалла, у последних с коэффициентом диэлектрической проницаемости большим, чем коэффициент диэлектрической проницаемости материала поверхности качения, а корпус и поверхность качения выполняют из диэлектрического материала или неметалла.
8. Способ по п.2, отличающийся тем, что создание чувствительной зоны с помощью изменяющегося магнитного поля осуществляют активным элементом, состоящим из катушки индуктивности, при этом выходной сигнал получают в результате изменения величины индуктивности при движении тела качения по поверхности качения относительно исходного положения.
9. Способ по п.8, отличающийся тем, что тело качения выполняют либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, а корпус и поверхность качения выполняют либо из диэлектрического материала, либо из неметалла.
10. Способ по п.2, отличающийся тем, что создание чувствительной зоны с помощью постоянного магнитного поля осуществляют телом качения, являющимся постоянным магнитом, а активный элемент выполняют состоящим либо из геркона, либо датчика Холла, выходной сигнал получают в результате изменения силы постоянного магнитного поля при движении тела качения по поверхности качения относительно исходного положения.
11. Способ по п.10, отличающийся тем, что корпус и поверхность качения выполняют из немагнитного материала.
12. Устройство для определения угла наклона, включающее корпус с крышкой, камеру, поверхность качения, тело качения, активный элемент, содержащий имеющие между собой электрическую емкость обкладки, которые выполнены создающими чувствительную зону и выходной сигнал, отличающееся тем, что поверхность качения совмещена с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, обкладки расположены концентрически, а сам активный элемент расположен под поверхностью качения, причем обеспечивается возможность регулировки расстояния между ним и поверхностью качения, при этом тело качения на поверхности качения в своем исходном положении находится в области чувствительной зоны, а расстояние между телом качения и активным элементом определяет величину выходного сигнала.
13. Устройство по п.12, отличающееся тем, что корпус выполнен либо из неметалла, либо из диэлектрика.
14. Устройство по п.12, отличающееся тем, что тело качения выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска, а также выполнено либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла, либо из диэлектрика или неметалла, у последних с коэффициентом диэлектрической проницаемости большим, чем коэффициент диэлектрической проницаемости материала поверхности качения.
15. Устройство по п.12, отличающееся тем, что поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой.
16. Устройство по п.12, отличающееся тем, что для обеспечения стабильности работы при вибрации в камеру с телом качения помещена демпфирующая жидкость.
17. Устройство для определения угла наклона, включающее корпус с крышкой, камеру, поверхность качения, тело качения, активный элемент, отличающееся тем, что поверхность качения совмещена с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, активный элемент выполнен в виде катушки индуктивности, создающей чувствительную зону и изменяющийся выходной сигнал, расположен под поверхностью качения, причем обеспечивается возможность регулировки расстояния между ним и поверхностью качения, при этом тело качения на поверхности качения в своем исходном положении находится в области чувствительной зоны, создаваемым переменным магнитным полем, образованным катушкой индуктивности, а расстояние между телом качения и активным элементом определяет величину выходного сигнала.
18. Устройство по п.17, отличающееся тем, что корпус выполнен либо из неметалла, либо из диэлектрика.
19. Устройство по п.17, отличающееся тем, что тело качения выполнено в виде либо шара, либо цилиндра, либо диска, а также выполнено либо из магнитного металла, либо из ферромагнитного металла, либо аморфного металла.
20. Устройство по п.17, отличающееся тем, что поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой.
21. Устройство по п.17, отличающееся тем, что для обеспечения стабильности работы при вибрации в камеру с телом качения помещена демпфирующая жидкость.
22. Устройство для определения угла наклона, включающее корпус с крышкой, камеру, поверхность качения, тело качения, активный элемент, отличающееся тем, что корпус выполнен из немагнитного материала, поверхность качения совмещена с внутренней поверхностью корпуса, создавая при этом камеру в теле корпуса, тело качения представляет собой постоянный магнит, который создает чувствительную зону, а активный элемент выполнен создающим выходной сигнал, представляет собой либо герметичный магнитоуправляемый контакт, либо датчик Холла, расположен под поверхностью качения, причем обеспечивается возможность регулировки расстояния между ним и поверхностью качения, а расстояние между телом качения и активным элементом определяет значение выходного сигнала.
23. Устройство по п.22, отличающееся тем, что тело качения выполнено либо в виде шара, либо в виде цилиндра, либо в виде диска, а также выполнено из намагниченного ферромагнетика.
24. Устройство по п.22, отличающееся тем, что поверхность качения выполнена в виде либо сферы, либо конуса, либо в виде поверхности с заданной кривой.
25. Устройство по п.22, отличающееся тем, что для обеспечения стабильности работы при вибрации в камеру с телом качения помещена демпфирующая жидкость.
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |
| Двухкоординатное устройство для определения углов наклона объектов | 1976 |
|
SU601565A1 |
| Датчик угла наклона | 1982 |
|
SU1053179A1 |
| Датчик углов наклона | 1974 |
|
SU513249A1 |
| JP 2007163184 A, 28.06.2007 | |||
| CN 101339023 A, 07.01.2009 | |||
| JP 2010164436 A, 29.07.2010 | |||
| JP 20038721 А, 10.10.2003 | |||
| US 7325322 В2, 05.02.2008. | |||

