Изобретение относится к охранной сигнализации и, конкретно, к датчикам удара магнитоэлектрического типа (то есть к датчикам, выходной электрический сигнал которых определяется скоростью изменения магнитного потока).
По отношению к рассматриваемому изобретению уровень техники определяется, исходя из следующих предпосылок. В системах охранной сигнализации используется ряд устройств, обнаруживающих наличие механического удара и проводящих оповещение охранной системы при таком обнаружении (или несколько видов оповещений - в зависимости от интенсивности удара). Как правило, охранные системы используют входные электрические сигналы оповещения, так что датчики удара также решают задачу формирования электрического выходного сигнала оповещения в ответ на механическое ударное воздействие.
В технической литературе наиболее часто описываются датчики удара механического типа. В таких датчиках имеется подвижный чувствительный инерционный элемент, занимающий строго определенное положение в состоянии покоя. Электрическими методами фиксируется нахождение чувствительного элемента в некоторой зоне покоя. При ударе чувствительный элемент выходит из зоны покоя, переходя, как правило, к затухающим колебаниям, при которых он неоднократно проходит через свою зону покоя и, наконец, перестает из нее выходить, что означает окончание реакции на удар. Таким образом, на выходе механического датчика формируется по сути дела двоичный сигнал, один уровень которого говорит о нахождении чувствительного элемента в зоне покоя, а другой свидетельствует о выходе чувствительного элемента из зоны покоя. Выходной сигнал механического датчика должен обрабатываться в системе охранной сигнализации для принятия решения о возможной выдаче соответствующего сигнала оповещения.
Одним из наиболее типичных примеров реализации датчиков удара механического типа является техническое решение, приведенное в описании патента Российской Федерации N 2029372 от 13.06.91, кл. G 08 B 13/02, в котором чувствительный элемент представляет собой упругий механический маятник с грузиком и подвижным контактом. При этом подвижный контакт размещен с возможностью замыкания с неподвижным контактом. Ударное механическое воздействие нарушителя приводит к возникновению колебаний маятника. В такт этим колебаниям происходят замыкания и размыкания между подвижным и неподвижным контактами, формирующие сигналы для охранной сигнализации.
Другим примером реализации датчиков удара механического типа является техническое решение, приведенное в описании патента США N 4247847 от 16.08.78, кл. G 08 B 13/08, НКИ 340-566. В данном техническом решении чувствительный элемент представляет собой зеркало на растяжках, которое после удара при механических колебаниях периодически прекращает передавать поток света от источника света к приемнику света. Выходные сигналы приемника света поступают в систему охранной сигнализации.
Еще одним характерным примером реализации датчиков удара механического типа является техническое решение, приведенное в описании авторского свидетельства СССР N 1012296 от 15.12.81, кл. G 08 B 13/02, в котором чувствительный элемент представляет собой постоянный магнит, двигающийся после внешнего ударного воздействия на датчик возвратно-поступательно по наклонному пазу. В нижней торцевой части этого паза расположена упругодемпфирующая прокладка (от которой отталкивается постоянный магнит при соударениях). Зона покоя для постоянного магнита располагается вблизи упругодемпфирующей прокладки. При нахождении в зоне покоя постоянный магнит воздействует на нормально разомкнутый магнитоуправляемый контакт и замыкает его. Возвратно-поступательное движение постоянного магнита по наклонному пазу сопровождается замыканиями и размыканиями магнитоуправляемого контакта, по которым в данном техническом решении система охранной сигнализации производит оценку внешнего ударного воздействия на датчик.
Для механических датчиков удара можно указать два основных недостатка: во-первых, грубый по своей сути двоичный выходной сигнал затрудняет принятие системой охранной сигнализации адекватного решения (то есть существует значительная вероятность формирования ошибочной сигнализации) и, во-вторых, эти датчики требуют механической подстройки на месте охраны (после установки на объекте охраны), поскольку положение и величина зоны покоя существенно зависят от наклона датчика в рабочем положении и от амплитуды и периода затухающих колебаний чувствительного элемента в зависимости от интенсивности контролируемых ударов.
В технической литературе описано несколько попыток преодоления указанных недостатков чисто механическими методами, однако подобные технические решения всегда обладают собственными, характерными лишь для них существенными недостатками. В качестве одной из таких попыток можно привести техническое решение из описания патента Российской Федерации N 2101766 от 18.02.94, кл. G 08 B 13/02, в котором роль чувствительного элемента выполняет массивный инерционный токопроводящий шар, который способен свободно перекатываться по дну корпуса датчика. Дно корпуса датчика при этом представляет собой часть внутренней поверхности сферы. На дне корпуса нанесены две токопроводящие дорожки, выступающие над поверхностью дна и изолированные друг от друга. Дорожки имеют форму архимедовых спиралей, повернутых одна относительно другой на 180o и находящихся взаимно одна внутри другой. В состоянии покоя шар либо замыкает между собой дорожки, либо не замыкает их. При ударе токопроводящий шар смещается, перекатываясь по дну корпуса датчика вплоть до нового успокоения. При этом происходят неоднократные замыкания и размыкания цепи, включающей в свой состав обе дорожки. Эти замыкания и размыкания являются сигналами, поступающими в систему охранной сигнализации.
Такой датчик не требует регулировки при наклонном рабочем положении, что является его большим преимуществом. То, что данный датчик реагирует не только на удар, но и на плавный наклон, нельзя отнести к недостаткам датчика - это просто его особенность. Однако то, что при механических вибрациях промышленного типа (например, от проходящей вблизи электрички) в данном датчике могут происходить дрожания шара, замыкающие и размыкающие дорожки и создающие видимость картины отработки удара, является крупным недостатком, характерным именно для данного датчика.
Доработки датчиков удара, связанные с отказом от чисто механического построения (с целью преодоления основных недостатков механических датчиков), сводятся к построению двух основных типов усовершенствованных датчиков удара. Один из этих типов усовершенствованных датчиков удара связан с использованием пьезокерамических элементов и не относится к тематике рассматриваемого в настоящем изобретении уровня техники. Другой тип уменьшения недостатков механических датчиков используется в датчиках удара, которые по аналогии с приборами можно назвать датчиками магнитоэлектрического типа. В этих датчиках чувствительный элемент подобран таким образом, что при его колебательном движении после механического удара, подлежащего контролю, возникает колебательное изменение магнитного потока. При колебательном изменении магнитного потока в катушке индуктивности наводится колебательно изменяющееся напряжение, пропорциональное скорости изменения магнитного потока. Это напряжение фильтруется и приводится к стандартной шкале во вторичном преобразователе, а уже с выхода вторичного преобразователя поступает в систему охранной сигнализации для принятия решения о включении соответствующего сигнала. Таким образом, вместо двоичного выходного сигнала формируется аналоговый сигнал, зависящий от скорости изменения магнитного потока.
Аналоговый сигнал всегда несет большую информацию, чем двоичный сигнал (хотя бы потому, что стандартными методами аналого-цифрового преобразования может быть сведен к целой группе двоичных сигналов). Поэтому анализ аналогового сигнала в системе охранной сигнализации (по сравнению с двоичным сигналом механических датчиков) должен уменьшить вероятность ошибочного срабатывания (или несрабатывания) сигнализации. Чувствительный элемент в магнитоэлектрическом датчике движется не только под влиянием механических сил. На него действуют и силы, вызванные электромагнитными воздействиями. А это означает уменьшение влияния на работу датчика его наклона. Кроме того, необходимым элементом датчика удара магнитоэлектрического типа является вторичный преобразователь. Производя подстройку датчика на рабочем месте, можно воздействовать на вторичный преобразователь, не изменяя заводских установок механических элементов.
Однако у датчиков удара магнитоэлектрического типа есть общий недостаток: чувствительность таких датчиков не может быть высокой. Действительно, колебания магнитного потока наводят переменный потенциал в катушке индуктивности. Источником этих колебаний служит колебательное движение чувствительного элемента. Для повышения чувствительности датчика необходимо располагать чувствительный элемент как можно ближе к катушке индуктивности, однако для такого приближения существует объективное ограничение: при колебательном движении нельзя допускать ударов чувствительного элемента по катушке индуктивности. В результате таких ударов могут выйти из строя как чувствительный элемент, так и катушка индуктивности.
Примерами датчиков удара магнитоэлектрического типа могут служить техническое решение по патенту США N 4584569 от 17.09.84, кл. G 08 B 21/00, НКИ 340-566, а также техническое решение по патенту США N 5483225 от 25.01.95, кл. G 08 B 13/02, НКИ 340-566), которое является наиболее близким по технической сущности к заявляемому.
Известное техническое решение по патенту США N 5483225 от 25.01.95 (наиболее близкое по технической сущности к заявляемому) представляет собой датчик удара, содержащий неподвижно закрепленные в корпусе магнитный узел и катушку индуктивности, соединенную электрически со входом вторичного преобразователя, выход которого подключен к первому входу блока включения, второй вход которого соединен со входом управления датчика, а выходы являются соответственно выходами сигналов тревоги и предупреждения датчика. Кроме того, в известный датчик удара входит магнитно-мягкий материал, закрепленный на кронштейне таким образом, что при механическом ударе возникают колебания магнитно-мягкого материала в поле магнитного узла, изменяющие магнитный поток в катушке индуктивности. В известном техническом решении магнитный узел может представлять собой постоянный магнит или электромагнит. В известном датчике удара на вторичный преобразователь подается электрический потенциал, формируемый в витках катушки индуктивности при изменении магнитного потока.
Для данного технического решения в полной мере справедлив сформулированный выше общий недостаток датчиков удара магнитоэлектрического типа. Действительно, в данном техническом решении колебания магнитного потока, наводящие переменный потенциал в катушке индуктивности 31 (нумерация соответствует нумерации из описания патента США N 5483225), вызываются колебательным движением магнитно-мягкого материала 34 на кронштейне поддержки 35. Источником магнитного потока в данной схеме служит магнитный узел 32. Однако для работы известного датчика удара необходимым условием является наличие настолько обширного пространства 33 между катушкой индуктивности 31 и магнитным узлом 32, чтобы в нем мог свободно колебаться магнитно-мягкий материал 34, не ударяя во время этих колебаний ни магнитный узел 32, ни катушку индуктивности 31. Естественно, такое условие существенно ограничивает чувствительность датчика удара.
Задачей, на решение которой направлено заявляемое изобретение, является полное исключение возможности ударов чувствительного элемента по катушке индуктивности и получение за счет этого технического результата: повышения чувствительности датчика удара магнитоэлектрического типа.
Поставленная задача решается тем, что в известный датчик удара, содержащий неподвижно закрепленные в корпусе магнитный узел и катушку индуктивности, соединенную электрически со входом вторичного преобразователя, выход которого подключен к первому входу блока включения, второй вход которого соединен со входом управления датчика, а выходы являются соответственно выходами сигналов тревоги и предупреждения датчика, введена неподвижно закрепленная в корпусе в непосредственной близости от катушки индуктивности пустотелая цилиндрическая рабочая камера, центральная продольная ось которой проходит через оба полюса магнитного узла, а во внутреннюю полость рабочей камеры установлен с возможностью свободного продольного перемещения постоянный магнит, полюса которого ориентированы вдоль продольной оси рабочей камеры соответственно полюсам магнитного узла.
В датчике удара центральная продольная ось рабочей камеры может быть ориентирована горизонтально при установке датчика удара на объекте охраны.
В датчике удара внутренняя полость рабочей камеры может быть заполнена демпфирующей жидкостью.
В датчике удара рабочая камера может быть расположена внутри катушки индуктивности и соосна ей.
В датчике удара при расположении рабочей камеры внутри катушки индуктивности и соосно ей катушка индуктивности может быть выполнена в виде винтовой токопроводящей дорожки, нанесенной на внешнюю поверхность рабочей камеры.
В датчике удара магнитный узел может быть выполнен в виде подковообразного постоянного магнита.
В датчике удара магнитный узел может быть выполнен в виде электромагнита.
В датчике удара магнитный узел может быть выполнен в виде двух постоянных магнитов.
В датчике удара полюса магнитного узла могут быть запрессованы непосредственно в торцы рабочей камеры.
В датчике удара магнитный узел может быть снабжен средствами изменения его конфигурации.
На фиг. 1 приведена структурная схема предлагаемого датчика удара, отдельные элементы которой представлены в виде схематического изображения сечения предлагаемого датчика удара по центральной продольной оси рабочей камеры. На фиг. 2 приведена блок-схема работы блока включения, с учетом его реализации при использовании программируемых (настраиваемых) многофункциональных средств.
В состав заявляемого датчика удара входит ряд элементов и блоков.
Корпус 1 предназначен для неподвижного крепления датчика удара к объекту охраны. Метод крепления корпуса к объекту охраны на фиг. 1 не показан (допустим любой возможный метод неподвижного соединения, например, винтовое или клеевое соединение). Корпус служит для размещения и неподвижной установки внутри него составных частей датчика удара. На фиг. 1, представляющем собой сечение внутренней части корпуса 1, приведены только сечения двух стоек корпуса: 1.1 и 1.2.
Рабочая камера 2 предназначена для неподвижной установки внутри корпуса 1 между стоек 1.1 и 1.2. По форме рабочая камера 2 может быть выполнена в виде герметичного пустотелого цилиндра. Внутренняя поверхность рабочей камеры 2 должна быть гладкой. Центральная продольная ось рабочей камеры при установке датчика удара на объекте охраны должна принимать положение, близкое к горизонтальному. При этом повышается чувствительность датчика. Внутренняя полость рабочей камеры 2 может быть заполнена демпфирующей жидкостью (например, машинным маслом). На фиг. 1 приведено сечение фронтальной плоскостью по центральной продольной оси примера реализации рабочей камеры 2.
Катушка индуктивности 3 представляет собой катушку с намотанным на ней проводом, неподвижно закрепленную внутри корпуса в непосредственной близости от рабочей камеры 2. На фиг. 1 приведено сечение катушки индуктивности 3 для частного случая соосного расположения катушки индуктивности 3 и рабочей камеры 2, при котором рабочая камера 2 располагается внутри катушки индуктивности 3. Частным случаем катушки индуктивности 3 может быть винтовая токопроводящая дорожка, нанесенная электрохимическими методами на внешнюю поверхность рабочей камеры 2.
Магнитный узел 4 может представлять собой подковообразный постоянный магнит, электромагнит, два постоянных магнита и т.п. Во время работы датчика удара полюса 4.1 и 4.2 магнитного узла 4 должны неподвижно располагаться внутри стоек 1.1 и 1.2 корпуса 1 так, чтобы продолжение продольной оси рабочей камеры 2 проходило бы через каждый из полюсов 4.1 и 4.2. В противном случае существенно снижается чувствительность датчика удара. Частным случаем является запрессовка полюсов 4.1 и 4.2 магнитного узла 4 в торцах рабочей камеры 2. Магнитный узел 4 может быть снабжен средствами изменения его конфигурации (в нерабочем состоянии). На фиг. 1 показано сечение части полюсов 4.1 и 4.2 без уточнения вида магнитного узла 4. При макетной аппаратурной реализации магнитный узел 4 был выполнен в виде двух постоянных магнитов.
Постоянный магнит 5 может иметь форму цилиндра или параллелепипеда. Он должен располагаться во внутренней полости рабочей камеры 2 таким образом, чтобы продольная ось рабочей камеры 2 проходила вблизи каждого из полюсов постоянного магнита 5. Размеры постоянного магнита 5 должны позволять ему свободно двигаться вдоль продольной оси рабочей камеры 2 и полностью исключать возможность переворота в любой из плоскостей, проходящих через продольную ось цилиндра рабочей камеры 2. Полюса постоянного магнита 5 должны располагаться относительно полюсов магнитного узла 4 таким образом, чтобы соответствующие одноименные полюса располагались существенно ближе разноименных (полюс "N" постоянного магнита 5 вблизи полюса "N" магнитного узла 4, а полюс "S" постоянного магнита 5 вблизи полюса "S" магнитного узла 4, как это и показано на фиг. 1).
Катушка индуктивности 3 электрически подключена ко вторичному преобразователю 6, в состав примера реализации которого входят последовательно соединенные фильтр и усилитель.
Вторичный преобразователь 6 является стандартным электрическим измерительным преобразователем с унифицированными выходными сигналами в виде напряжения. Подобные измерительные преобразователи широко рассмотрены в технической литературе, например, в главах 5 и 6 книги В.Ю.Кончаловского, Я.А. Купершмидта, Р. Я. Сыропятовой и Р.Р.Харченко "Электрические измерительные преобразователи", под редакцией Р.Р.Харченко, М.-Л.: Энергия, 1967.
Выход вторичного преобразователя 6 соединен с первым входом блока включения 7, второй вход которого подключен к цепям управления, а выходы являются соответственно выходами сигналов тревоги и предупреждения. В состав примера реализации блока включения 7 может входить аналого-цифровой преобразователь и узел программирования. При макетной аппаратурной реализации аналого-цифровой преобразователь был выполнен на стандартной микросхеме LM 2903, а узел программирования - на РIС16С 622 (фирмы Microchip Technology Inc., USA).
Работа предлагаемого датчика удара происходит следующим образом. Корпус 1 датчика удара, частями которого являются стойки 1.1 и 1.2, жестко крепится на объекте охраны. Поскольку внутри корпуса 1 неподвижно закреплены пустотелая рабочая камера 2 и катушка индуктивности 3, можно считать, что рабочая камера 2 и катушка индуктивности 3 неподвижно закреплены на объекте охраны. Кроме того, при работе датчика удара в его корпусе 1 неподвижно закреплен магнитный узел 4, частями которого являются полюса 4.1 и 4.2, соединенные со стойками 1.1 и 1.2 корпуса 1 датчика удара. При этом рабочая камера 2 и полюса 4.1 и 4.2 магнитного узла 4 должны располагаться так, чтобы центральная продольная ось рабочей камеры (имеющей форму цилиндра) проходила через оба полюса 4.1 и 4.2 магнитного узла 4. Магнитный узел 4 может быть снабжен средствами изменения его конфигурации, к которым могут относиться, например, регулировочные винты, входящие в состав магнитного узла 4.
Находящийся во внутренней полости рабочей камеры 2 постоянный магнит 5 имеет возможность свободного продольного перемещения внутри рабочей камеры 2. Полюса постоянного магнита 5 ориентированы вдоль центральной продольной оси рабочей камеры 2 таким образом, что его полюса расположены вблизи одноименных полюсов 4.1 и 4.2 магнитного узла 4. Одноименные магнитные полюса отталкиваются, а поскольку наличие рабочей камеры 2 не позволяет постоянному магниту 5 перевернуться, постоянный магнит 5 занимает положение покоя (то есть такое место внутри рабочей камеры 2, где уравновешиваются силы отталкивания одноименных полюсов магнитов 4 и 5).
Если объект охраны подвергается удару (который необходимо оценить с помощью рассматриваемого датчика удара), то происходит резкий сдвиг (или несколько сдвигов) корпуса 1 датчика вместе с указанными выше закрепленными на нем элементами. В силу своей инерционности постоянный магнит 5 не сдвигается вместе с корпусом 1 (или сдвигается на существенно меньшие промежутки, чем корпус 1). Таким образом, в результате удара в датчике удара происходит смещение постоянного магнита 5 внутри рабочей камеры 2. Величина смещения постоянного магнита 5 внутри рабочей камеры 2 относительно положения покоя характеризует интенсивность удара.
Рассмотрим, какие силы действуют на постоянный магнит после его смещения внутри рабочей камеры. В результате такого смещения один из полюсов постоянного магнита (пусть для определенности "N") сближается с одноименным полюсом "N" 4.1 магнитного узла 4. Сила отталкивания постоянного магнита 5 от полюса "N" 4.1 магнитного узла 4, направленная вдоль оси рабочей камеры 2, после смещения превышает силу отталкивания постоянного магнита 5 от полюса "S" постоянного магнита 5. То есть появляется равнодействующая возвращающая сила FВОЗВР, стремящаяся возвратить постоянный магнит 5 в положение покоя.
При рассмотрении простейшего (с точки зрения расчета) случая, когда магнитный узел 4 представляет собой два магнита, аналогичных постоянному магниту 5, возвращающая сила FВОЗВР может быть рассчитана по следующей формуле:
где I - намагниченность постоянного магнита 5;
V - объем постоянного магнита 5;
l - расстояние между полюсами 4.1 и 4.2 магнитного узла 4;
Δl - смещение постоянного магнита 5 от положения покоя.
Под действием возвращающей силы FВОЗВР постоянный магнит 5 начинает ускоренное движение в сторону, противоположную полюсу "N" магнитного узла 4 (то есть по направлению к положению покоя постоянного магнита 5). При движении постоянного магнита 5 появляется тормозящая сила трения. Кроме того, при движении постоянного магнита 5 происходит изменение магнитного потока в катушке индуктивности 3. В катушке индуктивности 3 наводится электродвижущая сила и начинает течь ток. В результате этого у катушки индуктивности 3 формируется магнитное поле, которое вызывает силу магнитного взаимодействия с магнитным полем постоянного магнита 5, тормозящую (в соответствии с правилом Ленца) движение постоянного магнита 5 внутри рабочей камеры 2.
Постоянный магнит 5, в конце концов, попадает в положение покоя (где FВОЗВР = 0), однако остановиться в этом положении не может, проходя его по инерции и двигаясь после этого замедленно по направлению к полюсу "S" 4.2 магнитного узла 4. В какой-то точке постоянный магнит 5 останавливается и начинает ускоренное движение в обратную сторону: к положению покоя (под действием той же возвращающей силы FВОЗВР). Таким образом, постоянный магнит 5 после удара начинает колебаться внутри рабочей камеры 2 вокруг своего положения покоя. Колебания постоянного магнита 5 должны затухать, поскольку на постоянный магнит 5 действуют две указанные выше тормозящие силы (сила трения и сила магнитного взаимодействия магнитных полей катушки индуктивности 3 и постоянного магнита 5). В конце концов, постоянный магнит 5 останавливается вблизи своего положения покоя. Собственная частота колебаний ω постоянного магнита 5 может быть определена по следующей формуле:
где М - масса постоянного магнита 5.
Сила земного притяжения должна слабо сказываться на движении постоянного магнита 5, поскольку оси рабочей камеры 2 и направление движения постоянного магнита 5 должны быть перпендикулярны направлению силы земного притяжения. Однако, в принципе, возможны такие объекты охраны, которые не дают возможности установки датчика удара в положении, обеспечивающем расположение рабочей камеры 2, близкое к горизонтальному. Для таких случаев к силам, оказывающим влияние на движение постоянного магнита 5, добавляется составляющая силы земного притяжения, действующая вдоль направления оси рабочей камеры 2.
Рабочая камера 2, в которой движется постоянный магнит 5, может быть заполнена демпфирующей жидкостью (например, машинным маслом). При этом демпфирующая жидкость должна быть химически нейтральна по отношению к материалу рабочей камеры 2 и постоянного магнита 5, и не замерзать, не густеть и не испаряться в интервале рабочих температур датчика удара. Демпфирующая жидкость препятствует разрушению при трении поверхностей постоянного магнита 5 и рабочей камеры 2, а также препятствует примерзанию постоянного магнита 5 к стенке рабочей камеры 2.
При движении постоянного магнита 5 в продольном направлении внутри рабочей камеры 2, изменяется магнитный поток для катушки индуктивности 3. Это приводит к возникновению в витках катушки индуктивности 3 переменной электродвижущей силы. Таким образом, после удара, которому подвергается объект охраны, катушка индуктивности 3 становится источником переменного электрического потенциала, который попадает на вторичный преобразователь 6. Вторичный преобразователь 6 приводит поступающие на него сигналы к уровням напряжения выбранной номинальной шкалы и передает их на блок включения 7, входящий в состав охранной системы.
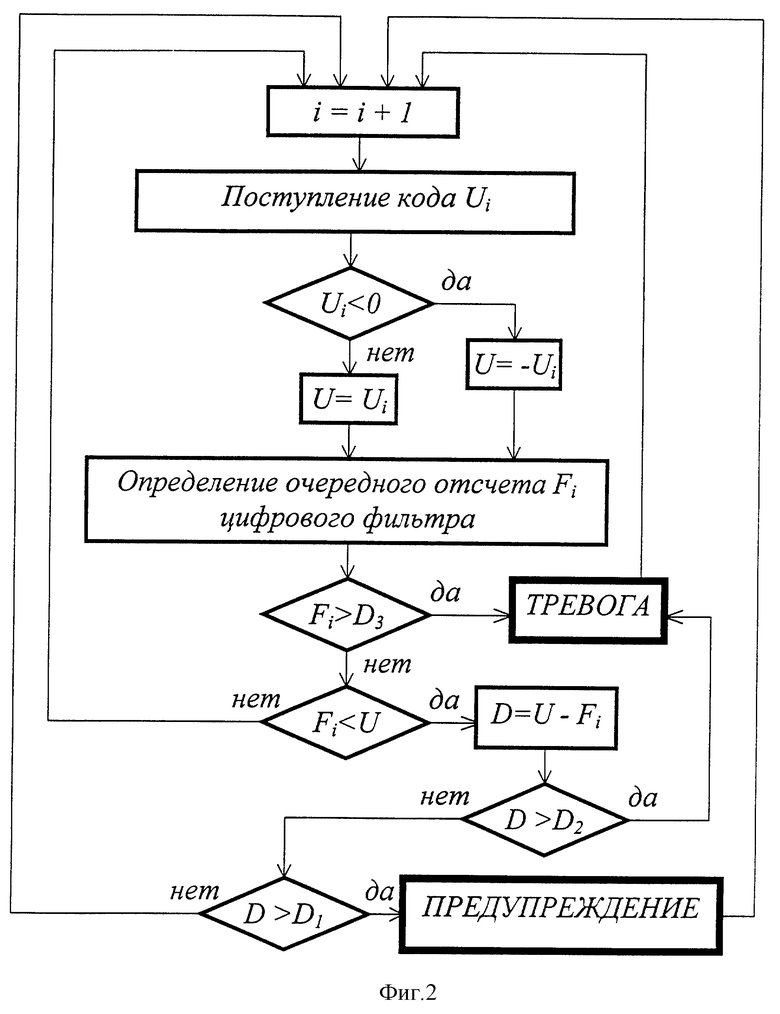
Блок включения 7 осуществляет аналого-цифровое преобразование сигналов вторичного преобразователя 6 и анализирует получаемые цифровые коды в соответствии со своим алгоритмом работы. При этом блок включения 7 делает вывод либо о случайном характере сигнала, либо о наличии удара и о его параметрах. В зависимости от параметров удара, блок включения 7 формирует либо сигнал предупреждения, либо сигнал тревоги.
На фиг. 2 приведена блок-схема алгоритма анализа цифровых кодов блоком включения 7 и формирования сигналов предупреждения и тревоги, использованного при макетной аппаратурной реализации. Параметры D1, D2, D3 характеризуют место рабочей установки датчика удара и вводятся потребителем непосредственно после установки датчика удара на объекте охраны. Методы введения этих параметров также входят в алгоритм работы блока включения 7, однако, по мнению авторов и заявителя, они не относятся к предмету настоящего изобретения и, для простоты, опущены в блок-схеме алгоритма, приведенной на фиг. 2. В качестве цифрового фильтра при аппаратурной реализации использовался цифровой фильтр первого порядка.
Итак, при установке датчика удара на объекте охраны пользователь должен подстроить блок включения 7 под параметры удара, подлежащего фиксации на уровнях предупреждения и тревоги (то есть, ввести параметры D1, D2, D3). При этом вся подстройка должна относиться только к блоку включения 7 и не требовать изменений положения рабочей камеры 2, катушки индуктивности 3 или магнитного узла 4. Для всех этих элементов установка происходит при изготовлении датчика удара в заводских условиях, после чего положение данных элементов жестко фиксируется компаундом или подобным ему материалом.
Реальная установка датчика удара на объекте охраны может быть (вследствие специфики собственно объекта охраны) связана с необходимостью выбора такого положения датчика удара, при котором центральная продольная ось рабочей камеры 2 оказывается в положении, существенно отличающемся от горизонтального. В таком исключительном случае потребитель может использовать данный датчик удара после изменения конфигурации магнитного узла 4 (например, с помощью специальных регулировочных винтов, входящих в состав магнитного узла 4).
Конструкция датчика полностью исключает удары одних элементов по другим. При этом нет никаких препятствий по расположению катушки индуктивности 3 в оптимальном месте корпуса 1 (с точки зрения повышения чувствительности). Если при изготовлении на заводе в условиях серийного производства не удается оптимально расположить катушку индуктивности 3, то выходные параметры вторичного преобразователя 6 можно привести к унифицированной шкале путем подстройки непосредственно вторичного преобразователя 6. То есть, для блока включения 7 всегда обеспечиваются унифицированные входные сигналы, и может быть разработана единая методика установки датчиков удара на объекте охраны с проведением стандартизированных настроек сигналов управления блоком включения 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2098908C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПОДЛИННОСТИ БАНКНОТЫ | 1995 |
|
RU2096830C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ФЕРРОМАГНИТНЫХ ЧАСТИЦ ИЗНОСА В МАСЛЕ | 1997 |
|
RU2131552C1 |
| МЕХАНИЗМ ДЛЯ РАЗБЛОКИРОВАНИЯ РИГЕЛЯ ЗАМКА | 1991 |
|
RU2027836C1 |
| ВЫСОКООБОРОТИСТЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1996 |
|
RU2110879C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455616C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1992 |
|
RU2016333C1 |
| УСТРОЙСТВО ДЛЯ ОХРАНЫ ОБЪЕКТА | 1993 |
|
RU2070116C1 |
| СПОСОБ СБОРКИ ГРОМКОГОВОРИТЕЛЯ | 1996 |
|
RU2098926C1 |
| ИЗМЕРИТЕЛЬ РАСХОДА ЖИДКИХ И ГАЗООБРАЗНЫХ СРЕД | 1996 |
|
RU2129700C1 |
Изобретение относится к области охранной сигнализации, конкретно, к датчикам удара. Технический результат состоит в повышении чувствительности. Датчик удара содержит неподвижно закрепленные в корпусе магнитный узел и катушку индуктивности. Катушка индуктивности соединена электрически со входом вторичного преобразователя, выход которого подключен к первому входу блока включения. Второй вход блока включения соединен со входом управления датчика, а выходы являются выходами сигналов тревоги и предупреждения датчика. В датчик введена неподвижно закрепленная в корпусе в непосредственной близости от катушки индуктивности пустотелая цилиндрическая рабочая камера. Центральная продольная ось рабочей камеры проходит через оба полюса магнитного узла. Во внутреннюю полость рабочей камеры установлен с возможностью свободного продольного перемещения постоянный магнит, полюса которого ориентированы вдоль продольной оси рабочей камеры соответственно полюсам магнитного узла. 9 з. п. ф-лы, 2 ил.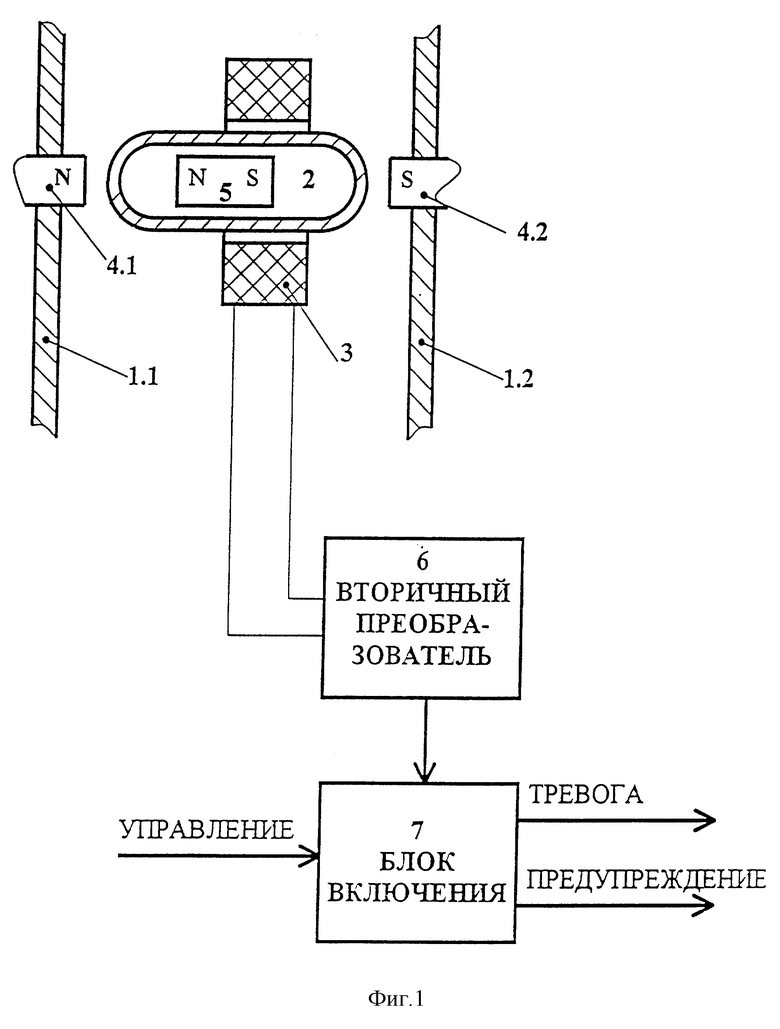
| US 5483225 А, 01.09.1996 | |||
| УСТРОЙСТВО ВКЛЮЧЕНИЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ПРИ ПОПЫТКЕ УГОНА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2040415C1 |
| Устройство включения тревожной сигнализации при попытке угона транспортного средства | 1991 |
|
SU1799757A1 |
| Автоматический пусковой реостат для асинхронных двигателей | 1926 |
|
SU4229A1 |
| ПРОТИВОМИКРОБНЫЕ ПОЛИПЕПТИДЫ ИЗ PSEUDOPLECTANIA NIGRELLA | 2002 |
|
RU2336278C2 |
| DE 4139070 А1, 25.06.1992 | |||
| DE 3809126 А1, 05.10.1989 | |||
| US 4584569 А, 22.04.1986 | |||
| ДАТЧИК ОХРАННОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2101766C1 |
| Инерционный электроконтактный датчик для устройства сигнализации | 1981 |
|
SU1012296A1 |
| US 4247847 А, 27.01.1981 | |||
| ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1992 |
|
RU2029373C1 |

