Настоящее изобретение относится к технике лазерного, светового излучения и, в частности, может быть использовано для определения положения лазерного излучателя.
Известна проблема облучения самолетов при посадке на аэродром лазерным лучом от лазерной указки. Облучение пилота в момент и во время посадки самолета посадки чревато тем, что пилот в течение некоторого времени (адаптации) теряет возможность видеть посадочную полосу и различать приборы, что может привести к авиакатастрофе, гибели пассажиров и экипажа самолета.
В настоящее время не существуют методы и приборы обнаружения местоположения злоумышленника с лазерным излучателем.
Известен способ определения местоположения источника света, реализуемый «Светодальномером» по патенту РФ №2164005, G01C 3/08, 13.05.1998, включающий измерение частоты импульсов излучения, прием отраженных сигналов, их сравнение и определение расстояния до светового объекта по формуле

где c - скорость света;
Fc - импульсов излучения;
Fo - опорная частота, пропорциональная калиброванному расстоянию Lo;
Lo - калиброванное расстояние.
Светодальномер, реализующий способ, содержит лазер, генератор, приемник излучения, частотомер, инвертор, поворотную призму для ввода части излучения и устройство сравнения.
Однако известный способ и реализующий его светодальномер не способны в динамическом режиме определить положение источника светового излучения в пространстве, т.е. в момент неожиданного появления излучающего источника, с любой стороны.
Целью изобретения является достижение технического результата по расширению функциональных возможностей за счет создания способности определения расстояния и местоположения нахождения излучателя в динамических условиях.
Указанный технический результат достигается тем, что в известном способе, включающем лазерное излучение, предлагается создать на разных высотах две лазерные плоскости, фиксировать точки пересечения лазерных плоскостей с лучом лазерного искомого излучателя, определить расстояния до этих пересечений, выполнить виртуальную траекторию между указанными двумя точками пересечения и экстраполировать ее на земную поверхность.
Указанный технический результат для устройства достигается тем, что к известному светодальномеру предлагается дополнительно ввести высокое сооружение, например вышку управления полетами, на которой на разных высотах разместить два вращающихся светодальномера со встроенными лазерными излучателями, каждый из которых совмещен со своей видеокамерой, при этом оба выхода светодальномеров через схему совпадения И соединить со своими двигателями вращения и непосредственно с компьютером, кроме того, видеокамеру верхнего светодальномера предлагается соединить с компьютером, на мониторе которого отражено обозреваемое пространство.
Изобретение поясняется графическими материалами.
На Фиг.1 представлена пространственно-конструктивная схема реализации способа, на Фиг.2 представлена блок-схема определения координаты излучателя.
Устройство, реализующее способ, содержит
1 - вышку наблюдения за полетами;
2, 3 - светодальномеры со встроенными лазерами (на Фиг.1 не показаны);
4, 5 - видеокамеры, совмещенные со светодальномерами 2, 3;
6, 7 - двигатели вращения светодальномеров 2, 3;
8 - компьютер;
9 - схема совпадения;
10 - лазерный излучатель.
Устройство представляет собой высокое сооружение, например вышку управления полетами 1, на которой на разных высотах размещены вращающиеся светодальномеры 2, 3 со встроенными лазерными излучателями, каждый из которых совмещен со своей видеокамерой 4, 5.
Оба выхода светодальномеров 2, 3 через схему совпадения И 9 соединены со своими двигателями вращения 6, 7 и непосредственно с компьютером 2. На Фиг.2 для исключения затемнения чертежа эта связь показана одной линией.
Кроме того, видеокамера 4 верхнего светодальномера 2 соединена с компьютером 8. Это сделано для получения изображения на мониторе компьютера обозреваемого пространства. При этом каждая точка обозреваемого пространства имеет координаты.
Способ реализуется следующим образом.
На первом этапе значения высот h1, h2 расположения светодальномеров 2, 3 вводятся в компьютер 8 и вычисляется их разность, т.е. длина катета АВ треугольника АВС, см. Фиг 1.
Светодальномеры 2, 3, совмещенные с видеокамерами 4, 5, приводятся в синхронное вращение двигателями 10, 11 относительно вертикальной оси. Учитывая, что светодальномеры 2, 3 имеют свои лазеры, установленные на разной высоте, в районе аэродрома, они создают в обозреваемом пространстве две горизонтальные лазерные плоскости.
При появлении облучающего самолет лазерного луча 12, который находится на земле, происходит его пересечение с лазерными плоскостями.
При этом в точках пересечения возникают световые вспышки, расстояние до которых фиксируется каждым светодальномером 2 и 3 и расстояния до них вводятся в компьютер 8, где вычисляется их разность, т.е. длина катета ВС треугольника АВС, см. Фиг 1.
Одновременно с этим, учитывая, что выходы светодальномеров 2, 3 подключены к схеме совпадения И 9, то при появлении на ее входе одновременно двух сигналов от вспышек, с ее выхода на двигатели вращения 10, 11 подается стоп-сигнал, который останавливает вращение светодальномеров 2, 3. При этом определяют направления на каждую из точек пересечения луча лазерного излучателя с лазерными плоскостями и соответственно геометрические координаты указанных точек.
Зная геометрические координаты указанных точек плоскости и рельеф местности, окружающей аэродром, определяют направление на источник излучения.
Таким образом в компьютере 8 имеются значения двух катетов АВ и ВС, по которым определяется тангенс угла и угол наклона «а» излучающего луча. Эти данные запоминаются для истории поиска.
Оператор, увидев вспышки на лазерных плоскостях, запоминает их местоположение путем фиксации через опцию компьютера «PrintScreen», после чего, используя графическую программу компьютера, например «Рисование», проводит прямую между ними, экстраполируя ее на поверхность земли. При этом все объекты, расположенные возле конца этой линии, являются объектами, в которых может быть расположен лазер злоумышленника.
Заявленное изобретение по сравнению с предшествующим методом выявления местоположения излучающего источника, когда по устному сообщению пилота облученного самолета приблизительно определялся район нахождения излучателя, позволяет с высокой точностью выйти на здание, сооружение или улицу, с которых проводилось облучение, и принять оперативные меры к задержанию злоумышленника.
Настоящее изобретение является новым, что говорит о его соответствии критерию патентоспособности «новизна».
Настоящее изобретение может быть изготовлено и смонтировано в мастерских аэродромного обслуживания, что говорит о его соответствии критерию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕТОЛИДЕР | 2011 |
|
RU2443450C1 |
| ГЕНЕРАТОР ГИДРОЭЛЕКТРОЭНЕРГИИ | 2013 |
|
RU2518011C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОБРАЗОВАНИЯ ЛЕДЯНЫХ НАРОСТОВ НА КРЫШАХ | 2013 |
|
RU2520583C1 |
| ТРОТУАРНАЯ СНЕГОУБОРОЧНАЯ МАШИНА | 2011 |
|
RU2474640C1 |
| ЭЛЕКТРОГИДРОСИСТЕМА | 2013 |
|
RU2519842C1 |
| СИСТЕМА ДЛЯ ТРЕНИРОВКИ ЛЫЖНИКОВ И СПОСОБ ЕЕ РЕАЛИЗАЦИИ | 2011 |
|
RU2451533C1 |
| БАГАЖНОЕ УСТРОЙСТВО ДЛЯ СНА С ТРАНСПОРТЕ | 2014 |
|
RU2560293C1 |
| ТРЕНАЖЕР ДЛЯ БОКСЕРА | 2012 |
|
RU2502540C1 |
| ОПОРА ДЛЯ СНА В ТРАНСПОРТЕ | 2014 |
|
RU2546423C1 |
| МУЗЫКАЛЬНЫЙ КОНСТРУКТОР | 2011 |
|
RU2465943C1 |

Изобретение относится к технике лазерного, светового излучения и, в частности, может быть использовано для определения положения лазерного излучателя. Технический результат - расширение функциональных возможностей за счет обеспечения возможности определения расстояния и местоположения нахождения излучателя в динамических условиях. Согласно предложенному способу на разных высотах создают две лазерные плоскости, фиксируют точки пересечения лазерных плоскостей с лучом лазерного излучателя, определяют расстояния до пересечений, проводят виртуальную траекторию между двумя точками пересечения и экстраполируют ее на земную поверхность. Устройство, реализующее указанный способ, содержащее светодальномер, дополнительно содержит высокое сооружение, например вышку управления полетами, на которой на разных высотах размещены два вращающихся светодальномера со встроенными лазерными излучателями, каждый из которых совмещен со своей видеокамерой, при этом выходы светодальномеров через схему совпадения И соединены со своими двигателями вращения и непосредственно с компьютером, кроме того, видеокамера верхнего светодальномера соединена с компьютером, на мониторе которого отражено обозреваемое пространство. 2 н.п. ф-лы, 2 ил.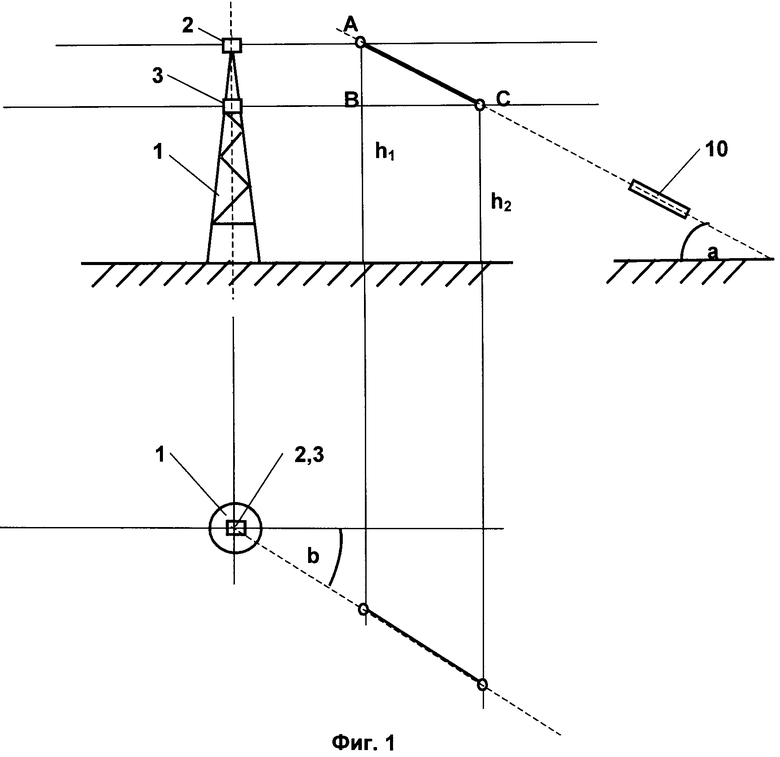
1. Способ определения местоположения лазерного излучения, включающий определение расстояния до источника светового излучателя, отличающийся тем, что на разных высотах создают две лазерные плоскости, фиксируют точки пересечения лазерных плоскостей с лучом лазерного излучателя, определяют расстояния до пересечений, проводят виртуальную траекторию между двумя точками пересечения и экстраполируют ее на земную поверхность.
2. Устройство для определения местоположения лазерного излучения, содержащее светодальномер, отличающееся тем, что дополнительно содержит высокое сооружение, например вышку управления полетами, на которой на разных высотах размещены два вращающихся светодальномера со встроенными лазерными излучателями, каждый из которых совмещен со своей видеокамерой, при этом выходы светодальномеров через схему совпадения «И» соединены со своими двигателями вращения и непосредственно с компьютером, кроме того, видеокамера верхнего светодальномера соединена с компьютером, на мониторе которого отражено обозреваемое пространство.
| RU 2006115467 A, 10.11.2007 | |||
| 0 |
|
SU90193A1 | |
| Цепная колосниковая решетка | 1930 |
|
SU21305A1 |
| EP 936518 B1, 12.06.2002 | |||
| EP 1264601 A2, 11.12.2002. | |||

