Устройство для измерения черепа относится к области биологии и медицины и может быть использовано для краниологических исследований в анатомии, медицинской и исторической антропологии, судебной медицине, биологии.
Известен кубус-краниофор, предназначенный для закрепления черепа в нужном положении, и диаграф, позволяющий выполнить обвод черепа карандашом на листе бумаги (Алексеев В.П., Дебец Г.Ф. Краниометрия. Методика антропологических исследований. - М.: Наука, 1964. - С.96-100). Кубус-краниофор состоит из системы планок, ограничивающих пространство в виде куба, в котором с помощью системы винтов устанавливается и закрепляется череп. Диаграф состоит из подставки для вертикальной планки с миллиметровой градуировкой и укрепленными на ней верхней планки с изогнутой иглой и нижней планки с карандашом. Для получения обвода черепа диаграф перемещают вокруг краниофора, касаясь иглой поверхности черепа, при этом карандаш оставляет контур на подложенном под краниофор листе бумаги.
Недостаток заключается в том, что для получения графического контура необходим контакт иглы диаграфа с поверхностью черепа, что может повредить объект в случае его плохой сохранности, а также механический способ получения результата.
Из известных наиболее близким по технической сущности является краниометр Гохмана (Алексеев В.П., Дебец Г.Ф. Краниометрия. Методика антропологических исследований. - М.: Наука, 1964. - С.101-105), содержащий краниофор, укрепленный на подвижной планке, помещенный в центр прямоугольной подставки, и металлического круга, градуированного с интервалом в 1°, на котором укреплена свободно двигающаяся каретка с подвижной линейкой, перпендикулярной к касательной круга и градуированной с точностью до 1 мм. Круг поворачивается вокруг своей оси на 90°. Необходимые параметры снимаются путем измерения расстояния от круга до поверхности черепа через интервалы, определяемые исследователем.
Недостаток заключается также в необходимости механического контакта с поверхностью черепа и механического способа получения данных.
Предлагаемое изобретение направлено на исключение механического контакта с поверхностью черепа, максимально щадящий способ установки и фиксации черепа в нужном положении, снижение погрешностей измерений, исключение влияния субъективных факторов при угловом позиционировании объекта (ошибок оператора).
Техническим результатом является получение краниограмм (обводов поверхности черепа) в любой интересующей проекции объектов любой сохранности с возможностью сравнения полученных данных с результатами исследований, проведенных с использованием традиционного механического оборудования.
Это достигается тем, что в устройство для измерения черепа, содержащее блок фиксации объекта (черепа) и измерительный прибор,
согласно предлагаемому изобретению дополнительно введены механизм автоматического поворота объекта, выполненный в виде опорного диска со сменными винтовыми упорами, имеющими возможность коррекции их высоты и положения относительно оси вращения, приводимый во вращение шаговым двигателем, блок управления шаговым двигателем, обеспечивающий автоматическую подачу предварительно установленного количества импульсов, соответствующего угловому шагу поворота объекта, лазерный дальномер, обеспечивающий измерение расстояния до поверхности объекта, механизм вертикального и горизонтального перемещения лазерного дальномера.
При этом механизм поворота с опорным диском и винтовыми упорами позволяет зафиксировать объект в необходимом положении, шаговый двигатель обеспечивает автоматический поворот объекта вокруг оси на 360° с угловым шагом от 0,9° (400 точек измерения) до 13,5° (27 точек измерения), что исключает субъективные ошибки при угловом позиционировании объекта.
Применение лазерного дальномера позволяет проводить измерения щадящим способом, исключающим механические контакты с объектом, что особенно важно при исследовании объектов плохой сохранности. Механизм вертикального и горизонтального перемещения лазерного дальномера дает возможность послойного сканирования поверхности объекта с заданным интервалом, а также проведение измерений отдельных точек. Данные измерений вносятся в электронные таблицы компьютера, где производятся вычисления геометрических параметров объекта путем вычитания из результата каждого измерения величины расстояния от базы отсчета лазерного дальномера до оси вращения объекта (константа для данного краниометра).
Введение новых элементов и связей между ними обеспечивает решение поставленной задачи.
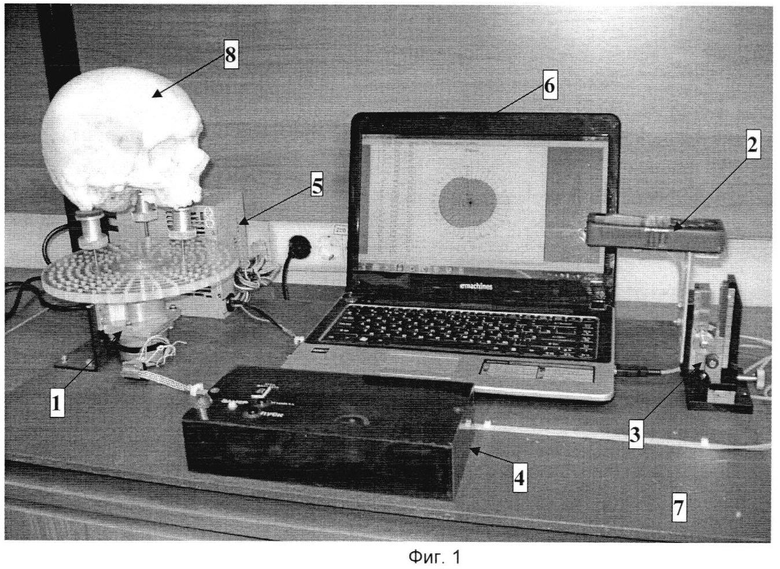
На фиг.1 изображен общий вид краниометрического лазерного комплекса.
На фиг.2 показан механизм поворота и ориентации.
На фиг.3 - узел горизонтального и вертикального перемещения лазерного дальномера.
На фиг.4 - структурная схема комплекса.
На фиг.5 - общий вид блока электронных узлов.
Устройство состоит из (фиг.1):
1 - механизма поворота и ориентации (МПО),
2 - лазерного дальномера (ЛД), установленного на
3 - узле вертикального и горизонтального перемещения (УВГП),
4 - схемы управления (СУ),
5 - источника питания (ИП),
6 - компьютера,
7 - основания.
Объект исследования (ОИ) 8 устанавливается на МПО.
Механизм поворота и ориентации (МПО) (фиг.2) выполнен на основе шагового двигателя (9) фирмы DUNASUN типа 4SHG-023A 39S с шагом 1,8° и редуктором ½, в результате угловой шаг поворота опорного диска (10) составляет 0,9°, посредством шагового двигателя (ШД) обеспечивает поворот ОИ на заданный угол по команде СУ. Ориентация ОИ в пространстве осуществляется с помощью контрируемых винтовых упоров ВУ (11), оснащенных вращающимися на подшипниках дисковыми площадками, поверхность которых, для лучшего сцепления с ОИ, оклеена мягкой резиной. Такая конструкция ВУ позволяет при ориентировании ОИ относительно вертикальной оси оставлять его неподвижным.
Вертикальное положение ОИ может изменяться путем вворачивания ВУ в радиально расположенные отверстия опорного диска, установленного на ось редуктора ШД.
ЛД марки DISTOТМD3 установлен на УВГП (фиг.3) и позволяет измерять расстояние от заданной базы до ОИ (8) по команде СУ. Положение по вертикали и горизонтали ЛД можно изменять с помощью винтов вертикального (12) и горизонтального перемещения (13) с дискретностью 0.1 мм согласно нониусным шкалам. Режимы работы ЛД программируются согласно инструкции, прилагаемой к нему изготовителем.
Согласно описанию производителя на ЛД диаметр измерительного луча лазера составляет 6 мм, при этом площадь пятна на ОИ не позволила бы проводить измерения мелких фрагментов с достаточной точностью. Для снижения погрешности измерений, вызванной такой большой площадью пятна, на выходную оптическую систему ЛД установлена диафрагма, уменьшающая эту площадь в 16 раз по сравнению с заводской.
ИП обеспечивает соответствующим питанием все компоненты комплекса: СУ, МПО, ЛД.
Компьютер (6) может быть любым, с соответствующим решаемым задачам программным обеспечением.
Все узлы и элементы комплекса смонтированы на основании 7 (фиг.1).
Схема управления (СУ) (фиг.4) содержит: управляемый генератор (УГ) (14), частота следования импульсов с которого управляется подстроечным резистором R1 (15); регистр (16); ключи управления ШД (17); блок управления (БУ) (18); двоичные счетчики (СИ1 (19), СИ2 (20)); схему совпадения (=) (21); дешифратор 2/7 (Д) (22); семисегментный индикатор (И) (23); транзисторный ключ (ТК) (24); три кнопки управления (К1 (25), К2 (26), К3 (27)).
Компоненты схемы управления работают следующим образом.
УГ генерирует импульсы с частотой, регулируемой резистором R1, обеспечивающей угловое перемещение вала ШД в пределах его механических возможностей. Импульсы с УГ поступают на вход регистра Р, работающего в коде Джонсона.
Одновременно импульсы с УГ поступают на входы СИ1, СИ2 и транзисторный ключ (ТК).
ТК с приходом каждого импульса подает сигнал на индикатор И, запятая которого подает световой сигнал, свидетельствующий о работе УГ и поступлении этих импульсов на Р, СИ1 и СИ2.
Счетчик СИ1 отсчитывает число импульсов, поступивших с УГ на вход регистра Р.
Счетчик СИ2 необходим для установки числа импульсов, обеспечивающих поворот на заданный угол опорного диска МПО. Состояние СИ2 посредством дешифратора и индикатора позволяет визуально контролировать число импульсов, установленное исследователем для поворота ОИ на заданный угол.
При совпадении кодов счетчиков СИ1 и СИ2 схема совпадения (=), выполненная по схеме «Исключающее ИЛИ», подает сигнал на блок управления, который запрещает подачу импульсов с УГ на Р, СИ1 и СИ2.
Дешифратор Д преобразует двоичный код счетчика СИ2 в код семисегментного индикатора И, показывающего число импульсов, введенное в этот счетчик при установке.
Показания индикатора, соответствующие числу импульсов, введенных в СИ2, приведены в таблице 1.

Регистр Р управляет ключами управления ШД, выполненными по схеме Дарлингтона и подающими токовые импульсы на обмотки ШД, которые, в свою очередь, зашунтированы диодами, компенсирующими возникновение противо-э.д.с., возникающих при закрывании ключей управления ШД. При появлении на БУ с (=) сигнала запрета подачи импульсов в Р последний остается в состоянии, соответствующем поступлению последнего импульса. При этом соответствующий ключ управления ШД остается открытым, тем самым фиксируя положение ОИ, необходимое для производства измерения ЛД.
Все электронные узлы, кроме источника питания и лазерного дальномера, расположены в корпусе (фиг.5) (28).
Органами управления являются: резистор R1 («Скорость») выполнен под шлиц, кнопка установки автоматического угла поворота «Установка» (на структурной схеме К1), кнопка запуска «Пуск» (на структурной схеме К2), кнопка управления дальномером «Замер» (на структурной схеме К3).
На внешнюю панель корпуса также выведен индикатор (29).
Работа с комплексом
Включаем источник питания, при этом питающие напряжения поступают на электронный блок и ЛД. Для активизации ЛД нажимаем кнопку К3. При этом происходит засветка дисплея ЛД и на выходе ЛД появляется луч лазера.
Для уточнения базы отсчета на опорный диск МПО устанавливаем прямоугольный эталон с плоскопараллельными гранями. Грань, обращенную к ЛД, совмещаем с центром оси вращения опорного диска и производим измерение.
Перед началом работы на ШУ устанавливаем ОИ и с помощью винтовых упоров производим его ориентацию относительно ЛД, включив последний на излучение лазера без измерения.
Устанавливаем ЛД по горизонтали и на высоту сканирования при помощи винтов вертикального перемещения.
Программируем ЛД на соответствующий режим измерений.
ЛД может быть запрограммирован на два режима измерений:
- режим последовательных измерений;
- режим непрерывных измерений.
Затем кнопкой К1 производим установку количества импульсов, соответствующее выбранному угловому шагу поворота ОИ, проконтролировав его по индикатору и таблице 1.
После всех подготовительных операций переходим к измерениям.
Для измерений в режиме последовательных измерений нажимаем кнопку К2. Время удержания кнопки К2 не влияет на работу МПО, влияет лишь количество нажатий (нажатие должно быть одно!). При этом ОИ совершает поворот на угол, соответствующий количеству импульсов, установленному кнопкой К1 в СИ2, и фиксируется в этом положении. Во время поворота ОИ мигает знак запятой на индикаторе, сигнализирующий о подаче импульсов на ШД. После прекращения вращения ОИ нажимаем кнопку К3 для включения ЛД на измерение расстояния до ОИ, считываем с табло ЛД результат и заносим его в соответствующую ячейку таблицы Excel компьютера.
Для следующих измерений повторяем нажатие на кнопку К2, затем на кнопку К3 и считываем результат измерения с табло ЛД, последовательно занося их в ячейки таблицы Excel компьютера.
Для снятия измерений в режиме непрерывных измерений устанавливаем ЛД в режим непрерывных измерений нажатием на кнопку КЗ и удержанием ее в течение нескольких секунд.
После перехода ЛД в выбранный режим нажатием кнопки К2 подаем сигнал для поворота ОИ на установленный угол и после очередного поворота ОИ считываем с табло ЛД показания измерений, занося их в ячейки таблицы Excel компьютера.
Для производства измерений кнопку К3 нажимать не следует, т.е. все операции по повороту и измерению производятся одной кнопкой К2. При этом время измерения ЛД увеличивается до 1…2 секунд и показания выводятся на табло непрерывно. Первое показание ЛД может быть неверным (от предыдущего измерения), поэтому следует считать несколько повторяющихся показаний.
Для локальных измерений (малых фрагментов ОИ) переводим ЛД в режим непрерывных измерений и, перемещая ЛД винтами горизонтального и вертикального перемещения УГВП, производим необходимые измерения, занося их в таблицу.
Расчет параметров ОИ и построение контуров сечений сканирования производится автоматически в таблицах Excel ПК, согласно введенным исследователем формул и выбранных диаграмм построения графиков зависимостей.
Пример такого расчета по измерениям и построение диаграммы представлены на фиг.6.
Угол поворота ОИ между измерениями составляет 9° (10 импульсов, установленных в СИ2, соответствующее показание индикатора - ⊏).
В графах таблицы 2 приведены: № - номер точки измерения, «Угол» - угол поворота ОИ в градусах, «Измерение» - расстояние от ОИ до базы, «Радиус» - расстояние от поверхности ОИ до оси его вращения.
Кроме того, приведен расчет расстояний между точками 28-33 и 9-13 на ОИ.
Все значения измерений приведены в мм.
Предлагаемое устройство позволяет выполнять краниометрические исследования черепов любой сохранности бесконтактным способом с фиксацией объекта максимально щадящим способом, получить обводные краниограммы в любой плоскости с возможностью сравнения полученных результатов с результатами исследований, проведенных с использованием традиционного механического оборудования. Кроме того, исключается погрешность, связанная с субъективным определением точек измерения при механическом способе снятия краниометрических параметров. Устройство позволяет получить размерные характеристики недоступных для механических приборов участков черепа: глазниц, крыловидно-небной ямки, наружного слухового прохода, а также получить размерные характеристики внутреннего основания черепа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНИОМЕТР | 2016 |
|
RU2632523C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЛОКАТОР | 2014 |
|
RU2562750C1 |
| ПРИЦЕЛ-ДАЛЬНОМЕР ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И ГРАНАТОМЕТОВ | 2013 |
|
RU2536186C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| ЛОКАЦИОННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ | 2017 |
|
RU2653158C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| УНИВЕРСАЛЬНАЯ УСТАНОВКА ДЛЯ ПРОВЕРКИ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2017 |
|
RU2678259C2 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ КРИВИЗНЫ ПОВЕРХНОСТИ СТРОИТЕЛЬНОЙ КОНСТРУКЦИИ | 2014 |
|
RU2559168C1 |





Устройство для измерения черепа относится к измерительным инструментам в области медицины и может быть использовано в анатомии, антропологии, судебной медицине, криминалистике для изучения черепа человека. Устройство содержит механизм автоматического поворота объекта, выполненный в виде опорного диска со сменными винтовыми упорами, имеющими возможность коррекции их высоты и положения относительно оси вращения, приводимый во вращение шаговым двигателем, блок управления шаговым двигателем, обеспечивающий автоматическую подачу предварительно установленного количества импульсов, соответствующего угловому шагу поворота объекта, лазерный дальномер, обеспечивающий измерение расстояния до поверхности объекта, механизм вертикального и горизонтального перемещения лазерного дальномера. Механизм поворота и ориентации с опорным диском и винтовыми упорами позволяет зафиксировать объект в необходимом положении, шаговый двигатель обеспечивает автоматический поворот объекта вокруг оси на 360° с определенным угловым шагом. Механизм вертикального и горизонтального перемещения лазерного дальномера дает возможность послойного сканирования поверхности объекта с заданным интервалом, а также проведение измерений в отдельных точках. 6 ил., 2 табл.
Устройство для измерения черепа, содержащее блок фиксации черепа и измерительный прибор, отличающееся тем, что дополнительно блок фиксации оснащен сменными винтовыми упорами с возможностью коррекции их высоты и расположения, механизмом вращения черепа вокруг вертикальной оси, блоком управления, позволяющего менять угол поворота черепа и лазерного дальномера, установленного на механизме поступательного вертикального и горизонтального перемещения.
| Портативный краниограф | 1987 |
|
SU1445693A1 |
| Приспособление к сварочной машине для перестановки стеклянных полу блоков с формующей машины | 1949 |
|
SU99948A1 |
| Приспособление для запирания стрелочных остряков | 1939 |
|
SU56150A1 |
| US 4592352 A, 03.06.1986. | |||

