Предлагаемое изобретение относится к оптико-электронному приборостроению, в частности к устройствам измерения угловых координат и дальности до выбранных объектов, и может быть использовано при создании оптико-электронных комплексов обнаружения и сопровождения воздушных целей, а также контроля зон взлета/посадки летательных аппаратов как в аэропортах, так и в полевых условиях.
При обзоре окружающего пространства проблемным является измерение дальности до объектов лазерными дальномерами (ЛД), имеющими очень малое поле зрения - единицы угловых минут, в то время как поле зрения устройств технического зрения, например теле- или тепловизионных оптико-электронных устройств, составляет единицы и даже десятки градусов. Сложность измерения дальности возрастает при работе по малоразмерным объектам (самолеты, вертолеты, беспилотные летательные аппараты), находящимся на больших расстояниях, когда требуется непрерывное сопровождение и наведение на них ЛД. При этом погрешность наведения на объекты должна быть менее угла расходимости лазерного излучения, который составляет приблизительно две угловые минуты.
Известны оптико-локационные устройства кругового обзора [В.Г. Архипов, Ю.В. Чжан, Оптический локатор кругового обзора, патент РФ №2352957 от 22.01.2007 г.; Ю.В. Чжан, Оптический локатор кругового обзора, патент РФ №2453866 от 27.05.2009 г.], в которых применены оптико-электронные блоки (ОЭБ) технического зрения и ЛД. Основной недостаток этих локаторов заключается в том, что наведение визирной оси ЛД на объект осуществляется поворотами зеркал по двум осям, при этом механические погрешности узлов поворота зеркал удваивают погрешность наведения, что существенно ужесточает требования к конструкции и увеличивает вероятность пропуска объекта. Погрешности карданных подвесов, в которых устанавливают зеркала для наведения визирной оси ОЭМ на объект, особенно в условиях переменных ветровых нагрузок, снижают точность измерения угловых координат объекта.
Известно применение оптических клиньев для сканирования [М.М. Мирошников «Теоретические основы оптико-электронных приборов», Ленинград, «Машиностроение», Ленинградское отделение, 1983, §6.2, стр. 104-106], компенсации сдвига изображения объекта на фоточувствительной поверхности фотоприемного устройства при сканировании [А.Я. Прилипко, Н.И. Павлов, Теплопеленгатор, патент РФ №2458356 от 15.04.2011 г.], наведения визирной оси дальномера на объект [Р.И. Волков и др., Способ оптической локации и устройство для его реализации, патент РФ №2554108 от 19.02.2014 г.; Р.И. Волков, М.И. Филатов, Оптико-электронный локатор, патент РФ №2562750 от 17.04.2014 г.].
Общим недостатком перечисленных устройств является сложность точного наведения визирной оси ЛД на объект и определение типа объекта при достаточно большом поле зрения оптико-электронного модуля, т.к. в этом случае объект, находящийся на большом расстоянии, изображается на экране монитора в виде точки.
Техническим результатом предлагаемого изобретения является повышение точности наведения визирной оси ЛД на объект, а также повышение надежности определения типа объекта на больших расстояниях до него.
Этот результат достигается тем, что, во-первых, фотоприемный канал ЛД снабжен телекамерой с длиннофокусным объективом и, соответственно, с меньшим полем зрения, что позволяет более точно наводить визирную ось ЛД на объект; во-вторых, предлагаемый модуль позволяет наблюдать изображения объекта с ОЭБ и ЛД одновременно либо на двух экранах рядом расположенных мониторов, либо на мониторе с функцией "картинка в картинке", что позволяет оперативно перенацеливать ЛД с одного объекта на другой в поле зрения оптико-электронного блока.
Выбор объекта осуществляет оператор с помощью устройства выбора объекта, например, наведением на него курсора в поле зрения ОЭБ с помощью джойстика, компьютерной "мыши" или другого подобного устройства. Вычислительный блок определяет вертикальные и горизонтальные координаты Хо и Yo выбранного объекта в координатной системе, связанной с полем зрения ОЭБ. По полученным значениям угловых координат Хо и Yo выбранного объекта вычислительный блок преобразует их в полярные координаты ρ и ϕ, по которым вычисляет углы поворота клиньев для наведения визирной оси ЛД на выбранный объект, а приводы клиньев поворачивают клинья на вычисленные углы. После завершения поворота оптических клиньев изображение выбранного объекта попадает на телекамеру фотоприемного канала и отображается на мониторе в зоне фотоприемного канала ЛД. Более точное совмещение визирной оси ЛД с объектом осуществляет оператор наведением перекрестия фотоприемного канала ЛД на изображение объекта в его поле зрения. Соответствующие датчики угла поворота отслеживают углы поворота клиньев.
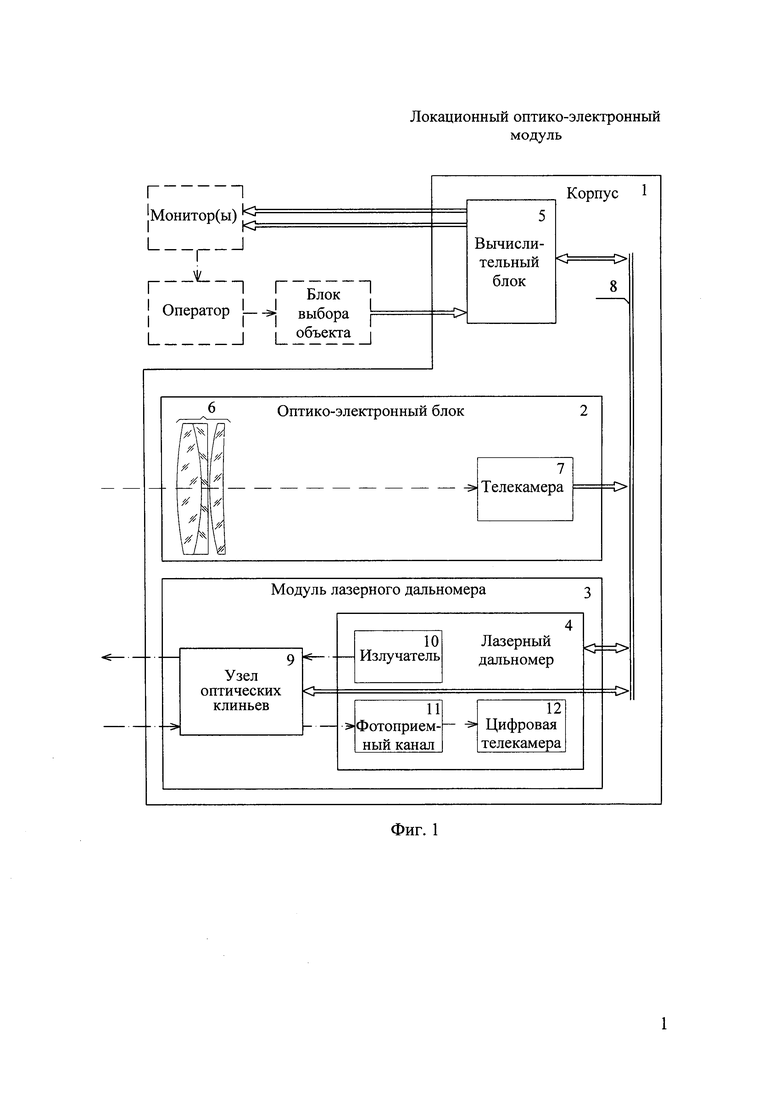
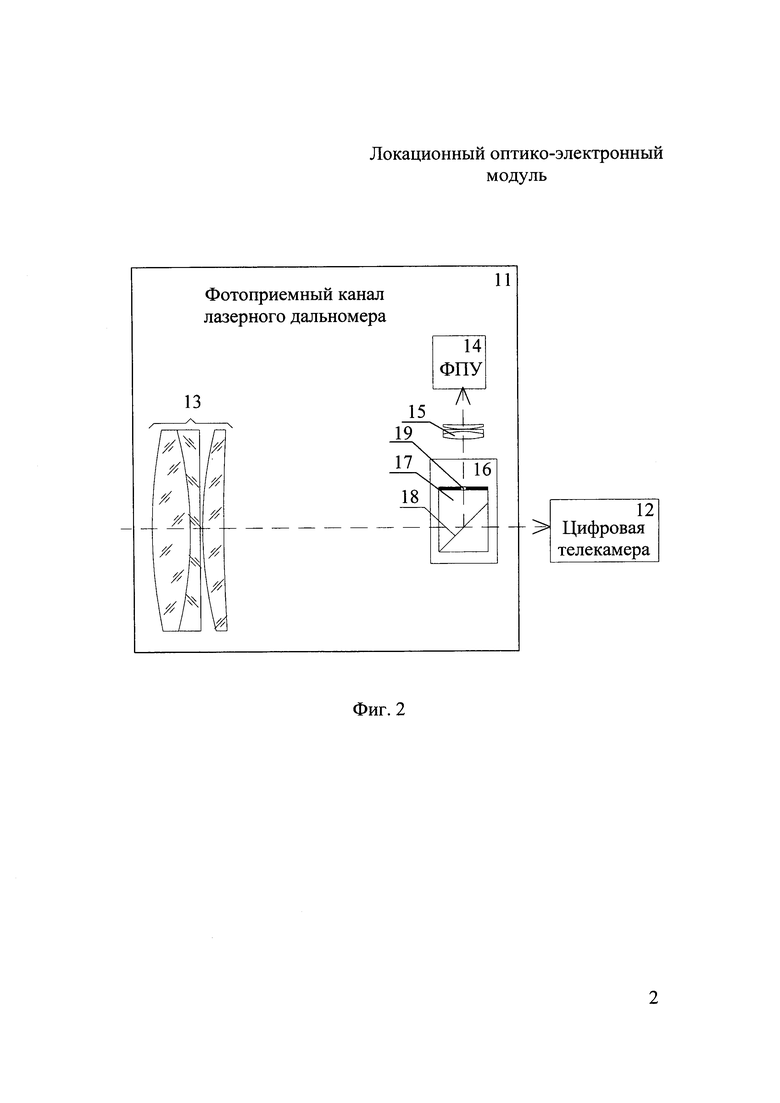
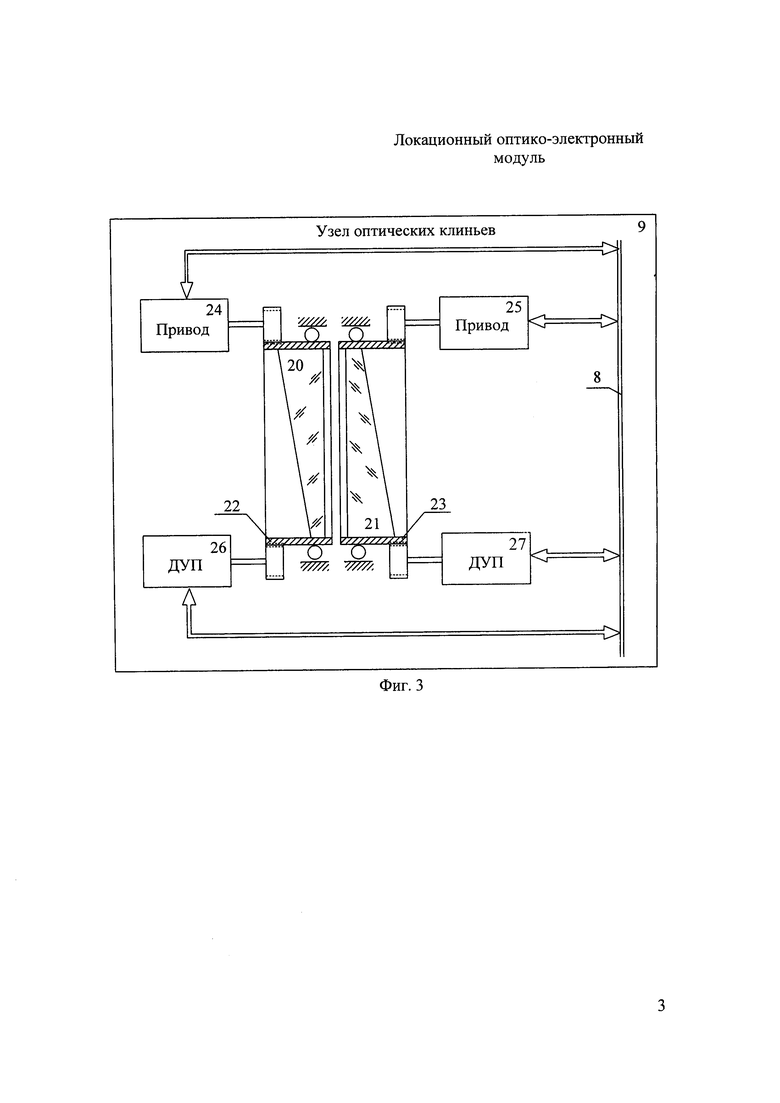
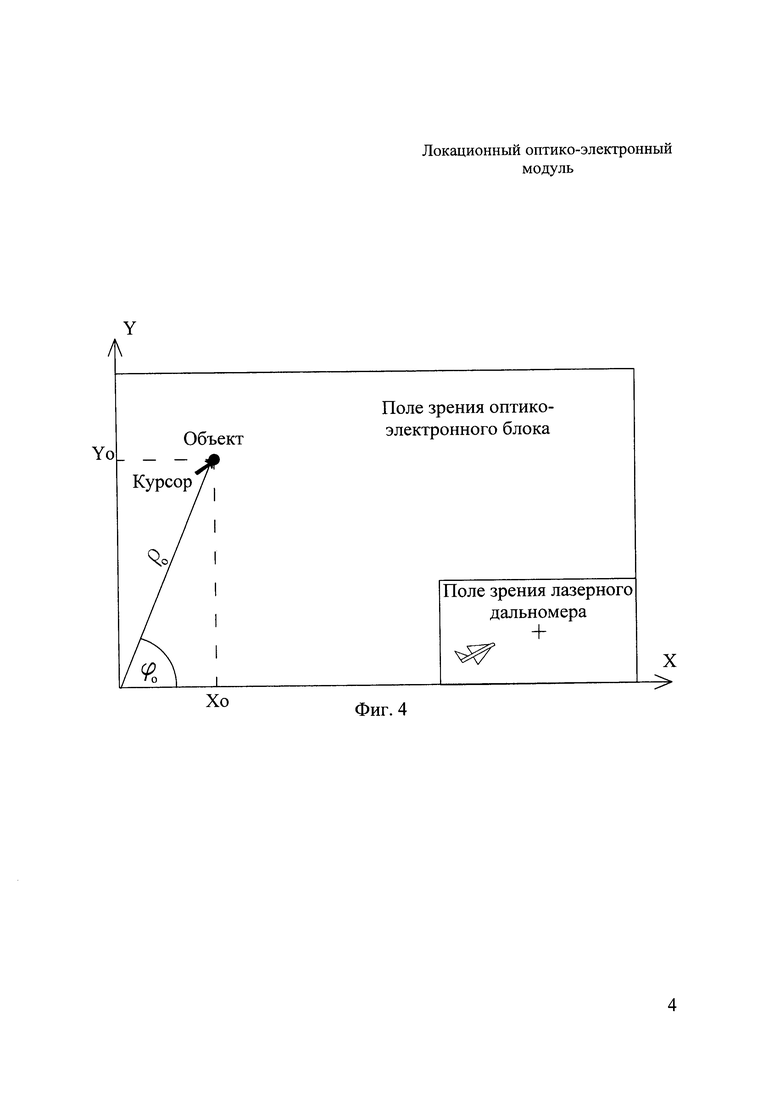
На фиг. 1 показана функциональная схема локационного оптико-электронного модуля (ЛОЭМ); на фиг. 2 приведена оптическая схема фотоприемного канала ЛД; на фиг. 3 показан пример выполнения узла оптических клиньев, на фиг. 4 приведен пример изображения объекта в двух зонах экрана монитора с функцией "картинка в картинке" и соответствующие этому положению координаты Хо, Yo и ρ, ϕ выбранного объекта. Приведенные на фиг. 1 монитор(ы) и устройство выбора объекта, а также оператор предназначены для описания работы модуля и не являются составными частями ЛОЭМ.
ЛОЭМ содержит корпус 1 (фиг. 1), в котором жестко закреплены ОЭБ 2 и модуль лазерного дальномера 3 с ЛД 4, а также вычислительный блок 5.
ОЭБ 2 содержит объектив 6, в фокальной плоскости которого расположена фоточувствительная поверхность цифровой телекамеры 7. Цифровая телекамера 7 через шину последовательного обмена 8 подключена к вычислительному блоку 5.
Модуль лазерного дальномера 3 содержит ЛД 4 и узел оптических клиньев 9.
ЛД 4 содержит излучатель 10, фотоприемный канал 11 и цифровую телекамеру 12. ЛД 4 через шину последовательного обмена 8 подключен к вычислительному блоку 5.
Фотоприемный канал 11 (фиг. 2) содержит входной объектив 13, общий для цифровой телекамеры 12 и фотоприемного устройства (ФПУ) 14, проекционный объектив 15 и спектроделитель 16.
Спектроделитель 16 выполнен в виде призмы 17 со спектроразделяющей поверхностью 18. На одной грани призмы 17 нанесена полевая диафрагма 19 фотоприемного канала 11 ЛД.
Узел оптических клиньев 9 (фиг. 3) содержит оптические клинья 20 и 21, каждый клин закреплен в своей поворотной обойме 22 и 23, каждая из которых снабжена приводами 24, 25 и датчиками угла поворота 26, 27 соответственно. Входы/выходы приводов 24, 25 и датчиков угла поворота 26, 27 подключены через шину последовательного обмена 8 к вычислительному блоку 5.
В начальном положении вершины клиньев 20, 21 развернуты в противоположные стороны. При этом визирная ось модуля ЛД 3 совпадает с оптической осью ЛД 4 и находится в начале координат, связанных с полями зрения ОЭБ 2 и модуля лазерного дальномера 3.
ЛОЭМ работает следующим образом.
Оператор просматривает видеоизображение зоны обзора на экране монитора (фиг. 4), с помощью устройства выбора объекта (например, джойстика или компьютерной «мыши») наводит курсор на изображение выбранного объекта и дает команду на определение угловых координат объекта и дальности до него. По этой команде вычислительный блок 5 определяет горизонтальную Хо и вертикальную Yo координаты объекта относительно начала координат поля зрения ОЭБ 2.
Вычислительный блок 5 преобразует декартовы координаты Хо и Yo в полярные координаты ρo и ϕo, по которым вычисляет соответствующие углы поворота клиньев и подает значения этих углов на приводы 24 и 25. Углы поворота обойм 22 и 23 контролируются ДУП 26 и ДУП 27.
После выполнения операции поворота визирной оси ЛД оператор через вычислительный блок 5 выдает ЛД 4 команду на замер дальности. Точность наведения визирной оси ЛД 4 на объект оператор наблюдает по положению изображения объекта в поле зрения цифровой телекамеры 12 и, при необходимости, корректирует это положение с помощью устройства выбора объекта.
Измеренные значения дальности до объекта и координаты Хо и Yo заносят в память вычислительного блока 5, которые могут быть вызваны внешними устройствами через шину последовательного обмена 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ЛОКАТОР | 2014 |
|
RU2562750C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| ДАЛЬНОМЕРНО-ВИЗИРНЫЙ ПРИБОРНЫЙ КОМПЛЕКС | 2010 |
|
RU2437051C1 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| СПОСОБ ВЫВЕРКИ ПАРАЛЛЕЛЬНОСТИ ВИЗИРНЫХ ОСЕЙ МУЛЬТИСПЕКТРАЛЬНЫХ КОМПЛЕКСОВ | 2010 |
|
RU2443988C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ И ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2549552C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
Изобретение относится к оптико-электронному приборостроению, в частности к устройствам измерения угловых координат и дальности до выбранных объектов, и может быть использовано при создании оптико-электронных комплексов обнаружения и сопровождения воздушных целей, а также контроля зон взлета/посадки летательных аппаратов как в аэропортах, так и в полевых условиях. Заявленный локационный оптико-электронный модуль содержит оптико-электронный блок с объективом и телекамерой, лазерный дальномер с излучателем и фотоприемным блоком, механически жестко соединенный с оптико-электронным блоком, узел оптических клиньев с приводами и датчиками углового положения, вычислительное устройство, соединенное своими входами/выходами через шину последовательного обмена с входами/выходами телекамеры, лазерного дальномера, приводов и датчиков углового положения. В фотоприемный блок лазерного дальномера введена цифровая телекамера, подключенная к вычислительному устройству. Объектив фотоприемного блока лазерного дальномера выполнен общим для фотоприемного устройства лазерного дальномера и цифровой телекамеры. Технический результат - повышение точности наведения визирной оси ЛД на объект, а также повышение надежности определения типа объекта на больших расстояниях до него. 4 ил.
Локационный оптико-электронный модуль, содержащий оптико-электронный блок с объективом и телекамерой, лазерный дальномер с излучателем и фотоприемным блоком, механически жестко соединенный с оптико-электронным блоком, узел оптических клиньев с приводами и датчиками углового положения, вычислительное устройство, соединенное своими входами/выходами через шину последовательного обмена с входами/выходами телекамеры, лазерного дальномера, приводов и датчиков углового положения, отличающийся тем, что в фотоприемный блок лазерного дальномера введена цифровая телекамера, подключенная к вычислительному устройству, причем объектив фотоприемного блока лазерного дальномера выполнен общим для фотоприемного устройства лазерного дальномера и цифровой телекамеры.
| ОПТИКО-ЭЛЕКТРОННЫЙ ЛОКАТОР | 2014 |
|
RU2562750C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| US 20090168045 A1, 20.07.2009 | |||
| RU 159107 U1, 27.01.2016 | |||
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| JP 2007187581 A, 26.07.2007. | |||

