Изобретение относится к строительному производству, а именно к способам измерительного контроля качества поверхности строительных конструкций.
Известен способ определения кривизны поверхности строительных конструкций с помощью индивидуально изготовленных лекал для каждого типа поверхности (Никитин В.М. и др. Руководство по контролю качества строительно-монтажных работ: руководство / Общерос. Обществ. фонд. Центр качества стр-ва, С.-Петерб. отд-ние; 7-е изд., испр. и доп. - СПб., 2007, с. 257).
Известен способ определения кривизны поверхности объекта с помощью лазерного электронного тахеометра (Соколова Т.Н., Рудская Л.А., Соколов А.Л. Архитектурные обмеры: Учебное пособие. - М.: Архитектура-С, 2008, 112 с., ил., с. 22).
Наиболее близким по технической сущности является способ бесконтактного определения кривизны длинномерного объекта. Способ определения кривизны длинномерных объектов предназначен для использования при измерении кривизны на базовом расстоянии, как правило, не более 1 м и максимальной кривизны на всей длине объекта. Основой измерений являются датчики расстояния до объекта и датчик скорости, закрепленные на неподвижном основании. В качестве датчиков могут применяться датчики различного типа: оптические, индуктивные, емкостные, лазерные и т.п. Показания датчиков поступают в блок анализа и обработки информации, в котором и производится последующий расчет. Условие измерений - прямолинейное движение объекта. Могут присутствовать отклонения при движении в виде поперечных смещений и вибрации (патент RU №2439487, G01B 11/00, В61К 9/08, опубл. 10.01.2012).
Способ имеет следующие недостатки:
невозможно применение способа при определении кривизны поверхностей неподвижных и пространственных строительных конструкций;
необходимо применение датчика скорости;
размеры одновременно исследуемого участка поверхности не могут превышать расстояние между датчиками расстояния;
измерение кривизны возможно только в плоскости расположения датчиков.
Задача изобретения - усовершенствование способа измерительного контроля качества поверхности строительных конструкций.
Сущность изобретения заключается в том, способ бесконтактного определения кривизны поверхности строительной конструкции, включающий синхронное измерение с помощью системы закрепленных на общем основании датчиков расстояния, расположенных относительно друг друга под неизменяемым углом, расстояний от каждого из датчиков до своей контрольной точки на пересечении оси датчика с поверхностью конструкции, и передачу полученных данных в блок анализа и обработки информации, в котором производится расчет кривизны, при этом одновременно поверхность конструкции остается неподвижной, измерение расстояний осуществляют с помощью переносной системы из трех наклонных и одного высотного лазерных дальномеров, равноудаленных от вершины условной правильной треугольной пирамиды и направленных при измерении в сторону поверхности конструкции таким образом, чтобы оси наклонных дальномеров совпадали с боковыми ребрами, имеющими угол наклона 55-85°, а ось высотного дальномера - с высотой этой пирамиды, все углы основания которой своими вершинами совмещены с поверхностью конструкции.
При определении кривизны несферической поверхности определяют главные ее кривизны, располагая контрольные точки двух наклонных дальномеров на главных направлениях поверхности.
Технический результат заключается в создании способа, позволяющего бесконтактно с помощью переносной системы датчиков расстояния определять кривизну поверхности неподвижных объектов, в том числе крупногабаритных строительных конструкций, с расстояния более 1 м.
Сущность изобретения поясняется чертежами, где на
фиг. 1 показано расположение дальномеров относительно криволинейной поверхности,
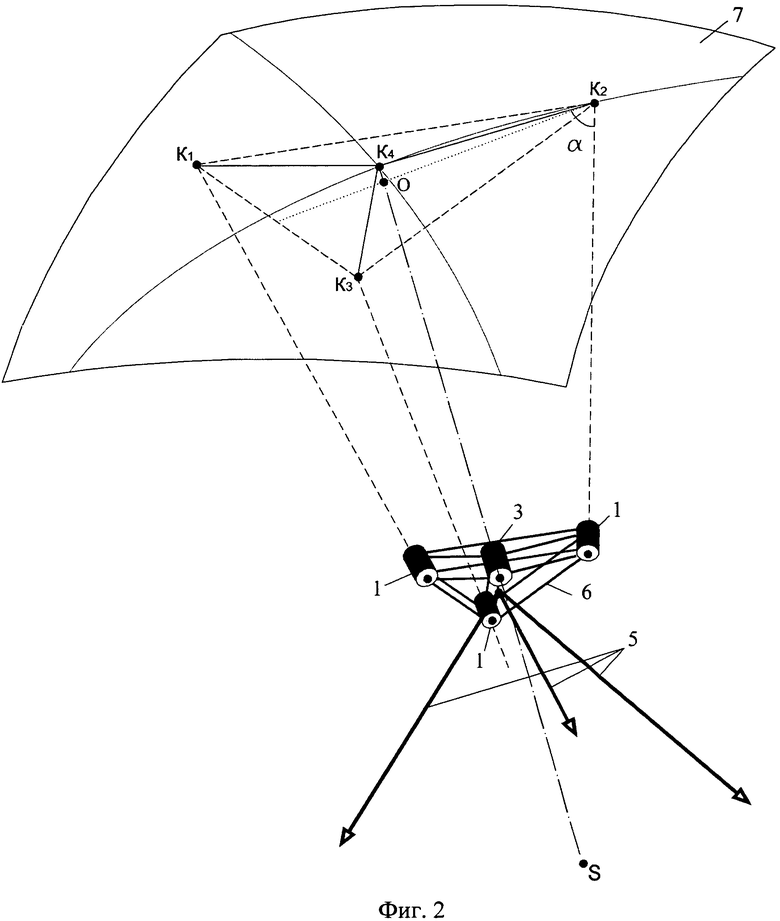
фиг. 2 - схема расположения системы дальномеров при измерении кривизны потолочной поверхности купольного (сферического) железобетонного свода,
фиг. 3 - схема расположения системы дальномеров при измерении кривизны потолочной поверхности цилиндрического железобетонного свода.
Измерение кривизны осуществляют с помощью системы из трех наклонных лазерных дальномеров 1, оси которых совмещены с ребрами условной правильной треугольной пирамиды 2, угол α наклона которых к ее основанию составляет 55-85°, и одного высотного лазерного дальномера 3 с осью, расположенной на высоте пирамиды 2. Все дальномеры равноудалены от вершины S пирамиды 2, расположены в точках D1, D2, D1 и D4 и направлены в сторону поверхности конструкции 4. В местах пересечения с поверхностью конструкции 4 осей крайних дальномеров 1 находятся их контрольные точки K1, К2 и К3, а с осью высотного дальномера - контрольная точка высотного дальномера К4. Контрольные точки K1-К3 одновременно принадлежат основанию К1К2К3 пирамиды 2 с точкой О в его центре и на оси высотного дальномера. Систему лазерных дальномеров 1, например, устанавливают шарнирно на треноге 5 и жестко закрепляют на стальном каркасе 6 их общего основания в форме усеченной правильной треугольной пирамиды. Система направляется в сторону поверхности цилиндрического свода 7 или сферического 8.
Поверхность конструкции 4 при измерении остается неподвижной, так как система датчиков расстояния переносная и ее можно свободно перемещать относительно поверхности конструкции перед измерениями расстояний.
Функцию датчиков расстояния выполняют лазерные дальномеры, обладающие сочетанием таких ценных качеств, как высокая точность измерений, достаточная дальность действия, автономность, безопасность и простота применения, компактность и легкость, ценовая доступность.
В систему лазерных дальномеров входят три наклонных дальномера 1 и один высотный дальномер 3. Все дальномеры направлены в сторону исследуемой поверхности 4 для возможности определения расстояния D1K1, D2K2, D3K3 и D4K4 до контрольных точек на ней К1, К2, К3 и К4.
Целесообразность совмещения осей наклонных дальномеров 1 с ребрами условной правильной треугольной пирамиды 2 объясняется следующим:
высота правильной пирамиды 2 всегда проходит через середину ее основания О;
у треугольной пирамиды минимальное количество боковых ребер, поэтому требуется наименьшее количество наклонных дальномеров;
только у треугольной пирамиды возможно одновременное совмещение вершин всех углов основания с любой криволинейной поверхностью;
упрощается наведение системы дальномеров на исследуемый участок поверхности 4 и вычисление ее кривизны;
обеспечивается возможность регулирования размеров исследуемого участка простым приближением системы дальномеров к поверхности или отдалением от нее.
Совмещение оси высотного дальномера 3 с высотой условной правильной треугольной пирамиды 2 необходимо для определения кратчайшего расстояния K4O от его контрольной точки К4 до основания пирамиды и вычисления кривизны поверхности конструкции.
Все дальномеры равноудалены от вершины этой пирамиды S для того, чтобы уменьшить габариты их системы и обеспечить при равенстве расстояний D1K1=D2K2=D3K3 от наклонных дальномеров 1 до их контрольных точек K1, К2 и К3 совмещение вершин всех углов основания пирамиды 2 с поверхностью конструкции 4.
При указанном расположении дальномеров по четырем их контрольным точкам на поверхности конструкции K1, К2, К3 и K4 можно построить правильную треугольную пирамиду, по длине ребра (например, K1K4) и высоте К4О которой можно определить среднюю кривизну поверхности.
Если необходимо определить кривизну несферической поверхности, то целесообразно сначала определить главные кривизны поверхности. Для этого систему дальномеров поворачивают относительно оси высотного дальномера так, чтобы контрольные точки двух наклонных дальномеров расположилась сначала на одном, а затем на другом главном направлении поверхности, которые перпендикулярны друг другу.
При угле наклона граней пирамиды (и осей наклонных дальномеров) к ее основанию более 85° размеры исследуемого участка поверхности 4 настолько малы, что способ становится малопроизводительным, а для применения в небольших помещениях зданий - непригодным. При угле наклона ребра менее 55° снижается точность измерения способа, и его невозможно применять при исследовании небольших участков поверхности 4 с расстояния более 10 м.
Предлагаемый способ может быть осуществлен следующим образом.
При определении кривизны сферической поверхности железобетонного купольного свода в помещении здания на треноге 5 шарнирно устанавливают систему лазерных дальномеров марки HELTI PD 40 с лазерным указателем, жестко закрепленных на стальном каркасе 6 их общего основания в форме усеченной правильной треугольной пирамиды. К боковым ребрам этого каркаса, располагаемых под углом 20° к высоте (или 70° к основанию), жестко прикреплены три наклонных дальномера 1, а внутри каркаса - высотный дальномер 3. Причем оси дальномеров сходятся в одной точке S на расстоянии 0,6 м от дальномеров с тыльной стороны системы. До начала измерений систему направляют в сторону поверхности свода 7 и находят участок свода, на котором все три контрольные точки K1, К2 и К3 оказываются равноудаленными от своих наклонных дальномеров 1. В таком положении ось высотного дальномера 3 практически совпадает с нормалью к поверхности в его контрольной точке К4. После этого производится измерение расстояния от высотного дальномера 3 до его контрольной точки К4.
Таким образом, четыре контрольные точки образуют вторую условную правильную треугольную призму K1K2K3K4, вписанную в сферу свода. Определить радиус этой сферы R можно по формуле:
 ,
,
где K1K4 - длина ребра второй условной правильной треугольной пирамиды, так как K1K4=K2K4=К3К4; K4O - высота второй условной правильной треугольной пирамиды.
Поскольку кривизна k поверхности является обратной величиной ее радиуса, она определяется по формуле:

При применении предлагаемого способа при определении кривизны цилиндрического железобетонного свода следует учитывать, что эта поверхность несферическая линейчатая, у которой необходимо определять значение только одной главной кривизны, равной обратной величине радиуса цилиндрической поверхности, поскольку в продольном направлении (вдоль образующей) вторая главная кривизна равна нулю. Поэтому особенностью определения радиуса цилиндрической поверхности является необходимость расположения системы дальномеров в пространстве, таким образом, чтобы две контрольные точки наклонных дальномеров (например K1 и К2) находились на образующей цилиндрической поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРАВКИ КРУГЛОГО ПРОКАТА | 2001 |
|
RU2188092C1 |
| ЖЕЛЕЗОБЕТОННОЕ ХРАНИЛИЩЕ РАДИОАКТИВНЫХ ОТХОДОВ | 1999 |
|
RU2168224C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОБЪЕМА ДВИЖУЩЕГОСЯ ГРУЗА, ИМЕЮЩЕГО СЛОЖНУЮ ГЕОМЕТРИЧЕСКУЮ ФОРМУ | 2020 |
|
RU2734085C1 |
| СПОСОБ КОНТРОЛЯ СМЕЩЕНИЯ ТОЧКИ КОНТАКТА ОТНОСИТЕЛЬНО НОМИНАЛЬНОГО ПОЛОЖЕНИЯ НА ДОРОЖКЕ КАЧЕНИЯ КОЛЕЦ ДВУХРЯДНЫХ И ОДНОРЯДНЫХ РАДИАЛЬНО-УПОРНЫХ ШАРИКОПОДШИПНИКОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1999 |
|
RU2187785C2 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СПОСОБ ПОСТРОЕНИЯ ШАБЛОНА БРЮК | 2001 |
|
RU2208372C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ОЧИСТКИ ВОДЫ С НЕПРЕРЫВНЫМ КОНТРОЛЕМ ЕЕ КАЧЕСТВА В РАЗЛИЧНЫХ ТОЧКАХ ТЕХНОЛОГИЧЕСКОЙ СХЕМЫ | 2011 |
|
RU2472717C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧЕРЕПА | 2011 |
|
RU2456915C1 |
| Всенаправленный приёмник-преобразователь лазерного излучения (2 варианта) | 2016 |
|
RU2630190C1 |
| Каркасный модуль здания | 2019 |
|
RU2725356C1 |

Изобретение относится к способам измерительного контроля качества поверхности строительных конструкций. Способ бесконтактного определения кривизны поверхности строительной конструкции включает синхронное измерение с помощью системы закрепленных на общем основании датчиков расстояния, расположенных относительно друг друга под неизменяемым углом, расстояний от каждого из датчиков до своей контрольной точки на пересечении оси датчика с поверхностью конструкции, и передачу полученных данных в блок анализа и обработки информации, в котором производится расчет кривизны. При этом одновременно поверхность конструкции остается неподвижной. Измерение расстояний осуществляют переносной системой из трех наклонных и одного высотного лазерных дальномеров, равноудаленных от вершины воображаемой правильной треугольной пирамиды и направленных при измерении в сторону поверхности конструкции таким образом, чтобы оси наклонных дальномеров совпадали с боковыми ребрами, имеющими угол наклона 55-85°, а ось высотного дальномера - с высотой этой пирамиды, все углы основания которой своими вершинами совмещены с поверхностью конструкции. Технический результат - бесконтактное определение кривизны поверхности неподвижных объектов с расстояния более 1 м. 1 з.п. ф-лы, 3 ил.
1. Способ бесконтактного определения кривизны поверхности строительной конструкции, включающий синхронное измерение с помощью системы закрепленных на общем основании датчиков расстояния, расположенных относительно друг друга под неизменяемым углом, расстояний от каждого из датчиков до своей контрольной точки на пересечении оси датчика с поверхностью конструкции, и передачу полученных данных в блок анализа и обработки информации, в котором производится расчет кривизны, отличающийся тем, что одновременно поверхность конструкции остается неподвижной, измерение расстояний осуществляют с помощью переносной системы из трех наклонных и одного высотного лазерных дальномеров, равноудаленных от вершины условной правильной треугольной пирамиды и направленных при измерении в сторону поверхности конструкции таким образом, чтобы оси наклонных дальномеров совпадали с боковыми ребрами, имеющими угол наклона 55-85°, а ось высотного дальномера - с высотой этой пирамиды, все углы основания которой своими вершинами совмещены с поверхностью конструкции.
2. Способ по п. 1, отличающийся тем, что при определении кривизны несферической поверхности определяют главные ее кривизны, располагая контрольные точки двух наклонных дальномеров на главных направлениях поверхности.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ИЗДЕЛИЯ | 2010 |
|
RU2500984C2 |
| Регулятор подачи долота на забой | 1950 |
|
SU100229A1 |
| 0 |
|
SU116224A1 | |
| Устройство для изготовления армокаркасов негабаритных напорных водоводов | 1980 |
|
SU895577A1 |

