Изобретение относится к способу осуществления переключения передач автоматизированной коробки передач транспортного средства во время движения с использованием или без использования разделительного сцепления согласно ограничительной части независимого пункта формулы изобретения.
Автоматизированные коробки передач уже давно используются в транспортных средствах различных типов. Они имеют множество несколько жестко заданных передаточных соотношений, которые являются переключаемыми путем предписываемого водителем и/или устройством управления коробкой передач выбора в силовой поток между двигателем и приводимыми в движение колесами транспортного средства. Между двигателем транспортного средства и автоматизированной коробкой передач расположено разделительное сцепление или же муфта сцепления, которое/-ая позволяет, например, включать передачу при работающем двигателе и неподвижном транспортном средстве. Зачастую, это разделительное сцепление также может быть приведено в действие автоматизированным способом и позволяет таким образом осуществить полностью автоматизированные или же полуавтоматизированные процессы переключения передач.
Автоматизированные коробки передач могут быть выполнены в виде синхронизированных коробок передач. При таком исполнении посредством специальных элементов коробки передач обеспечивается, что при включении передачи используемые с геометрическим замыканием элементы коробки передач перемещаются с незначительной, часто желаемой разницей в скорости или без нее. В данном конструктивном исполнении синхронизация обеспечивается при помощи фрикционных муфт внутри коробки передач.
Однако расположенное в самой коробке передач устройство синхронизации из-за большого числа различных фрикционных пар для различных передаточных чисел коробки передач связано с принципиальными недостатками в отношении вызванных дополнительными элементами затрат, дополнительно необходимого конструктивного пространства, которое обусловлено использованием дополнительных элементов с большим весом, и не в последнюю очередь - в отношении срока службы коробки передач без проведения, по возможности, технического обслуживания. Поскольку фрикционные муфты подвержены существенному износу, то по истечении заданного срока использования по меньшей мере на транспортных средствах с большим пробегом или же частыми процессами переключения передач они подлежат замене, что влечет за собой увеличение затрат из-за их расположения в коробке передач и временных издержек в течение пребывания транспортного средства в мастерской.
Поэтому прежде всего на транспортных средствах, которые обычно используются профессионально и имеют большой ежегодный пробег и/или большое число переключения передач, несинхронизированные механические коробки передач имеют преимущества. Они, как правило, выполнены в виде коробок передач с кулачковыми муфтами, в которых переключаемые в силовом потоке между приводным двигателем и приводимыми колесами передаточные соотношения в каждом случае задаются путем перемещения элемента с геометрическим замыканием. Как правило, в коробке передач такого типа зубчатые шестерни одного вала жестко закреплены на нем, в то время как входящие с ними в зацепление зубчатые шестерни по меньшей мере еще одного вала аксиально закреплены как так называемые свободные шестерни, однако установлены на валу с возможностью радиального вращения. Эти свободные шестерни могут быть жестко зафиксированы на своем валу кулачковыми муфтами включения, посредством чего становится возможным силовой поток от расположенной на первом валу жестко закрепленной шестерни через свободную шестерню, зафиксированную кулачковой муфтой включения на втором валу.
Переключение кулачковых муфт включения с приемлемой нагрузкой на конструктивные узлы и без шумообразования или же только с незначительным шумообразованием возможно только в том случае, если подлежащая фиксации на своем валу свободная шестерня и соответствующий вал имеют в каждом случае в значительной мере одинаковую частоту вращения. Поскольку частота вращения вторичного вала коробки передач определяется на основании скорости движения транспортного средства и расположенных между приводимыми в движение колесами и первичным валом коробки передач, в целом жестко заданных передаточных соотношений, то при переключении передачи несинхронизированной коробки передач на движущемся транспортном средстве частота вращения приводного вала коробки передач должна быть отрегулирована так, чтобы она в значительной мере соответствовала частоте вращения, которая устанавливается после замыкания кулачковой муфты включения.
Для этого, в первую очередь, можно простыми средствами подать на двигатель при находящейся в нейтральном положении коробке передач и разомкнутом разделительном сцеплении сигналы управления или отрегулировать его частоту вращения так, что в зависимости от необходимого ускорения или замедления первичного вала коробки передач частота вращения двигателя будет устанавливаться лишь на большую или меньшую частоту вращения, чем необходимая для синхронизации частота вращения. Если теперь разделительное сцепление медленно замыкается, то приводной вал коробки передач получает соответствующее ускорение или замедление. Поскольку отклонение от необходимой частоты вращения синхронизации достаточно мало, связанные с геометрическим замыканием элементы входят в зацепление для фиксации свободных шестерен, и включается нужная передача.
Преимуществом данного метода является то, что из-за возможного в разделительном сцеплении большого проскальзывания даже при очень большой разнице в частоте вращения между вторичным валом двигателя и фактической или же необходимой частотой вращения приводного вала коробки передач он работает без перебоев.
Однако именно при частых процессах переключения и на транспортных средствах со значительной массой нельзя пренебрегать обусловленным этим износом разделительного сцепления, что, в свою очередь, влечет за собой затраты на замену фрикционных накладок, а также затраты из-за простоя транспортного средства, обусловленные необходимым пребыванием транспортного средства в мастерской. Кроме того, наряду с фрикционными накладками сцепления нагрузка оказывается также на соответствующие актуаторы и выжимной подшипник сцепления, а следовательно, они также подвержены износу.
На основании этого уже разработаны концепции, позволяющие переключать передачи на несинхронизированной коробке передач во время движения транспортного средства при замкнутом разделительном сцеплении. Для этого необходимо при заданной посредством скорости движения транспортного средства частоте вращения вторичного вала коробки передач относительно точно установить частоту вращения приводного вала коробки передач или же частоту вращения жестко соединенного с ним посредством замкнутого разделительного сцепления вторичного вала двигателя на необходимую для синхронизации частоту вращения.
Это требует, если эта синхронизация должна осуществляться при помощи частоты вращения двигателя в течение приемлемого промежутка времени, сравнительно сложного и точного управления двигателем. При этом устанавливаемая частота вращения зависит, прежде всего, от приложенной к поршню двигателя мощности, которая, в свою очередь, зависит от таких разнообразных факторов, как количество впрыскиваемого топлива, соотношение воздух-топливо, угол опережения зажигания, а также от индивидуальных и различных даже в рамках одной серии двигателей характеристик двигателя, а также от других факторов.
Для определения имеющейся для привода первичного вала коробки передач мощности двигателя необходимо уменьшить прилагаемую к поршню мощность двигателя, например, на внутренние потери на трение, которые, в свою очередь, не только зависят от соответствующей степени износа компонентов двигателя и коробки передач, но и изменяются в течение короткого времени, например, с температурой и, тем самым, вязкостью трансмиссионного и моторного масла.
Также следует учитывать, что регулировка скорости синхронизации выполняется при выключенной передаче, то есть при нахождении коробки передач в нейтральном положении. В силу очень крутой характеристики кривой мощность-крутящий момент двигателя в этом рабочем состоянии даже небольшие изменения приводной мощности или противодействующих приводной мощности моментов торможения приводят к значительным различиям в частоте вращения, поэтому, например, изменение отбора мощности генератором или климатической установкой может оказать существенное краткосрочное обратное воздействие на получаемую кривую частоты вращения. Тем не менее, с этим диапазоном регулирования со стороны приводного двигателя во многих случаях удовлетворительно справляется блок управления двигателя.
Кроме того, установка частоты вращения синхронизации является высокодинамичным процессом, в котором не последнюю роль играет также и инерция подлежащих торможению или ускорению масс. Однако в то время как подлежащие ускорению или торможению массы относительно точно известны и изменяются, в общем, лишь медленно, например, с увеличением износа накладок разделительного сцепления, следует также учитывать, что частота вращения синхронизации во время процесса переключения передач также может изменяться и со стороны первичного вала коробки передач. Как только тяговое усилие двигателя не может больше передаваться на приводимые в движение колеса, так как в коробке передач выключена предварительно включенная передача и поэтому коробка передач находится в нейтральном положении, скорость транспортного средства изменяется в соответствии с прилагаемыми силами, которые зависят, например, от наклона опорной поверхности транспортного средства и от массы транспортного средства, от обусловленного компонентами транспортного средства и ровностью дорожного полотна сопротивления качению, сопротивления воздуха и скорости, а также от направления выходящего воздуха и от других факторов. Этот диапазон соответственно не может быть отрегулирован блоком управления двигателя, и поэтому его необходимо регистрировать отдельно и передавать в блок управления двигателя как необходимую в данный момент или же в ближайшем будущем частоту вращения синхронизации.
Для принятия решения, должно ли переключение передачи быть проведено без размыкания разделительного сцепления, и для достаточно точной установки частоты вращения, в конечном счете, необходимо оценивать сочетание этих и других воздействующих факторов. При этом не следует забывать о том, что достигаемые при процессе переключения без размыкания разделительного сцепления преимущества существенным образом основываются на снижении износа.
Хотя в самом простом случае достаточно определить необходимую частоту вращения синхронизации приводного вала коробки передач при помощи достаточно просто определяемой с помощью измерительной техники частоты вращения вторичного вала коробки передач и известного за счет целевой передачи передаточного соотношения и оказать влияние при помощи контура регулирования вторичного вала приводного двигателя путем изменения его мощности в нужном направлении. Однако такой подход часто приводит при сильно колеблющихся условиях эксплуатации транспортного средства к несоразмерно длительному времени переключения или к нежелательно неточно установленной частоте вращения синхронизации.
В заключение следует обратить внимание, что существуют процессы переключения, которые часто не могут быть осуществлены или которые в любом случае не могут быть осуществлены предпочтительно без размыкания разделительного сцепления. К ним относятся не только процессы трогания с места, но также и, например, процессы переключения, которые, например, потребовали бы частоты вращения приводного двигателя ниже стандартной частоты вращения холостого хода или даже ниже возможной частоты вращения холостого хода. Подобный процесс переключения может потребоваться, например, если транспортное средство движется под гору, или водитель желает получить только незначительное воздействие торможения двигателем или в ожидании ускорения транспортного средства на наклонных поверхностях хотел бы выбрать передачу, которая хотя на короткое время и привела бы к работе двигателя на нижней границе частоты вращения или даже ниже нее, но из-за ускорения транспортного средства в течение нескольких секунд будет приемлемой передачей для движения.
Из DE 10249951 A1 уже известен способ управления трансмиссией, в котором переключение передач можно осуществлять без размыкания разделительного сцепления с помощью учета многообразия различных факторов влияния. Для этого при каждом переключении передач принимается решение о том, должно ли переключение передач производиться с замкнутым или разомкнутым сцеплением. Если в результате проверки выясняется, что переключение передач может быть произведено с замкнутым сцеплением, то переключение передач и производится с замкнутым сцеплением.
Для этого предлагается проводить выбор и/или проверку типа переключения передач в зависимости от многообразия параметров транспортного средства и рабочих показателей. Подчеркивается, что опасность того, что выбор типа переключения передач приведет к неправильному результату, при использовании такого способа является особенно малой. Это достигается, с одной стороны, за счет очень сложного и затратного в отношении как необходимой расчетной мощности электронного блока управления коробкой передач, так и необходимых датчиков порядка действий, а с другой стороны, за счет того, что переключение передач с замкнутым сцеплением производится только тогда, если способ определения с высокой степенью надежности предсказал возможность беспроблемного переключения.
Например, согласно основному варианту представленного в DE 10246951 A1 способа от переключения при замкнутом сцеплении отказываются в том случае, если один из используемых компонентов или его датчиков работают неправильно. На основании явно большого числа учитываемых факторов и компонентов на практике это означает существенное ограничение усредненной доступности системы. Кроме того, после первого запуска транспортного средства и после нового запуска сначала должны действовать крайне ограничительные правила для разрешения процесса переключения при замкнутом сцеплении, чтобы таким образом скомпенсировать неопределенность в отношении еще недостаточно точно известных фактических и критических воздействующих параметров.
Защита от ошибочного разрешения процесса переключения при замкнутом сцеплении в существенной мере увеличивается за счет того, что при определении даже незначительных неопределенностей в отношении возможности проведения производится переключение в режим переключения с разомкнутым сцеплением.
Таким образом, преимущества переключения при замкнутом сцеплении во многих случаях, в которых их можно было бы использовать на практике, не могут быть реализованы по причинам, которые необходимо учитывать в данном известном способе. При этом важно также, что решение о режиме переключения передач (при разомкнутом сцеплении или при замкнутом сцеплении) всегда принимается перед непосредственным проведением процесса переключения.
Однако представленный способ по меньшей мере в некоторых случаях не может обеспечить требуемую достаточную надежность решения по режиму переключения. Так, например, именно для грузовых транспортных средств следует учитывать очень сильное ежедневное изменение загрузки, а вместе с тем и общей массы транспортного средства, в результате чего после нового запуска приводного двигателя сначала происходит отказ от переключения с замкнутым сцеплением до тех пор, пока не будут достаточно точно определены или оценены важные факторы влияния, такие как, например, общая масса транспортного средства. Однако теперь отключение двигателя транспортного средства не является обязательным для существенного изменения загрузки и, прежде всего, для, например, транспортных средств для обслуживания стройплощадок, таких как самосвалы и бетономешалки, для определенных автомобилей-цистерн, а также и для транспортных средств для перевозки пассажиров, таких как школьные и туристические автобусы, скорее является исключением чем правилом.
Для по меньшей мере частичного устранения описанных недостатков представленного в DE 10249951 A1 способа согласно изобретению для улучшения этого способа предлагается, прежде всего, менее строго придерживаться требований для разрешения процесса переключения с замкнутым сцеплением и для этого при принятом решении о переключении передач с замкнутым сцеплением дополнительно предпринять этап для выключения предварительно включенной передачи для проверки правильности решения.
Более конкретно исходят из того, что при принятии неверного решения о режиме переключения передач коробка передач не может быть выставлена в значительной мере без крутящего момента так, что является возможным выключение соответственно включенной передачи с малым усилием переключения в течение предварительно заданного времени.
Поэтому при принятом решении о переключении передачи при замкнутом сцеплении вводится ограничение по времени для выключения соответственно включенной передачи, при превышении которого исходят из того, что необходимые условия осуществления процесса включения целевой передачи при замкнутом сцеплении не выполнены. В этом случае процесс переключения прерывается и затем снова начинается в режиме переключения с разомкнутым сцеплением или же происходит переключение в этот режим.
Таким образом, это усовершенствование известного способа получает значение действующего в относительно более поздний момент времени аварийного прерывания уже начатого способа. Однако при этом не следует забывать о том, что требования к точности управления двигателя для выключения передачи существенно ниже, чем для включения нужной передачи. Поэтому успешное выключение передачи не может расцениваться как надежный признак того, что и последующее включение передачи при замкнутом сцеплении будет успешным или желательным.
Кроме того, требования к процессу переключения с замкнутым сцеплением соответственно различаются от передачи к передаче и, например, в зависимости от скорости движения и загрузки, а также других рабочих показателей транспортного средства и его окружения. Согласно DE 10249951 A1 это должно быть принято во внимание за счет того, что пороговое время для прерывания попытки переключения передачи при замкнутом сцеплении варьируется в зависимости от подобных параметров, что, в свою очередь, увеличивает сложность способа и, тем самым, либо увеличивает вероятность принятия неверного решения, либо существенно увеличивает необходимый безопасный диапазон для еще проводимого преимущественного процесса переключения при замкнутом сцеплении.
На основании этого в основу изобретения положена задача разработки способа осуществления переключения передач автоматизированной коробки передач при движении с использованием или без использования разделительного сцепления, что в отличие от образующего уровень техники способа предлагает большую надежность с меньшими затратами, и даже при изменении массы транспортного средства при работающем двигателе может быть принято надежное решение о предпочтительности переключения передач при замкнутом разделительном сцеплении, далее также кратко называемого переключением без сцепления.
Решение задачи складывается из признаков независимого пункта изобретения, в то время как предпочтительные варианты и усовершенствования изобретения приведены в независимых пунктах.
В основу изобретения положен вывод о том, что надежность решения о предпочтительности переключения без сцепления может быть увеличена при меньших затратах, если решение о режиме переключения, то есть о включении передачи без сцепления или включении передачи при разомкнутом разделительном сцеплении, принимается в более поздний момент времени процесса переключения. Прежде всего, в основе изобретения лежит вывод о том, что важное для принятия решения общее воздействие многообразия сложно охватываемых согласно уровню техники факторов влияния может быть определено при помощи простых средств и с повышенной надежностью, если автоматизированная коробка передач находится в своем нейтральном положении при выключенной передаче.
Наконец, для принятия решения о применяемом режиме переключения, то есть о переключении без сцепления или же включении передачи, или переключении или же включении передачи при разомкнутом разделительном сцеплении, важна не величина отдельных из приведенных факторов, а получаемые из совокупности всех факторов воздействия на важные для переключения значения частоты вращения, то есть, прежде всего, для значений частот вращения элементов коробки передач, соединяемых друг с другом с геометрическим замыканием без возможности проворачивания.
После выключения предварительно включенной передачи можно путем простого считывания частоты вращения вторичного вала коробки передач с помощью датчика или же достаточно жестко связанного с ней параметра, такого как скорости движения или частоты вращения другого принудительно соединенного с ним геометрическим замыканием элемента коробки передач, и временного изменения данной частоты вращения точно, надежно и с оптимальными затратами определить, изменяется ли скорость движения транспортного средства, а вместе с ней и частота вращения синхронизации, и каким образом.
Для этого нет необходимости, как предлагается согласно уровню техники, в отдельности определять загрузку, наклон, шероховатость дорожного полотна и другие изменяющиеся и часто определяемые только со значительными затратами и/или неточно определяемые параметры и затем объединять их в одно общее значение, что требует долгих расчетов и не исключает вероятность ошибки. К тому же за счет непосредственной регистрации частоты вращения и изменения частоты вращения вторичного вала коробки передач во времени можно относительно просто и точно предсказать их характеристику в течение необходимого для будущего процесса переключения промежутка времени с достаточной степенью точности.
Согласно этому изобретение исходит из способа выбора для осуществления переключения передач автоматизированной коробки передач транспортного средства при движении с использованием или без использования разделительного сцепления, при этом трансмиссия транспортного средства имеет приводной агрегат, автоматизированную коробку передач с несколькими жестко заданными передаточными соотношениями, расположенное между приводным агрегатом и автоматизированной коробкой передач разделительное сцепление с автоматизированным переключением и блок управления переключением для управления изменением передаточного соотношения согласно предписаниям водителя и/или автоматизированного устройства выбора передачи.
При этом блок управления переключением, который может представлять собой как отдельное устройство, так и часть другого устройства управления или работать через несколько соединенных между собой посредством техники передачи данных устройств управления, может быть выполнен так, что после принятия решения блоком принятия решения, который может быть составным компонентом блока управления переключением, отдельным устройством или частью другого устройства управления, соединенным с блоком управления переключением посредством техники передачи данных, может осуществлять или же вызывать изменение передаточного соотношения автоматизированной коробки передач с размыканием разделительного сцепления или без него.
Для решения поставленной задачи предусмотрено, что при наличии заданных базовых условий блок принятия решения вызывает выключение исходной передачи без размыкания разделительного сцепления, затем считывает данные о величине и характеристике тесно коррелирующей с частотой вращения вторичного вала автоматизированной коробки передач величины и по меньшей мере с учетом этих данных принимает решение о включении передачи без сцепления или включении передачи при разомкнутом разделительном сцеплении.
Упомянутые здесь заданные базовые условия нуждаются в более подробном разъяснении. Их следует понимать так, что соответственно имеющиеся в конкретном исполнении данные должны полностью или частично оцениваться в том отношении, кажется ли проведение процесса переключения с разомкнутым разделительным сцеплением принципиально возможным с соответственно определяемой или оцениваемой специалистом вероятностью.
Это следует понимать так, что в тех случаях, в которых вероятность успешного переключения передачи при замкнутом разделительном сцеплении с достаточно большой вероятностью может быть исключена, стремятся к размыканию разделительного сцепления в более ранний момент времени, и от необходимой в других случаях проверки частоты вращения и изменения частоты вращения вторичного вала коробки передач в данном случае целесообразно либо отказаться, либо при необходимости выполнить ее на основании других критериев оценки. Вышеупомянутая достаточно большая вероятность при этом опять же в отдельных случаях должна быть определена специалистом для коробки передач или же трансмиссии.
В целом, например, в тех случаях, в которых, исходя, с одной стороны, из частоты вращения вторичного вала коробки передач в данный момент (или, например, из скорости движения в комбинации с известным передаточным соотношением исходной передачи) и известной целевой передачи, с другой стороны, кажется точным, что приводной двигатель не может достигнуть необходимой для переключения без сцепления частоты вращения, или не сможет ее достигнуть в течение необходимого промежутка времени, или сможет достигнуть только с нежелательными сопутствующими явлениями, нежелательно сначала начинать процесс переключения с замкнутым разделительным сцеплением.
Однако только в соответствующем конкретном отдельном случае применения можно точно определить, где, например, должна находиться нижняя граница частоты вращения приводного двигателя. Также от отдельного случая или от трансмиссии зависит, нужно ли учитывать, например, постоянную границу частоты вращения, или имеет ли блок принятия решения, например, доступ к дополнительной важной информации, такой, например, как температура моторного масла, потребляемая мощность системы в данный момент или работа климатической установки. В этих случаях было бы рационально определить нижнюю границу частоты вращения динамически с учетом этих или других или же дополнительных параметров.
Однако с другой стороны, знакомый с изобретением специалист, например, на основании ограничений в отношении имеющегося в наличии программной памяти или емкости обработки данных блока принятия решения, также может принять решение о том, что он хочет полностью или частично отказаться от проверки базовых условий в конкретном исполнении. Поэтому в крайнем случае для блока принятия решения заданное базовое условие для выключения исходной передачи без размыкания разделительного сцепления может заключаться только в проверке того, находится ли транспортное средство в неподвижном состоянии или же включена ли передача на момент требования переключения и замкнуто ли разделительное сцепление.
Для предлагаемого способа важно, что блок принятия решения, по меньшей мере, если он вызвал выключение исходной передачи без размыкания разделительного сцепления, считывает после этого данные о величине и характеристике тесно коррелирующей с частотой вращения вторичного вала автоматизированной коробки передач величины и принимает решение о режиме переключения для включения целевой передачи по меньшей мере с учетом этих данных.
При этом тесно коррелирующая с частотой вращения вторичного вала автоматизированной коробки передач величина, как уже было упомянуто, может представлять собой, например, частоту вращения колеса транспортного средства, скорость движения транспортного средства или частоту вращения другой вращающейся детали, соотношение скорости которой для имеющейся цели достаточно точно известным образом зависит от скорости вращения первичного вала коробки передач.
По этой ключевой величине и ее характеристике во времени при помощи простых и экономичных средств можно предсказать, какая частота вращения синхронизации первичного вала автоматизированной коробки передач необходима или желательна и какое отклонение от этой частоты вращения здесь допускается или даже является желательным.
Конечно, для принятия решения можно привлечь любые другие данные, как, например, названные в DE 10249951 A1 параметры транспортного средства и рабочие показатели, если это кажется рациональным при анализе соотношения затраты-польза, и, прежде всего, тогда, если эти данные и без того уже доступны на шине данных транспортного средства.
На основании или же по меньшей мере с учетом этих данных блок принятия решения принимает решение о режиме переключения для включения целевой передачи. Таким образом, решение о соответствующем режиме переключения принимается на более поздний по сравнению с уровнем техники момент времени процесса переключения, что позволяет удивительно просто определить сумму многих важных для принятия решения отдельных параметров, определяемых по уровню техники затратным способом и не без ошибок, и провести соответствующую оценку.
При этом качество результата принятого решения уже при применении простых моделей принятия решения очевидно выше такого качества в способе согласно DE 10249951 A1, так как он работает при помощи разнообразно взаимосвязанных цепочек воздействия. Это необходимо ниже подробно объяснить на примере.
Если при считывании по уровню техники, например, при помощи установленных GPS-данных положения на цифровой карте дорог, данных наклона дорожного полотна и направления движения транспортного средства, по ним с учетом примерной или определенной массы транспортного средства определяют сопротивление движению на подъеме, увеличивают его при необходимости на определенное также в зависимости от массы транспортного средства сопротивление транспортного средства качению и зависящего от скорости сопротивления воздуха, и, тем не менее, например, пренебрегают воздействием, например, попутного ветра и неправильно отрегулированным давлением воздуха в шинах, то предлагаемый способ в основном выполняет следующее: отделяет приводимые колеса от приводного агрегата за счет того, что исходная передача выключается при замкнутом разделительном сцеплении и автоматизированная коробка передач таким образом переключается в нейтральное положение.
Затем блок принятия решения наблюдает согласно предлагаемому способу в течение, например, около двухсот миллисекунд и даже дольше, как изменяется скорость движения транспортного средства или частота вращения вторичного вала коробки передач во времени. При этом для имеющейся цели совершенно несущественно, вызвана ли сильная задержка транспортного средства во времени высокой загрузкой и сильным наклоном или малой загрузкой и сильным встречным ветром, и какое влияние оказывают давление воздуха в шинах и коэффициент трения дорожного полотна.
Решающим является только вывод, что транспортное средство, например, замедляется так быстро, что подлежащая включению целевая передача не может быть преимущественно включена при замкнутом сцеплении, поскольку время переключения будет сильно увеличено из-за необходимого уменьшения частоты вращения вторичного вала двигателя при замкнутом разделительном сцеплении, и что процесс переключения при разомкнутом разделительном сцеплении может быть завершен, например, путем активирования внутреннего или внешнего тормоза, действующего на первичный вал автоматизированной коробки передач намного быстрее.
В рамках предлагаемого способа является возможным и рациональным предварительно обработать использованные входные данные, прежде всего, информацию о частоте вращения первичного вала коробки передач. Например, может быть рациональным использовать данные только в первые миллисекунды после успешного выключения исходной передачи, чтобы снизить эффекты, обусловленные изменением нагрузки эластичной деформации. В качестве альтернативы подобные эффекты также могут быть исправлены различными статическими или математическими методами.
В предпочтительной форме осуществления изобретения предусмотрено, что блок принятия решения и блок управления переключением взаимодействуют с автоматизированной коробкой передач с жестко заданными передаточными соотношениями, которая для переключения различных передаточных соотношений использует по меньшей мере преимущественно элементы или конструктивные узлы с геометрическим замыканием. В первую очередь они представляют собой известные специалисту коробки передач с кулачковыми муфтами. Хотя предлагаемый способ принципиально также может быть использован преимущественно для, например, синхронизированных геометрическим замыканием посредством блокирующих колец синхронизатора коробок передач, поскольку по меньшей мере при точной синхронизации это позволяет продлить срок службы блокирующих колец синхронизатора, и к тому же в случае выхода из строя синхронизации коробки передач синхронизация может быть проведена извне, преимущества при применении элементов с геометрическим замыканием для переключения передач особенно велики. Это связано с тем, что при их наличии по меньшей мере при необходимом ускорении приводного вала коробки передач синхронизация должна проводиться извне путем увеличения частоты вращения двигателя. При этом синхронизация может быть существенно улучшена при помощи предлагаемого способа как в отношении износа разделительного сцепления, так и в отношении качества переключения при относительно низких затратах.
Согласно другому варианту способа может быть предусмотрено, что при наличии заданных базовых условий блок принятия решения вызывает выключение исходной передачи без размыкания разделительного сцепления и в дальнейшем осуществляет контроль того, производится ли выключение исходной передачи в течение предварительно заданного отрезка времени. Для случая превышения предварительно заданного отрезка времени без выключения исходной передачи происходит переход на другой режим переключения для переключения с размыканием разделительного сцепления.
Подобная защитная функция техники управления известна сама по себе из уровня техники, однако она все же относится к определенным специальным случаям, а именно к началу обратного переключения. Предпочтительно контроль успешного выключения исходной передачи в рамках предлагаемого способа, в первую очередь, выполняется в абсолютно другой точке времени в ходе осуществления способа, а именно перед принятием решения о применяемом режиме переключения. Соответственно, эта защитная функция выполняет совершенно другую задачу.
В то время как в уровне техники эта защитная функция используется для того, чтобы после принятия решения о процессе переключения без использования сцепления в случае неверного решения в качестве аварийной стратегии обеспечить дальнейшее проведение переключения или не допустить, что блок управления коробкой передач без ограничения во времени находится в режиме ожидания переключения передачи, эта защитная функция используется в предлагаемом способе для того, чтобы еще перед принятием решения о режиме переключения передачи в соответствии с описанным выше способом обеспечить возможность принятия более раннего решения о режиме переключения передачи при разомкнутом разделительном сцеплении.
Хотя эта защитная функция, конечно, выполняет также и здесь приданную задачу предотвращения или же снятия «зависания» в ходе выполнения процесса, кроме того, здесь она также приобретает значение сокращения способа, так как можно избежать принятия решения о применяемом способе переключения обычным путем, а именно посредством оценки характеристики частоты вращения вторичного вала коробки передач в нейтральном положении.
Хотя положительный эффект подобного „сокращения" способа в способе согласно уровню техники на основании несравнимо больших необходимых затрат был бы больше, это усовершенствование предлагаемого способа тем не менее предлагает возможность принятия рационального решения о режиме переключения в более ранний момент времени и избежать избыточных оценок.
Согласно еще одному варианту способа предусмотрено, что блок управления переключением перед принятием решения о режиме переключения начинает с управления актуаторами разделительного сцепления в направлении положения открытия разделительного сцепления, при этом блок управления переключением осуществляет такое управление перед принятием решения о режиме переключения только до тех пор, пока это не приводит к проскальзыванию разделительного сцепления или же значительному на практике износу фрикционных накладок разделительного сцепления. При этом можно начать процесс перемещения разделительного сцепления непосредственно во время или даже перед началом процесса переключения. Это позволяет осуществить сравнительно медленное перемещение актуаторов и тем самым уменьшает их износ.
Такой подход приводит к тому, что к моменту принятия решения о режиме переключения для случая, в котором переключение должно быть осуществлено с разомкнутым сцеплением, разделительное сцепление уже частично разомкнуто или ослаблено, за счет чего можно ускорить протекание последующего процесса переключения. Также может быть предусмотрено, что разделительное сцепление размыкается до тех пор, пока прежняя передача является выключаемой.
Для случая, когда принимают решение в пользу включения передачи с замкнутым сцеплением, разделительное сцепление может быть немедленно переведено в свое исходное замкнутое положение и тем самым передавать максимально возможные крутящие моменты.
Поскольку блок управления переключением управляет скоростью перемещения актуаторов сцепления в зависимости от степени снижения нагрузки, то образуется для случая, когда снижение нагрузки осуществляется быстро и поэтому является вероятным переключение при замкнутом сцеплении, желательно более медленное перемещение исполнительных элементов разделительного сцепления, а для случая, в котором снижение нагрузки осуществляется медленно и поэтому вероятным является переключение при разомкнутом сцеплении, относительно быстрое или же продолжающееся к заданному моменту времени открытие или же ослабление разделительного сцепления. Поэтому последующий процесс переключения может быть проведен особенно быстро.
Предпочтительно начальное управление актуаторами размыкающего сцепления может проводиться также вне зависимости от собственно выполняемой программы и быть вынесено, например, в собственный модуль или имеющийся модуль управления сцепления. К тому же является возможным привлечение дополнительных параметров для управления актуаторами разделительного сцепления, которые также играют важную роль для более позднего принятия решения о режиме переключения.
В заключение следует отметить, что положение привода разделительного сцепления при выключенной прежней передаче и не включенной еще целевой передаче, то есть в нейтральном положении коробки передач, осуществляется в зависимости от математического знака и/или числового значения разницы между заданной и фактической частотой вращения первичного вала коробки передач, и/или от числового значения уровня частоты вращения первичного вала коробки передач при целевой передаче, и/или от соотношения градиента целевой частоты вращения и градиента частоты вращения вторичного вала двигателя внутреннего сгорания, и/или от сопротивления движению.
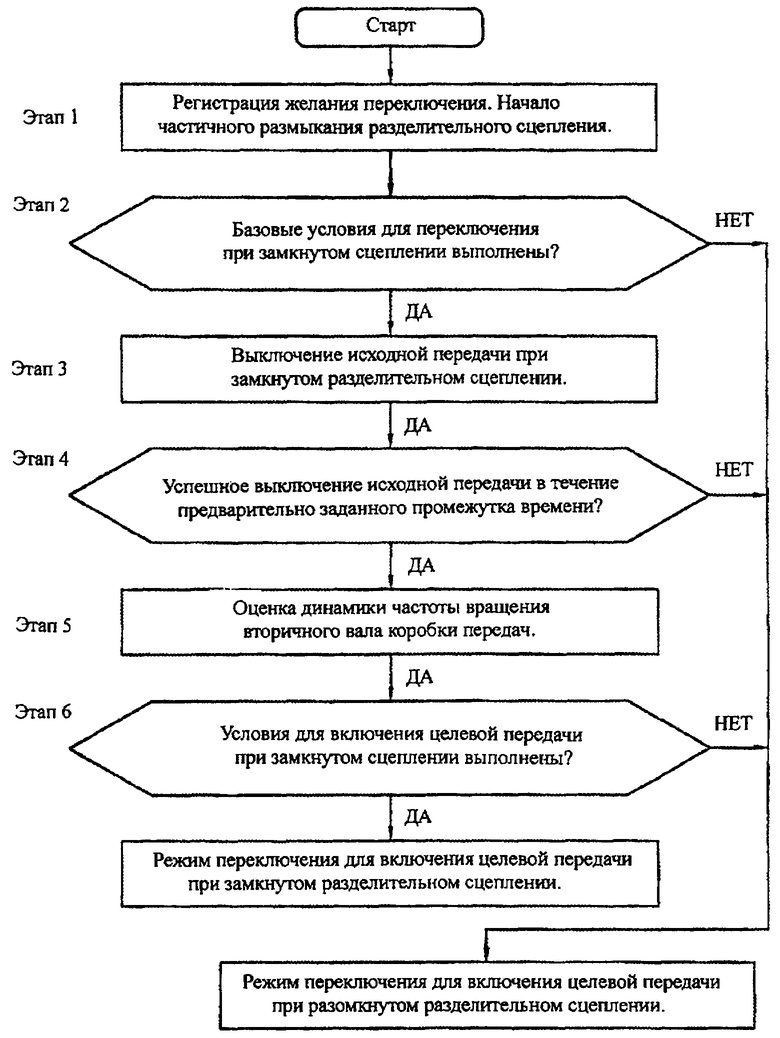
Изобретение может быть разъяснено подробнее на основании примера осуществления. Для этого к описанию прилагается алгоритм, который представляет сильно упрощенный план выполнения представленного способа.
Этот способ выполняется в качестве программы в комбинированном электронном блоке управления коробкой передач и сцеплением.
Исходя из транспортного средства, которое движется со скоростью 30 км/ч, с двигателем внутреннего сгорания в качестве двигателя, несинхронизированной многоступенчатой коробкой передач с кулачковыми муфтами и расположенным между коробкой передач с кулачковыми муфтами и двигателем внутреннего сгорания разделительным сцеплением с автоматизированным переключением, принимают, что водитель или автоматизированный блок управления переключением подает сигнал о том, что коробка передач с кулачковыми муфтами должна осуществить переключение с включенной второй передачи на третью передачу.
Эту команду на переключение принимает блок управления переключением с встроенным блоком принятия решения, который на подготовительном этапе 1 сначала на основании известной скорости движения и исходной передачи, а также целевой передачи, определяет приблизительную, подлежащую установлению двигателем внутреннего сгорания частоту вращения синхронизации, и начинает медленно перемещать актуаторы сцепления в направлении положения размыкания разделительного сцепления.
В ходе следующего этапа 2 основной части программы процесса блок принятия решения проверяет наличие заданных базовых условий для режима включения целевой передачи при замкнутом сцеплении. В этом примере сначала осуществляется запрос, движется ли транспортное средство и включена ли в настоящий момент времени исходная передача. На это получают положительный ответ. Далее производится проверка того, должно ли переключение осуществляться через две или большее количество передач. Это не так. Если это было бы верно (ответ "НЕТ"), то на основании значительной разницы в частоте вращения между устанавливаемой частотой вращения синхронизации и моментальной частотой вращения двигателя внутреннего сгорания переключение при замкнутом разделительном сцеплении не было бы преимущественным, и программа немедленно приняла бы решение о переключении передачи при разомкнутом сцеплении, а также передала бы оставшиеся задачи управления блоку управления, который выполнил бы управление актуаторами с предусмотренной для данного режима скоростью перемещения и провел бы обычное переключение с размыканием разделительного сцепления. Дальнейшие расчеты можно было бы не проводить и ход выполнения программы блока принятия решения можно было бы завершить (разветвление к прямоугольнику выполнения действия внизу на алгоритме). Так как в описанном здесь примере базовые условия выполнены (ответ "ДА"), программа переходит к этапу 3.
В ходе этапа 3 блок управления переключением вызывает выключение третьей передачи при замкнутом сцеплении в соответствии с обычными и достаточно известными установками, то есть прежде всего при наличии достаточного, вызванного за это время, например, блоком управления двигателя снижения мощности приводного двигателя.
Кроме того, следует отметить, что это снижение нагрузки относится не только к тем случаям, в которых приводной двигатель передает на коробку передач с кулачковыми муфтами положительный крутящий момент, но также и к таким рабочим ситуациям, в которых, например, используется торможение двигателем и поэтому положительный крутящий момент передается в сам двигатель внутреннего сгорания. Решающее значение здесь имеет, прежде всего, достаточно низкое значение передаваемого крутящего момента, поскольку при слишком большом передаваемом крутящем моменте выключение передачи было бы невозможно или по меньшей мере нежелательно. Однако эти процессы известны специалисту и не требуют здесь дальнейшего разъяснения.
В качестве альтернативы можно также известным способом подать на актуатор сигнал управления для выключения включенной третьей передачи с выбранным результирующим усилием управления, чтобы достичь выключения передачи, как только описанный выше крутящий момент станет достаточно низким.
В ходе этапа 4 блок принятия решения проверяет, истек ли установленный постоянный или рассматриваемый при данных обстоятельствах соразмерным промежуток времени без успешного выключения третьей передачи. Если это так, то это является однозначным указанием на то, что включение второй передачи при замкнутом разделительном сцеплении не может быть проведено с желаемой точностью или же в течение желаемого времени на переключение. В этом случае блок принятия решения также принимает решение о проведении переключения при разомкнутом разделительном сцеплении, завершает выполнение программы через ответ «НЕТ» и передает блоку управления переключением управление процессом переключения при разомкнутом сцеплении (разветвление к прямоугольнику выполнения действия внизу на алгоритме).
При условии, что третья передача может быть выключена с предустановленным усилием актуатора и в течение максимально предусмотренного для этого промежутка времени (ответ "ДА"), программа переходит к этапу 5.
В ходе этого этапа 5 блок принятия решения осуществляет контроль динамики частоты вращения вторичного вала коробки передач, при этом в этом случае, например, в течение первых 15 миллисекунд она не учитывается, поскольку на нее слишком сильно воздействуют обусловленные ослаблением вращательные движения вторичного вала коробки передач. В следующие, например, 300 миллисекунд или же до поступления достаточно содержательных данных, однако в течение устанавливаемого максимального промежутка времени для отдельного случая, например в 500 миллисекунд, блок принятия решения проводит оценку динамики частоты вращения вторичного вала коробки передач.
Далее для принятия решения о выбираемом режиме переключения в ходе этапа 6 будут рассмотрены, в качестве примера, два случая.
В первом случае блок принятия решения определяет, что транспортное средство сильно замедляется. Это может быть вызвано, например сильным наклоном дорожного полотна, толстым слоем песка на основании, сильным встречным ветром при низкой загрузке или другими факторами. В конечном счете, причина ускорения здесь не является существенной, так как блок принятия решения должен только оценить, является ли в имеющихся обстоятельствах предпочтительным переключение с размыканием или без размыкания разделительного сцепления. В этом случае осуществляется переключение на повышенную передачу. Поэтому после включения целевой передачи имеющаяся на двигателе внутреннего сгорания частота вращения и без того значительно ниже исходной частоты вращения. В дальнейшем этот эффект усиливается за счет того, что разница между передаточными соотношениями второй и третьей передачи по отношению к переключениям других передач является относительно большой.
Поскольку в этом примере одновременно усиливается замедление частоты вращения вторичного вала коробки передачи, блок принятия решения распознает, что доведение двигателя внутреннего сгорания до частоты вращения синхронизации в этом случае займет нежелательно длительное время. При этом это привело бы к соревнованию между замедлением частоты вращения двигателя внутреннего сгорания и одновременному уменьшению необходимой частоты вращения синхронизации. Поэтому блок принятия решения подает сигнал в блок управления переключением (ответ "НЕТ"), что процесс переключения должен выполняться при замкнутом разделительном сцеплении, поскольку таким образом с помощью воздействующего на приводной вал коробки передач трансмиссионного тормоза можно достичь частоты вращения синхронизации существенно быстрее.
В качестве альтернативы или дополнительно решение в немного более затратном способе принятия решения также может учитывать тот факт, что при достижении частоты вращения синхронизации при замкнутом разделительном сцеплении частота вращения двигателя предположительно была бы так мала, что при помощи двигателя внутреннего сгорания невозможно было бы достичь нужного крутящего момента.
В этом случае является оправданным, что актуаторы разделительного сцепления уже до определенной степени были приведены в направлении разомкнутого положения разделительного сцепления и исходная передача уже была бы выключена. Переключение передач может происходить почти так же быстро, как если бы переключение при замкнутом разделительном сцеплении изначально не рассматривалось.
Во втором рассматриваемом в качестве примера случае блок принятия решения приходит к результату, что замедление транспортного средства только незначительно или что оно даже слегка ускоряется, поскольку, например, движется по ровному и гладкому дорожному полотну при умеренном попутном ветре и к тому же сильно загружено. Также и здесь причины ускорения транспортного средства, в конечном счете, являются несущественными. Однако блок принятия решения распознает, что в этом случае частота вращения двигателя внутреннего сгорания при замкнутом сцеплении и без применения трансмиссионного тормоза, рассчитанного для подобного рода инертных масс, может быть без проблем доведена в течение приемлемого промежутка времени до предположительно необходимой частоты вращения синхронизации. В этом случае блок принятия решения передает команду (ответ "ДА") на проведение процесса переключения при замкнутом разделительном сцеплении на блок управления переключением, который вызывает выполнение и осуществляет контроль последующих этапов. Сюда также относится, например, управление возвратом актуаторов разделительного сцепления в исходное положение для того, чтобы сразу же после включения третьей передачи разделительное сцепление могло без проскальзывания передавать максимальный крутящий момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ В АВТОМАТИЗИРОВАННОЙ КОРОБКЕ ПЕРЕДАЧ | 2006 |
|
RU2398693C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В АВТОМАТИЗИРОВАННОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015039C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| АВТОМАТИЗИРОВАННАЯ МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ И СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ В КОРОБКЕ ПЕРЕДАЧ | 1994 |
|
RU2116895C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2017 |
|
RU2650330C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015937C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2077997C1 |
| КОРОБКА ПЕРЕДАЧ, ПЕРЕКЛЮЧАЕМАЯ ПОД НАГРУЗКОЙ, И СПОСОБ ЕЕ ПЕРЕКЛЮЧЕНИЯ | 2005 |
|
RU2360162C2 |
| ПРИВОДНАЯ СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ УКАЗАННОЙ СИСТЕМОЙ | 2017 |
|
RU2723370C2 |
Изобретение относится к способу осуществления переключения передачи автоматизированной коробки передач транспортного средства во время движения. Способ заключается в том, что при наличии заданных базовых условий блок принятия решения вызывает выключение исходной передачи без размыкания разделительного сцепления, блок принятия решения считывает данные о величине и характеристике тесно коррелирующей с частотой вращения вторичного вала автоматизированной коробки передач величины. С учетом этих данных о величине и характеристике блок принятия решения включает передачу без сцепления или включает передачу при разомкнутом разделительном сцеплении. Технический результат заключается в повышении надежности переключения передач. 7 з.п. ф-лы, 1 ил.
1. Способ осуществления переключения передачи автоматизированной коробки передач транспортного средства во время движения с использованием или без использования разделительного сцепления, при этом трансмиссия транспортного средства имеет приводной агрегат, автоматизированную коробку передач с несколькими жестко заданными передаточными соотношениями, расположенное между приводным агрегатом и автоматизированной механической коробкой передач разделительное сцепление с автоматизированным переключением и блок управления переключением для управления переключением передаточного соотношения согласно предписаниям водителя и/или автоматизированного устройства выбора передачи, причем блок управления переключением выполнен так, что он после принятия решения блоком принятия решения имеет возможность осуществления изменения передаточного соотношения автоматизированной коробки передач с размыканием или без размыкания разделительного сцепления, отличающийся тем, что при наличии заданных базовых условий блок принятия решения вызывает выключение исходной передачи без размыкания разделительного сцепления, затем считывает данные о величине и характеристике тесно коррелирующей с частотой вращения вторичного вала автоматизированной коробки передач величины и по меньшей мере с учетом этих данных принимает решение о включении передачи без сцепления или включении передачи при разомкнутом разделительном сцеплении.
2. Способ по п.1, отличающийся тем, что блок принятия решения и блок управления переключением взаимодействуют с автоматизированной коробкой передач с жестко заданными передаточными соотношениями, которая для переключения различных передаточных соотношений использует по меньшей мере преимущественно элементы с геометрическим замыканием.
3. Способ по п.1 или 2, отличающийся тем, что при наличии заданных базовых условий блок принятия решения вызывает выключение исходной передачи без размыкания разделительного сцепления и затем осуществляет контроль, осуществляется ли выключение исходной передачи в течение предварительно заданного промежутка времени, и в случае, если предварительно заданное время истекает без выключения исходной передачи, вызывает изменение режима переключения на переключение с размыканием разделительного сцепления.
4. Способ по п.1 или 2, отличающийся тем, что блок управления переключением к моменту перед принятием решения о режиме переключения начинает с того, что подает сигналы управления на актуаторы разделительного сцепления для перемещения их в направлении разомкнутого разделительного сцепления, и что блок управления переключением проводит это управление перед принятием решения о режиме переключения только до тех пор, пока это не приводит к проскальзыванию разделительного сцепления.
5. Способ по п.3, отличающийся тем, что блок управления переключением к моменту перед принятием решения о режиме переключения начинает с того, что подает сигналы управления на актуаторы разделительного сцепления для перемещения их в направлении разомкнутого разделительного сцепления, и что блок управления переключением проводит это управление перед принятием решения о режиме переключения только до тех пор, пока это не приводит к проскальзыванию разделительного сцепления.
6. Способ по п.4, отличающийся тем, что блок управления переключением управляет скоростью перемещения актуаторов сцепления в зависимости от степени снижения нагрузки.
7. Способ по п.5, отличающийся тем, что блок управления переключением управляет скоростью перемещения актуаторов сцепления в зависимости от степени снижения нагрузки.
8. Способ по п.1 или 2, отличающийся тем, что положение привода разделительного сцепления при выключенной прежней передаче и еще не включенной целевой передаче осуществляется в зависимости от математического знака и/или числового значения разницы между заданной и фактической частотой вращения первичного вала коробки передач, и/или от числового значения уровня частоты вращения первичного вала коробки передач при целевой передаче, и/или от соотношения градиента целевой частоты вращения и градиента частоты вращения вторичного вала двигателя внутреннего сгорания, и/или от сопротивления движению.
| WO 2006053670 A1, 26.05.2006 | |||
| US 6604438 B2, 12.08.2003 | |||
| US 5488878 A, 06.02.1996 | |||
| КОРОБКА ПЕРЕДАЧ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2090385C1 |

