Предлагаемое изобретение относится к вычислительной технике и может найти применение в устройствах управления электропневматическим приводом коробок передач и может быть использовано в приводах машин и механизмов, в частности автомобильной технике, в оборудовании для бурения грунта или горных пород и т.п., и т.д.
Известно устройство дистанционного переключения передач транспортного средства (см. авторское свидетельство №1255464 СССР, опубл. 07.09.1986 г., по заявке №3879269 от 02.04.85 г., заявитель Белорусский Ордена Трудового Красного Знамени Политехнический институт, МПК 4 В60K 17/10), содержащее установленный на крышку коробки передач корпус, внутри которого размещен шток с закрепленным симметрично на нем рычагом, соединенным своим хвостовиком со штоком коробки передач. При этом концы штока механизма, пропущенные от рычага через стенки корпуса, соединяются с каждой стороны с двумя установленными в цилиндрах соосно относительно друг друга разного диаметра поршнями. Цилиндры, жестко прикрепленные к корпусу, с торцов закрыты крышками, которые образуют полости, сообщаемые с помощью трубопроводов с электроклапанами, обеспечивающими подачу энергоносителя, перемещение штока с рычагом и включение соответствующих передач.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие в указанном механизме электронной программируемой системы управления, что не позволяет использовать высокие скорости и адаптивные механизмы управления, позволяющие повысить быстродействие, надежность и долговечность работы коробки передач за счет быстрого учета параметров работы и особенностей конкретного образца коробки передач.
Известно устройство дистанционного переключения в механической ступенчатой коробке передач транспортного средства (см. авторское свидетельство СССР №1063655, кл. В60K 41/06, опубл. 15.09.1980 г.), содержащее логический управляющий электронный блок, с первого по третий входы которого электрически соединены с датчиками включения передач механизма автоматизированного переключения передач, установленного на крышке коробки передач, промежуточный и вторичный валы которой формируют с помощью установленных в коробке передач датчиков частот вращения указанных валов сигналы, поступающие на четвертый и пятый входы управления управляющего логического электронного блока. Шестой вход указанного блока электрически связан с датчиком положения сцепления, седьмой вход - с датчиком положения топливоподачи, восьмой вход - с контроллером внешнего управляющего устройства транспортного средства, с первого по пятый выходы электрически связаны с электропневмоклапанами, имеющими объединенные первые и вторые входы управления, запитанными от пневмосистемы транспортного средства и пневматически соединенными с рабочими полостями механизма автоматизированного переключения передач. С шестого по девятый выходы логического управляющего электронного блока электрически связаны с имеющими объединенные первые и вторые входы управления электропневмоклапанами, запитанными от пневмосистемы и пневматически соответственно соединенными с механизмами управления сцеплением, топливоподачей и остановом двигателям, выполненными в виде пневмоцилиндров и механически соединенными с соответствующими агрегатами.
Признак аналога, совпадающий с признаком заявляемого технического решения, - логический электронный блок.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие возможности программного управления, таймера, интеллектуальных ключей и перепрограммируемого энергонезависимого запоминающего устройства, без которых невозможно реализовать процедуры управления, учитывающие временные характеристики работы конкретных коробок передач, и благодаря этому обеспечить минимальное по времени и максимальное по повышению ресурса работы переключение передач, а также обеспечить повышение безопасности движения путем контроля цепей управления перед началом каждого переключения передач
Наиболее близким к заявляемому изобретению является механизм автоматизированного переключения передач в механической ступенчатой коробке передач (см. патент №2015936 РФ, опубл. 15.07.1994 г., по заявке №4949439 от 27.06.1991 г., патентообладатель Паршин Н.Е. и др., МКИ 5 В60К 20/00). Устройство дистанционного переключения передач, в котором применяется рассматриваемый механизм автоматизированного переключения передач, содержит задатчик режимов движения, электрически соединенный с управляющим логическим электронным блоком, включающим процессор, соединенный с первым регистром управления ключами электропневмоклапанов, первым интерфейсом датчиков, вторым регистром управления блоком индикации и вторым интерфейсом задатчика режимов движения. Под интерфейсом принимают блок согласования напряжений двух соединенных элементов. Управляющий логический электронный блок электрически связан с блоком индикации, запитан от блока питания и размещен вне коробки передач, на которой закреплен механизм автоматизированного переключения передач с двумя электропневмоклапанами цилиндров включения передач и двумя электропневмоклапанами цилиндра выбора передач, датчиками включения и выбора передач. На коробке передач установлены датчики частоты вращения промежуточного (или первичного) и вторичного валов. Указанный механизм включает также электропневмоклапаны управления сцеплением, топливоподачей двигателя и остановом двигателя. Включение передач производится с помощью задатчика режимов движения, соединенного с логическим электронным блоком.
Признаки аналога, совпадающие с признаками заявляемого технического решения, следующие: микроконтроллер, интерфейс датчиков, интерфейс задатчика режимов движения.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие таймера, интеллектуальных ключей и перепрограммируемого энергонезависимого запоминающего устройства, без которых невозможно учитывать временные характеристики работы конкретных коробок передач и благодаря этому обеспечить минимальное по времени и максимальное по повышению ресурса работы переключение передач, а также обеспечить повышение безопасности движения путем контроля цепей управления перед началом каждого переключения передач.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении ресурса работы коробки передач, повышении быстродействия переключения передач и повышении безопасности движения.
Технический результат, обеспечиваемый при реализации заявляемого технического решения, заключается в повышении быстродействия и ресурса работы коробки передач за счет использования в устройстве управления электропневматическим приводом коробки передач таймера и перепрограммируемого энергонезависимого запоминающего устройства, при помощи которых происходит измерение и запоминание времени прохождения каждой фазы переключения конкретного образца коробки передач и осуществление импульсного управления электропневмоклапанами, которое обеспечивает оптимальное по времени и механическим нагрузкам включение передач, а также в повышении безопасности движения за счет использования в устройстве управления электропневматическим приводом коробки передач интеллектуальных ключей, которые обеспечивают контроль всех цепей управления перед проведением каждого переключения.
Для достижения указанного технического результата в устройство управления электропневматическим приводом механической ступенчатой коробки передач привода, содержащее микроконтроллер, соединенный с интерфейсом датчиков и интерфейсом задатчика режимов движения, дополнительно вводят, по меньшей мере, интерфейс цифрового канала, таймер, интеллектуальные ключи, перепрограммируемое энергонезависимое запоминающее устройство, блок питания, интерфейс блока индикации, причем микроконтроллер соединен с интеллектуальными ключами, интерфейсом блока индикации, перепрограммируемым запоминающим устройством, таймером и интерфейсом цифрового канала, интерфейс задатчика режимов движения соединен с интерфейсом блока индикации, перепрограммируемым энергонезависимым запоминающим устройством, блоком питания, интерфейсом цифрового канала, таймером, интерфейсом датчиков и интеллектуальными ключами, интерфейс датчиков соединен с интеллектуальными ключами.
Электропневматический привод механической ступенчатой коробки передач привода может содержать, по меньшей мере, блок индикации, задатчик режимов движения, который содержит, по меньшей мере, датчики выбора передач и органы управления, установленный на коробке передач механизм автоматизированного переключения передач с датчиками включения передач, датчиками выбора штока, двумя электропневмоклапанами цилиндров включения передач и двумя электропневмоклапанами цилиндров выбора штока, датчик положения сцепления, причем блок индикации соединен с интерфейсом блока индикации, выходы интеллектуальных ключей соединены со входами электропневмоклапанов, цилиндров выбора штока и цилиндров включения передач соответственно, входы интерфейса датчиков соединены с выходами датчиков соответственно включения передач и выбора штока, датчика положения сцепления, объединенные входы питания датчиков, выбора штока и включения передач соответственно и датчика положения сцепления соединены с выходом блока питания, а вход блока питания соединен с внешним источником питания, интерфейс задатчика режимов движения устройства управления электропневматическим приводом коробки передач соединен с датчиками выбора передач и органами управления задатчика режимов движения.
Возможен вариант установки устройства управления электропневматическим приводом механической ступенчатой коробки передач в задатчике режимов движения.
По п.2 формулы изобретения соединение блока индикации осуществляется непосредственно через интерфейс блока индикации устройства управления электропневматическим приводом механической ступенчатой коробки передач, по п.4 формулы изобретения соединение происходит через цифровой канал с интерфейсом цифрового канала устройства управления электропневматическим приводом механической ступенчатой коробки передач.
Привод может содержать, по меньшей мере, двигатель, соединенный с механической ступенчатой коробкой передач через сцепление с механизмом управления сцеплением.
На двигателе может быть расположена система управления двигателем, которая соединена с выходом интерфейса цифрового канала посредством цифрового канала.
Двигатель может содержать механизмы управления топливоподачей и торможением двигателя с электропневмоклапанами, соответственно управления топливоподачей и торможением двигателя, входы которых соединены с выходами интеллектуальных ключей, и датчик уровня цикловой подачи топлива, выход которого соединен с одним из входов интерфейса датчиков.
Механизм управления сцеплением может содержать, по меньшей мере, электропневмоклапан управления сцеплением, вход которого соединен с выходом одного из интеллектуальных ключей.
Механическая ступенчатая коробка передач может дополнительно содержать делитель, управляемый двумя электропневмоклапанами, входы которых соединены с выходами интеллектуальных ключей, может содержать датчик состояния делителя, выход которого соединен с одним из входов интерфейса датчиков, также может содержать демультипликатор, управляемый двумя электропневмоклапанами, и датчик состояния демультипликатора, выход которого соединен с одним из входов интерфейса датчиков, причем входы электропневмоклапанов соединены с выходами интеллектуальных ключей, может содержать датчик частоты вращения первичного вала, выход которого соединен с одним из входов интерфейса датчиков, может содержать датчик частоты вращения вторичного вала, выход которого соединен с одним из входов интерфейса датчиков.
Механическая ступенчатая коробка передач может содержать делитель, управляемый двумя электропневмоклапанами, и демультипликатор, управляемый двумя электропневмоклапанами, и датчик состояния демультипликатора.
В качестве датчиков частоты вращения первичного и вторичного валов могут быть использованы контрольные и/или измерительные приборы, причем эти приборы могут быть соединены с выходом интерфейса цифрового канала посредством цифрового канала.
В качестве цифрового канала можно использовать интерфейс CAN.
Под приводом в технике понимают устройство, состоящее из источника энергии, передающих механизмов и аппаратуры управления, служащее для приведения в движение машин и механизмов. Источником энергии является двигатель (тепловой, электрический, пневматический, гидравлический и др.) или устройство, отдающее заранее накопленную механическую энергию (пружинный, гиревой механизм и др.). В некоторых случаях привод осуществляется за счет мускульной силы, например в ручных лебедках, бытовых и других механизмах и машинах (швейных машинах, велосипедах и т.п.). По назначению привод разделяют на стационарный (наиболее распространен электрический привод), передвижной на движущихся рабочих машинах (главным образом, с тепловыми двигателями), транспортный, применяемый на различных транспортных средствах (см. Новый политехнический словарь под редакцией А.Ю.Ишлинского; Москва. Научное издательство «Большая Российская энциклопедия», 2000 г., стр.415).
Внешним источником питания может быть, например, сеть электропитания автомобиля, в которой использован привод.
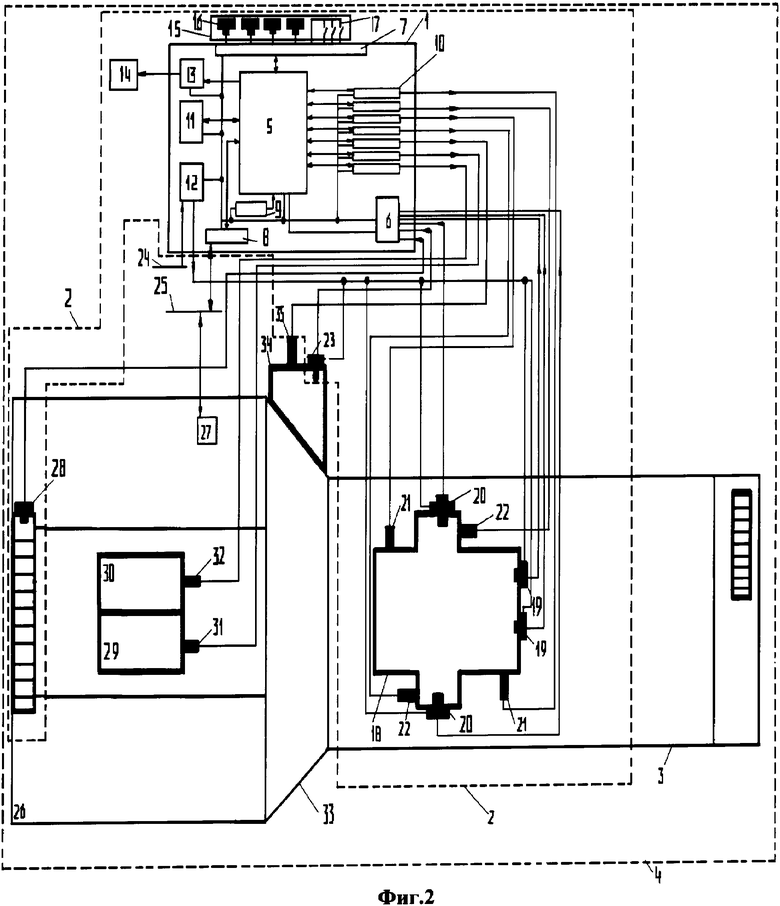
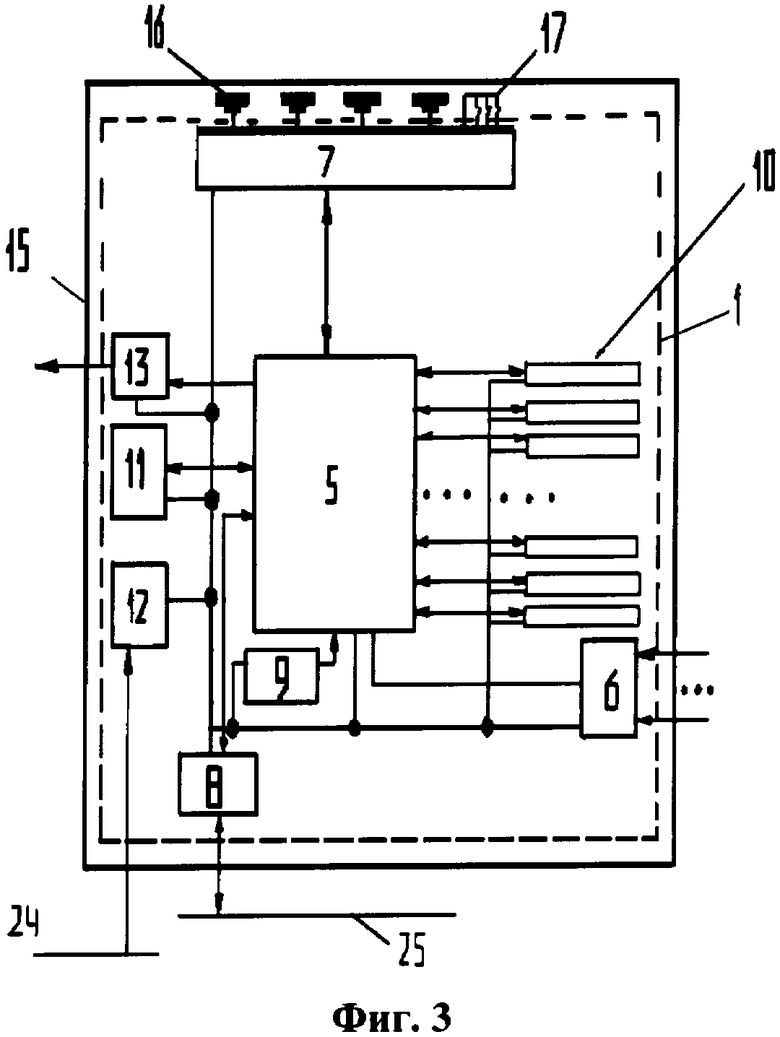
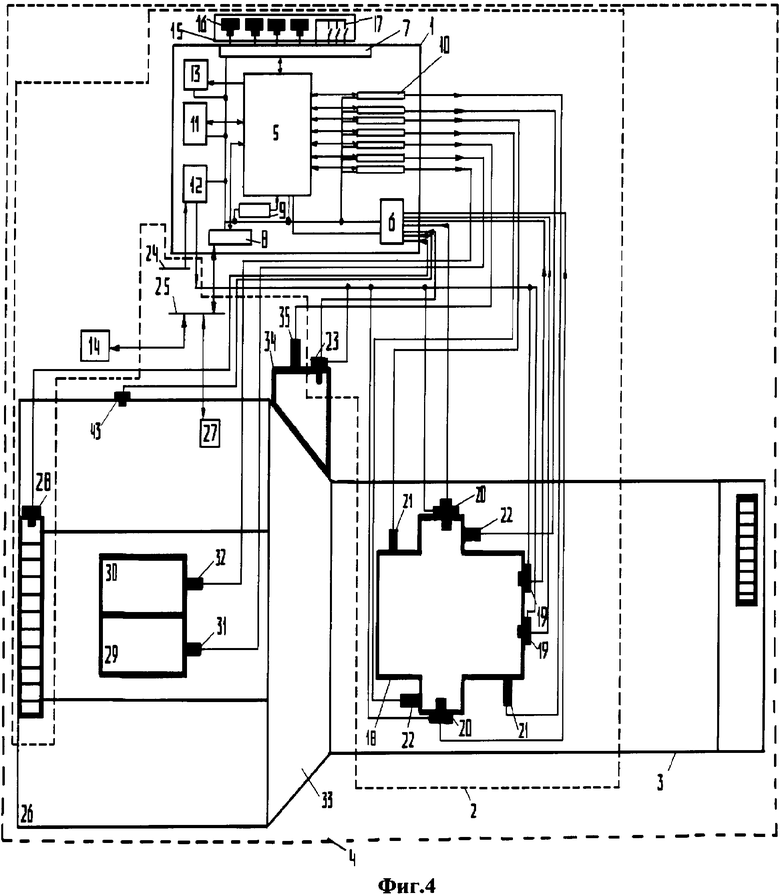
Сущность изобретения, его реализуемость и промышленная применимость поясняются чертежами (фиг.1-9), где на фиг.1 представлена схема устройства управления электропневматическим приводом механической ступенчатой коробки передач, на фиг.2 - примерная схема привода автомобиля с устройством управления электропневматическим приводом механической ступенчатой коробки передач, когда блок индикации соединен с интерфейсом блока индикации, на фиг.3 - схема устройства управления электропневматическим приводом механической ступенчатой коробки передач, расположенного в задатчике режимов движения, на фиг.4 - примерная схема привода автомобиля с устройством управления электропневматическим приводом механической ступенчатой коробки передач, когда блок индикации соединен с интерфейсом цифрового канала, на фиг.5 - примерная схема привода автомобиля с делителем и устройством управления электропневматическим приводом механической ступенчатой коробки передач, на фиг.6 - примерная схема привода автомобиля с демультипликатором и устройством управления электропневматическим приводом механической ступенчатой коробки передач, на фиг.7 - возможная схема переключения передач на задатчике режимов движения для реализации полуавтоматического режима управления механической ступенчатой коробкой передач, на фиг.8 - возможная схема переключения передач задатчика режимов движения для реализации автоматического и полуавтоматического режима управления механической ступенчатой коробкой передач, на фиг.9 - упрощенная схема переключения передач задатчика режимов движения для реализации автоматического и полуавтоматического режима управления механической ступенчатой коробкой передач, на фиг.10.1, 10.2, 11.1, 11.2, 11.3, 12.1, 12.2, 13.1 дан пример работы микроконтроллера 5 в режиме «Ручное управление».
На фиг.2, 4, 5, 6 даны примеры выполнения схемы привода автомобиля, где 1 - устройство управления, 2 - электропневматический привод, 3 - механическая ступенчатая коробка передач, 4 - привод. Устройство управления 1 состоит из микроконтроллера 5, интерфейса датчиков 6, интерфейса задатчика режимов движения 7, интерфейса цифрового канала 8, таймера 9, интеллектуальных ключей 10, перепрограммируемого энергонезависимого запоминающего устройства 11, блока питания 12, интерфейса блока индикации 13, также на фиг.2, 4, 5, 6 показаны блок индикации 14, задатчик режимов движения 15, который содержит датчики выбора 16 передач и органы управления 17, установленный на коробке передач 3 механизм автоматизированного переключения передач 18 с датчиками включения 19 передач, датчиками выбора 20 штока, двумя электропневмоклапанами 21 цилиндров включения передач и двумя электропневмоклапанами 22 цилиндров выбора штока, датчик положения 23 сцепления, также на фиг.2, 4, 5, 6 показан внешний источник питания 24, цифровой канал 25, двигатель 26, система управления двигателем 27, датчик частоты вращения первичного вала 28, механизмы управления топливоподачей и торможением двигателя 29, 30, электропневмоклапаны соответственно управления топливоподачей и торможением двигателя 31, 32, сцепление 33, механизм управления сцеплением 34, электропневмоклапан управления сцеплением 35, делитель 36, электропневмоклапаны 37, датчик состояния делителя 38, демультипликатор 39, электропневмоклапаны 40, датчик состояния демультипликатора 41, датчик частоты вращения вторичного вала 42, датчик уровня цикловой подачи топлива 43.
Устройство управления 1 электропневматическим приводом 2 механической ступенчатой коробки передач 3 работает следующим образом. Переключение передач в механической ступенчатой коробке передач 3 производится при подаче команды от задатчика режимов движения 15 (см. фиг.2, 4) через интерфейс задатчика режимов движения 7 к микроконтроллеру 5 устройства управления 1 электропневматическим приводом 2 коробки передач 3, который, обрабатывая информацию, управляет через интеллектуальные ключи 10 электропневмоклапанами (ЭПК) 21, 22, 31, 32, 35 (см. фиг.2), электропневмоклапанами 37 (см. фиг.5), электропневмоклапанами 40 (см. фиг.6). С целью повышения безопасности движения перед началом движения и при каждом переключении передачи производится контроль цепей управления всех ЭПК с помощью интеллектуальных ключей 10 и, в случае обнаружения неисправности, выдается на блок индикации 14 номер неисправного ЭПК, а дальнейшее переключение передач запрещается. Микроконтроллер 5 через интерфейс блока индикации 13 или цифровой канал 25 выдает информацию о включенной передаче и диагностическую информацию на блок индикации 14. На фиг.2 показан вариант подсоединения блока индикации 14 непосредственно к интерфейсу блока индикации 13 устройства управления 1 электропневматическим приводом механической ступенчатой коробки передач, а на фиг.4 показан вариант подсоединения блока индикации 14 к выходу интерфейса цифрового канала 8 устройства управления 1 электропневматическим приводом механической ступенчатой коробки передач через цифровой канал 25. Устройство управления 1 электропневматическим приводом механической ступенчатой коробки передач может быть расположено как вне задатчика режимов движения 15 (см. фиг.2), так и в самом задатчике режимов движения 15 (см. фиг.3). Микроконтроллер 5 электрически связан с интерфейсом датчиков 6, таймером 9, интерфейсом цифрового канала 8, перепрограммируемым энергонезависимым запоминающим устройством 11 (фиг.1, 2, 3, 4). На коробке передач 3 (см. фиг.2, 4) установлен механизм автоматизированного переключения передач 18 с электропневмоклапанами цилиндров включения передач 21 и цилиндров выбора штока 22, датчиками выбора штока 20 и датчиками включения передач 19. Выходы датчиков 19, 20, 23, 28 (см. фиг.2), а также выходы датчика 38 (см. фиг.5) и выходы датчиков 41, 42 (см. фиг.6) соединены со входами интерфейса датчиков 6 устройства управления 1 электропневматическим приводом механической ступенчатой коробки передач.
Датчик выбора штока 20 (координата Y) - определяет номер штока, с помощью которого включена передача. Значение «10» определяет первый шток, «00» - второй шток, «01» - третий шток и «11» - запрещенная комбинация, говорящая о неисправности датчика (на чертеже не показано). Установка второго датчика выбора штока 20 дает возможность установить номер передачи, которая включена. Номера передач, включаемых конкретным штоком, зависят от типа используемой коробки. Датчик включения передачи 19 (координата X) определяет номер включенной передачи и состояние перехода. Значения «10» и «01» определяют одну из двух, включаемых данным штоком, передач. Значение «11» определяет нахождение коробки передач 3 в нейтральном положении. Значение «00» определяет процесс включения или выключения передачи. Такая конструкция датчика включения передач Х 19 позволяет управлять коробкой передач 3, обеспечивая повышение ресурса работы коробки передач 3.
Датчики выбора передач 16 на задатчике режимов движения 15 определяют номер передачи, которую необходимо включить в коробке передач 3. Конструкция и работа датчиков зависят от выбранной схемы переключения и режима работы устройства управления коробкой передач (фиг.7, 8, 9).
Датчики частоты вращения 28, 42 соответственно первичного и вторичного валов (импульсные датчики) выдают в единицу времени такое количество импульсов, которое пропорционально угловой скорости вращения соответственно первичного и вторичного валов (на чертеже не показано). Датчик 28 частоты вращения первичного вала выдает импульсы с большей частотой (в 5-10 раз), чем датчик 42 частоты вращения вторичного вала. Это необходимо для обеспечения большей точности выравнивания скоростей при центральной синхронизации. Датчик 41 состояния демультипликатора - датчик, определяющий состояние демультипликатора 39. Датчик 41 выключен (обрыв цепи) при стационарном состоянии демультипликатора 39. Датчик 41 включен на землю (минус аккумуляторной батареи) в процессе переключения. Такая работа датчика 41 особенно важна для демультипликатора 39, переключение которого должно производиться в выключенном (нейтральном) состоянии коробки передач 3.
Датчик положения сцепления 23 указывает состояние полностью выключенного сцепления 33. Сигнал выключенного сцепления необходим устройству управления 1 электропневматическим приводом (2) коробки передач (3) для запуска процессов переключения передач.
Датчик 43 уровня цикловой подачи топлива (датчик положения педали акселератора) (см. фиг.4) указывает уровень нагрузки двигателя 26. Сигнал с этого датчика необходим для автоматического определения момента переключения передач.
Устройство управления 1 электропневматическим приводом механической ступенчатой коробки передач обеспечивает работу коробки передач 3 в трех режимах - ручном, полуавтоматическом и автоматическом.
В ручном режиме номер передачи и момент переключения определяются водителем. Работа устройства управления 1 электропневматическим приводом коробки передач в ручном режиме производится следующим образом: задатчиком режимов движения (ЗРД) 15 устанавливается передача, в которую должна быть переведена коробка передач 3, а переключение производится по нажатию педали сцепления (на чертеже не показано) (срабатыванию датчика 23 положения сцепления). Устройство управления 1 электропневматическим приводом механической ступенчатой коробки передач отрабатывает процедуру переключения (процедура переключения приведена ниже). Используется синхронизация с помощью механических синхронизаторов (на чертеже не показано). ЗРД 15 имеет положения, аналогичные положениям механической ручки переключения передач (на чертеже не показано).
В полуавтоматическом режиме работы устройства управления 1 электропневматическим приводом коробки передач момент и направление переключения передачи (повышение или понижение) определяет водитель, а устройство управления 1 электропневматическим приводом коробки передач определяет номер включаемой передачи и управляет процессом переключения передач, обеспечивая центральную синхронизацию. Параллельно педали сцепления (на чертеже не показано) устанавливается механизм управления сцеплением 34, управляемый электропневмоклапаном 35 управления сцеплением. Педаль сцепления (на чертеже не показано) может использоваться только при старте. Кроме того, для выполнения центральной синхронизации первичного и вторичного валов устанавливаются механизмы управления топливоподачей 29 и торможением 30 двигателя, управляемые электропневмоклапанами 31, 32 управления топливоподачей и торможением двигателя соответственно. Если двигатель 26 оборудован системой управления 27 двигателя с цифровым каналом 25, то установка механизмов управления топливоподачей 29 и торможением 30 двигателя для выполнения центральной синхронизации не требуется. ЗРД 15 имеет следующие возможные положения (см. фиг.7):
- движение;
- повышение передачи;
- понижение передачи;
- нейтраль (N);
- задний ход.
Положения «повышение передачи» и «понижение передачи» нефиксированы. По включению ЗРД 15 в положение «повышение» или «понижение передачи» водитель определяет момент и направление переключения передач, после чего ЗРД 15 возвращается в среднее положение. Нейтраль имеет свое фиксированное положение.
При двукратном переводе ЗРД 15 в положение «повышение» или «понижение передачи» производится переключение соответственно через одну передачу вверх или вниз.
В автоматическом режиме устройство управления 1 электропневматическим приводом коробки передач работает следующим образом: передача и момент переключения определяются автоматически. Обязательное наличие механизмов для выполнения центральной синхронизации, аналогичных описанным выше (на чертеже не показано), (пропорционального) электропневмоклапана 35 управления сцеплением, используемого при старте автомобиля, и датчика уровня цикловой подачи топлива (датчика положения педали акселератора) 43. ЗРД 15 имеет три основных положения - движение вперед, движение назад и нейтраль. Педаль сцепления в этом режиме не используется. Для обеспечения возможности работы как в режиме автоматического, так и в режиме полуавтоматического управления необходимо использовать ЗРД 15 со схемой состояний, представленной на фиг.8, либо с упрощенной схемой переключения, представленной на фиг.9. В последнем случае задний ход включается, если затребовано понижение передачи на неподвижном автомобиле (определяется по состоянию датчика частоты вращения вторичного вала 42). Для включения заднего хода, кроме соответствующей установки ЗРД (15), требуется дополнительное нажатие кнопки органов управления 17 «разрешение включения заднего хода» (органы управления представляют собой тумблера и кнопки).
В режиме «Ручное управление» устройство управления 1 электропневматическим приводом коробки передач работает в соответствии со следующей процедурой:
1. По включению питания производится диагностика состояния коробки передач (КП) 3 и выдается на блок индикации 14 номер скорости, которая установлена на КП 3. С помощью интеллектуальных ключей 10 производится контроль цепей управления всех ЭПК и, в случае обнаружения неисправности, выдается на блок индикации 14 номер неисправного ЭПК.
2. Если КП 3 находится не в положении N, то на блок индикации 14 выдается сигнал «Зажигание запрещено» (на чертеже не показано), в противном случае сигнал не выдается. Перед включением зажигания необходимо перевести КП 3 в положение N путем нажатия кнопки органов управления 17 «принудительная установка нейтрали».
3. Если при старте включается не первая или задняя передача, то на блоке индикации 14 выдается сигнал «Старт не возможен» (на чертеже не показано) и включение КП 3 не производится. Если при старте включается задняя передача, то на блоке индикации 14 выдается сигнал «Требуется подтверждение» и включение КП 3 не производится до нажатия кнопки органов управления 17 «подтверждение включения заднего хода». Если при старте включается первая или задняя передача и нажата кнопка органов управления 17 «подтверждение включения заднего хода», то включение передачи производится после нажатия педали сцепления (на чертеже не показано).
4. После переключения ЗРД 15 в новое положение КП 3 остается в предыдущем положении до нажатия педали сцепления.
5. После нажатия педали сцепления (переход датчика положения сцепления 23 в состояние «1») производится контроль цепей управления всех ЭПК с помощью интеллектуальных ключей 10 и, в случае обнаружения неисправности, выдается на блок индикации 14 номер неисправного ЭПК, а переключение передач запрещается. Если неисправности не обнаружены, то производится переключение КП 3 в новое положение (если затребованная передача отличается от существующего состояния КП 3) в 4 этапа:
- этап 1 - перевод КП 3 в нейтральное положение по оси Х с помощью механизма автоматизированного переключения передач 18 путем открывания обоих электропневмоклапанов 21 цилиндров включения передач. Если коробка передач 3 оборудована делителем 36, то переключение делителя 36 начинается одновременно с выключением передачи, по нажатию педали сцепления, путем подачи сигнала на соответствующий ЭПК 37. Питание с ЭПК 37 по завершению переключения делителя 36 не снимается до следующего переключения. Этап заканчивается после перехода датчиков включения передач 21 по оси Х в состояние «11», при этом напряжение на электропневмоклапанах 21 по оси Х остается такое, которое требуется для установки КП 15 в положение N;
- этап 2 - перевод КП 3 по оси Y в новое положение (этап выполняется, если новое положение КП 15 отличается от старого по оси Y). Если коробка передач 3 оборудована демультипликатором 39, то переключение демультипликатора 39 начинается после выключения передачи, путем подачи сигнала на соответствующий ЭПК 40. Питание с ЭПК 40 по завершению переключения демультипликатора 39 не снимается до следующего переключения. После старта процедуры переключения демультипликатора 39 датчик состояния демультипликатора 41 переходит в состояние «1» до завершения переключения демультипликатора 39. Этап заканчивается после принятия датчиком состояния демультипликатора 41 значения «0» и перехода датчиков 20 выбора штока по оси Y в нужное состояние «10», «00» или «01», при этом напряжение на электропневмоклапанах 21 цилиндров включения передач по оси Х снимается, а на электропневмоклапанах 22 цилиндров выбора штока по оси Y остается такое, которое требуется для установки КП 3 в нужное положение «10», «00» или «01»;
- этап 3 - перевод КП 3 по оси Х в новое положение. Напряжение с электропневмоклапанов 22 цилиндров выбора штока по оси Y снимается, а по оси Х напряжение подается на соответствующий электропневмоклапан 21 цилиндров включения передач. Через время tc подается импульс тока длительностью τ, а через время tш подается серия из 2-3 импульсов тока длительностью τ и периодом τп на второй (встречный) ЭПК 21 цилиндров включения передач. Благодаря подаче импульсов на (встречный) ЭПК 21 цилиндров включения передач достигается уменьшение ударных нагрузок на коробку передач 3 со стороны электропневматического привода и, за счет этого, повышение ресурса работы коробки передач 3. Этап заканчивается после перехода датчиков включения передач 19 по оси Х в нужное состояние «10» или «01», при этом на блоке индикации 14 выводится новое положение КП 3, напряжение на электропневмоклапанах 21, 22 по обеим осям остается такое, которое требуется для установки КП 3 в нужное положение «10» или «01». При каждом включении для каждой передачи производится измерение времени выхода из нейтрали (переход датчиков включения передачи 19 из состояния «11» в состояние «00») и времени включения передачи (переход датчиков включения передачи 19 из состояния «11» в состояние «01» или «10») при измерении скоростей вращения первичного и вторичного валов. На основании этих измерений определяются tc и tш, где tc - время от начала включения передачи (подачи сигнала включения на первый электропневмоклапан 21 цилиндров включения передач) до начала подачи первого импульса на встречный электропневмоклапан (второй электропневмоклапан 21 цилиндров включения передач) для обеспечения уменьшения ударных нагрузок на синхронизатор, причем, в зависимости от включаемой передачи, первым электропневмоклапаном 21 цилиндров включения передач из пары электропневмоклапанов может быть любой электропневмоклапан 21 цилиндров включения передач, а tш - время от начала включения передачи до ожидаемого времени завершения синхронизации, при котором подается серия встречных импульсов для обеспечения уменьшения ударных нагрузок на шестерни. При этом tш определяется как функция разности скоростей вращения первичного и вторичного валов;
- этап 4 - после приведения педали сцепления в исходное положение (переход датчика положения сцепления 23 в состояние «0») напряжение со всех электропневмоклапанов снимается.
При нажатии кнопки органов управления 17 «принудительная установка нейтрали» производится принудительный перевод КП 3 в состояние N (этап 1 п.4).
Работа устройства управления 1 электропневматическим приводом коробки передач в режиме «Полуавтоматическое управление» происходит следующим образом:
1. Процедуры старта выполняются аналогично режиму «Ручное управление».
2. Перевод КП 3 в новое положение во время движения осуществляется сразу после кратковременного перевода ЗРД 15 в положение понижение или повышение передачи следующим образом:
- этап 1 - подается сигнал на выключение сцепления (этап завершается по получению сигнала от датчика положения сцепления 23). По завершению этапа сигнал выключения сцепления не снимается;
- этап 2 - подается сигнал на выключение передачи и перевод КП 3 в положение N. Если коробка передач 3 оборудована делителем 36, то переключение делителя 36 начинается одновременно с выключением передачи, по получению сигнала от датчика положения сцепления 23, путем подачи сигнала на соответствующий ЭПК 37. Питание с ЭПК 37 по завершению переключения делителя 36 не снимается до следующего переключения. Этап завершается по получению сигналов от датчиков Х - «11», при этом напряжение на клапанах по оси Х остается такое, которое требуется для установки КП 15 в положение N;
- этап 3 - если коробка передач 3 оборудована демультипликатором 39 и если поступила соответствующая команда, то производится переключение демультипликатора 39 путем подачи сигнала на соответствующий ЭПК 40, в противном случае этап 3 не выполняется и производится переход на следующий этап. Питание с ЭПК 40 по завершению переключения демультипликатора 39 не снимается до следующего переключения. После старта процедуры переключения демультипликатора 39 датчик состояния демультипликатора 41 переходит в состояние «1» до завершения переключения демультипликатора 39. Этап заканчивается после принятия датчиком состояния демультипликатора 41 значения «0». На протяжении этапа 3 сцепление находится в выключенном состоянии;
- этап 4 - включается сцепление путем снятия сигнала выключения сцепления и производится запуск процедуры синхронизации первичного и вторичного валов. Параллельно выполнению процедуры синхронизации первичного и вторичного валов производится перевод КП 3 по оси Y в новое положение (действие выполняется, если новое положение КП 3 отличается от старого по оси Y). Этап заканчивается после перехода датчиков по оси Y в нужное состояние «10», «00» или «01», при этом напряжение на электропневмоклапанах по оси Y остается такое, которое требуется для установки КП 3 в нужное положение «10», «00» или «01»;
- этап 5 - производится контроль приближения скоростей первичного и вторичного валов КП 3 к зоне разрешения включения передачи. При выполнении условий приближения производится перевод КП 3 по оси Х в новое положение. Этап заканчивается после перехода датчиков по оси Х в нужное состояние «10» или «01», при этом на блоке индикации 14 выводится новое положение КП 3, напряжение на электропневмоклапанах по обеим осям снимается.
Работа устройства управления 1 электропневматическим приводом механической ступенчатой коробки передач в режиме «Автоматическое управление» происходит по следующим образом:
1. При переводе ЗРД 15 в положение «Движение» или «Задний ход» подается сигнал на выключение сцепления и КП переводится в соответствующее положение «задний ход» или «первая передача».
2. Производится плавное включение сцепления путем подачи импульсных сигналов переменной длительности на ЭПК управления сцеплением 35. Автомобиль начинает движение назад или вперед на первой передаче. При движении назад дальнейшего переключения передач не производится.
3. При движении вперед постоянно работает процедура определения условия переключения передач. Для определения условий и направления переключения передач в качестве исходных данных используются скорость вращения первичного вала (n) и уровень цикловой подачи топлива (р). Для каждой передачи (i) имеется пара функция niгр=fi(p) для определения граничных значений частоты вращения первичного вала, при превышении (снижении) реальной частоты вращения первичного вала, относительно которого необходимо произвести переключение передач соответственно вверх или вниз.
4. В случае выполнения условий производится переключение передач аналогично тому, как это выполняется в режиме полуавтоматического управления.
При переводе ЗРД 15 в положение «нейтраль» производится снижение скорости автомобиля до полной остановки.
При переключении передач возможны два варианта синхронизации скоростей вращения первичного и вторичного валов коробки передач:
- синхронизация с помощью механических синхронизаторов (используется в режиме «Ручное управление»), установленных на валах перед шестернями соответствующих передач (на чертеже не показано);
- центральная синхронизация с помощью двигателя 26.
Центральная синхронизация может выполняться двумя способами:
- прямым управлением двигателем 26 путем установки и управления электропневмоклапанами торможения 32 двигателя (включения ретардера или горного тормоза) и топливоподачи 31 двигателя (повышения оборотов двигателя);
- передачей команд на систему управления 27 двигателем через цифровой канал 25.
Синхронизация первичного и вторичного валов при прямом управлении двигателем выполняется при движении автомобиля после перевода КП 3 в положение N следующим образом:
1. Если необходимо выполнить понижение передачи, то производится переход на выполнение п.2). Если необходимо выполнить повышение передачи, то производится переход на выполнение п.5).
2. Выдается сигнал на включение электропневмоклапана 31 управления топливоподачей двигателя.
3. Производится измерение скоростей вращения первичного и вторичного валов и определяется момент превышения скорости вращения первичного вала над скоростью вращения вторичного вала с учетом передаточного числа включаемой перечи на величину 50-100 об/мин (величина определяется экспериментально).
4. Снимается сигнал включения с электропневмоклапана 31 управления топливоподачей двигателя.
5. Выдается сигнал на включение электропневмоклапана 32 торможения двигателя.
6. Производится измерение скорости убывания разности скоростей вращения первичного и вторичного валов (ν) и определяется пороговая величина разности скоростей, при которой необходимо подавать сигнал на включение передачи, из выражения: νtвкл+25, где tвкл - время включения передачи, 25 - constant.
7. После достижения пороговой разности скоростей выдается сигнал на включение передачи.
Синхронизация первичного и вторичного валов при управлении двигателем по информационному каналу выполняется при движении автомобиля после перевода КП 3 в положение N следующим образом:
1. Производится измерение скорости (fв) вторичного вала и вычисление требуемой скорости (fт) первичного вала с учетом передаточного числа (ki) включаемой передачи (i)-fт=fв*ki.
2. В системе управления 27 двигателем передается сообщение с указанием требуемой скорости вращения fт двигателя 26.
3. Производится измерение скорости вращения (fп) первичного вала и определяется момент выполнения соотношения fп-fт≤25. После выполнения указанного соотношения выдается сигнал на включение передачи.
Микроконтроллер 5 предназначен для обработки данных, считанных с датчиков 19, 20, 23, 28, 38. 41, 42, 43, выдачи управляющих воздействий на ЭПК 21, 22, 31, 32, 37, 40, вывода на блок индикации 14 и в сеть CAN статусной и диагностической информации, диагностики цепей ЭПК, приема и обработки сообщений сети CAN в соответствии со стандартами SAE J1 939. Микроконтроллер может быть реализован на микросхеме Fujitsu F2МС - 16LX MB90F497GPFM.
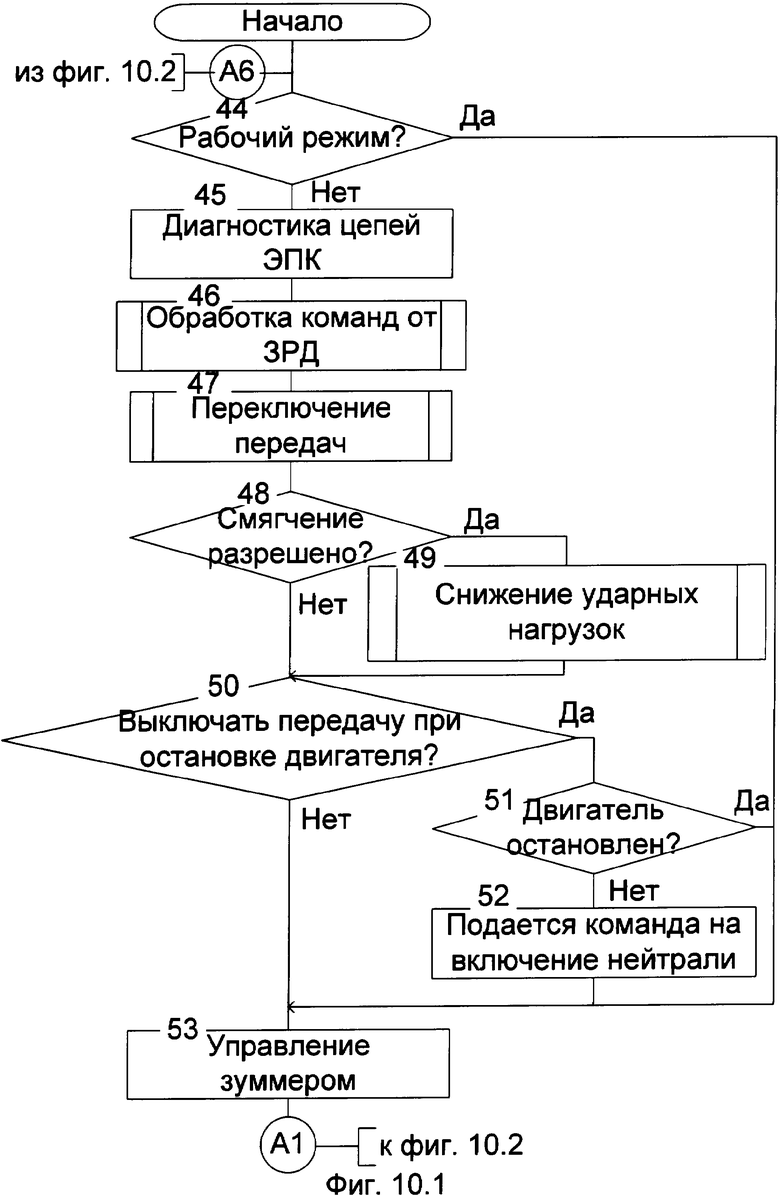
Пример работы микроконтроллера 5 в режиме «Ручное управление» представлен на фиг.10.1, 10.2, 11.1, 11.2, 11.3, 12.1, 12.2, 13.1. Блоки на фиг.10.1, 10.2 имеют следующее назначение:
44. Проверяется, находится ли устройство управления в рабочем режиме, т.е. может ли устройство обеспечивать переключение передач.
45. Производится диагностика цепей ЭПК на обрыв и КЗ.
46. Вызывается процедура, обеспечивающая обработку команд от ЗРД (работа процедуры приведена на фиг.10.1).
47. Вызывается процедура, обеспечивающая переключение передач (работа процедуры приведена на фиг.10.1).
48. Проверяется необходимость снижения ударных нагрузок (это задано в исходных данных, указанных при сборке конкретного привода).
49. Вызывается процедура, обеспечивающая снижение ударных нагрузок (работа процедуры приведена на фиг.10.1).
50. Проверяется необходимость выключения передачи при остановке двигателя (это задано в исходных данных, указанных при сборке конкретного привода).
51. Проверяется, остановлен ли двигатель.
52. Выдается команда на выключение передачи.
53. Вызывается функция управления зуммером (звуковой сигнализацией).
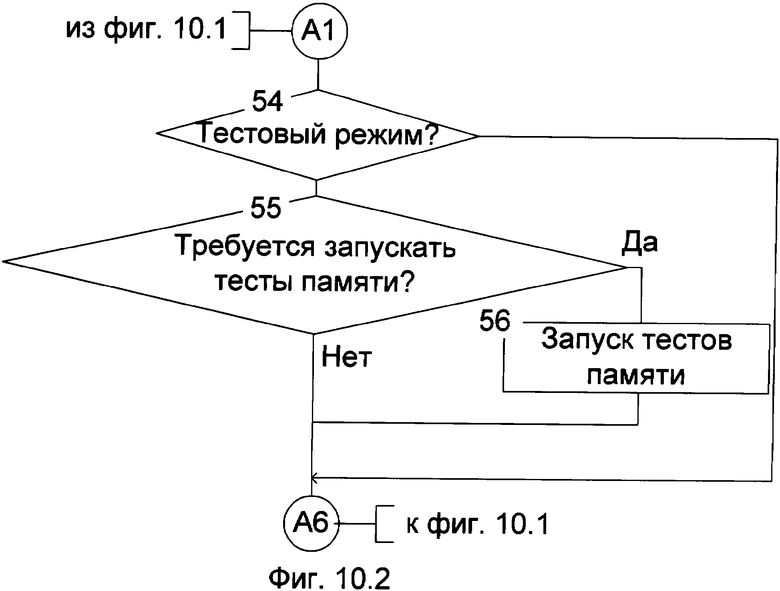
54. Проверяется, находится ли устройство управления в тестовом режиме (см. фиг.10.2).
55. Проверяется необходимость запуска тестов.
56. Запускается процедура выполнения тестов энергонезависимой памяти.
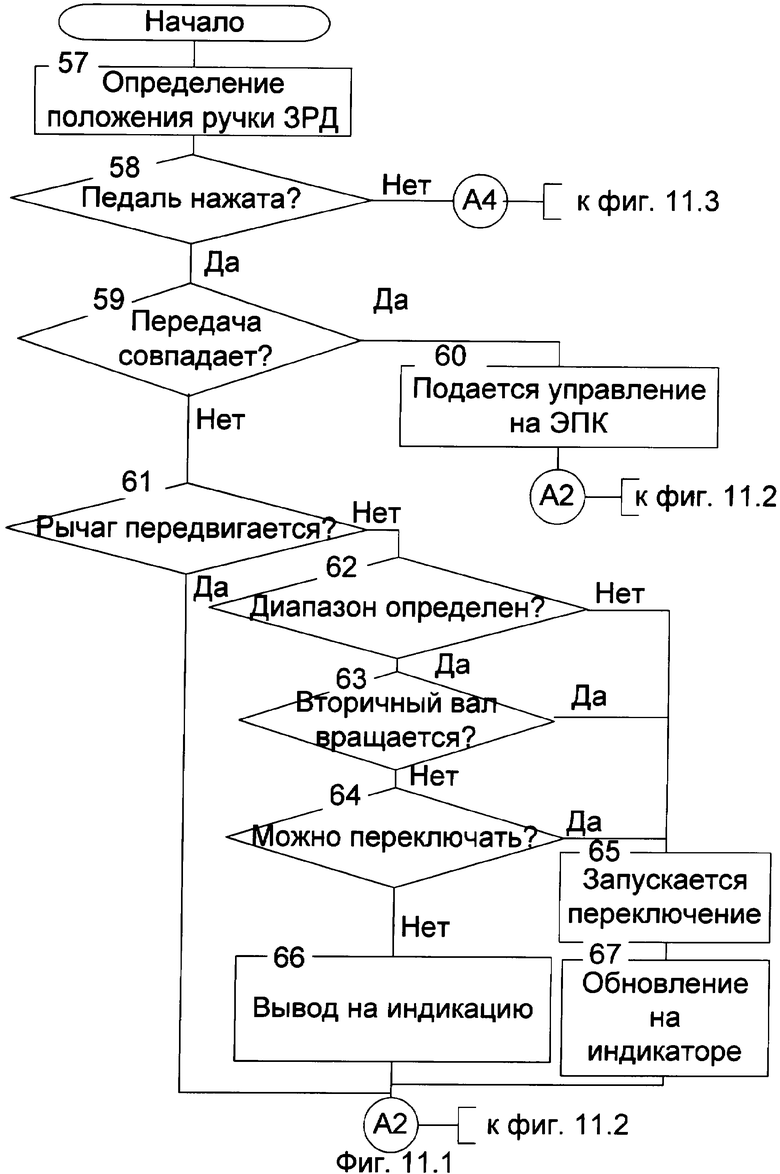
Блоки на фиг.11.1, 11.2, 11.3 имеют следующее назначение:
57. Определяется местоположение ручки ЗРД, т.е. определяется заказанная передача.
58. Проверяется, нажата ли педаль сцепления.
59. Проверяется, совпадает ли выбранная на ЗРД передача с включенной на КП.
60. Подается управление на ЭПК, обеспечивающее переключение передач таким образом, чтобы удержать включенной именно эту передачу.
61. Проверяется, передвигается ли сейчас рычаг механизма автоматизированного переключения передач.
62. Проверяется, с любых ли передач может стартовать привод.
63. Проверяется наличие вращения вторичного вала.
64. Проверяется, можно ли стартовать с заказанной передачи.
65. Выдается команда на включение заказанной передачи.
66. На блок индикации выводится сигнализация о попытке старта с передачи, с которой старт запрещен.
67. На блок индикации прекращается вывод сигнализации о попытке старта с передачи, с которой старт запрещен.
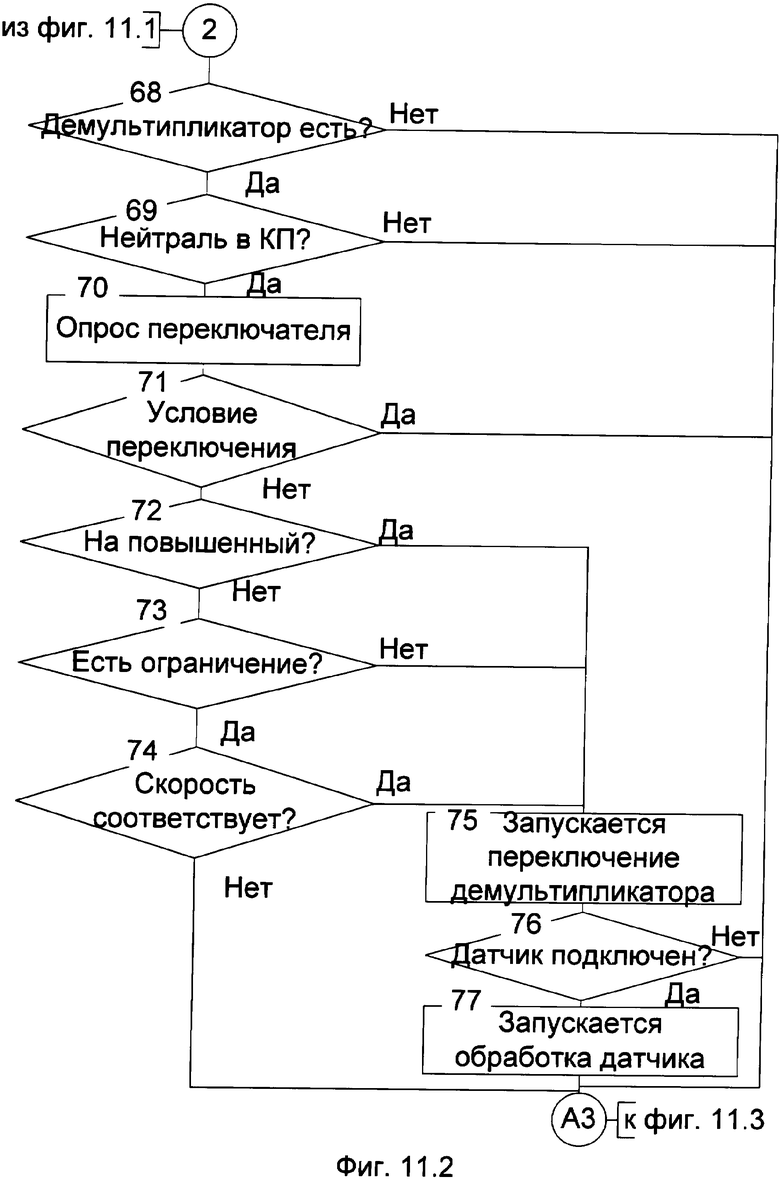
68. Проверяется наличие демультипликатора (это задано в исходных данных, указанных при сборке конкретного привода).
69. Проверяется, находится ли КП в нейтральном положении.
70. Считывается положение тумблера органов управления 17 «переключатель демультипликатора».
71. Проверяется, совпадает ли запрошенный с тумблера органов управления 17 «переключатель демультипликатора» диапазон с включенным на КП.
72. Проверяется необходимость переключения на повышенный диапазон.
73. Проверяется, есть ли ограничение по скорости привода при переключении на пониженный диапазон (это задано в исходных данных, указанных при сборке конкретного привода).
74. Проверяется, меньше ли скорость привода граничного значения (это задано в исходных данных, указанных при сборке конкретного привода).
75. Подается управление на электропневмоклапаны демультипликатора, чтобы переключить его на нужный диапазон.
76. Проверяется, подключен ли датчик демультипликатора, показывающий статус переключения (это задано в исходных данных, указанных при сборке конкретного привода).
77. Запускается процедура обработки сигнала с датчика демультипликатора.
78. Проверяется наличие делителя (это задано в исходных данных, указанных при сборке конкретного привода).
79. Считывается положение тумблера органов управления 17 «переключатель делителя».
80. Проверяется, соответствует ли положение тумблера органов управления 17 «переключатель делителя» включенному диапазону на КП.
81. Подается управление на электропневмоклапаны делителя, чтобы переключить его на нужный диапазон.
82. Запускается таймер на заданное время (это задано в исходных данных, указанных при сборке конкретного привода), по завершению которого гарантировано завершение переключения делителя и может быть снято питание с электропневмоклапанов.
83. Проверяется, идет ли третий этап переключения, т.е. включение передачи.
84. Выдается команда на выключение передачи.
85. Проверяется, нажата ли кнопка органов управления 17 «аварийная нейтраль».
86. Проверяется, находится ли КП в нейтральном положении.
87. Выдается команда на выключение передачи.
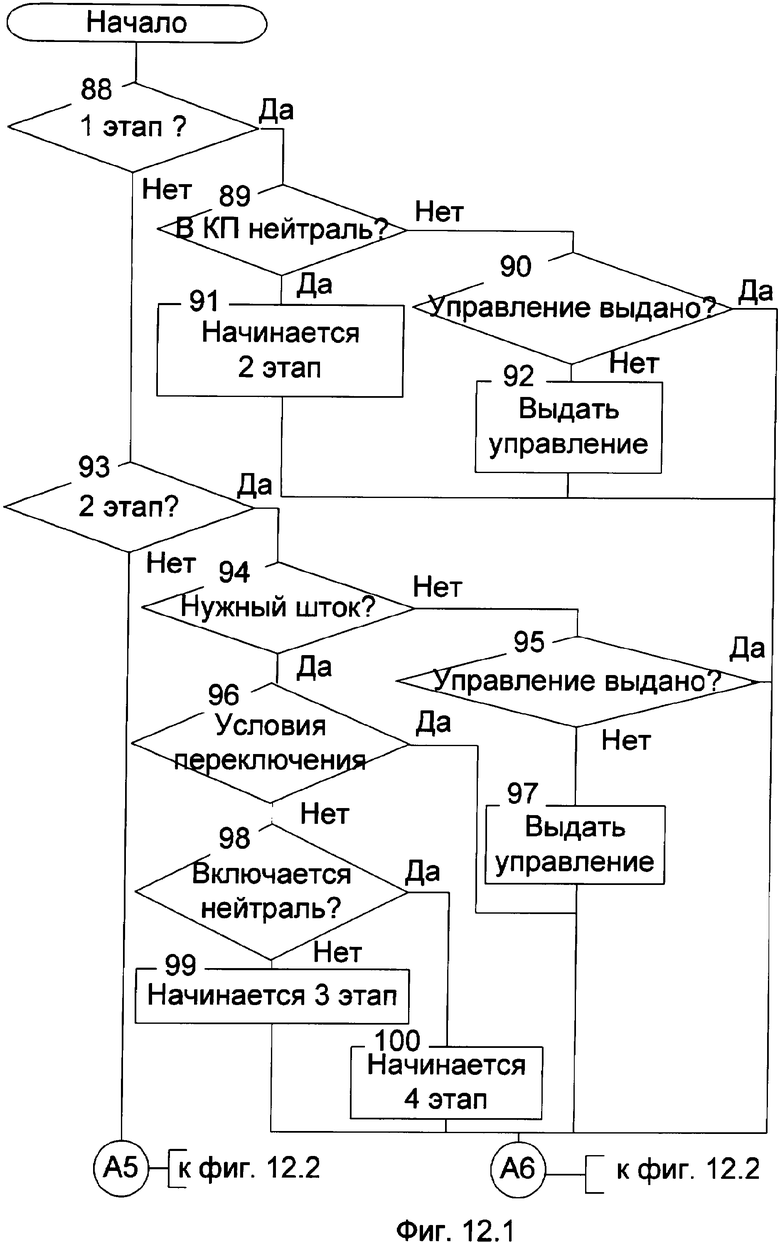
Блоки на фиг.12.1, 12.2 имеют следующее назначение:
88. Проверяется, идет ли первый этап переключения, т.е. выключение передачи.
89. Проверяется, находится ли КП в нейтральном положении.
90. Проверяется, выдано ли управление на электропневмоклапаны цилиндров включения передач 21, обеспечивающие переключение КП в нейтральное положение.
91. Производится переход на второй этап переключения.
92. Производится выдача управления на электропневмоклапаны 21, обеспечивающие переключение КП в нейтральное положение.
93. Проверяется, идет ли второй этап переключения.
94. Проверяется, находится ли рычаг механизма автоматизированного переключения передач 18 напротив нужного штока в КП.
95. Проверяется, выдано ли на электропневмоклапаны 22 управление, обеспечивающее выбор нужного штока в КП.
96. Проверяется, переключается ли демультипликатор.
97. Производится выдача управления на электропневмоклапаны 22, обеспечивающего перемещение рычага механизма автоматизированного переключения передач 18 к нужному штоку.
98. Проверяется, нейтраль ли заказанная передача.
99. Производится переход на третий этап переключения.
100. Производится переход на четвертый этап переключения.
101. Проверяется, идет ли третий этап переключения.
102. Проверяется, включена ли в КП заказанная на ЗРД передача.
103. Проверяется, выдано ли на электропневмоклапаны 21 управление, обеспечивающее включение заказанной на ЗРД передачи.
104. Производится переход на четвертый этап переключения.
105. Производится выдача управления на электропневмоклапаны 21, обеспечивающего включение заказанной на ЗРД передачи.
106. Проверяется необходимость снижения ударных нагрузок (это задано в исходных данных, указанных при сборке конкретного привода).
107. Проверяется, идет ли четвертый этап переключения.
108. Запускается таймер на время tc для первой фазы снижения ударных нагрузок («смягчения»), производится переход на первую фазу «смягчения».
109. Проверяется, сработал ли датчик положения сцепления 23.
110. Проверяется, зафиксирована ли неисправность в цепях ЭПК.
111. Производится переход на первый этап переключения.
112. Снимается питание с электропневмоклапанов 21 и 22, осуществляющих переключение передач.
Блоки на фиг.13.1 имеют следующее назначение:
113. Проверяется, идет ли третий этап переключения.
114. Завершается процедура «Смягчение».
115. Проверяется, идет ли первая фаза «смягчения».
116. Проверяется, прошло ли время tc с начала третьего этапа переключения.
117. Производится выдача встречного импульса для «смягчения» удара по механическим синхронизаторам КП, первая фаза «смягчения» завершается.
118. Проверяется, началось ли перемещение рычага механизма автоматизированного переключения передач 18 в сторону заказанной передачи.
119. Производится корректировка времени tc.
120. Проверяется, разрешена ли вторая фаза «смягчения» (это задано в исходных данных, указанных при сборке конкретного привода).
121. Запускается таймер на время tш, производится переход во вторую фазу «смягчения».
122. Проверяется, идет ли вторая фаза «смягчения».
123. Проверяется, прошло ли время tш с момента срыва с нейтрали.
124. Производится выдача серии встречных импульсов для «смягчения» удара по шестерне.
125. Завершается процедура «Смягчение».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015937C1 |
| Система управления скоростью движения транспортного средства | 1987 |
|
SU1537575A1 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
| Система управления составной коробкой передач транспортного средства | 1990 |
|
SU1710377A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170678C1 |
| Система управления работой автомобильного дизеля в динамическом режиме самостоятельного холостого хода | 2019 |
|
RU2702445C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |








Изобретение относится к вычислительной технике и может найти применение в устройствах управления электропневматическим приводом коробок передач в приводах машин и механизмов, в частности в автомобильной технике, в оборудовании для бурения грунта или горных пород. Технический результат при использовании данного изобретения заключается в повышении ресурса работы коробки передач, повышении быстродействия переключения передач и повышении безопасности движения. Устройство содержит микроконтроллер (5), интерфейс датчиков (6), интерфейс задатчика режимов движения (7), интерфейс цифрового канала (8), таймер (9), интеллектуальные ключи (10), перепрограммируемое энергонезависимое запоминающее устройство (11), блок питания (12), интерфейс блока индикации (13). 15 з.п. ф-лы, 13 ил.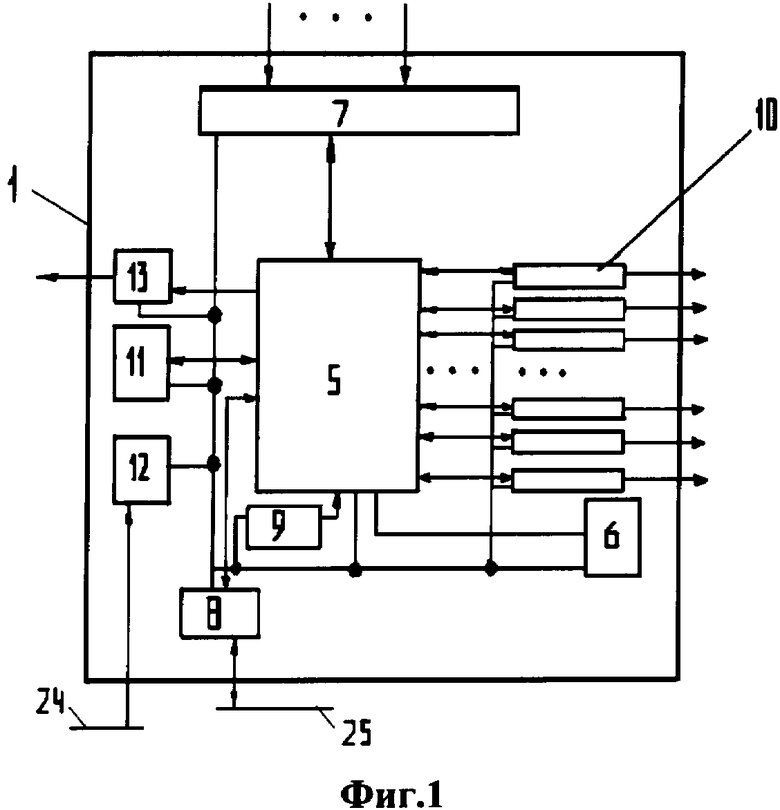
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
| Система автоматического управления ступенчатой коробкой передач транспортной машины | 1975 |
|
SU621601A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015937C1 |
| Устройство автоматического переключения передач трансмиссии транспортного средства | 1978 |
|
SU952094A3 |
| JP 60143132, 29.07.1985 | |||
| JP 61257332, 14.11.1986. | |||

