Изобретение относится к вычислительной технике, может найти применение в системах управления электропневматическим приводом механической ступенчатой коробки передач и может быть использовано в приводах машин и механизмов, в частности, в автомобильной технике, в оборудовании для бурения грунта или горных пород и т.п. и т.д.
Известна система командного управления коробкой передач (см. патент РФ № 2010732, МКИ 5 В60К 20/00, опубл. 15.04.1994 г., по заявке № 5023308/27, патентообладатель Белорусская государственная политехническая академия), содержащая контроллер, реле, электрогидравлические распылители, цилиндр включения передач, цилиндр выбора передач, распределитель переключения передач, кольцевые поршни, полый поршень.
Признаком аналога, совпадающим с признаком заявляемого технического решения, является контроллер.
Причинами, препятствующими достижению заявляемого технического результата, являются низкая надежность устройства в связи с отсутствием контроля цепей электроклапанов при проведении переключения передач и отсутствие возможности организации многопультовой системы управления.
Известно устройство дистанционного переключения передач в механической ступенчатой коробке передач (см. пат. РФ № 2015937, МКИ 5 В60К 20/00, опубл. 15.07.1994 г., заявитель и патентообладатель Паршин Н.Е. и др.), содержащее управляющий логический электронный блок, включающий процессор, регистр управления ключами электропневмоклапанов, интерфейс датчиков, регистр управления блоком индикации и интерфейс, причем управляющий логический электронный блок соединен электрическим кабелем с задатчиком режимов движения, управляющий логический электронный блок электрически связан с блоком индикации, запитан от блока питания и размещен на коробке передач, на которой закреплен также механизм автоматизированного переключения передач с электропневмоклапанами и датчиками.
Признаки аналога, совпадающие с признаками заявляемого технического решения, следующие: микроконтроллер, интерфейс датчиков.
Причинами, препятствующими достижению заявляемого технического результата, являются отсутствие возможности организации многопультовой системы управления коробкой передач, отказы дистанционного устройства управления механической ступенчатой коробкой передач, обусловленные помехами, возникающими от внешних электромагнитных полей и при включении внутренних потребителей электрооборудования ввиду малости токов, действующих в указанных линиях связи, и наличие большой длины электрических линий связи между управляющим логическим электронным блоком, электропневмоклапанами и датчиками, и как следствие этого - низкая надежность.
Наиболее близким аналогом к заявляемому изобретению является устройство управления электропневматичсским приводом механической ступенчатой коробки передач (решение о выдаче патента на изобретение от 28.11.2007 года по заявке № 2006125894/09 (028088) от 17.07.2006 года, патентообладатель Открытое акционерное общество «Научно-конструкторское бюро вычислительных систем»), содержащее микроконтроллер, соединенный с интерфейсом датчиков и интерфейсом задатчика режимов движения, интерфейс цифрового канала, таймер, интеллектуальные ключи, перепрограммируемое энергонезависимое запоминающее устройство, блок питания, интерфейс блока индикации, причем электропневматический привод механической ступенчатой коробки передач привода содержит блок индикации, задатчик режимов движения, установленный на коробке передач, механизм автоматизированного переключения передач с датчиками включения передач, датчиками выбора штока, двумя электропневмоклапанами цилиндров включения передач и двумя электропневмоклапанами цилиндров выбора штока, датчик положения сцепления, причем микроконтроллер, предназначенный для обработки данных, считанных с датчиков, выдачи управляющих воздействий на электропневмоклапаны, вывода на блок индикации и в сеть по цифровому каналу статусной и диагностической информации, диагностики цепей электропневмоклапанов, приема и обработки сообщений сети по цифровому каналу, соединен с интеллектуальными ключами, интерфейсом блока индикации, перепрограммируемым энергонезависимым запоминающим устройством, блоком питания, таймером и интерфейсом цифрового канала, интерфейс задатчика режимов движения соединен с интерфейсом блока индикации, перепрограммируемым энергонезависимым запоминающим устройством, блоком питания, интерфейсом цифрового канала, таймером, интерфейсом датчиков и интеллектуальными ключами, интерфейс датчиков соединен с датчиками включения передач, датчиками выбора штока и датчиком положения сцепления, вход интерфейса задатчика режимов движения, содержащего датчики выбора передач и органы управления, предназначенные для задания переключения передач, вход блока питания соединен с выходом внешнего источника питания, вход/выход интерфейса цифрового канала соединен с цифровым каналом, по которому подается статусная и диагностическая информация к/от системы управления двигателем, выход интеллектуальных ключей связан со входом электропневмоклапанов привода, посредством которых происходит управление приводом согласно управляющим командам микроконтроллера, выход интерфейса блока индикации соединен со входом блока индикации.
Признаки аналога, совпадающие с признаками заявляемого технического решения, следующие: микроконтроллер, интерфейс датчиков, интеллектуальные ключи, перепрограммируемое энергонезависимое запоминающее устройство, блок питания, интерфейс цифрового канала, таймер, цифровой канал.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие независимых систем управления в задатчике режимов движения и в коробке передач, позволяющих устанавливать произвольное количество пультов управления и организовывать их бесконфликтную одновременную работу.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении надежности, помехоустойчивости и организации многопультового управления режимами работы коробки передач.
Технический результат, обеспечиваемый при реализации заявляемого технического решения, заключается в осуществлении взаимодействия электронного модуля управления манипулятора с электронным блоком управления коробкой передач по цифровому каналу обмена информацией, сокращении длины линии электрических связей между указанными блоками и соединенными с ними узлами, снижении вероятности появления электрических помех от внешних электромагнитных полей и внутренних электрических потребителей, например, автомобиля благодаря высокой надежности и помехоустойчивости цифровой линии связи, повышающей тем самым надежность устройства.
Организация взаимодействия задатчиков режимов движения с электронным блоком управления коробкой передач по цифровому каналу обмена информацией ведет к организации многопультового управления режимами работы коробки передач за счет установки электронного модуля управления манипулятора в задатчике режимов движения.
Для достижения указанного технического результата в систему управления электропневматическим приводом механической ступенчатой коробки передач привода, содержащую электронный блок управления коробкой передач, содержащий микроконтроллер, соединенный с интерфейсом датчиков, интерфейсом цифрового канала, блоком питания, перепрограммируемым энергонезависимым запоминающим устройством, интеллектуальными ключами, таймером, причем блок питания соединен с интеллектуальными ключами, перепрограммируемым энергонезависимым запоминающим устройством, интерфейсом датчиков и интерфейсом цифрового канала, введен электронный модуль управления манипулятора, содержащий микроконтроллер, соединенный с интерфейсом задатчика режимов движения, интерфейсом блока индикации, интерфейсом цифрового канала и блоком питания, причем интерфейс цифрового канала соединен с блоком питания, интерфесом задатчика режимов движения и интерфейсом блока индикации, причем электронный модуль управления манипулятора соединен с электронным блоком управления коробкой передач посредством цифрового канала обмена информацией.
Электропневматический привод механической ступенчатой коробки передач привода содержит, по меньшей мере, блок индикации, задатчик режимов движения, датчик положения сцепления, механизм автоматизированного переключения передач с датчиками включения передач, датчиками выбора штока, двумя электропневмоклапанами цилиндров включения передач и двумя электропневмоклапанами цилиндров выбора штока, причем механизм автоматизированного переключения передач установлен на коробке передач, входы интерфейса датчиков электронного блока управления коробкой передач соединены с выходами датчиков включения передач, выбора штока и датчика положения сцепления, выходы интеллектуальных ключей электронного блока управления коробкой передач соединены со входами электропневмоклапанов цилиндров включения передач и цилиндров выбора штока, объединенные входы питания датчиков выбора штока, включения передач и датчика положения сцепления соединены с блоком питания электронного блока управления коробкой передач, вход блока питания электронного блока управления коробкой передач и вход блока питания электронного модуля управления манипулятора соединены с сетью электропитания, интерфейс задатчика режимов движения электронного модуля управления манипулятора соединен с датчиками выбора передач и органами управления задатчика режимов движения, электронный модуль управления манипулятора соединен с электронным блоком управления коробкой передач посредством цифрового канала обмена информацией, электронный модуль управления манипулятора размещен в задатчике режимов движения.
Привод может содержать, по меньшей мере, двигатель, соединенный с механической ступенчатой коробкой передач через сцепление с механизмом управления сцеплением.
Двигатель может содержать, по меньшей мере, механизмы управления топливоподачей и торможением двигателя с электропневмоклапанами управления топливоподачей и торможением двигателя, входы которых соединены с выходами интеллектуальных ключей электронного блока управления коробкой передач.
На механизме управления сцеплением может быть размещен электропневмоклапан управления сцеплением, вход которого соединен с одним из выходов интеллектуальных ключей электронного блока управления коробкой передач.
Механическая ступенчатая коробка передач может содержать делитель, управляемый двумя электропневмоклапанами, входы которых соединены с выходами интеллектуальных ключей электронного блока управления коробкой передач.
Механическая ступенчатая коробка передач может содержать датчик состояния делителя, выход которого соединен с одним из входов интерфейса датчиков электронного блока управления коробкой передач.
Механическая ступенчатая коробка передач может содержать демультипликатор, управляемый двумя электропневмоклапанами и датчик состояния демультипликатора, выход которого соединен с одним из входом интерфейса датчиков электронного блока управления коробкой передач, причем выходы интеллектуальных ключей электронного блока управления коробкой передач соединены со входами электропневмоклапанов демультипликатора.
Механическая ступенчатая коробка передач может содержать датчик частоты вращения первичного вала, выход которого соединен с одним из входов интерфейса датчиков электронного блока управления коробкой передач.
Механическая ступенчатая коробка передач может содержать датчик частоты вращения вторичного вала, выход которого соединен с одним из входов интерфейса датчиков электронного блока управления коробкой передач.
В качестве датчиков частоты вращения первичного и вторичного валов могут быть использованы контрольные и/или измерительные приборы.
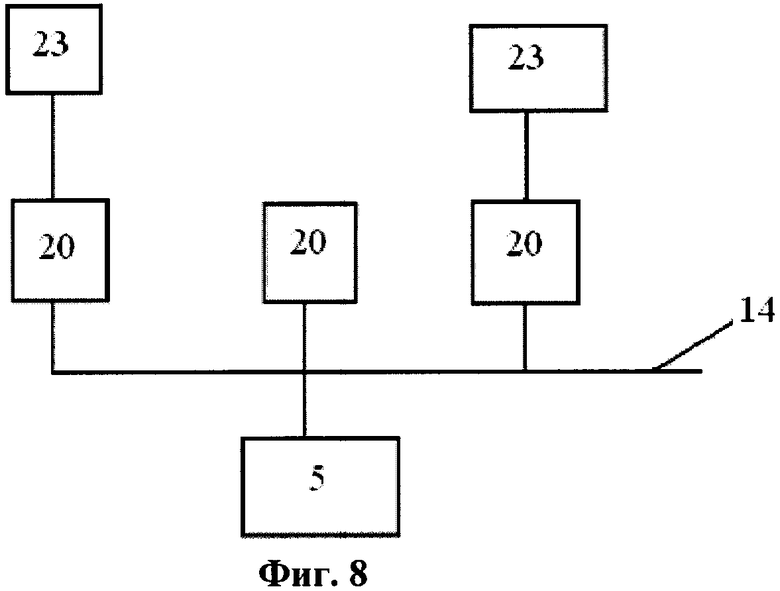
Система может содержать n задатчиков режимов движения и m блоков индикации, где n=1,…,N; m=0,…,M. Количество блоков индикации в этом варианте может быть не более количества задатчиков режимов движения, установленных в системе, т.е. n≥m.
В качестве цифрового канала обмена информацией можно использовать интерфейс CAN.
Под приводом в технике понимают устройство, состоящее из источника энергии, передающих механизмов и аппаратуры управления, служащее для приведения в движение машин и механизмов. Источником энергии является двигатель (тепловой, электрический, пневматический, гидравлический и др.) или устройство, отдающее заранее накопленную механическую энергию (пружинный, гиревой механизм и др.). В некоторых случаях привод осуществляется за счет мускульной силы, например в ручных лебедках, бытовых и других механизмах и машинах (швейных машинах, велосипедах и т.п.). По назначению привод разделяют на стационарный (наиболее распространен электрический привод), передвижной на движущихся рабочих машинах (главным образом, с тепловыми двигателями), транспортный, применяемый на различных транспортных средствах (см. Новый политехнический словарь под редакцией А.Ю.Ишлинского; М.: Научное издательство «Большая Российская энциклопедия», 2000, стр.415).
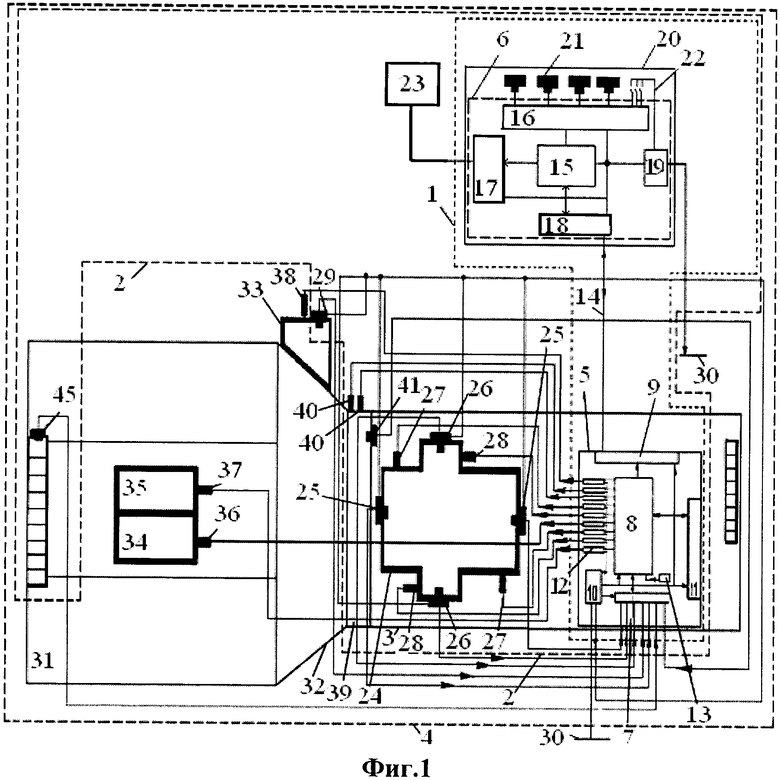
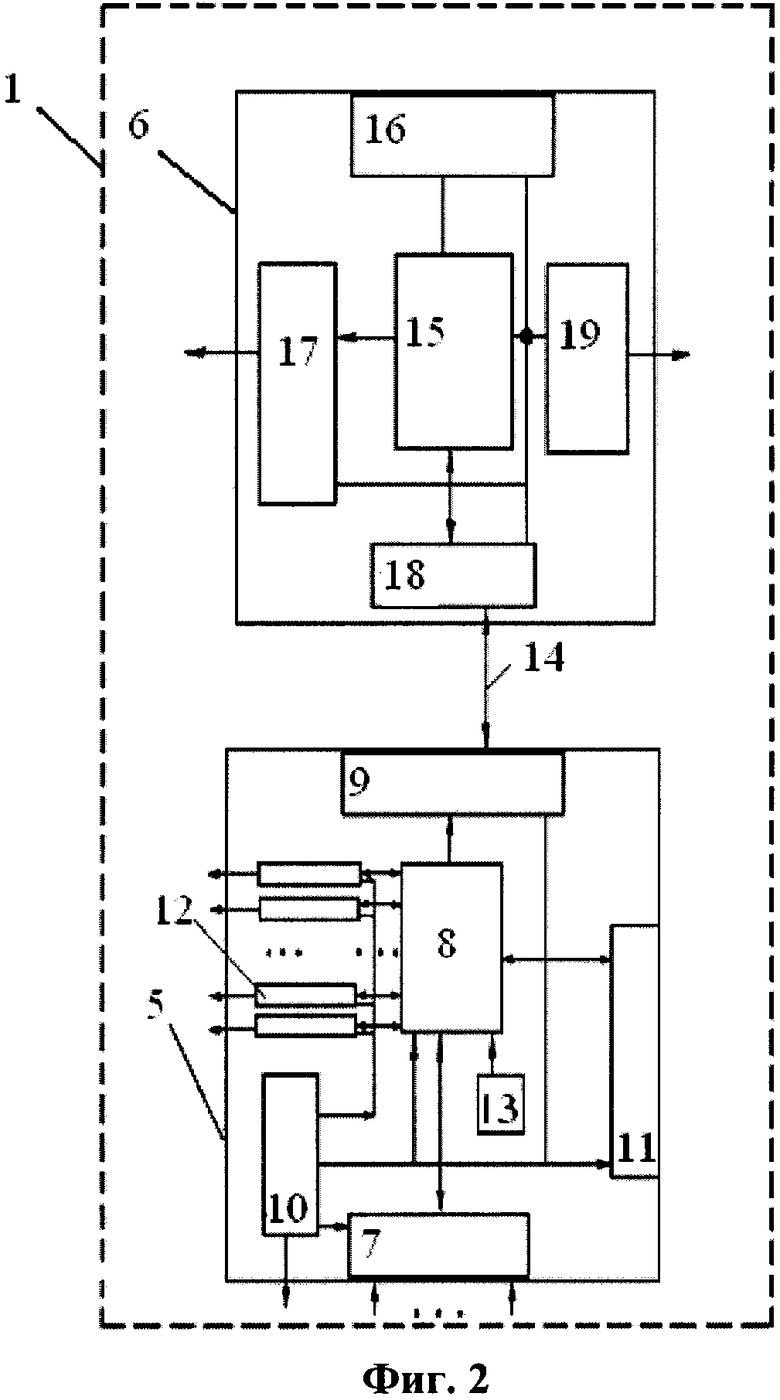
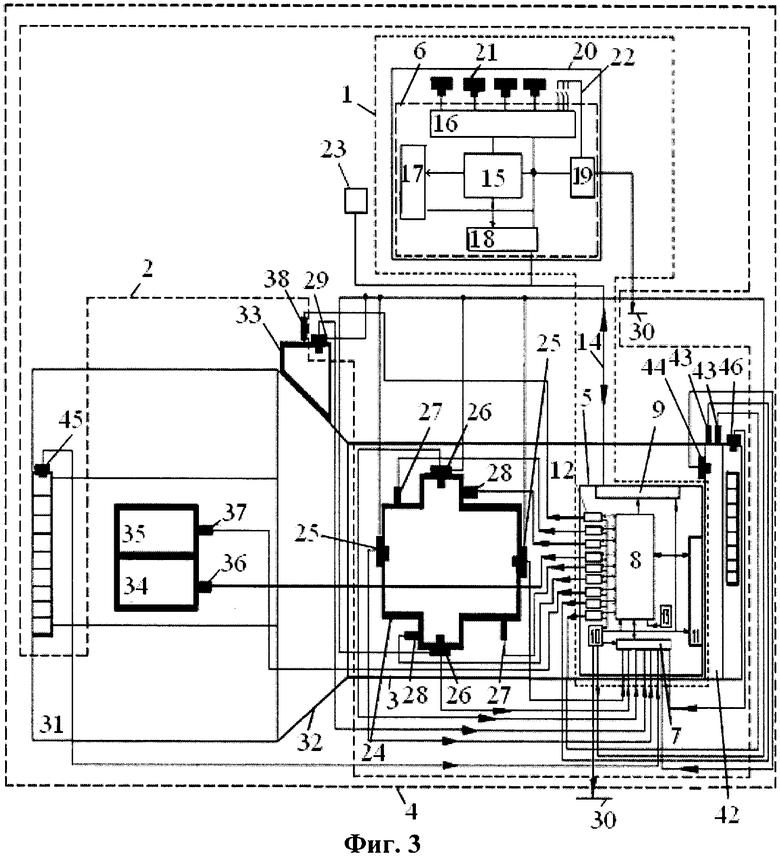
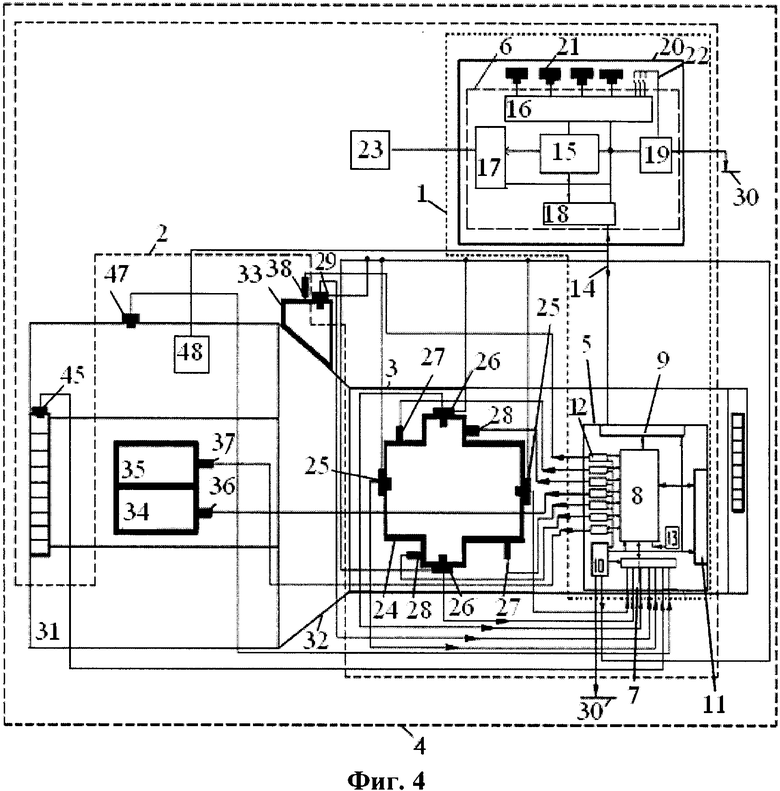
Сущность изобретения, его реализуемость и промышленная применимость поясняются чертежами (фиг.1-13), где на фиг.1 представлена примерная схема привода, например, для автомобиля с делителем и с системой управления электропневматическим приводом механической ступенчатой коробки передач, на фиг.2 представлена схема системы управления электропневматическим приводом механической ступенчатой коробки передач, состоящая из электронного блока управления коробкой передач и электронного модуля управления манипулятора, на фиг.3 представлена примерная схема привода, например, для автомобиля с демультипликатором и с системой управления электропневматическим приводом механической ступенчатой коробки передач, на фиг.4 представлена примерная схема привода, например, для автомобиля с системой управления двигателем и с системой управления электропневматическим приводом механической ступенчатой коробки передач, на фиг.5 представлена возможная схема переключения передач на задатчике режимов движения для реализации полуавтоматического режима управления механической ступенчатой коробкой передач, на фиг.6 представлена возможная схема переключения передач на задатчике режимов движения для реализации автоматического и полуавтоматического режима управления механической ступенчатой коробкой передач, на фиг.7 - упрощенная схема переключения передач задатчика режимов движения для реализации автоматического и полуавтоматического режима управления механической ступенчатой коробкой передач, на фиг.8 представлена примерная схема, когда система может содержать несколько задатчиков режимов движения и несколько блоков индикации, на фиг.9, 10.1, 10.2, 11.1, 11.2, 11.3, 12.1, 12.2, 13 приведен алгоритм работы микроконтроллера 15 в режиме «Ручное управление».
Система управления 1 электропневматическим приводом 2 механической ступенчатой коробки передач 3 привода 4 (пример приведен для привода автомобиля), которая содержит электронный блок управления коробкой передач 5 и электронный модуль управления манипулятора 6. Электронный блок управления коробкой передач 5 содержит интерфейс датчиков 7, микроконтроллер 8, интерфейс цифрового канала 9, блок питания 10, перепрограммируемое энергонезависимое запоминающее устройство 11, интеллектуальные ключи 12, таймер 13. Электронный блок управления коробкой передач 5 соединен с электронным модулем управления манипулятора 6 посредством цифрового канала 14 обмена информацией. Электронный модуль управления манипулятора 6 содержит микроконтроллер 15, интерфейс задатчика режимов движения 16, интерфейс блока индикации 17, интерфейс цифрового канала 18, блок питания 19 (см. фиг.1, 2).
На фиг.1 показаны задатчик режимов движения 20, который содержит датчики выбора передач 21 и органы управления 22 (органы управления представляют собой тумблеры и кнопки), блок индикации 23, механизм автоматизированного переключения передач 24 с датчиками 25 включения передач, датчиками 26 выбора штока, двумя электропневмоклапанами 27 цилиндров включения передач и двумя электропневмоклапанами 28 цилиндров выбора штока, датчик 29 положения сцепления, сеть электропитания 30.
Также на фиг.1, 3, 4 показаны двигатель 31, сцепление 32, механизм управления сцеплением 33, механизмы управления 34, 35 топливоподачей и торможением двигателя с электропневмоклапанами 36, 37 управления топливоподачей и торможением двигателя соответственно, электропневмоклапан 38 управления сцеплением, делитель 39, управляемый двумя электропневмоклапанами 40, датчик состояния делителя 41, демультипликатор 42, управляемый двумя электропневмоклапанами 43, и датчик состояния демультипликатора 44, датчик частоты вращения 45 первичного вала и датчик частоты вращения 46 вторичного вала, датчик уровня цикловой подачи топлива 47, система управления двигателем 48.
Система управления 1 электропневматическим приводом механической ступенчатой коробки передач работает следующим образом. Переключение передач в системе управления электропневматическим приводом коробки передач производится при подаче команды от задатчика режимов движения 20 через интерфейс задатчика режимов движения 16 к микроконтроллеру 15 электронного модуля управления манипулятора 6, через интерфейс цифрового канала 18 по цифровому каналу обмена информацией 14 к электронному блоку управления коробкой передач 5, через интерфейс цифрового канала 9 к микроконтроллеру 8 электронного блока управления коробкой передач 5, который, обрабатывая информацию, управляет через интеллектуальные ключи 12 электропневмоклапанами (ЭПК) 27, 28, 36, 37, 38 (см. фиг.1, 3, 4), ЭПК 43 (фиг.3), ЭПК 40 (см. фиг.1). С целью повышения безопасности движения перед началом движения и при каждом переключении передачи производится контроль цепей управления всех ЭПК с помощью интеллектуальных ключей 12 и, в случае обнаружения неисправности, выдается из электронного блока управления коробкой передач 5 по цифровому каналу обмена информацией 14 через электронный модуль управления манипулятора 6 на блок индикации 23 номер неисправного ЭПК, а дальнейшее переключение передач запрещается. Микроконтроллер 15 через интерфейс блока индикации 17 или цифровой канал 14 выдает информацию о включенной передаче и диагностическую информацию на блок индикации 23.
Многопультовое управление может осуществляться, когда в задатчике режимов движения 20 находится электронный модуль управления манипулятора 6, взаимодействующий с электронным блоком управления коробкой передач по цифровому каналу обмена информацией; тогда система может содержать n задатчиков режимов движения и m блоков индикации. Все задатчики режимов движения и электронный блок управления коробкой передач 5 в этом случае подключаются к одному цифровому каналу обмена информацией 14 (см. фиг.8).
Датчик выбора штока 26 (координата Y) определяет номер штока, с помощью которого включена передача. Значение «10» определяет первый шток, «00» - второй шток, «01» - третий шток и «11» - запрещенная комбинация, говорящая о неисправности датчика (не показано). Установка второго датчика выбора штока 26 дает возможность установить номер передачи, которая включена. Номера передач, включаемых конкретным штоком, зависят от типа используемой коробки. Датчик включения передачи 25 (координата X) определяет номер включенной передачи и состояние перехода. Значения «10» и «01» определяют одну из двух включаемых данным штоком передач. Значение «11» определяет нахождение коробки передач 3 в нейтральном положении. Значение «00» определяет процесс включения или выключения передачи. Датчик включения передач Х 25 позволяет управлять коробкой передач 3, обеспечивая повышение ресурса работы коробки передач 3.
Датчики выбора передач 21 на задатчике режимов движения 20 определяют номер передачи, которую необходимо включить в коробке передач 3. Конструкция и работа датчиков зависят от выбранной схемы переключения и режима работы системы управления коробкой передач (фиг.5, 6, 7).
Датчики частоты вращения 45, 46 соответственно первичного и вторичного валов (импульсные датчики) выдают в единицу времени такое количество импульсов, которое пропорционально угловой скорости вращения соответственно первичного и вторичного валов (не показано). Датчик 45 частоты вращения первичного вала выдает импульсы с большей частотой (в 5-10 раз), чем датчик 46 частоты вращения вторичного вала. Это необходимо для обеспечения большей точности выравнивания скоростей при центральной синхронизации. Датчик 44 состояния демультипликатора - датчик, определяющий состояние демультипликатора 42. Датчик 44 выключен (обрыв цепи) при стационарном состоянии демультипликатора 42. Датчик 44 включен на землю (минус аккумуляторной батареи) в процессе переключения. Такая работа датчика 44 особенно важна для демультипликатора 42, переключение которого должно производиться в выключенном (нейтральном) состоянии коробки передач 3.
Датчик положения сцепления 29 указывает состояние полностью выключенного сцепления 32. Сигнал выключенного сцепления необходим системе управления 1 электропневматическим приводом (2) коробки передач (3) для запуска процессов переключения передач.
Датчик 47 уровня цикловой подачи топлива (датчик положения педали акселератора) (см. фиг.4) указывает уровень нагрузки двигателя 31. Сигнал с этого датчика необходим для автоматического определения момента переключения передач.
Задатчик режимов движения 20 имеет клавишу запроса управления, а на блоке индикации 23 имеется две лампы - «управление предоставлено», «занято». Каждому задатчику режимов движения, установленному в системе, присвоен свой приоритет. При необходимости произвести управление от данного задатчика режимов движения на нем нажимается клавиша запроса управления. После зажигания лампы «управление предоставлено» управление может осуществляться только от данного задатчика режимов движения. Если горит лампа «занято» или не горит никакая лампа, то управление от данного задатчика режимов движения осуществляться не может.
Если горит лампа «занято», это означает, что управление предоставлено другому задатчику режимов движения. Если в этом состоянии будет нажата клавиша запроса управления и приоритет данного задатчика режимов движения выше, чем у того, кому предоставлено управление, то управление перейдет к данному задатчику режимов движения и загорится лампа «управление предоставлено». Если приоритет данного задатчика режимов движения ниже, чем у того, кому предоставлено управление, то управление к нему не перейдет.
Если не горит никакая лампа, это означает, что нет запросов на управление. Если при этом нажата клавиша запроса управления, то управление перейдет к данному задатчику режимов движения безусловно и загорится лампа «управление предоставлено».
Если горит лампа «управление предоставлено», то нажатие клавиши запроса управления означает отказ от управления. Все лампы погаснут.
После предоставления управления данному задатчику режимов движения управление осуществляется следующим образом.
Система управления 1 электропневматическим приводом механической ступенчатой коробки передач обеспечивает работу коробки передач 3 в трех режимах - ручном, полуавтоматическом и автоматическом.
В ручном режиме номер передачи и момент переключения определяются водителем. Работа системы управления 1 электропневматическим приводом коробки передач в ручном режиме производится следующим образом: задатчиком режимов движения (ЗРД) 20 устанавливается передача, в которую должна быть переведена коробка передач 3, а переключение производится по нажатию педали сцепления (не показано) (срабатыванию датчика 29 положения сцепления). Система управления 1 электропневматическим приводом механической ступенчатой коробки передач отрабатывает процедуру переключения (процедура переключения приведена ниже). Используется синхронизация с помощью механических синхронизаторов (не показано). ЗРД 20 имеет положения, аналогичные положениям механической ручки переключения передач (не показано).
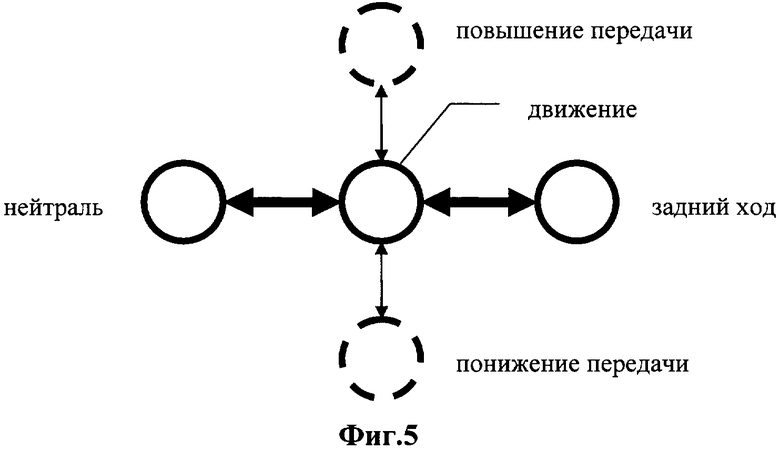
В полуавтоматическом режиме работы системы управления 1 электропневматическим приводом коробки передач момент и направление переключения передачи (повышение или понижение) определяет водитель, а система управления 1 электропневматическим приводом коробки передач определяет номер включаемой передачи и управляет процессом переключения передач, обеспечивая центральную синхронизацию. Параллельно педали сцепления (не показано) устанавливается механизм управления сцеплением 33, управляемый электропневмоклапаном 38 управления сцеплением. Педаль сцепления (не показано) может использоваться только при старте. Кроме того, для выполнения центральной синхронизации первичного и вторичного валов устанавливаются механизмы управления топливоподачей 34 и торможением 35 двигателя, управляемыми электропневмоклапанами 36, 37 управления топливоподачей и торможением двигателя соответственно. Если двигатель 31 оборудован системой управления 48 двигателя с цифровым каналом 14, то установка механизмов управления топливоподачей 34 и торможением 35 двигателя для выполнения центральной синхронизации не требуется. ЗРД 20 имеет следующие возможные положения (см. фиг.5):
- движение;
- повышение передачи;
- понижение передачи;
- нейтраль (N);
- задний ход.
Положения «повышение передачи» и «понижение передачи» не фиксированы. По включению ЗРД 20 в положение «повышение» или «понижение передачи» водитель определяет момент и направление переключения передач, после чего ЗРД 20 возвращается в среднее положение. Нейтраль имеет свое фиксированное положение.
При двукратном переводе ЗРД 20 в положение «повышение» или «понижение передачи» производится переключение соответственно через одну передачу вверх или вниз.
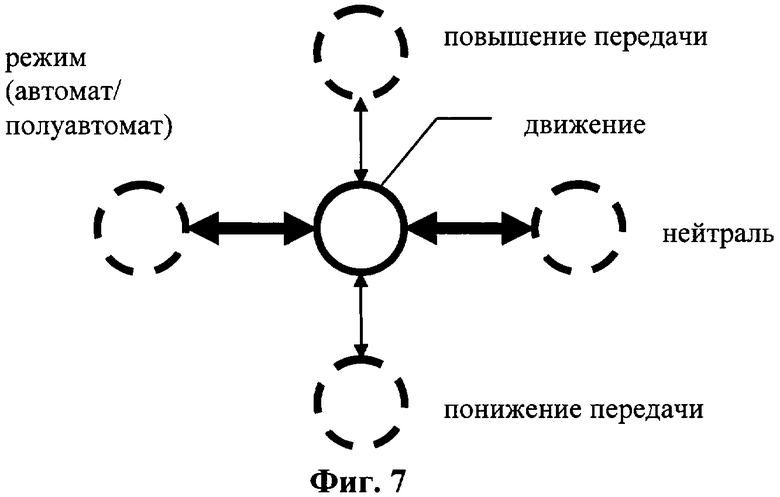
В автоматическом режиме устройство управления 1 электропневматическим приводом коробки передач работает следующим образом: передача и момент переключения определяются автоматически. Обязательное наличие механизмов для выполнения центральной синхронизации, аналогичных описанным выше (не показано), (пропорционального) электропневмоклапана 29 управления сцеплением, используемого при старте автомобиля, и датчика уровня цикловой подачи топлива (датчика положения педали акселератора) 47. ЗРД 20 имеет три основных положения - движение вперед, движение назад и нейтраль. Педаль сцепления в этом режиме не используется. Для обеспечения возможности работы как в режиме автоматического, так и в режиме полуавтоматического управления необходимо использовать ЗРД 20 со схемой состояний, представленной на фиг.6, либо с упрощенной схемой переключения, представленной на фиг.7. В последнем случае задний ход включается, если затребовано понижение передачи на неподвижном автомобиле (определяется по состоянию датчика частоты вращения вторичного вала 42). Для включения заднего хода, кроме соответствующей установки ЗРД (20), требуется дополнительное нажатие кнопки органов управления 22 «разрешение включения заднего хода» (органы управления представляют собой тумблеры и кнопки).
В режиме «Ручное управление» система управления 1 электропневматическим приводом коробки передач работает в соответствии со следующей процедурой:
1) По включению питания производится диагностика состояния коробки передач (КП) 3 и выдается на блок индикации 23 номер скорости, которая установлена на КП 3. С помощью интеллектуальных ключей 12 производится контроль цепей управления всех ЭПК и, в случае обнаружения неисправности, выдается на блок индикации 23 номер неисправного ЭПК.
2) Если КП 3 находится не в положении N, то на блок индикации 23 выдается сигнал «Зажигание запрещено» (не показано), в противном случае сигнал не выдается. Перед включением зажигания необходимо перевести КП 3 в положение N путем нажатия кнопки органов управления 22 «принудительная установка нейтрали».
3) Если при старте включается не первая или задняя передача, то на блоке индикации 23 выдается сигнал «Старт не возможен» (не показано), и включение КП 3 не производится. Если при старте включается задняя передача, то на блоке индикации 14 выдается сигнал «Требуется подтверждение», и включение КП 3 не производится до нажатия кнопки органов управления 22 «подтверждение включения заднего хода». Если при старте включается первая или задняя передача и нажата кнопка органов управления 22 «подтверждение включения заднего хода», то включение передачи производится после нажатия педали сцепления (не показано).
4) После переключения ЗРД 20 в новое положение КП 3 остается в предыдущем положении до нажатия педали сцепления.
5) После нажатия педали сцепления (переход датчика положения сцепления 29 в состояние «1») производится контроль цепей управления всех ЭПК с помощью интеллектуальных ключей 12 и, в случае обнаружения неисправности, выдается на блок индикации 23 номер неисправного ЭПК, а переключение передач запрещается.
Если неисправности не обнаружены, то производится переключение КП 3 в новое положение (если затребованная передача отличается от существующего состояния КП 3) в 4 этапа:
- этап 1 - перевод КП 3 в нейтральное положение по оси Х с помощью механизма автоматизированного переключения передач 24 путем открывания обоих электропневмоклапанов 27 цилиндров включения передач. Если коробка передач 3 оборудована делителем 39, то переключение делителя 39 начинается одновременно с выключением передачи по нажатию педали сцепления путем подачи сигнала на соответствующий ЭПК 40. Питание с ЭПК 40 по завершению переключения делителя 39 не снимается до следующего переключения. Этап заканчивается после перехода датчиков включения передач 25 по оси Х в состояние «11», при этом напряжение на электропневмоклапанах 27 по оси Х остается такое, которое требуется для установки КП 3 в положение N;
- этап 2 - перевод КП 3 по оси Y в новое положение (этап выполняется, если новое положение КП 15 отличается от старого по оси Y). Если коробка передач 3 оборудована демультипликатором 42, то переключение демультипликатора 42 начинается после выключения передачи путем подачи сигнала на соответствующий ЭПК 43. Питание с ЭПК 43 по завершению переключения демультипликатора 42 не снимается до следующего переключения. После старта процедуры переключения демультипликатора 42 датчик состояния демультипликатора 44 переходит в состояние «1» до завершения переключения демультипликатора 42. Этап заканчивается после принятия датчиком состояния демультипликатора 44 значения «0» и перехода датчиков 26 выбора штока по оси Y в нужное состояние «10», «00» или «01», при этом напряжение на электропневмоклапанах 27 цилиндров включения передач по оси Х снимается, а на электропневмоклапанах 28 цилиндров выбора штока по оси Y остается такое, которое требуется для установки КП 3 в нужное положение «10», «00» или «01»;
- этап 3 - перевод КП 3 по оси Х в новое положение. Напряжение с электропневмоклапанов 28 цилиндров выбора штока по оси Y снимается, а по оси Х напряжение подается на соответствующий электропневмоклапан 27 цилиндров включения передач. Через время tс подается импульс тока длительностью τ, а через время tш подается серия из 2-3 импульсов тока длительностью τ и периодом τп на второй (встречный) ЭПК 27 цилиндров включения передач. Благодаря подаче импульсов на (встречный) ЭПК 27 цилиндров включения передач достигается уменьшение ударных нагрузок на коробку передач 3 со стороны электропневматического привода и за счет этого повышение ресурса работы коробки передач 3. Этап заканчивается после перехода датчиков включения передач 25 по оси Х в нужное состояние «10» или «01», при этом на блоке индикации 23 выводится новое положение КП 3, напряжение на электропневмоклапанах 27, 28 по обеим осям остается такое, которое требуется для установки КП 3 в нужное положение «10» или «01». При каждом включении для каждой передачи производится измерение времени выхода из нейтрали (переход датчиков включения передачи 25 из состояния «11» в состояние «00») и времени включения передачи (переход датчиков включения передачи 25 из состояния «11» в состояние «01» или «10») при измерении скоростей вращения первичного и вторичного валов. На основании этих измерений определяются tc и tш, где tс - время от начала включения передачи (подачи сигнала включения на первый электропневмоклапан 27 цилиндров включения передач) до начала подачи первого импульса на встречный электропневмоклапан (второй электропневмоклапан 27 цилиндров включения передач) для обеспечения уменьшения ударных нагрузок на синхронизатор, причем в зависимости от включаемой передачи первым электропневмоклапаном 27 цилиндров включения передач из пары электропневмоклапанов может быть любой электропневмоклапан 27 цилиндров включения передач, а tш - время от начала включения передачи до ожидаемого времени завершения синхронизации, при котором подается серия встречных импульсов для обеспечения уменьшения ударных нагрузок на шестерни. При этом tш определяется как функция разности скоростей вращения первичного и вторичного валов;
- этап 4 - после приведения педали сцепления в исходное положение (переход датчика положения сцепления 23 в состояние «0») напряжение со всех электропневмоклапанов снимается.
При нажатии кнопки органов управления 22 «принудительная установка «нейтрали» производится принудительный перевод КП 3 в состояние N (этап 1 п.4).
Работа системы управления 1 электропневматическим приводом коробки передач в режиме «Полуавтоматическое управление» происходит следующим образом:
1) Процедуры старта выполняются аналогично режиму «Ручное управление».
2) Перевод КП 3 в новое положение во время движения осуществляется сразу после кратковременного перевода ЗРД 20 в положение понижение или повышение передачи следующим образом:
- этап 1 - подается сигнал на выключение сцепления (этап завершается по получению сигнала от датчика положения сцепления 29). По завершению этапа сигнал выключения сцепления не снимается;
- этап 2 - подается сигнал на выключение передачи и перевод КП 3 в положение N. Если коробка передач 3 оборудована делителем 39, то переключение делителя 39 начинается одновременно с выключением передачи по получению сигнала от датчика положения сцепления 29 путем подачи сигнала на соответствующий ЭПК 40. Питание с ЭПК 40 по завершению переключения делителя 39 не снимается до следующего переключения. Этап завершается по получению сигналов от датчиков Х - «11», при этом напряжение на клапанах по оси Х остается такое, которое требуется для установки КП 3 в положение N;
- этап 3 - если коробка передач 3 оборудована демультипликатором 42 и если поступила соответствующая команда, то производится переключение демультипликатора 42 путем подачи сигнала на соответствующий ЭПК 43, в противном случае этап 3 не выполняется и производится переход на следующий этап. Питание с ЭПК 43 по завершению переключения демультипликатора 42 не снимается до следующего переключения. После старта процедуры переключения демультипликатора 42 датчик состояния демультипликатора 44 переходит в состояние «1» до завершения переключения демультипликатора 42. Этап заканчивается после принятия датчиком состояния демультипликатора 42 значения «0». На протяжении этапа 3 сцепление находится в выключенном состоянии;
- этап 4 - включается сцепление путем снятия сигнала выключения сцепления и производится запуск процедуры синхронизации первичного и вторичного валов. Параллельно выполнению процедуры синхронизации первичного и вторичного валов производится перевод КП 3 по оси Y в новое положение (действие выполняется, если новое положение КП 3 отличается от старого по оси Y). Этап заканчивается после перехода датчиков по оси Y в нужное состояние «10», «00» или «01», при этом напряжение на электропневмоклапанах по оси Y остается такое, которое требуется для установки КП 3 в нужное положение «10», «00» или «01»;
- этап 5 - производится контроль приближения скоростей первичного и вторичного валов КП 3 к зоне разрешения включения передачи. При выполнении условий приближения производится перевод КП 3 по оси Х в новое положение. Этап заканчивается после перехода датчиков по оси Х в нужное состояние «10» или «01», при этом на блоке индикации 23 выводится новое положение КП 3, напряжение на электропневмоклапанах по обеим осям снимается.
Работа системы управления 1 электропневматическим приводом механической ступенчатой коробки передач в режиме «Автоматическое управление» происходит следующим образом:
1) При переводе ЗРД 20 в положение «Движение» или «Задний ход» подается сигнал на выключение сцепления, и КП переводится в соответствующее положение «задний ход» или «первая передача».
2) Производится плавное включение сцепления путем подачи импульсных сигналов переменной длительности на ЭПК управления сцеплением 29. Автомобиль начинает движение назад или вперед на первой передаче. При движении назад дальнейшего переключения передач не производится.
3) При движении вперед постоянно работает процедура определения условия переключения передач. Для определения условий и направления переключения передач в качестве исходных данных используются скорость вращения первичного вала (n) и уровень цикловой подачи топлива (р). Для каждой передачи (i) имеется пара-функция niгр=fi(p) для определения граничных значений частоты вращения первичного вала при превышении (снижении) реальной частоты вращения первичного вала, относительно которого необходимо произвести переключение передач соответственно вверх или вниз.
4) В случае выполнения условий производится переключение передач аналогично тому, как это выполняется в режиме полуавтоматического управления.
При переводе ЗРД 20 в положение «нейтраль» производится снижение скорости автомобиля до полной остановки.
При переключении передач возможны два варианта синхронизации скоростей вращения первичного и вторичного валов коробки передач:
- синхронизация с помощью механических синхронизаторов (используется в режиме «Ручное управление»), установленных на валах перед шестернями соответствующих передач (не показано);
- центральная синхронизация с помощью двигателя 31.
Центральная синхронизация может выполняться двумя способами:
- прямым управлением двигателем 31 путем установки и управления электропневмоклапанами торможения 37 двигателя (включения ретардера или горного тормоза) и топливоподачи 36 двигателя (повышения оборотов двигателя);
- передачей команд на систему управления 48 двигателем через цифровой канал 14.
Синхронизация первичного и вторичного валов при прямом управлении двигателем выполняется при движении автомобиля после перевода КП 3 в положение N следующим образом:
1) Если необходимо выполнить понижение передачи, то производится переход на выполнение п.2). Если необходимо выполнить повышение передачи, то производится переход на выполнение п.5).
2) Выдается сигнал на включение электропневмоклапана 36 управления топливоподачей двигателя.
3) Производится измерение скоростей вращения первичного и вторичного валов и определяется момент превышения скорости вращения первичного вала над скоростью вращения вторичного вала с учетом передаточного числа включаемой передачи на величину 50-100 об/мин (величина определяется экспериментально).
4) Снимается сигнал включения с электропневмоклапана 36 управления топливоподачей двигателя.
5) Выдается сигнал на включение электропневмоклапана 37 торможения двигателя.
6) Производится измерение скорости убывания разности скоростей вращения первичного и вторичного валов (v) и определяется пороговая величина разности скоростей, при которой необходимо подавать сигнал на включение передачи, из выражения vtвкл+25, где tвкл - время включения передачи, 25 - constant.
7) После достижения пороговой разности скоростей выдается сигнал на включение передачи.
Синхронизация первичного и вторичного валов при управлении двигателем по информационному каналу выполняется при движении автомобиля после перевода КП 3 в положение N следующим образом:
1) Производится измерение скорости (fв) вторичного вала и вычисление требуемой скорости (fт) первичного вала с учетом передаточного числа (ki) включаемой передачи (i)-fт=fв·ki.
2) В системе управления 47 двигателем передается сообщение с указанием требуемой скорости вращения fт двигателя 31.
3) Производится измерение скорости вращения (fп) первичного вала и определяется момент выполнения соотношения fп-fт≤25. После выполнения указанного соотношения выдается сигнал на включение передачи.
Микроконтроллер 8 предназначен для обработки данных, считанных с датчиков 25, 26, 29, 45, 41, 44, 46, 47, выдачи управляющих воздействий на ЭПК 27, 28, 36, 37, 40, 43, вывода на блок индикации 23 и в сеть CAN статусной и диагностической информации, диагностики цепей ЭПК, приема и обработки сообщений сети CAN в соответствии со стандартами SAE J1 939. Микроконтроллер может быть реализован на микросхеме Fujitsu F2MC - 16LX MB90F497GPFM.
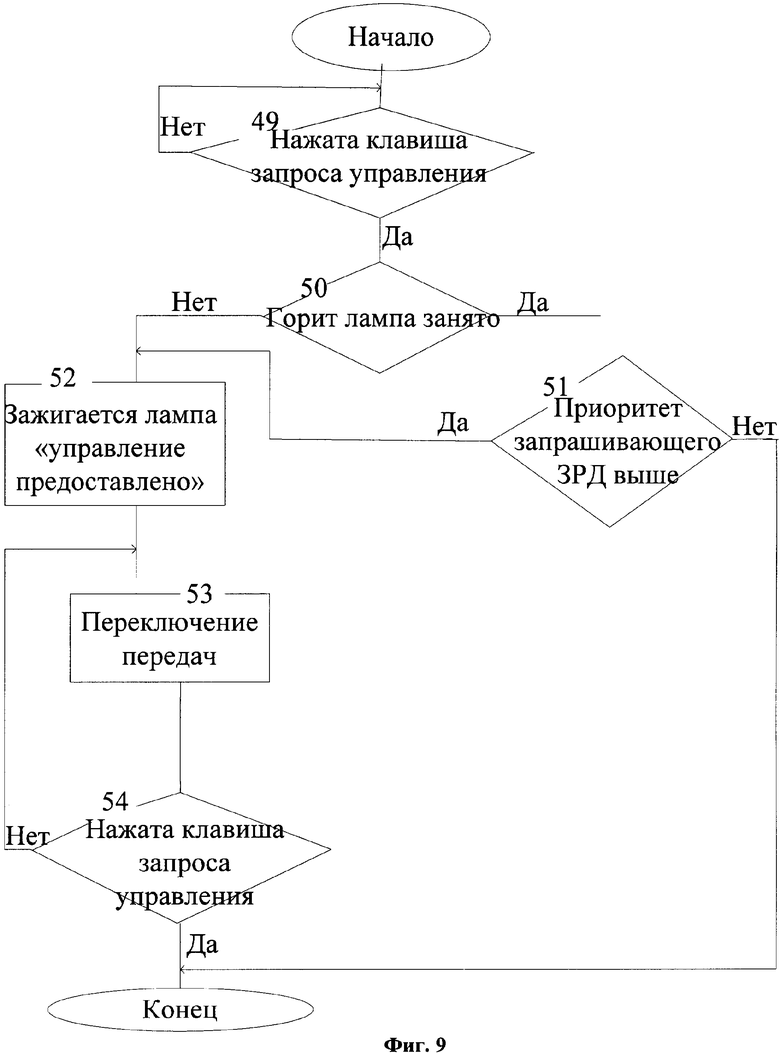
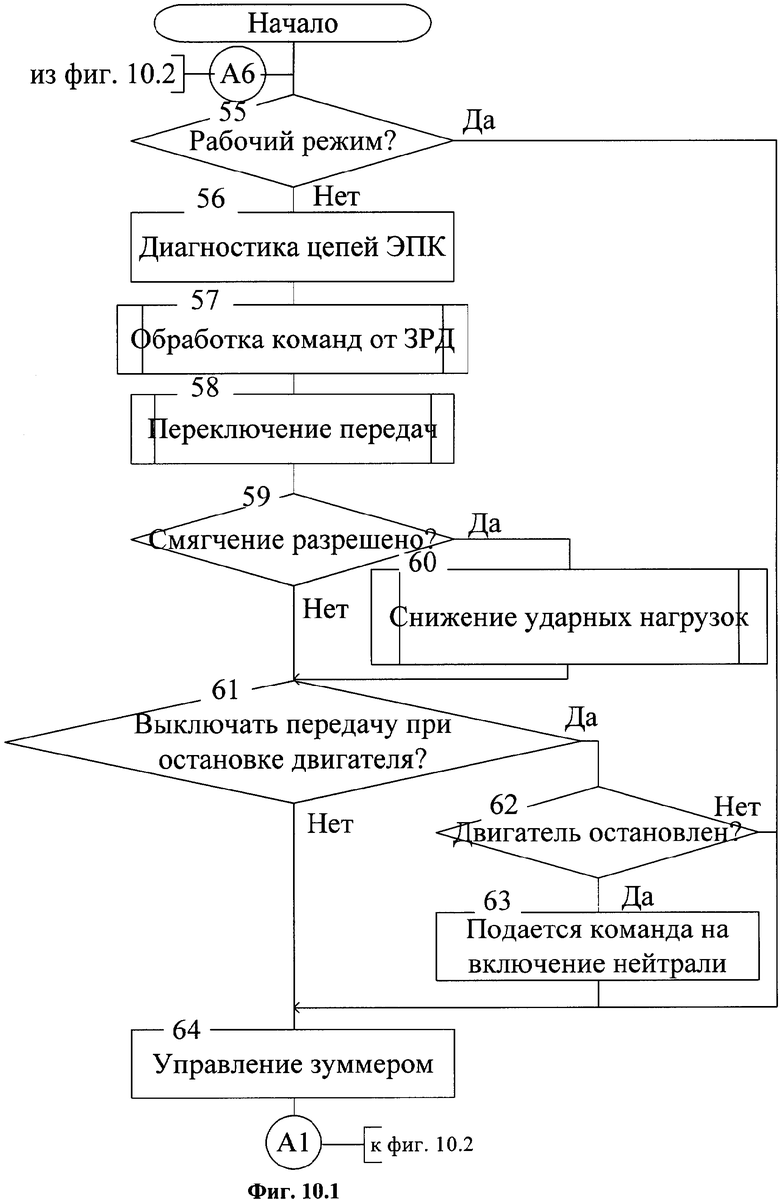
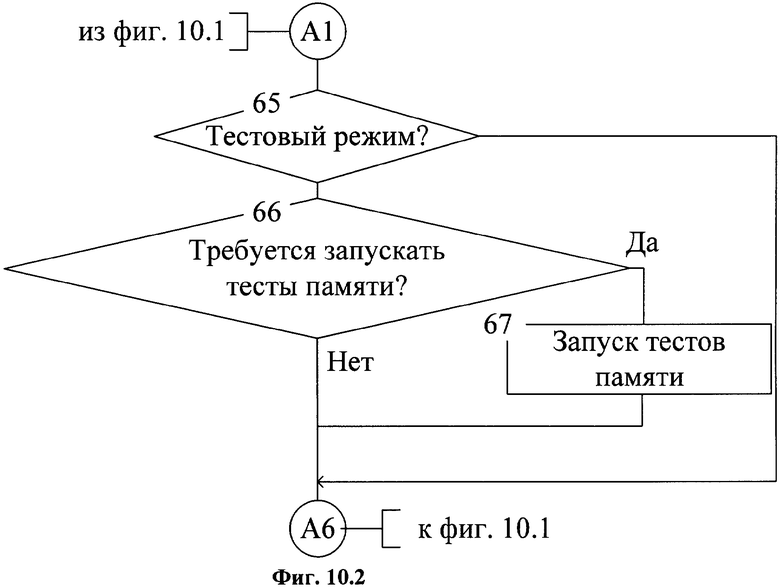
Пример работы микроконтроллера 15 в режиме «Ручное управление» представлен на следующих чертежах: на фиг.9 показана процедура выбора пульта управления коробкой передач, на фиг.10.1, 10.2 представлен общий режим переключения передач работы системы управления переключением передач, на фиг.11.1, 11.2, 11.3 показан режим обработки команд от ЗРД, на фиг.12.1, 12.2 показан режим переключения передач и на фиг.13 показан режим снижения ударных нагрузок. Блоки на фиг.9, 10.1, 10.2 имеют следующее назначение:
49. Нажата клавиша запроса управления.
50. Горит лампа «занято».
51. Приоритет запрашивающего ЗРД.
52. Зажигается лампа «управление предоставлено».
53. Переключение передач (работа процедуры представлена на фиг.9).
54. Нажата клавиша запуска управления.
55. Проверяется, находится ли устройство управления в рабочем режиме, т.е. может ли устройство обеспечивать переключение передач.
56. Производится диагностика цепей ЭПК на обрыв и КЗ.
57. Вызывается процедура, обеспечивающая обработку команд от ЗРД (работа процедуры приведена на фиг.10.1).
58.Вызывается процедура, обеспечивающая переключение передач (работа процедуры приведена на фиг.10.1).
59. Проверяется необходимость снижения ударных нагрузок (это задано в исходных данных, указанных при сборке конкретного привода).
60. Вызывается процедура, обеспечивающая снижения ударных нагрузок (работа процедуры приведена на фиг.10.1).
61. Проверяется необходимость выключения передачи при остановке двигателя (это задано в исходных данных, указанных при сборке конкретного привода).
62. Проверяется, остановлен ли двигатель.
63. Выдается команда на выключение передачи.
64. Вызывается функция управления зуммером (звуковой сигнализацией).
65. Проверяется, находится ли устройство управления в тестовом режиме (см. фиг.10.2).
66. Проверяется необходимость запуска тестов.
67. Запускается процедура выполнения тестов энергонезависимой памяти.
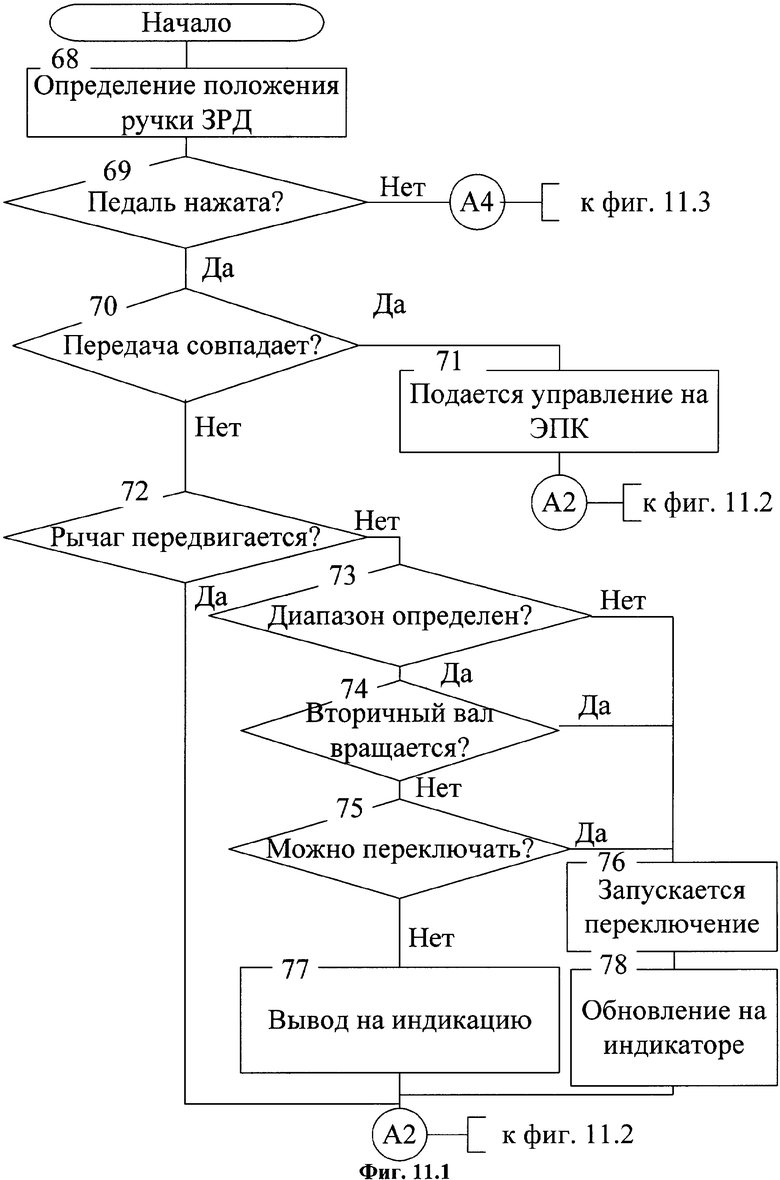
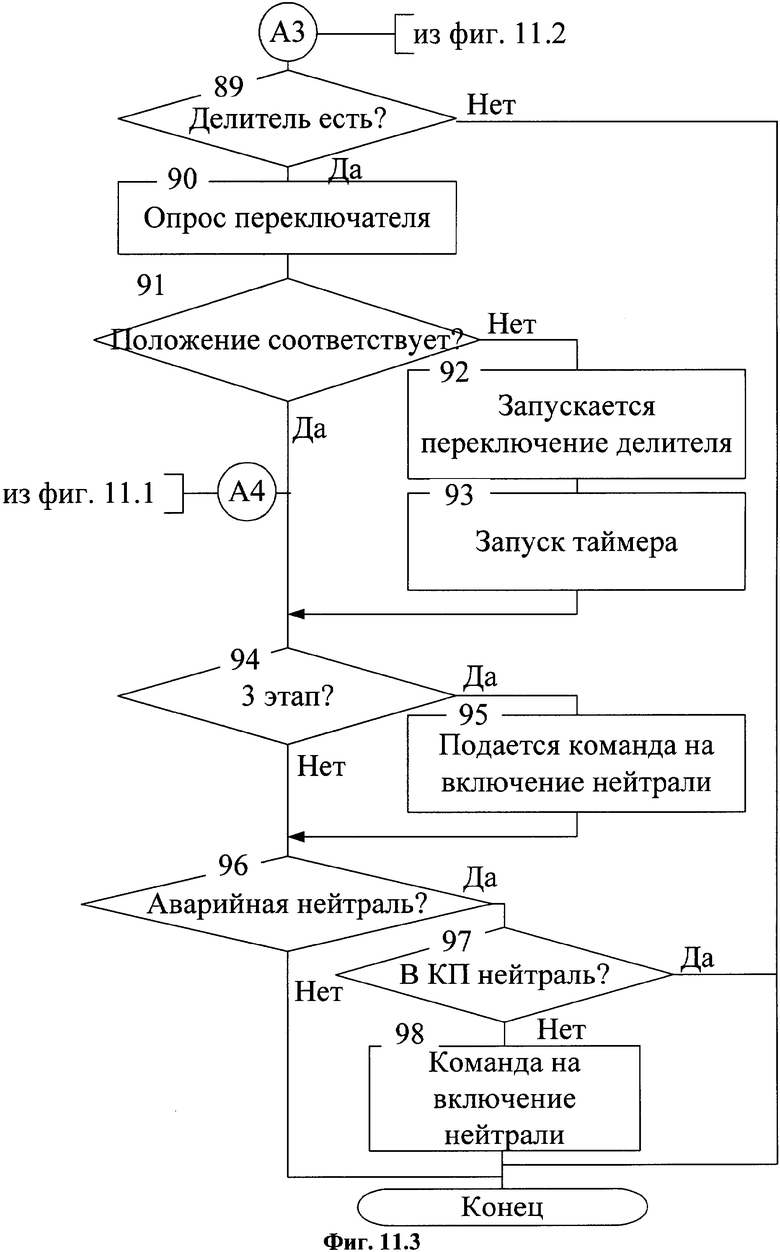
Блоки на фиг.11.1, 11.2, 11.3 имеют следующее назначение:
68. Определяется местоположение ручки ЗРД, т.е. определяется заказанная передача.
69. Проверяется, нажата ли педаль сцепления.
70. Проверяется, совпадает ли выбранная на ЗРД передача с включенной на КП.
71. Подается управление на ЭПК, обеспечивающее переключение передач таким образом, чтобы удержать включенной именно эту передачу.
72. Проверяется, передвигается ли сейчас рычаг механизма автоматизированного переключения передач.
73. Проверяется, с любых ли передач может стартовать привод.
74. Проверяется наличие вращения вторичного вала.
75. Проверяется, можно ли стартовать с заказанной передачи.
76. Выдается команда на включение заказанной передачи.
77. На блок индикации выводится сигнализация о попытке старта с передачи, с которой старт запрещен.
78. На блок индикации прекращается вывод сигнализация о попытке старта с передачи, с которой старт запрещен.
79. Проверяется наличие демультипликатора (это задано в исходных данных, указанных при сборке конкретного привода).
80. Проверяется, находится ли КП в нейтральном положении.
81. Считывается положение тумблера органов управления 22 «переключатель демультипликатора».
82. Проверяется, совпадает ли запрошенный с тумблера органов управления 22 «переключатель демультипликатора» диапазон с включенным на КП.
83. Проверяется необходимость переключения на повышенный диапазон.
84. Проверяется, есть ли ограничение по скорости привода при переключении на пониженный диапазон (это задано в исходных данных, указанных при сборке конкретного привода).
85. Проверяется, меньше ли скорость привода граничного значения (это задано в исходных данных, указанных при сборке конкретного привода).
86. Подается управление на электропневмоклапаны демультипликатора, чтобы переключить его на нужный диапазон.
87. Проверяется, подключен ли датчик демультипликатора, показывающий статус переключения (это задано в исходных данных, указанных при сборке конкретного привода).
88. Запускается процедура обработки сигнала с датчика демультипликатора.
89. Проверяется наличие делителя (это задано в исходных данных, указанных при сборке конкретного привода).
90. Считывается положение тумблера органов управления 22 «переключатель делителя».
91. Проверяется, соответствует ли положение тумблера органов управления 22 «переключатель делителя» включенному диапазону на КП.
92. Подается управление на электропневмоклапаны делителя, чтобы переключить его на нужный диапазон.
93. Запускается таймер на заданное время (это задано в исходных данных, указанных при сборке конкретного привода), по завершению которого гарантировано завершение переключения делителя и может быть снято питание с электропневмоклапанов.
94. Проверяется, идет ли третий этап переключения, т.е. включение передачи.
95. Выдается команда на выключение передачи.
96. Проверяется, нажата ли кнопка органов управления 22 «аварийная нейтраль».
97. Проверяется, находится ли КП в нейтральном положении.
98. Выдается команда на выключение передачи.
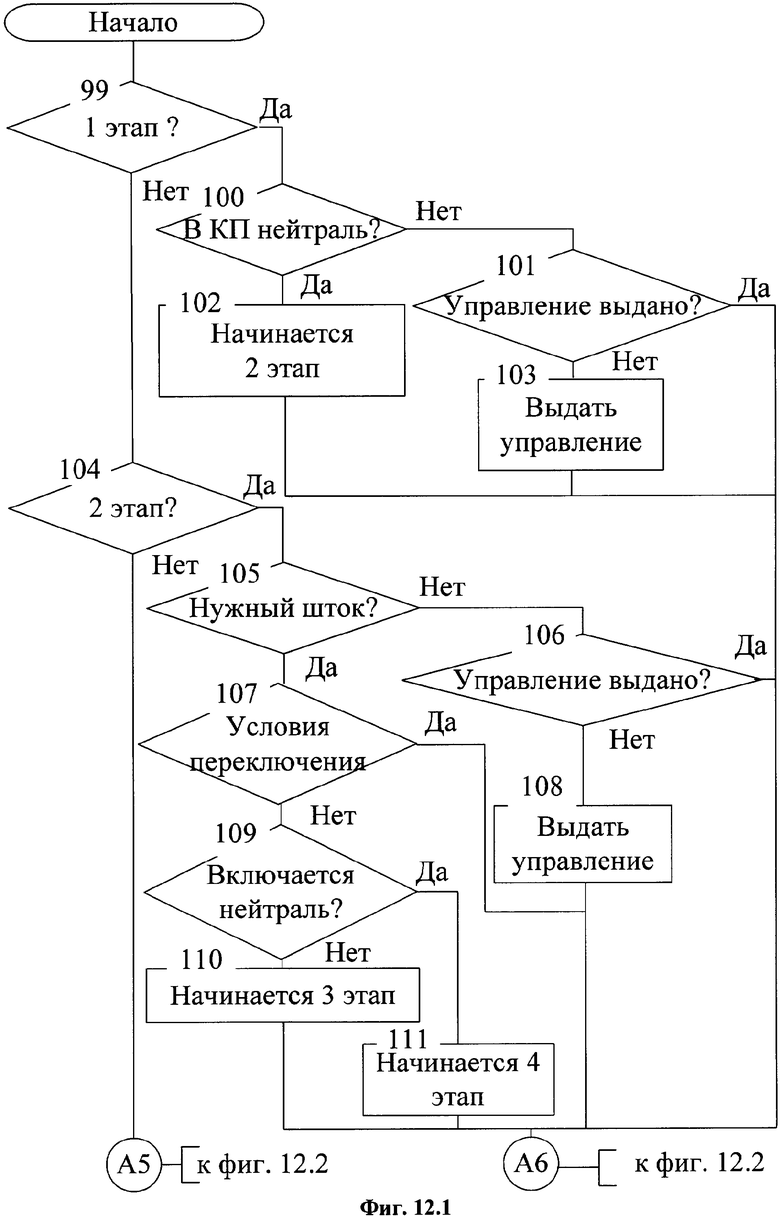
Блоки на фиг.12.1, 12.2 имеют следующее назначение:
99. Проверяется, идет ли первый этап переключения, т.е. выключение передачи.
100. Проверяется, находится ли КП в нейтральном положении.
101. Проверяется, выдано ли управление на электропневмоклапаны цилиндров включения передач 27, обеспечивающие переключение КП в нейтральное положение.
102. Производится переход на второй этап переключения.
103. Производится выдача управления на электропневмоклапаны 27, обеспечивающие переключение КП в нейтральное положение.
104. Проверяется, идет ли второй этап переключения.
105. Проверяется, находится ли рычаг механизма автоматизированного переключения передач 24 напротив нужного штока в КП.
106. Проверяется, выдано ли на электропневмоклапаны 28 управление, обеспечивающее выбор нужного штока в КП.
107. Проверяется, переключается ли демультипликатор.
108. Производится выдача управления на электропневмоклапаны 28, обеспечивающего перемещение рычага механизма автоматизированного переключения передач 24 к нужному штоку.
109. Проверяется, «нейтраль» ли заказанная передача.
110. Производится переход на третий этап переключения.
111. Производится переход на четвертый этап переключения.
112. Проверяется, идет ли третий этап переключения.
113. Проверяется, включена ли в КП заказанная на ЗРД передача.
114. Проверяется, выдано ли на электропневмоклапаны 27 управление, обеспечивающее включение заказанной на ЗРД передачи.
115. Производится переход на четвертый этап переключения.
116. Производится выдача управления на электропневмоклапаны 27, обеспечивающего включение заказанной на ЗРД передачи.
117. Проверяется необходимость снижения ударных нагрузок (это задано в исходных данных, указанных при сборке конкретного привода).
118. Проверяется, идет ли четвертый этап переключения.
119. Запускается таймер на время tс для первой фазы снижения ударных нагрузок («смягчения»), производится переход на первую фазу «смягчения».
120. Проверяется, сработал ли датчик положения сцепления 29.
121. Проверяется, зафиксирована ли неисправность в цепях ЭПК.
122. Производится переход на первый этап переключения.
123. Снимается питание с электропневмоклапанов 27 и 28, осуществляющих переключение передач.
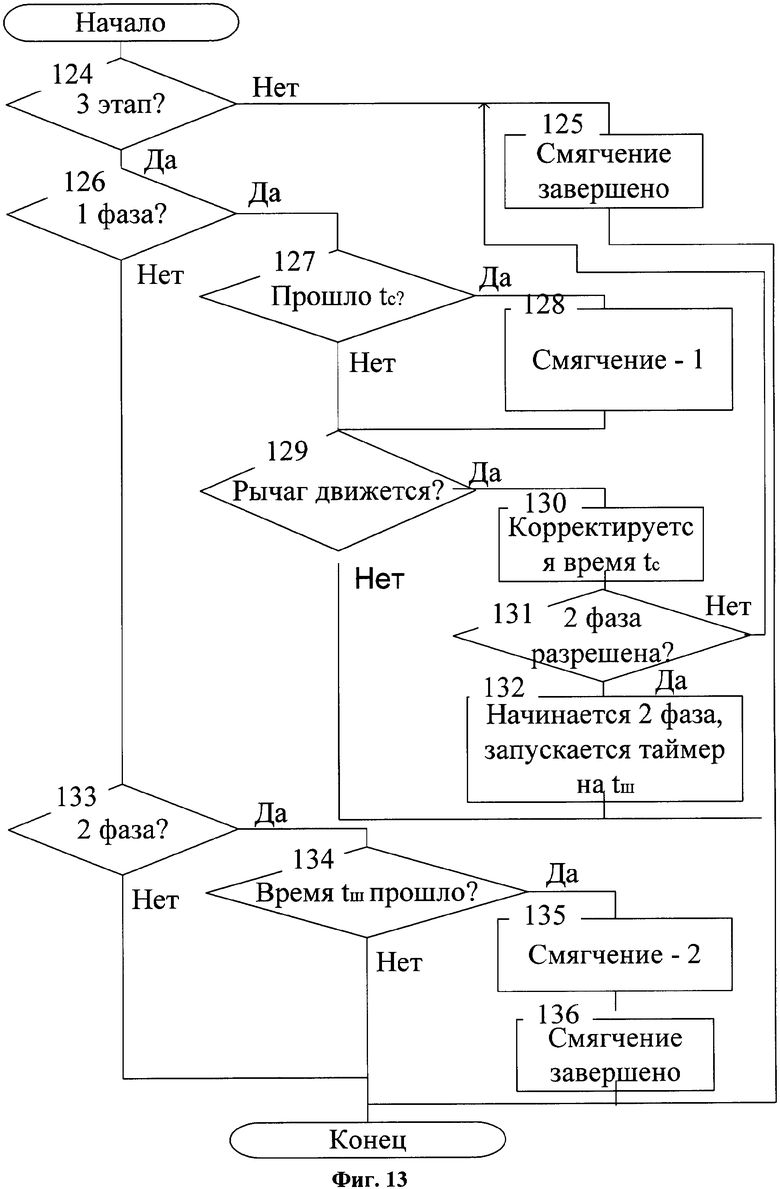
Блоки на фиг.13 имеют следующее назначение:
124. Проверяется, идет ли третий этап переключения.
125. Завершается процедура «Смягчение».
126. Проверяется, идет ли первая фаза «смягчения».
127. Проверяется, прошло ли время tс с начала третьего этапа переключения.
128. Производится выдача встречного импульса для «смягчения» удара по механическим синхронизаторам КП, первая фаза «смягчения» завершается.
129. Проверяется, началось ли перемещение рычага механизма автоматизированного переключения передач 24 в сторону заказанной передачи.
130. Производится корректировка времени tс.
131. Проверяется, разрешена ли вторая фаза «смягчения» (это задано в исходных данных, указанных при сборке конкретного привода).
132. Запускается таймер на время tш, производится переход во вторую фазу «смягчения».
133. Проверяется, идет ли вторая фаза «смягчения».
134. Проверяется, прошло ли время tш с момента срыва с нейтрали.
135. Производится выдача серии встречных импульсов для «смягчения» удара по шестерне.
136. Завершается процедура «Смягчение».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015937C1 |
| Система управления скоростью движения транспортного средства | 1987 |
|
SU1537575A1 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
| Система управления составной коробкой передач транспортного средства | 1990 |
|
SU1710377A1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170678C1 |
| Система управления работой автомобильного дизеля в динамическом режиме самостоятельного холостого хода | 2019 |
|
RU2702445C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |



Изобретение относится к вычислительной технике и может найти применение в системах управления электропневматическим приводом механической ступенчатой коробки передач. Система содержит электронный блок управления коробкой передач и электронный модуль управления манипулятора. Электронный блок управления коробкой передач содержит интерфейс датчиков, микроконтроллер, интерфейс цифрового канала, блок питания, перепрограммируемое энергонезависимое запоминающее устройство, интеллектуальные ключи, таймер. Электронный модуль управления манипулятора содержит микроконтроллер, интерфейс задатчика режимов движения, интерфейс блока индикации, интерфейс цифрового канала, блок питания. Технический результат заключается в повышении надежности, помехоустойчивости и организации многопультового управления режимами работы коробки передач. 12 з.п. ф-лы, 17 ил.
1. Система управления 1 электропневматическим приводом 2 механической ступенчатой коробки передач 3 привода 4, содержащая электронный блок управления 5 коробкой передач 3, содержащий микроконтроллер 8, соединенный с интерфейсом датчиков 7, интерфейсом цифрового канала 9, блоком питания 10, перепрограммируемым энергонезависимым запоминающим устройством 11, интеллектуальными ключами 12, таймером 13, причем блок питания 10 соединен с интеллектуальными ключами 12, перепрограммируемым энергонезависимым запоминающим устройством 11, интерфейсом датчиков 7 и интерфейсом цифрового канала 9, отличающаяся тем, что она дополнительно содержит электронный модуль управления манипулятора 6, включающий микроконтроллер 15, соединенный с интерфейсом задатчика режимов движения 16, интерфейсом блока индикации 17, интерфейсом цифрового канала 18 и блоком питания 19, причем интерфейс цифрового канала 18 соединен с блоком питания 19, интерфейсом задатчика режимов движения 16 и интерфейсом блока индикации 17, электронный модуль управления манипулятора 6 соединен с электронным блоком управления 5 механической ступенчатой коробкой передач 3 посредством цифрового канала обмена информацией 14, электропневматический привод 2 механической ступенчатой коробки передач 3 привода 4 содержит, по меньшей мере, блок индикации 23, задатчик режимов движения 20, датчик положения сцепления 29, механизм автоматизированного переключения передач 24 с датчиками включения передач 25, датчиками выбора штока 26, двумя электропневмоклапанами цилиндров включения передач 27 и двумя электропневмоклапанами цилиндров выбора штока 28, механизм автоматизированного переключения передач 24 установлен на механической ступенчатой коробке передач 3, входы интерфейса датчиков 7 электронного блока управления 5 механической ступенчатой коробкой передач 3 соединены с выходами датчиков включения передач 25, выбора штока 26 и датчика положения сцепления 29, выходы интеллектуальных ключей 12 электронного блока управления 5 механической ступенчатой коробкой передач 3 соединены со входами электропневмоклапанов цилиндров включения передач 27 и цилиндров выбора штока 28, объединенные входы питания датчика положения сцепления 29, датчиков выбора штока 26 и включения передач 25 соединены с блоком питания 10 электронного блока управления 5 механической ступенчатой коробкой передач 3, вход блока питания 10 электронного блока управления 5 механической ступенчатой коробкой передач 3 и вход блока питания 19 электронного модуля управления манипулятора 6 соединены с сетью электропитания 30 привода 4, электронный модуль управления манипулятора 6 размещен в задатчике режимов движения 20, интерфейс задатчика режимов движения 16 электронного модуля управления манипулятора 6 соединен с датчиками выбора передач 21 и органами управления 22 задатчика режимов движения 20, блок индикации 23 соединен с интерфейсом блока индикации 17 электронного модуля управления манипулятора 6.
2. Система по п.1, отличающаяся тем, что она содержит n задатчиков режимов движения, соединенных через цифровой канал с электронным блоком управления механической ступенчатой коробкой передач и m блоков индикации, соединенных с n задатчиками режимов движения при n больше или равно m (где n=1, 2, …,N; m=1, 2, …,M).
3. Система по п.1, отличающаяся тем, что привод 4 содержит, по меньшей мере, двигатель 31, соединенный с механической ступенчатой коробкой передач 3 через сцепление 32 с механизмом управления 33 сцеплением 32, механизмы 34, 35 управления топливоподачей и торможением двигателя с электропневмоклапанами 36, 37 управления топливоподачей и торможением двигателя соответственно, входы которых соединены с выходами интеллектуальных ключей 12 электронного блока управления 5 механической ступенчатой коробкой передач 3.
4. Система по п.3, отличающаяся тем, что на механизме управления 33 сцеплением 32 размещен электропневмоклапан 38 управления сцеплением, вход которого соединен с одним из выходов интеллектуальных ключей 12 электронного блока управления 5 механической ступенчатой коробкой передач 3.
5. Система по любому из пп.1, 3 и 4, отличающаяся тем, что механическая ступенчатая коробка передач 3 содержит делитель 39, управляемый двумя электропневмоклапанами 40, входы которых соединены с выходами интеллектуальных ключей 12 электронного блока управления 5 механической ступенчатой коробкой передач.
6. Система по любому из пп.1, 3 и 4, отличающаяся тем, что механическая ступенчатая коробка передач 3 содержит датчик состояния 41 делителя 39, выход которого соединен с одним из входов интерфейса датчиков 12 электронного блока управления 5 механической ступенчатой коробкой передач 3.
7. Система по любому из пп.1, 3 и 4, отличающаяся тем, что механическая ступенчатая коробка передач 3 содержит демультипликатор 42, управляемый двумя электропневмоклапанами 43, и датчик состояния 44 демультипликатора 42, выход которого соединен с одним из входом интерфейса датчиков 7 и электронного блока управления 5 механической ступенчатой коробкой передач 3, причем выходы интеллектуальных ключей 12 электронного блока управления 5 механической ступенчатой коробкой передач 3 соединены со входами элсктропневмоклапанов 43 демультипликатора 42.
8. Система по любому из пп.1, 3 и 4, отличающаяся тем, что механическая ступенчатая коробка передач 3 содержит, по меньшей мере, датчик частоты вращения первичного вала 45, выход которого соединен с одним из входов интерфейса датчиков 7 электронного блока управления 5 механической ступенчатой коробкой передач 3.
9. Система по любому из пп.1, 3 и 4, отличающаяся тем, что механическая ступенчатая коробка передач 3 содержит, по меньшей мере, датчик частоты вращения вторичного вала 46, выход которого соединен с одним из входов интерфейса датчиков 7 электронного блока управления 5 механической ступенчатой коробкой передач 3.
10. Система по п.8, отличающаяся тем, что в качестве датчика 45 частоты вращения первичного вала использован контрольный и/или измерительный прибор.
11. Система по п.9, отличающаяся тем, что в качестве датчика 46 частоты вращения вторичного вала использован контрольный и/или измерительный прибор.
12. Система по любому из пп.10 и 11, отличающаяся тем, что контрольные и/или измерительные приборы соединены с выходом интерфейса цифрового канала 18 посредством цифрового канала обмена информацией 14.
13. Система по п.1, отличающаяся тем, что в качестве цифрового канала обмена информацией 14 использован интерфейс CAN.
| RU 2006125894 А, 27.01.2008 | |||
| Способ получения алкиламиновых эфиров N-моноалкированных и N-моноалкилоксиалкилированных дериватов р-аминобензойных кислот | 1926 |
|
SU13954A1 |
| JP 60143132 A, 29.07.1985 | |||
| US 2003033069 A1, 13.02.2003. | |||

