Изобретение относится к измерительной технике и может быть использовано для контроля формы и взаимного расположения поверхностей крупногабаритных изделий и объектов на расстояниях до 100 метров и более.
Известны лазерные интерферометры для измерения отклонений от прямолинейности на больших расстояниях, например лазерный интерферометр XL-80 фирмы RENISHAW [1], результаты измерения которого базируются на известной длине волны лазерного излучения, поверка которого выполняется в соответствии с международным стандартом длины.
При работе с лазерными интерферометрами необходима строгая компенсация воздействия изменений условий окружающей среды с помощью специальных датчиков, неточность которых изменяет длину волны и приведет к ошибке измерений. Из-за несоблюдения принципа Аббе (совмещения оси движения с осью измеряемого объекта) и отклонения лазерного луча от направления движения объекта также возникают ошибки измерений. Существенным недостатком лазерных интерферометров является исчезновение интерференционной картины, а следовательно, и результатов измерений, при случайном перекрытии лазерного пучка.
Несмотря на высокую точность (±0,5 мкм/м), недостатком лазерных интерферометров является сложность их изготовления и юстировки, настройки в процессе эксплуатации, проблемы аттестации и поверки. Следствием этих недостатков является высокая стоимость и ограниченное применение в цеховых условиях.
Известна система измерительная лазерная FIXTURLASER LEVEL фирмы [2] для измерения отклонений от плоскостности или прямолинейности на дистанции измерения до 50 метров, в которой кроме конструктивной значительной погрешности задающего направления (угол между стационарным лучом и плоскостью 0,03 мм/м, т.е. на 50 метрах - 0,15 мм), имеет место погрешность из-за нестабильности положения оси лазерного излучения. В результате суммарная погрешность указанной системы - значительная и составляет ±0,05 мм/м, т.е. не является точным устройством.
Известны в лазерных системах фотоэлектрические устройства измерения перемещений в интересах контроля прямолинейности и плоскостности [3], учитывающие нестабильность интенсивности светового потока излучателя, однако также не обеспечивающие достаточной точности из-за зависимости от нестабильности положения оси лазерного излучения.
В предлагаемом изобретении решается одна из важнейших проблем повышения точности лазерных измерительных приборов для контроля прямолинейности, связанная со снижением погрешности измерений из-за нестабильности положения оси диаграммы направленности (ОДН) лазерного излучения.
Более близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является контрольно-измерительное устройство для центрирования по лазерному лучу [4]. Оно содержит лазер, оптическую систему создания кольцевой структуры лазерного луча и измерительный блок. Измерительный блок состоит из позиционно-чувствительного фотоприемника, включающего анализатор положения лазерного луча с фотоприемником, и вычислителя с усилителем и блоком индикации. Для создания реперной оси лазерного направления, не зависящего от нестабильности положения ОДН, в устройстве используется коллиматор-интерферометр, состоящий из трех оптических компонентов, которые преобразуют лазерный луч в интерференционную кольцевую структуру, сохраняемую на больших расстояниях. Четкость интерференционной картины зависит от взаимного положения оптических компонентов коллиматора. Юстировка трехкомпонентной системы из-за повышенных допусков для обеспечения требуемой точности усложняется. Устройство требует периодической отладки и аттестации в специализированной лаборатории.
Если использовать двухкомпонентную систему, описанную в прототипе, то для получения кольцевой структуры в лазерном луче необходимо отнести коллиматор на большое расстояние от лазера, чтобы падающий на оптические компоненты пучок лучей был большого диаметра. Такая система получается громоздкой и непригодной для эксплуатации в промышленных условиях. Кроме того, из-за возможных смещений в процессе эксплуатации лазера относительно оси коллиматора происходит деформация кольцевой структуры, возникают блики и, хотя центральное пятно не смещается, меняется картина распределения освещенности, снижается разрешающая способность устройства. Для повышения точности измерения вводится модулятор, т.е. устройство усложняется, за счет перемещения оптического компонента коллиматора. Перечисленные выше недостатки коллиматора - интерферометра, преобразующего лазерный луч в кольцевую структуру усложняют конструкцию устройства и процесс измерения, снижают точность, ограничивают его возможности использования на больших дистанциях.
Целью предлагаемого изобретения является упрощение конструкции и повышение точности измерений непрямолинейности на расстояниях до 100 метров и более.
Эта цель достигается тем, что в предлагаемом лазерном измерителе непрямолинейности для создания стабильной отсчетной базы, не зависящей от нестабильности оси направленности излучения лазера, оптическая система образования кольцевой структуры выполнена двухкомпонентной и содержит сферический аксикон. Аксикон обладает свойством изображать точку в виде прямой, лежащей на оптической оси, которая и является эталонной отсчетной базой на больших протяжениях. Кроме того, с целью повышения точности в устройстве в качестве фотоприемника используется телевизионная камера, в которой предусмотрена возможность изменения коэффициента преобразования световых сигналов в электрические, которая подключена к вычислительному блоку, например, к компьютеру.
Предлагаемое устройство поясняется чертежами, где на фиг.1 представлена структурная схема лазерного измерителя непрямолинейности; на фиг.2 - телевизионные изображения распределений освещенности в разных сечениях интерференционных картин, создаваемых аксиконом вдоль трассы; на фиг.3 - графики сигналов телекамеры до и после коррекции параметров телекамеры; на фиг.4 - блок-схема алгоритма преобразования кадра телевизионного изображения.
Лазерный измеритель непрямолинейности, согласно фиг.1, содержит лазер 1, двухкомпонентную оптическую систему 2, содержащую отрицательную линзу 3 для расширения пучка лазера и аксикон 4. Кроме того, в предлагаемое устройство входит телекамера 5 с приемником изображения 6, подключенным к блоку 7, обеспечивающему управление параметрами телекамеры и преобразование сигналов приемника 6 в видеосигнал. Выход телекамеры 5 подключен к вычислительному блоку 8, например, к системному блоку компьютера, который соединен с устройством отображения информации, например, с дисплеем. Лазер 1 и оптическая система 2 образуют единый в конструктивном плане блок, установленный на основании 10, который может содержать регулировочные элементы, обеспечивающие изменение углового и линейного положений оси направленности излучения. Телекамера 5 закреплена на основании 12. Основания 10 и 12 устанавливаются на исследуемом объекте 11, который может представлять собой, например, направляющие станков или протяженные плоские поверхности.
Аксикон 4 представляет собой положительный мениск, ограниченный двумя сферическими поверхностями с радиусами R1 и R2, причем  .
.
Отличительной особенностью оптической системы лазерного измерителя непрямолинейности является то, что благодаря совместному использованию свойств аксикона, обладающего значительной сферической аберрацией и большой пространственной и временной когерентностью лазерного излучения, образуется более четко организованная концентрическая кольцевая структура, сохраняющая стабильное положение относительно оси, вдоль которой распространяется излучение, т.е. создается более надежная и стабильная отсчетная база для измерения непрямолинейности на значительно больших расстояниях, до 100 метров и более. Лучи лазерного излучения преобразуются аксиконом 4 оптической системы 2 в кольцевую структуру, которая попадает на поверхность приемника 6 телекамеры. Телекамера 5 преобразует сигналы приемника 6 в цифровой видеосигнал и передает его в вычислительный блок. Последний передает сигналы в блок отображения информации 9, который выводит изображение кольцевой структуры на свой экран.
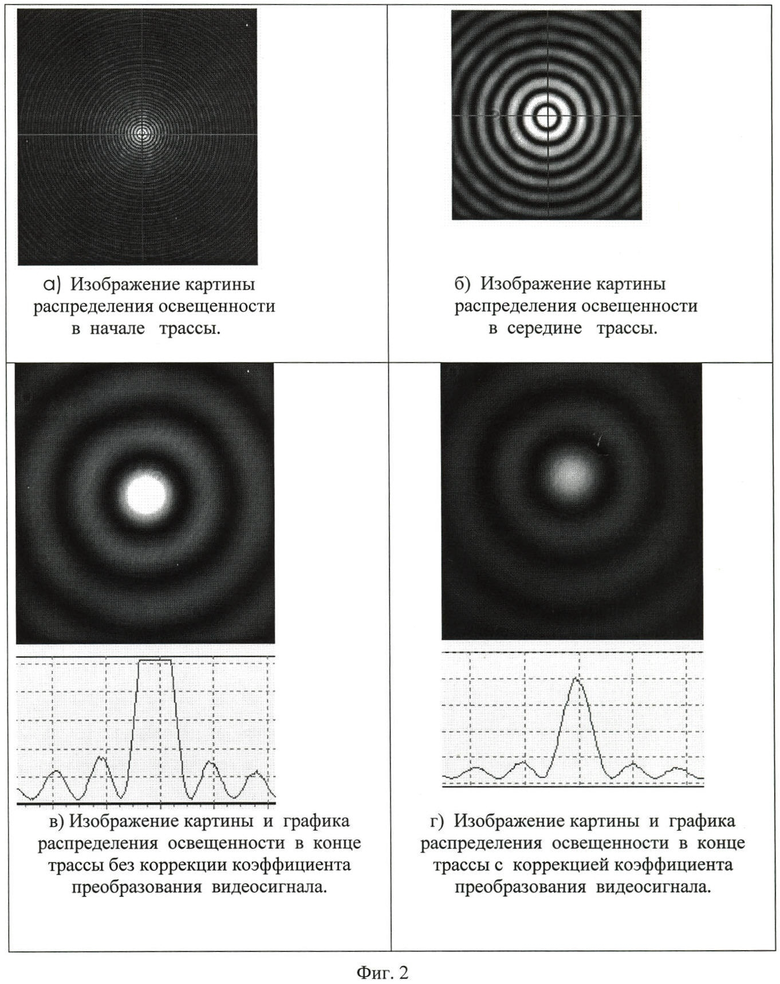
В зависимости от положения плоскости наблюдения кольцевой структуры вдоль трассы частота кольцевых структур меняется. Изображения кольцевых структур в разных плоскостях показаны на фиг.2. Вблизи оптической системы, плоскость П1 (фиг.1), частота полос наибольшая (фиг.2а), в средней части трассы, плоскость П2, частота полос уменьшается (фиг.2б), в конце трассы, плоскость П3, частота полос еще больше уменьшается (фиг.2в).
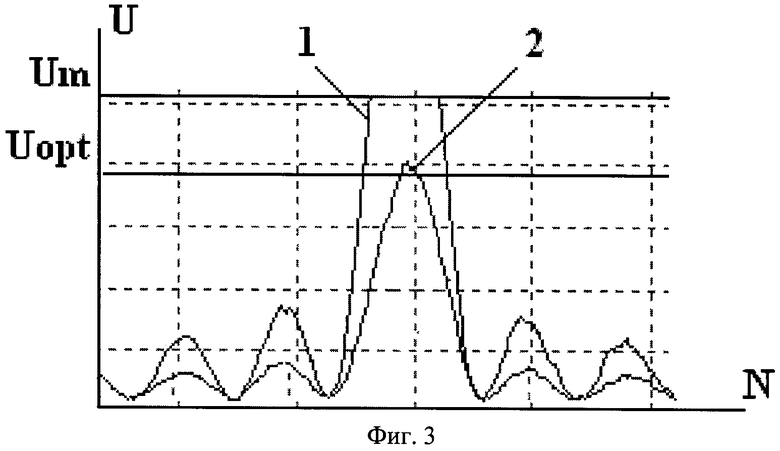
Величина освещенности центральной части кольцевой структуры имеет разные значения вдоль трассы. Телевизионные приемники имеют ограниченный диапазон линейности преобразования световых сигналов в электрические. При большом по величине световом сигнале приемники излучения переходят в режим насыщения, что приводит к искажению выходного сигнала телекамеры. Так, на фиг.2в приведен пример насыщения сигнала в центре. Видно, что в центре сигнал имеет плоскую вершину на уровне максимально возможного для данного приемника значения. При таком виде искаженного сигнала (плоская вершина) можно определить положение центра центральной части изображения, однако оно может отличаться от положения центра неискаженного сигнала. В связи с этим, для повышения точности измерения положения центра распределения освещенности в концентрической картине, предлагается изменять коэффициент преобразования оптического сигнала в электрический до такой степени, чтобы выходной сигнал телекамеры, соответствующий центральной зоне, был меньше максимально возможного уровня Um (фиг.3) и больше некоторого оптимального уровня Uopt. Этого можно добиться за счет изменения коэффициента усиления или экспозиции телекамеры. На фиг.3 по оси ординат откладываются значения напряжений сигнала телекамеры, по оси абсцисс - номера отсчетов (в случае использования телекамеры с фотоэлектрического ПЗС - это номера пиксел), цифровые обозначения: 1 и 2 - графики изменения сигналов телекамеры до и после коррекции параметров телекамеры.
Алгоритм работы вычислительного блока 8 представлен на блок-схеме (фиг.4). Нумерация этапов алгоритма соответствует нумерации разделов программы. Ниже перечислены этапы алгоритма:
1. Устанавливаются параметры телекамеры для съемки, в том числе коэффициент усиления и экспозиция.
2. Съем телекамерой кадра изображения с последующим его вводом в вычислительный блок.
3. Производится сканирование элементов записанного кадра изображения и выделяются элементы изображения с максимальным значением сигнала Um-c.
4. Производится сравнение величины Um-c, определенной на предыдущем этапе, с максимально возможным сигналом телекамеры Um и оптимальным уровнем Uopt. Если Um-c=Um (т.е. имеет место насыщение сигнала приемника телекамеры) или Um-c<Uopt (т.е. сигнал телекамеры ниже оптимального уровня), то процесс переходит по стрелке «Да», в противном случае - по стрелке «Нет».
5. При переходе по стрелке «Да» необходимо корректировать параметры телекамеры, а при переходе по стрелке «Нет» корректировку параметров телекамеры проводить не надо.
6. Если процесс пошел по стрелке «Да», то производится расчет новых значений коэффициента преобразования телекамеры (ТК).
7. Новые значения коэффициента преобразования вводятся в ТК, после чего процесс возвращается к этапу 2 и выполнения последующих этапов 3, 4 и, если условия этапа 4 не выполняются, то и к переходу к этапам 5, 6.
8. Если процесс пошел по стрелке «Нет», то определяются координаты точки изображения с максимальным значением сигнала.
9. Сравнение числа проведенных измерений n с заданным числом измерений N. Если n<N, процесс пойдет по стрелке «Да» и перейдет к выполнению этапов 2, 3, 4, 7 и 8. Последние будут выполняться до тех пор, пока не наступит равенство n=N, после чего выполнение процесса пойдет по стрелке «Нет».
10. Значения измеренных координат точки с максимальным значением сигнала накапливаются до тех пор, пока число измерений n не станет равным заданному числу измерений N. После того как наступит момент равенства n=N, производятся вычисления средних значений координат точки изображения с наибольшим значением сигнала в системе координат приемника телекамеры.
11. Расчет смещения усредненного положения точки изображения с максимальным значением сигнала относительно пространственной системы координат, связанной с реальным объектом.
12. Сохранение и визуализация результатов измерений.
Таким образом, в предлагаемом изобретении факторами повышения точности непрямолинейности на больших дистанциях являются простота конструкции и юстировки устройства, а также упрощение методики контроля и удобства проведения измерений благодаря реализации в вычислительном блоке особого алгоритма преобразования измерительного сигнала, разработанного для предлагаемого лазерного устройства.
Предлагаемый лазерный измеритель непрямолинейности с наибольшей эффективностью решает целый ряд проблемных задач метрологического и технологического характера при изготовлении сложных крупногабаритных изделий, при выполнении контрольно-измерительных, разметочно-поверочных и монтажных операций на современных промышленных предприятиях. Его применение позволит также:
- повысить надежность изготавливаемых объектов, повысить их техническую безопасность в процессе их эксплуатации;
- повысить производительность контроля;
- обеспечить возможность полной или частичной автоматизации процесса контроля и управления технологическими процессами и объектами;
- снизить себестоимость контрольно-измерительных операций;
- обеспечить предельную простоту, наглядность и удобство в работе.
Источники информации
1. Лазерный интерферометр XL-80 фирмы RENISHAW, Англия.
2. Система измерительная лазерная FIXTURLASER LEVEL фирмы…, Швеция.
3. Патент RU 2196300 С1 класс G01B 11/00, опубликовано 10.06.2006. БИ 16/2006.
4. Вагнер Е.Г. Контроль объектов машиностроения по кольцевой структуре лазерного луча. - Измерительная техника, №4, 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ НЕПРЯМОЛИНЕЙНОСТИ | 2015 |
|
RU2603999C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2013 |
|
RU2534811C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 2016 |
|
RU2638110C1 |
| ОПТИЧЕСКИЙ ПРОФИЛОМЕТР | 1994 |
|
RU2085840C1 |
| ПОЛЯРИЗАЦИОННАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА ПО СТВОЛУ НАРЕЗНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2023 |
|
RU2805642C1 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ ПОВЕРХНОСТИ | 2016 |
|
RU2650840C1 |
| ДОПЛЕРОВСКИЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2019 |
|
RU2727778C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 2020 |
|
RU2745341C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 2000 |
|
RU2175753C1 |
| АКУСТООПТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ СМЕЩЕНИЙ | 2013 |
|
RU2523780C1 |

Измеритель может быть использован для контроля формы и взаимного расположения поверхностей крупногабаритных изделий и объектов на расстояниях до 100 метров и более. Измеритель содержит лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку. Оптическая система состоит из отрицательной линзы и аксикона с двумя сферическими поверхностями с радиусами R1 и R2, при этом . В качестве фотоприемника установлена цифровая телекамера с возможностью регулирования коэффициента преобразования оптических сигналов в электрические. Вычислительный блок принимает сигналы выделенного кадра и измеряет координаты точки изображения с максимальной яркостью. Определяется наибольшая величина видеосигнала и, если она меньше максимального допустимого или больше заданного, то производится многократное измерение с последующим усреднением и пересчетом результатов в смещение относительно реальной системы координат, связанной с исследуемым объектом. В противном случае производится корректировка коэффициента преобразования телекамеры до значения, при котором максимальный сигнал телекамеры был бы меньше максимально допустимого и больше заданного. Технический результат - упрощение конструкции и повышение точности измерений непрямолинейности на расстояниях до 100 метров и более. 4 ил.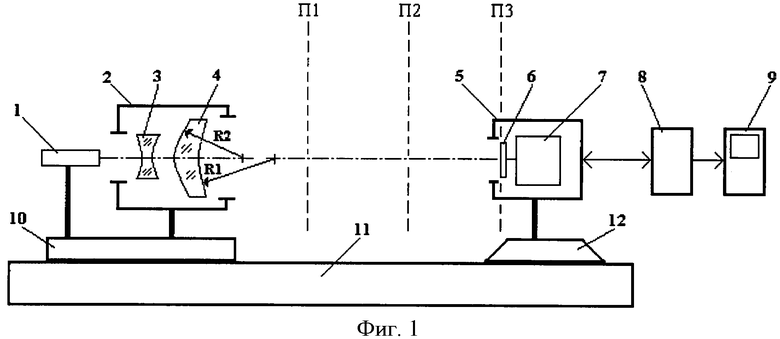
Лазерный измеритель непрямолинейности, содержащий лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку, отличающийся тем, что оптическая система состоит из двух компонентов, первым из которых является отрицательная линза, а второй выполнен в виде аксикона с двумя сферическими поверхностями с радиусами R1 и R2, при этом , а в качестве фотоприемника установлена цифровая телекамера с возможностью регулирования коэффициента преобразования оптических сигналов в электрические, а вычислительный блок, реализующий алгоритм приема сигналов выделенного кадра телекамеры и измеряющий координаты точки изображения с максимальной яркостью с последующим усреднением результатов измерений, выполнен с возможностью корректировки параметров телекамеры.
| Вагнер Е.Г | |||
| Контроль объектов машиностроения по кольцевой структуре лазерного луча // Измерительная техника | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ ПРЯМОЛИНЕЙНОСТИ | 1994 |
|
RU2094756C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ПЕРЕМЕЩЕНИЙ | 2001 |
|
RU2196300C1 |
| JP 5034129 A, 09.02.1993 | |||
| JP 3078609 A, 03.04.1991 | |||
| Устройство для контроля прямолинейности | 1984 |
|
SU1165882A1 |

