Изобретение относится к измерительной технике и может быть использовано для контроля формы и взаимного расположения поверхностей крупногабаритных изделий и объектов на расстояниях до 100 метров и более, для определения взаимного разворота поверхностей друг относительно друга, для параллельного переноса визирной линии и передачи на расстояние базового направления. Такие задачи часто встречаются, но иногда трудно решаются, особенно если контролируются и юстируются объекты сложных конфигураций или из-за специфических условий, в которых производится монтаж и сборка крупногабаритных объектов, например контроль и установка зеркал Имитатора Солнечного Излучения, многоэлементных зеркал телескопов большого диаметра.
Известно устройство пространственной ориентации объектов, решающее задачу переноса направления вектора из одной плоскости в другую, в частности для контроля плоскостности поверхностей (Авт. св. СССР, 741045, МПК G01B 11/30, приор. 28.12.77), содержащее два призменных отражателя с объективами, установленных на контролируемых поверхностях. Разворот ребер призменных отражателей, возникающий из-за неплоскостности контролируемой поверхности, приводит к смещению изображений. Погрешность измерений составляет 2,5 угл. сек. при точной юстировке. Дистанция измерений ограничивается фокусным расстоянием объективов. Недостатком является сложная юстировка.
Известны устройства пространственной ориентации объектов аналогичного принципа действия, основанных на свойстве прямоугольного отражателя поворачивать отраженное от него изображение предмета (патент России №2408840. 2009. и патент России 2478185.2011). Устройства состоят из двух отдельных блоков.
Блок 1 - задающий направление, содержит прямоугольный призменный отражатель, который располагается в случае передачи направления в плоскости базового направления. Пространственное положение ребра прямоугольного призменного отражателя задает базовое направление. Блок 2 содержит осветительно-приемное устройство и располагается на контролируемом объекте. Недостатком устройств является сложная конструкция и юстировка, кроме того, они могут работать только на строго фиксированном расстоянии, определяемом фокусным расстоянием объектива, и применение их ограничивается вертикальной передачей азимутального направления. Точность передачи направления составляет 5 угловых секунд.
В современных технологиях пространственного контроля сложных крупногабаритных объектов на больших расстояниях эффективно использование лазерных оптических приборов, в которых за базовую прямую принимают луч лазера. Известны лазерные интерферометры для измерения отклонений от прямолинейности на больших расстояниях, например лазерный интерферометр X L-80 фирмы RENISHAU, Англия [3] и система измерительная лазерная FIXTURLASER LEVEL, Швеция [4].
При работе с лазерными интерферометрами необходима строгая компенсация воздействия изменений условий окружающей среды с помощью специальных датчиков, неточность которых изменяет длину волны и приводит к ошибке измерений. Существенными недостатками лазерных интерферометров являются требование предварительной обработки результатов измерений и исчезновение интерференционной картины, а следовательно, и результатов измерений, при случайном перекрытии лазерного пучка. Несмотря на высокую точность (±0,5 мкм/м), из-за сложности изготовления, юстировки, настройки в процессе эксплуатации, проблем аттестации и поверки, применение интерферометров в производственных условиях ограничено.
Более близким по технической сущности к предлагаемому изобретению является лазерный измеритель непрямолинейности (Патент России №2457434. 2010). Измеритель содержит лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку. Измеритель обладает высокими точностными характеристиками, которые сохраняются на всей трассе измерения (до 100 метров и более).
Погрешность измерения непрямолинейности составляет 1,0 мкм/м. Но стабильность базового направления создается только вдоль лазерного излучения. Прибор не осуществляет параллельного переноса базового направления, т.е. передачу направления в пространстве, вследствие чего ограничиваются функциональные возможности применения высокоточного лазерного измерителя непрямолинейности.
В предлагаемом изобретении устранены недостатки выше указанного устройства.
Целью предлагаемого изобретения является создание высокоточного устройства со стабильным базовым направлением лазерного луча с возможностью передачи стабильного базового направления в пространстве в трех направлениях на больших дистанциях.
Второй целью является расширение функциональных возможностей лазерного измерителя непрямолнейности.
Эти цели достигаются тем, что устройство определения пространственной ориентации объектов, содержащее лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку, снабжается кареткой, которая имеет возможность перемещения по направляющим в горизонтальной и вертикальной плоскостях. Лазер и оптическую систему, создающую стабильное базовое направление, располагают на подвижной каретке. Для исключения влияния ошибок направляющих при перемещении каретки в интересах сохранности стабильного базового направления на каретку дополнительно устанавливают уровень и прямоугольный призменный отражатель, ребро прямого угла которого параллельно базовому направлению, и который оптически связан с автоколлимационной лазерной трубкой. На каретке размещают также светоделитель при контроле расположения объектов с плоскими поверхностями.
На фиг.1 представлена принципиальная схема устройства определения пространственной ориентации объектов, где лазер и оптическая система, создающая стабильное базовое направление путем образования кольцевой структуры лазерного луча, смонтированные в корпусе 1, расположены на каретке 2, которая имеет возможность перемещения по направляющим 3 и 4. На подвижной каретке установлены также уровень 5 и прямоугольный призменный отражатель 6, ребро прямого угла которого оптически связано с автоколлимационной лазерной трубкой 7. Телекамера 8 с фотоприемником подключена к вычислительному блоку 9. Телекамера может быть установлена или на подвижной каретке 2 или на отдельной стойке 10 около вычислительного блока 9. Контролируемый крупногабаритный объект 12, например пятиметровое зеркало, состоит из большого числа зеркальных сегментов, плоских или сферических, которые требуется установить в одну плоскость.
Устройство работает следующим образом. Лазерный пучок в виде кольцевой структуры, образованной оптической системой, направляют на один из контролируемых сегментов крупногабаритного объекта перпендикулярно его поверхности, например на центральный сегмент, и принимают его за базовый сегмент. Отраженный от контролируемой поверхности лазерный пучок направляется на фотоприемник телекамеры 8. На экране компьютера наблюдают отраженный от контролируемого сегмента лазерный пучок в виде кольцевой структуры с ярко выраженным центральным световым пятном и с заданной точностью устанавливают его по двум координатам сетки компьютера в нулевое положение (фиг.2). Оптическую ось автоколлимационной лазерной трубки 7 устанавливают перпендикулярно ребру прямого угла отражателя 6, а так как ребро параллельно лучу лазера, следовательно, это нулевое положение автоколлимационной лазерной трубки принимают за базовое и жестко фиксируют.
Каретка с оптическими узлами устройства перемещается по вертикальной направляющей, которая в свою очередь перемещается по горизонтальной направляющей. В результате, каретка, на которой расположены лазер и оптическая система, создающая стабильное базовое направление, может быть расположена напротив любого контролируемого сегмента. И, наблюдая отраженное от него изображение кольцевой структуры лазерного луча на экране монитора, определяют в двух координатах положение каждого контролируемого сегмента относительно базового сегмента. В каждом случае, до снятия отсчета, проверяют нулевое положение автоколлимационной лазерной трубки, в противном случае (возможном вследствие ошибок направляющих), нулевой отсчет, а следовательно, и положение стабильного базового направления восстанавливают регулировочными винтами каретки, разворачивая каретку в горизонт с помощью уровня. В другом направлении разворачивают каретку вместе с прямоугольным призменным отражателем, пока изображение от отражателя не придет в нулевое положение автоколлимационной лазерной трубки. При этом положении призменного отражателя его ребро параллельно базовому направлению, что соответствует сохранности стабильности при передаче базового направления от одного контролируемого объекта к другому. Погрешность измерений составляет 1 мкм/м. Так как все контролируемые сегменты имеют регулировочные механизмы, с помощью заявляемого устройства, при необходимости, они устанавливаются в заданное расчетное положение.
Таким образом, показано, что заявляемое устройство имеет существенные отличительные признаки.
Во-первых, устройство снабжено направляющими и кареткой, которая имеет возможность перемещения. На каретке установлены лазер и оптическая система, создающая стабильное базовое направление путем образования кольцевой структуры лазерного луча. Технический эффект - возможность параллельной передачи стабильного базового направления к контролируемым объектам, разнесенным в пространстве друг относительно друга на значительные расстояния.
Во-вторых, в предлагаемом устройстве применена система компенсации ошибок направляющих, которая содержит уровень, прямоугольный призменный отражатель, ребро прямого угла которого параллельно базовому направлению, и автоколлимационную лазерную трубку, оптически связанную с призменным отражателем. Благодаря этому, при передаче направления сохраняется стабильность базового направления в пространстве и нет необходимости изготовления точных направляющих.
Технический эффект - обеспечение высокой точности передачи направления при простой и дешевой конструкции устройства.
Заявляемое устройство определения пространственной ориентации объектов является уникальным высокоточным оптико-электронным средством контроля при простой конструкции и эксплуатации.
Достоинством устройства является также возможность проведения визуальных измерений, обеспечивающих наглядность и удобство контроля.
На нашем предприятии была разработана конструкторская документация и изготовлен действующий образец устройства определения пространственной ориентации объектов. Устройство после проведенных испытаний передано заказчику. Получены положительные результаты.
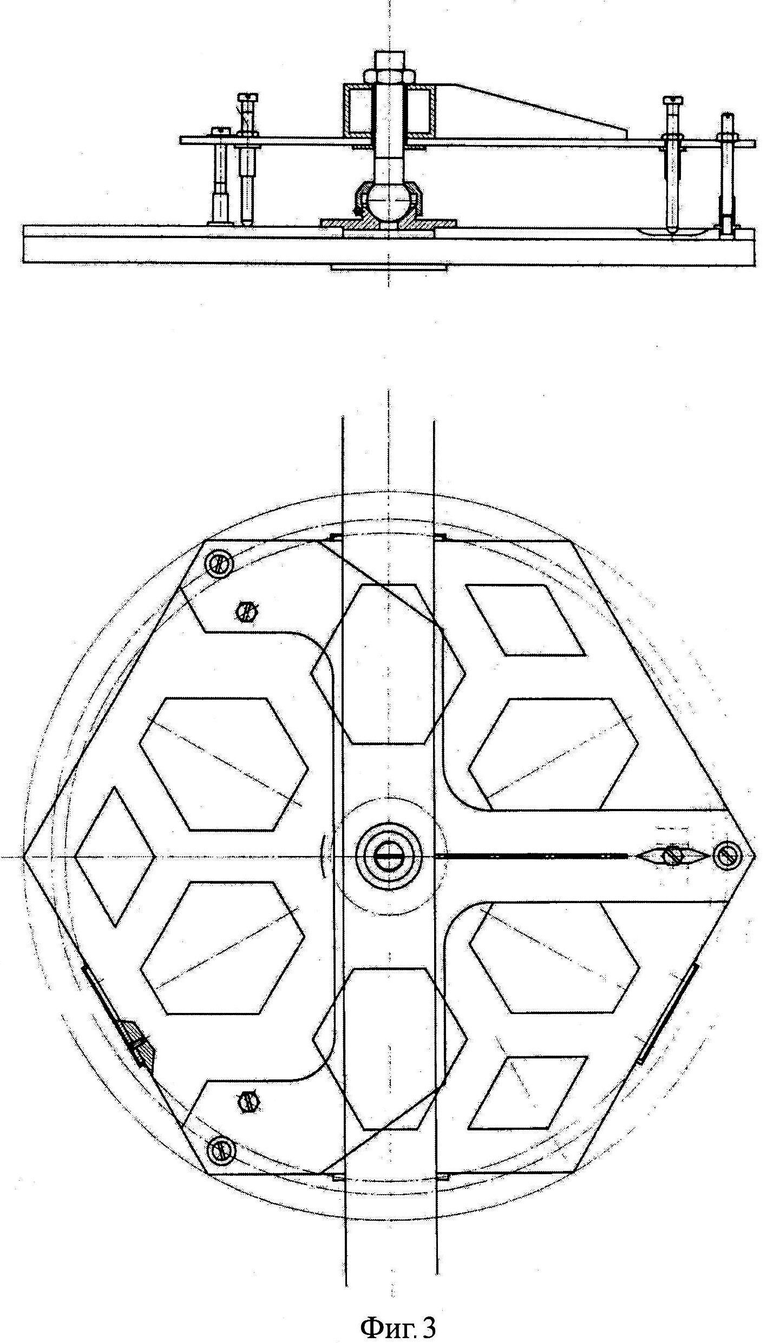
С помощью заявляемого устройства была решена успешно конкретная уникальная задача контроля и установки крупногабаритных зеркал Имитатора Солнечного Излучения диаметрами от 3,5 до 5,0 метров. Контролировались три главных сферических зеркала и три вторичных плоских зеркала. Каждое зеркало состояло из большого числа зеркальных сегментов сферических и плоских, которые и требовалось с помощью нашего устройства с требуемой точностью установить в одну сферическую или плоскую поверхность. Радиус поверхности сферического зеркала был равен 18 метров. Приемник должен был быть установлен в фокусе. На фиг.3 показана конструкция одного из контролируемых зеркал диаметром около пяти метров, составленная из сферических сегментов, положение которых юстировалось в процессе контроля.
Предложенное устройство многофункционально. Оно может решать с одинаковым успехом задачи взаимной ориентации объектов, передачи направления вектора, параллельности направлений и т.д. Например, его можно использовать для контроля формы поверхностей и деформации многоэлементных зеркал крупногабаритных телескопов, в судостроении: для контроля взаимного расположения рабочих цилиндров крупногабаритных компрессоров, дизелей по отношению к оси вала, для контроля соосности в атомном машиностроении и т.п. В настоящее время на базе предлагаемого устройства разрабатывается система контроля соосности более 120 отверстий атомного реактора в шахте глубиной до 13 метров. Работа проводится нами совместно с Атоммашем: идет конструирование и изготовление устройства для решения конкретной задачи в сложных условиях в труднодоступных местах на большой глубине. Контролируемые отверстия находятся в замкнутом объеме на различных уровнях измерительного канала, и в полном сборе корпуса реактора доступ к ним практически невозможен. Технический эффект заявляемого изобретения очевиден.
Литература
1. Делюнов Н.Ф., Леонтьева Г.В., Мясников Ю.А. Устройство для контроля плоскостности поверхностей. Авт. св. СССР №741045, МПК G01B 11/30, приор. 28.12.77.
2. Шевцов И.В., Чудаков Ю.И., Жуков Ю.П., Ловчий И.Л., Петров Л.П., Цветков В.И., Шевцов С.Е. Устройство определения пространственной ориентации объектов. Патент России №2408840. 2009.
3. Пинаев Л.В., Леонтьева Г.В., Николаева В.К. Устройство пространственной ориентации объектов. Патент России №2478185. 2011.
4. Лазерный интерферометр XL-80 фирмы RENISHAU, Англия.
5. Система измерительная лазерная FIXTURLASER LEVEL, Швеция.
6. Пинаев Л.В., Леонтьева Г.В., Бутенко Л.Н., Серегин А.Г. Лазерный измеритель непрямолинейности. Патент России №2457434.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРКИ РЕНТГЕНОВСКОЙ ОПТИЧЕСКОЙ СИСТЕМЫ, СОДЕРЖАЩЕЙ N ЗЕРКАЛЬНЫХ МОДУЛЕЙ | 2016 |
|
RU2629693C1 |
| УСТРОЙСТВО ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2001 |
|
RU2182311C1 |
| Интерферометр для измерения перемещений | 1980 |
|
SU934212A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2011 |
|
RU2478185C1 |
| ИНТЕРФЕРОМЕТР С ОБРАТНО-КРУГОВЫМ ХОДОМ ЛУЧЕЙ ДЛЯ КОНТРОЛЯ ФОРМЫ ВОГНУТЫХ СФЕРИЧЕСКИХ И АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ ОПТИЧЕСКИХ ДЕТАЛЕЙ | 1979 |
|
SU786471A1 |
| ЛАЗЕРНЫЙ АВТОКОЛЛИМАЦИОННЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2002 |
|
RU2224243C1 |
| ЛАЗЕРНЫЙ ОТВЕС | 2015 |
|
RU2591741C1 |
| ОПТИЧЕСКАЯ СИСТЕМА СТЕНДА ДЛЯ ИЗМЕРЕНИЯ ГОРИЗОНТАЛЬНОГО УГЛА | 2013 |
|
RU2563322C2 |
| Интерферометр для контроля качества оптических поверхностей и систем | 1990 |
|
SU1765803A1 |

Устройство предназначено для контроля формы и взаимного расположения поверхностей крупногабаритных изделий и передачи направления на расстояниях до 100 метров и более. Устройство содержит лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку. Лазер и оптическая система, создающая стабильное базовое направление, расположены на каретке, которая имеет возможность перемещения по направляющим в горизонтальной и вертикальной плоскостях. Для исключения влияния ошибок направляющих на точность перемещения каретки в интересах передачи и сохранности стабильного базового направления на каретке дополнительно установлены уровень и прямоугольный отражатель, ребро прямого угла которого параллельно базовому направлению и который оптически связан с автоколлимационной лазерной трубкой. Вследствие этого нет необходимости изготовления точных направляющих. На подвижной каретке также устанавливают светоделитель для контроля расположения объектов с плоскими поверхностями. Заявленные в предлагаемом устройстве отличительные признаки позволяют осуществлять контроль и установку поверхностей сложной конфигурации, объектов больших размеров, расположенных на больших расстояниях, определять взаимный разворот разнесенных в пространстве объектов, осуществлять параллельный перенос и передачу на расстояние базового направления. При этом решаются технологические и метрологические задачи, которые ранее либо совсем не решались, либо выполнялись с недостаточной точностью. Например, появляется возможность осуществлять контроль и установку таких объектов, как зеркала Имитатора Солнечного Излучения, многоэлементные зеркала телескопов большого диаметра, составленные из отдельных зеркальных сегментов, осуществлять контроль соосности отверстий атомного реактора в труднодоступных местах в шахте глубиной более 13 метров. Технический эффект - простыми средствами и с высокой точностью (1 мкм/м) появляется возможность осуществлять передачу в пространстве по трем координатам стабильного базового направления, созданного кольцевой структурой лазерного луча. 3 ил.
Устройство определения пространственной ориентации объектов, содержащее лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку, отличающееся тем, что лазер и оптическая система установлены на каретке, которая имеет возможность перемещения по горизонтальной и вертикальной направляющим, на каретке также расположен светоделитель с возможностью отключения, и в интересах сохранности базового направления для исключения влияния ошибок направляющих установлены уровень и прямоугольный призменный отражатель, ребро которого параллельно базовому направлению и который оптически связан с автоколлимационной лазерной трубкой.
| WO 2012065267 A1, 24.05.2012 | |||
| US 8203702 B1, 19.06.2012 | |||
| US 7466411 B2, 16.12.2008 | |||
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2146354C1 |

