Изобретение относится к области оптико-электронного приборостроения, а точнее к оптико-электронным обзорным системам, в частности к ИК теплопеленгаторам, предназначенным для поиска и сопровождения ИК объектов в заданной зоне обзора. Оно может быть использовано для обнаружения и контроля за движением летательных аппаратов, а также наземных и водных транспортных средств.
Известны оптико-электронные системы, описанные в монографии [Павлов А.В. Оптико-электронные системы. М., Энергия, 1974, с.218-230], осуществляющие поиск и сопровождение излучающих объектов, имеющие в своем составе входную оптическую систему, двухкоординатное поворотное устройство, фотоприемное устройство с блоками обработки продетектированных сигналов, и построенные на основе следующих принципов.
1. Растровые системы, в которых расчленение поля зрения осуществляется с помощью растра (кодирующего устройства), расположенного в плоскости изображения. Недостатком этих систем является низкая чувствительность и угловое разрешение аппаратуры.
2. Системы, сканирующие поле обзора с использованием многоэлементных линеек фотоприемников (системы строчно-кадрового обзора). Системы этого типа, кроме двухкоординатного поворотного устройства, могут иметь встроенное однокоординатное устройство, формирующее изображение в отдельных кадрах зоны обзора. Недостатком этих систем является малое время накопления сигнала и, как следствие, пониженная чувствительность аппаратуры.
3. Системы на базе мозаичных (матричных) фотоприемников. Недостатком этих систем является низкая скорость сканирования зоны обзора, обусловленная требованиями по угловому разрешению и чувствительности аппаратуры, так как в данном случае скорость сканирования ограничивается отношением углового разрешения и времени накопления сигнала.
Наиболее близким устройством того же назначения, что и заявляемое, по совокупности существенных признаков, является теплопеленгатор [Патент RU №2396574, БИ №22, 2010], выбранный нами в качестве прототипа. Теплопеленгатор оснащен двухкоординатным сканирующим зеркалом, системой приводов и датчиков контроля углового положения, входным телескопом, двухкоординатным дефлектором с системой приводов и датчиков, объективом и матричным фотоприемным устройством (МФПУ), расположенным на неподвижной платформе. Все приводы снабжены датчиками углового положения и совершают функционально связанные движения. При противоходе зеркала дефлектора, относительно направления сканирования зоны обзора, формируется интервал околонулевых скоростей оптической оси всей системы, в течение которого осуществляется экспонирование фотоприемного устройства.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного теплопеленгатора, относятся следующие.
Недостатком данной системы является то, что в процессе сканирования зоны обзора присутствует межкадровый поворот фрагментов изображения контролируемой зоны, вследствие чего для заполнения контролируемой зоны без пропусков фрагментов контролируемого пространства требуется существенно большее число экспонированных кадров по сравнению с регулярным заполнением и, соответственно, возрастает время обзора и, как следствие, снижается эффективность работы системы.
Вариант компоновки оптической схемы телопеленгатора-прототипа, приведенный в примере 1 описания прототипа, в составе телеобъектив + дефлектор + проекционный объектив, не позволяет увеличить время накопления сигналов, так как при повороте дефлектора фокальная плоскость телеобъектива совпадает с предметной плоскостью проекционного объектива только в момент совпадения оптических осей телеобъектива и проекционного объектива, в который и формируется изображение в плоскости установки фокальной матрицы (FRA).
В варианте компоновки оптической схемы, приведенной в примере 2 описания теплопеленгатора-прототипа, включающей телескоп + дефлектор + объектив, зеркало дефлектора, установленное перед объективом, будет иметь значительные размеры. При карданном подвесе второй колебательной системы, включающей дефлектор с приводом и датчиком системы компенсации радиального сдвига изображения и жесткой связью с якорем двигателя, обеспечивающего колебания всего подвеса с кадровой частотой в перпендикулярной плоскости, теплопеленгатор будет функционировать только при сравнительно низких кадровых частотах, то есть при малой скорости обзора контролируемой зоны. С ростом частоты требуемые моменты вращения, создаваемые двигателем, возрастают как квадрат частоты в случае гармонических колебаний и существенно выше при других видах колебаний. В результате начинают проявляться упругие свойства конструктивных элементов подвеса, возникновение механических резонансов и, как следствие, потеря управления дефлектором.
При упругом торсионном подвесе дефлектора могут быть реализованы довольно высокие частоты колебаний, но при этом можно компенсировать только один вид сдвига изображения, радиальный или продольный. При попытке компенсировать таким образом оба вида сдвига изображения получается двухступенчатый маятник, причем вторая ступень будет колебаться в плоскости, отличной от плоскости колебаний первой ступени. Результирующие колебания дефлектора будут носить труднопрогнозируемый характер, при этом не будет компенсироваться ни один вид сдвига изображения. Для обеспечения достаточно большого ресурса работы дефлектора с торсионным упругим подвесом, ограниченного усталостью материала упругого элемента, такой конструктив должен иметь довольно большие габариты.
К общим для всех видов подвеса дефлектора недостаткам относятся следующие.
1. В оптико-механическую систему теплопеленгатора включаются мощные источники вибраций, воздействующих на его конструктивные элементы в различных плоскостях, что приводит к размыванию кружка рассеяния входного объектива и, как следствие, ухудшению углового разрешения и дальности обнаружения цели.
2. Наличие значительных воздушных промежутков между оптическими компонентами приводит к возрастанию их световых апертур на величину ΔDсв=2l·tqω, где l - длина промежутка, ω - угловая апертура промежутка, и росту весогабаритных показателей системы в целом.
3. Ухудшение углового разрешения, обусловленное волновыми деформациями поверхности зеркала дефлектора при его колебаниях с высокой частотой. Волновые деформации от жесткости зеркала не зависят и определяются частотой колебаний, световым диаметром дефлектора и скоростью распространения волны упругих напряжений вдоль поверхности зеркала.
Сущность изобретения заключается в следующем.
Изобретение направлено на решение задачи создания компактного малогабаритного теплопеленгатора с большой скоростью сканирования заданной зоны пространства, а также с высокой чувствительностью и угловым разрешением.
Технический результат заключается в достижении сканирования теплопеленгатором заданной зоны пространства с высокой кадровой частотой, уменьшении времени обзора при обеспечении высокого углового разрешения и пороговой чувствительности аппаратуры. Теплопеленгатор характеризуется высокой эффективностью работы по поиску, обнаружению и сопровождению ИК объектов в заданной зоне пространства. Заявляемая в изобретении конструкция устройства позволяет сделать его компактным с малыми весогабаритными характеристиками.
Техническим результатом изобретения является также расширение арсенала имеющихся в настоящее время оптико-электронных средств обнаружения ИК объектов на небесном фоне или на фоне подстилающей поверхности.
Указанный выше технический результат достигается тем, что в теплопеленгатор, содержащий последовательно расположенные на оптической оси оптически сопряженные двухкоординатную оптическую сканирующую систему, снабженную датчиками положения и приводами вращения, выполненную с возможностью вращения сканирующей системы вокруг вертикальной и горизонтальной осей по командам от блока управления приводами, объектив, матричное фотоприемное устройство с блоком управления матричным фотоприемным устройством, а также электронные и вычислительные блоки, связанные с матричным фотоприемным устройством и блоком управления приводами, в соответствии с заявляемым техническим решением дополнительно введены расположенные после двухкоординатной оптической системы оптически сопряженные телескоп с встроенным уголковым зеркалом, при этом уголковое зеркало снабжено датчиком положения и приводом вращения и выполнено с возможностью вращения вокруг вертикальной оси по командам от блока управления приводами, два оптических клина, снабженные датчиками положения и приводами вращения, выполненные с возможностью вращения вокруг вертикальной оси с одинаковой угловой скоростью в противоположных направлениях по командам от блока управления приводами, при этом блок управления приводами связан с датчиками положения и приводами вращения вращающихся узлов теплопеленгатора и выполнен с возможностью формирования синхронизированных траекторий движения этих узлов, функционально связанных с кадровой частотой матричного фотоприемного устройства, а электронные и вычислительные блоки включают в себя блок первичной обработки сигнала, выполненный с возможностью формирования кадра изображения с адресами контрастных пикселей и текущими координатами оптической оси, связанный с блоком вторичной обработки данных, выполненным с возможностью определения координат действительных целей по их излучению и сопровождения их и имеющим входы и выходы для связи с центральным блоком управления, выполненным с возможностью отображения текущей информации и задания режимов работы блока управления матричным фотоприемным устройством и блока управления приводами, имеющим входы и выходы для связи с внешними устройствами.
Если в теплопеленгаторе двухкоординатная оптическая сканирующая система включает в себя призму-куб, размещенную на горизонтальной платформе, при этом горизонтальная платформа и призма-куб снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной оси, соответственно, то это характеризует вариант реализации теплопеленгатора с малым диаметром входного зрачка.
Если в теплопеленгаторе двухкоординатная оптическая сканирующая система включает в себя первое и второе плоские зеркала, размещенные на горизонтальной платформе, при этом первое зеркало неподвижно относительно горизонтальной платформы, плоскости первого и второго зеркал параллельны друг другу и расположены под углом 45° к горизонтальной оси, горизонтальная платформа и второе зеркало снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной оси соответственно, то это характеризует вариант реализации теплопеленгатора с большим диаметром входного зрачка.
Если в теплопеленгаторе двухкоординатная оптическая сканирующая система включает в себя подвижное плоское зеркало, размещенное на горизонтальной платформе под углом 45° к горизонтальной оси, при этом горизонтальная платформа и подвижное зеркало снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной оси соответственно, то это характеризует вариант реализации теплопеленгатора для систем со сравнительно малым размером зоны обзора по угломестной координате.
Совокупность вышеизложенных признаков изобретения связана причинно-следственной связью с техническим результатом изобретения.
В процессе поиска цели с использованием двухкоординатной оптической сканирующей системы при неподвижных объективе и фотоприемном устройстве, формируемое изображение фрагментов зоны обзора имеет две составляющих движения: поворот и смещение в направлении сканирования.
Введение телескопа с вращающимся уголковым зеркалом позволяет компенсировать поворот изображения, обусловленный вращением элементов двухкоординатной сканирующей системы, и осуществить перевод текущего изображения из вращающейся системы координат в неподвижную систему координат. Дополнительное введение в оптическую схему оптических клиньев, вращающихся в противоположных направлениях с одинаковой угловой скоростью, позволяет сформировать временной интервал, в котором скорость смещения изображения равна или близка к нулю, в течение которого и осуществляется накопление сигнала.
Если задать частоту оборотов клиньев равной кадровой частоте МФПУ, то в результате обеспечивается покадровая съемка с фиксированным положением кадров заданной контролируемой зоны. За временной интервал, в который происходит считывание сигналов, накопленных МФПУ, реализуется переброс линии визирования в точку экспонирования следующего кадра.
Теплопеленгатор выполнен с возможностью формирования синхронизированных траекторий движения вращающихся узлов, функционально связанных с кадровой частотой матричного фотоприемного устройства.
В связи с тем, что вращение клиньев осуществляется с постоянной угловой скоростью, а сами клинья создают малые механические нагрузки на осевую систему, возможно достижение больших скоростей вращения и, следовательно, кадровой частоты и скорости сканирования системы в целом. Скорость обзора увеличивается также и в связи с отсутствием поворота изображения в экспонированных кадрах.
Отсутствие колебательных движений в оптико-механической системе по сравнению с устройством-прототипом, которые сопровождаются возникновением разного рода деформаций в элементах конструкции и оптических элементах системы, позволяет обеспечить высокую скорость сканирования без ухудшения пороговой чувствительности аппаратуры. В совокупности введенные изменения в структурной схеме устройства существенно повышают эффективность его работы.
Электронные и вычислительные блоки, связанные с матричным фотоприемным устройством и блоком управления приводами, выполнены в заявляемом устройстве в виде трех блоков - блока первичной обработки сигнала, блока вторичной обработки данных и центрального блока управления.
Блок первичной обработки сигналов (БПО) выполняет операции компенсации геометрического шума, обусловленного разбросом чувствительности элементов МФПУ, отслеживает средний уровень фона и управляет временем накопления сигнала, осуществляет двумерную пространственную фильтрацию полученного изображения, выделение контрастных пикселей полученного изображения и формирует кадр с адресами контрастных пикселей и текущими координатами оптической оси.
Выход блока первичной обработки сигналов подсоединен ко входу блока вторичной обработки данных (БВО), который в соответствии с заданными алгоритмами формирует изображение фоноцелевой обстановки в контролируемой зоне, осуществляет селекцию действительных и ложных целей, завязывает трассы их сопровождения и транслирует координаты выделенных целей в блок управления приводами.
Блок вторичной обработки данных связан с центральным блоком управления ЦБУ. ЦБУ отображает текущую информацию, данные из БВО и данные мониторинга исполнительных устройств, транслируемые блоком управления приводами, осуществляет задания режимов работы блока управления МФПУ и блока управления приводами, а также служит для обмена информацией с внешними устройствами.
Различные схемы исполнения двухкоординатной оптической сканирующей системы с использованием призмы-куба или двух плоских зеркал позволяют реализовать варианты теплопеленгатора с малым и большим диаметрами входного зрачка соответственно. При замене призмы-куба одним плоским зеркалом возможен также случай реализации теплопеленгатора для небольших зон обзора по угломестной координате.
Во всех вариантах исполнения теплопеленгатора реализуется плотная, с минимальными воздушными промежутками, компоновка оптико-механических узлов системы, что обеспечивает минимальные весогабаритные характеристики аппаратуры.
Заявляемый теплопеленгатор является новым и расширяет арсенал имеющихся в настоящее время оптико-электронных средств обнаружения ИК объектов на небесном фоне или на фоне подстилающей поверхности. При этом к достижению технического результата приводит совокупное действие всех признаков изобретения.
На Фиг.1 приведена структурная схема заявляемого теплопеленгатора в варианте его реализации, когда двухкоординатная сканирующая система включает в себя призму-куб. На Фиг.1 представлены: 1 - призма-куб, 2 - привод вращения призмы-куба вокруг горизонтальной оси, 3 - датчик углового положения призмы-куба, 4 - горизонтальная платформа, 5 - привод вращения горизонтальной платформы 4 вокруг вертикальной оси, 6 - датчик углового положения горизонтальной платформы, 7 - телескоп, 8 - уголковое зеркало телескопа, 9 - привод вращения уголкового зеркала телескопа, 10 - датчик углового положения уголкового зеркала телескопа, 11, 12 - оптические клинья, вращающиеся в противоположных направлениях с одинаковой угловой скоростью, 13, 14 - приводы вращения клиньев 11, 12 соответственно, 15, 16 - датчики углового положения клиньев 11, 12 соответственно, 17 - объектив, 18 - МФПУ, 18А - фоточувствительные элементы МФПУ, 19 - апертурная диафрагма МФПУ, 20 - входное окно МФПУ, 21 - микросхема считывания сигналов МФПУ, 22 - блок первичной обработки сигналов (БПО), 23 - блок управления МФПУ, 24 - блок вторичной обработки данных (БВО), 25 - центральный блок управления, 26 - блок управления приводами (БУП), 27 - обтекатель.
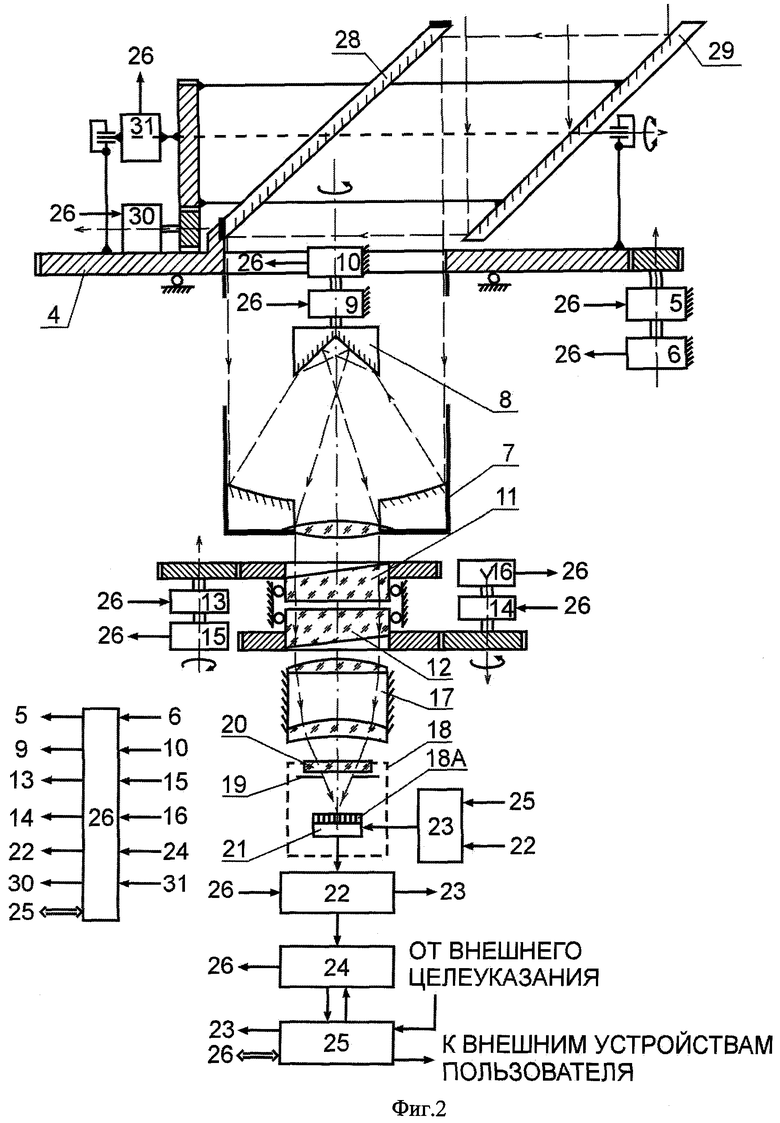
На Фиг.2 приведена структурная схема заявляемого теплопеленгатора в варианте его реализации, когда двухкоординатная сканирующая система включает в себя неподвижное и подвижное плоские зеркала, установленные на горизонтальной платформе. На Фиг.2 представлены 28 - первое плоское зеркало, неподвижно размещенное на горизонтальной платформе, 29 - второе подвижное плоское зеркало, размещенное на горизонтальной платформе, 30 - привод вращения второго плоского зеркала вокруг горизонтальной оси, 31 - датчик углового положения второго плоского зеркала, 4 - горизонтальная платформа, 5 - привод вращения горизонтальной платформы 4 вокруг вертикальной оси, 6 - датчик углового положения горизонтальной платформы, 7 - телескоп, 8 - уголковое зеркало телескопа, 9 - привод вращения уголкового зеркала телескопа, 10 - датчик углового положения уголкового зеркала телескопа, 11, 12 - оптические клинья, вращающиеся в противоположных направлениях с одинаковой угловой скоростью, 13, 14 - приводы вращения клиньев 11, 12 соответственно, 15, 16 - датчики углового положения клиньев 11, 12 соответственно, 17 - объектив, 18 - МФПУ, 18А - фоточувствительные элементы МФПУ, 19 - апертурная диафрагма МФПУ, 20 - входное окно МФПУ, 21 - микросхема считывания сигналов МФПУ, 22 - блок первичной обработки сигналов (БПО), 23 - блок управления МФПУ, 24 - блок вторичной обработки данных (БВО), 25 - центральный блок управления, 26 - блок управления приводами.
Вращение призмы-куба 1 (в первом варианте исполнения теплопеленгатора) или первого зеркала 28 (во втором варианте исполнения теплопеленгатора), осуществляемое благодаря вращению горизонтальной платформы 4 вокруг вертикальной оси, обеспечивает сканирование теплопеленгатором пространства по азимутальной координате. Вращение призмы-куба 1 (в первом варианте исполнения теплопеленгатора) или второго зеркала 29 (во втором варианте исполнения теплопеленгатора) вокруг горизонтальной оси, формируемое приводами вращения этих узлов по командам от БУП, обеспечивает сканирование теплопеленгатором пространства по угломестной координате.
Спектральные чувствительности оптических компонентов теплопеленгатора и МФПУ согласованы и лежат в одном спектральном диапазоне.
Заявляемое устройство работает следующим образом. Двухкоординатная оптическая сканирующая система (поз.1-6 на Фиг.1 или поз.4-6, 28-31 на Фиг.2) осуществляет двухкоординатное сканирование контролируемой зоны по командам, поступающим из блока управления приводами 26. В процессе поиска тепловое излучение объектов поступает на оптический вход телескопа 7. Уголковое зеркало 8 при сканировании пространства вращается в направлении, противоположном направлению азимутальной развертки системы двухкоординатного сканирования, со скоростью, равной половине скорости азимутальной развертки для теплопеленгатора, выполненного в соответствии со схемой Фиг.1, и полусумме скоростей вращения горизонтальной платформы 4 и второго зеркала 29 для теплопеленгатора, выполненного по схеме Фиг.2. Вращение уголкового зеркала обеспечивает компенсацию поворота изображения, обусловленного вращением оптических элементов системы двухкоординатного сканирования.
После телескопа 7 пучок излучения поступает на вращающиеся в противоположных направлениях оптические клинья 11, 12, снабженные приводами 13, 14 и датчиками углового положения 15, 16. С выхода оптических клиньев световой пучок фокусируется объективом 17 на фоточувствительные элементы МФПУ. МФПУ 18 снабжен апертурной диафрагмой 19, входным окном 20, микросхемой считывания сигналов 21 и связан с блоком управления МФПУ 23, осуществляющим управление режимами работы МФПУ.
При ведении в оптическую схему оптических клиньев 11 и 12, вращающихся в противоположных направлениях с одинаковой угловой скоростью, равной кадровой частоте МФПУ, движение изображения в фокальной плоскости объектива 17 осуществляется с переменной скоростью. Подобрав временной интервал, в котором скорость смещения изображения равна или близка к нулю (когда оптические клинья составляют практически плоскопараллельную пластинку), можно осуществить в этот момент экспозицию МФПУ. Наши оценки показывают, что при кадровой частоте МФПУ fк=100 Гц и шаге сканирования по азимутальной координате в 512 пикселей, можно зафиксировать изображение на время до 0,2Т, где Т - длительность экспозиции кадра, равная Т=1/fк, что при fк=100 Гц составляет (1,5÷1,7) мс. В оставшееся время кадра осуществляется считывание сигналов с выходов МФПУ. К моменту экспозиции следующего кадра оптические клинья 11 и 12 завершают полный оборот и осуществляют фиксирование изображения в следующем фрагменте контролируемой зоны. Таким образом, при равенстве частоты оборотов клиньев кадровой частоте МФПУ осуществляется покадровая съемка с фиксированным положением кадров заданной контролируемой зоны.
С выходов МФПУ считанные сигналы поступают в БПО 22, который выполняет операции компенсации геометрического шума, обусловленного разбросом чувствительности элементов МФПУ, отслеживает средний уровень фона и управляет временем накопления сигнала, осуществляет двумерную пространственную фильтрацию полученного изображения, формирует кадр изображения с адресами контрастных пикселей и текущими координатами оптической оси.
Далее из БПО 22 информация поступает в БВО 24, который в соответствии с заданными алгоритмами осуществляет селекцию действительных и ложных целей, завязывает трассы их сопровождения и транслирует координаты выделенных целей в БУП 26. БВО связан с ЦБУ 25. ЦБУ отображает данные из БВО и данные мониторинга исполнительных устройств, транслируемые БУП 26, осуществляет задания режимов работы блока управления МФПУ 23 и БУП 26, а также служит для обмена информацией с внешними устройствами.
БУП 26 в режиме поиска цели формирует траекторные задания, синхронизированные с кадровой частотой МФПУ, в режиме сопровождения формирует траектории функционально связанные с текущими координатами цели, а также формирует сигналы управления приводами в соответствии с заданными траекториями и показаниями датчиков углового положения.
Обеспечение формирования траекторных заданий движущихся оптико-механических узлов пеленгатора, синхронизированных с кадровой частотой МФПУ, позволяет реализовать различные его режимы работы. Заявленный теплопеленгатор может работать в режиме непрерывного поиска целей и завязки трасс их сопровождения в информационном пространстве, а также в режимах циклического сопровождения цели (группы целей) по угломестной координате или непосредственного сопровождения выбранной цели (группы целей с последовательными перебросами оптической оси). В последнем случае, оптические клинья фиксируются в состоянии, когда они представляют собой плоскопараллельную пластинку, а остальные исполнительные устройства отслеживают текущие координаты сопровождаемой цели. Возможен также режим двухконтурного точного сопровождения цели, при котором малые угловые смещения цели отслеживаются взаимными поворотами оптических клиньев 11, 12, обладающими большими коэффициентами редукции (в данном случае, отношением угла поворота клиньев к углу отклонения оптической оси). В режиме непосредственного сопровождения цели МФПУ переводится в режим "окно" (субкадр, выделенный из общего кадра МФПУ), что позволяет существенно сократить время считывания сигналов и, тем самым, повысить кадровую частоту и, соответственно, точность сопровождения цели.
На Фиг.1 и 2 показаны варианты исполнения теплопеленгатора с малым и большим диаметрами входного зрачка соответственно. Возможен вариант исполнения теплопеленгатора в случае, если зона обзора имеет небольшие размеры по угломестной координате. В этом случае призма-куб может быть заменена плоским зеркалом. Работоспособность приведенных на Фиг.1, 2 схем проверена экспериментально.
Для обеспечения работоспособности теплопеленгатора в сложных климатических условиях оптическая система теплопеленгатора может защищаться обтекателем 27.
К настоящему времени разработано несколько вариантов аппаратно-программных средств для блока управления исполнительными элементами с частотой сервовычислений до 100 кГц с десятиразрядной дискретностью сигнала управления.
Общие принципы управления исполнительными устройствами с большой частотой сервовычислений описаны в работе [Оптический журнал, 2009 г., т.79, №9, стр.51-55].
Заявляемый теплопеленгатор позволяет осуществлять сканирование заданной зоны пространства с высокой кадровой частотой при оптимальном времени накопления сигналов и регулярном заполнении зоны обзора последовательностью экспонированных кадров, что обеспечивает существенно меньшую длительность обзора заданной зоны по сравнению с прототипом с сохранением высокой чувствительности и углового разрешения аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2011 |
|
RU2457504C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2008 |
|
RU2396574C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2471211C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
Изобретение относится к области оптико-электронного приборостроения. Достигаемый технический результат - обеспечение сканирования заданной зоны пространства с высокой кадровой частотой, уменьшение времени обзора при обеспечении высокого углового разрешения и пороговой чувствительности, при этом конструкция устройства компактна и обладает малыми весогабаритными характеристиками. Теплопеленгатор включает в себя оптически сопряженные двухкоординатную оптическую сканирующую систему (ДОСС), телескоп с встроенным уголковым зеркалом, два оптических клина (ОК), выполненных с возможностью вращения с одинаковой угловой скоростью в противоположных направлениях, объектив, матричное фотоприемное устройство (МФПУ), блок первичной обработки сигнала, блок вторичной обработки данных и центральный блок управления, при этом ДОСС выполнена с возможностью вращения вокруг вертикальной и горизонтальной оси, уголковое зеркало и два ОК снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной оси по командам от блока управления приводами (БУП), а БУП выполнен с возможностью формирования синхронизированных траекторий движения вращающихся узлов, функционально связанных с кадровой частотой МФПУ. Возможны варианты исполнения ДОСС, включающей в себя призму-куб или два плоских зеркала, размещенных на горизонтальной платформе, при этом горизонтальная платформа выполнена с возможностью вращения вокруг вертикальной оси, а призма-куб или второе из зеркал с возможностью вращения вокруг горизонтальной оси. 3 з.п. ф-лы, 2 ил.
1. Теплопеленгатор, содержащий последовательно расположенные на оптической оси, оптически сопряженные двухкоординатную оптическую сканирующую систему, снабженную датчиками положения и приводами вращения, выполненную с возможностью вращения сканирующей системы вокруг вертикальной и горизонтальной осей по командам от блока управления приводами, объектив, матричное фотоприемное устройство с блоком управления матричным фотоприемным устройством, а также электронные и вычислительные блоки, связанные с матричным фотоприемным устройством и блоком управления приводами, отличающийся тем, что теплопеленгатор дополнительно содержит расположенные после двухкоординатной оптической системы, оптически сопряженные телескоп с встроенным уголковым зеркалом, при этом уголковое зеркало снабжено датчиком положения и приводом вращения и выполнено с возможностью вращения вокруг вертикальной оси по командам от блока управления приводами, два оптических клина, снабженные датчиками положения и приводами вращения, выполненные с возможностью вращения вокруг вертикальной оси с одинаковой угловой скоростью в противоположных направлениях по командам от блока управления приводами, при этом блок управления приводами связан с датчиками положения и приводами вращения вращающихся узлов теплопеленгатора и выполнен с возможностью формирования синхронизированных траекторий движения этих узлов, функционально связанных с кадровой частотой матричного фотоприемного устройства, а электронные и вычислительные блоки включают в себя блок первичной обработки сигнала, выполненный с возможностью формирования кадра изображения с адресами контрастных пикселей и текущими координатами оптической оси, связанный с блоком вторичной обработки данных, выполненным с возможностью определять координаты действительных целей по их излучению и сопровождать их и имеющим входы и выходы для связи с центральным блоком управления, выполненным с возможностью отображения текущей информации и задания режимов работы блока управления матричным фотоприемным устройством и блока управления приводами, имеющим входы и выходы для связи с внешними устройствами.
2. Теплопеленгатор по п.1, отличающийся тем, что двухкоординатная оптическая сканирующая система включает в себя призму-куб, размещенную на горизонтальной платформе, при этом горизонтальная платформа и призма-куб снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной осей соответственно.
3. Теплопеленгатор по п.1, отличающийся тем, что двухкоординатная оптическая сканирующая система включает в себя первое и второе плоские зеркала, размещенные на горизонтальной платформе, при этом первое зеркало неподвижно относительно горизонтальной платформы, плоскости первого и второго зеркал параллельны друг другу и расположены под углом 45° к горизонтальной оси, горизонтальная платформа и второе зеркало снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной осей соответственно.
4. Теплопеленгатор по п.1, отличающийся тем, что двухкоординатная оптическая сканирующая система включает в себя подвижное плоское зеркало, размещенное на горизонтальной платформе под углом 45° к горизонтальной оси, при этом горизонтальная платформа и подвижное зеркало снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной осей соответственно.
| ТЕПЛОПЕЛЕНГАТОР | 2008 |
|
RU2396574C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И СОПРОВОЖДЕНИЯ | 2003 |
|
RU2237979C1 |
| КОСМИЧЕСКИЙ СКАНИРУЮЩИЙ ТЕПЛОПЕЛЕНГАТОР | 1992 |
|
RU2046369C1 |
| RU 2003108165 А, 27.09.2004 | |||
| US 2005001819 A1, 20.01.2005 | |||
| WO 2002075348 А2, 26.09.2002 | |||
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ СЕРДЕЧНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ДОСТАВКИ | 2018 |
|
RU2759657C2 |
| GB 2070879 A, 09.09.1981. | |||

