Изобретение относится к оптическому приборостроению и, в частности, к устройствам сканирования и стабилизации изображения окружающего пространства, сформированного оптической системой на матричных фотоприемных устройствах (МФПУ), в широком диапазоне угловых скоростей и может быть использовано при создании систем кругового обзора, сканирующих и следящих устройств в комплексах обнаружения и сопровождения объектов.
В системах кругового обзора (СКО) с непрерывным сканированием используются многоэлементные фотоприемные линейки, обеспечивающие формирование панорамного электронного изображения при постоянной скорости сканирования. В патенте US №4221966 от 05.03.1979 г. на вращающейся по азимуту платформе с приводом вращения и датчиком углового положения установлена оптическая система - зеркальный объектив с корректирующей линзой. В фокальной плоскости объектива установлено многоэлементное фотоприемное устройство в виде линейки фоточувствительных элементов. Привод платформы подключен к блоку управления, а многоэлементное фотоприемное устройство - к процессорному блоку с дисплеем. Управление СКО осуществляют компьютерной системой команд и управления.
В патенте RU №2189049 от 03.10.2001 г. применено два оптических канала, установленных на вращающейся платформе с приводом и датчиком углового положения. Оптические каналы последовательно переключаются на фоточувствительную линейку оптическим переключателем. Техническим результатом данного изобретения является повышение эффективности наблюдения за счет увеличения поля оперативного систематического обзора по вертикали при обеспечении минимальных потерь времени наблюдения всего поля обзора, затраченного на переключение зон обзора.
Недостатком СКО с применением фотоприемных устройств на линейках является малое время экспонирования (как правило, равное 64 мкс - стандартное время одной телевизионной строки), что требует для получения качественного изображения высокого уровня освещенности на местности. Кроме того, при установке СКО на подвижный носитель в процессе движения носителя возникают смазы изображения, вызванные колебаниями носителя.
МФПУ имеют существенно большее время экспонирования, вплоть до времени кадра, что позволяет вести обнаружение объектов при освещенности на местности в десятые и меньше доли люкса. Применение МФПУ в системах кругового обзора сдерживается необходимостью фиксирования изображения внешней обстановки с целью исключения его смаза. Чтобы не потерять качество телевизионного изображения смещение оптического изображения на МФПУ за время экспонирования не должно превышать размера пикселя.
Известны системы, в которых стабилизация осуществляется не всей оптической системой, а только ее отдельными элементами, например головным зеркалом или оптическими клиньями (Автоматическая стабилизация оптического изображения, под общей редакцией Д.Н.Еськова и В.А.Новикова, Ленинград, «Машиностроение», 1988 г., глава 3).
Недостаток таких систем состоит в необходимости применения двух систем: системы кругового обзора для обнаружения объектов и системы стабилизации для сопровождения и распознавания обнаруженного объекта. Применение двух систем требует большего пространства для их размещения, большой мощности источников электропитания. Кроме того, появляются зоны взаимного экранирования системами окружающего пространства.
От этого недостатка свободна оптико-пеленгационная система кругового обзора, в которой проблема обнаружения и распознавания объектов при круговом обзоре на больших дальностях решается путем комбинированного использования множества неподвижных широкопольных оптических систем и узкопольного оптико-электронного канала механического сканирования (патент RU №2356063 от 27.11.2007 г.). Поля обзора широкопольных оптических систем перекрывают без пропусков сканируемое пространство в азимутальной плоскости. Узкопольный оптико-электронный канал расположен в центре широкопольной оптической системы и включает поворотное зеркало, расположенное на оптической оси его объектива под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места. Узкопольный канал позволяет распознать объект на больших дальностях.
Недостаток этой системы состоит в ее громоздкости. Например, для обнаружения объектов типа КАМАЗ на расстояниях до 5 км оптимальное поле зрения оптической системы должно быть в пределах 6-10 градусов, а это значит, что число оптических каналов при круговом обзоре должно быть не менее 36. Для уменьшения оптических каналов требуется существенное увеличение поля зрения, что неизбежно ведет к соответствующему уменьшению дальности обнаружения объектов. Дополнительный оптический канал еще более усложняет конструкцию изделия. Кроме того, при установке устройства на подвижный носитель из-за отсутствия стабилизации происходит смаз оптического изображения на МФПУ.
Предлагаемое устройство призвано снизить указанные недостатки и обеспечить как стабилизацию оптического изображения на подвижных носителях, так и круговое сканирование окружающего пространства с использованием МФПУ.
Целью предлагаемого изобретения является получение качественных видеокадров с помощью МФПУ как при круговом сканировании, так и при сопровождении высокодинамичных объектов при достаточно больших (десятые доли градуса) погрешностях системы управления приводами устройства.
Сущность изобретения состоит в том, что сформированное оптической системой изображение фиксируется на МФПУ с помощью оптической призмы, компенсирующей угловые погрешности положения визирной оси оптической системы поворотом оптической призмы по двум взаимно перпендикулярным осям, лежащим в плоскости, перпендикулярной оптической оси оптической системы.
Линейное смещение оптического изображения δ1 в направлении, перпендикулярном оптической оси объектива (И.А.Грейм, «Оптические дальномеры и высотомеры геометрического типа», Москва, «Недра», 1983 г., стр.99), вызванное поворотом призмы на угол ε, определяется следующим выражением:

где δ1 - линейное смещение изображения в миллиметрах;
d - толщина призмы в миллиметрах;
ε - угол поворота преломляющей призмы;
n - показатель преломления материала призмы.
Линейное смещение оптического изображения δ2 в направлении, перпендикулярном визирной оси оптической системы, вызванное поворотом оптической системы на угол φ, определяется следующим выражением:

где δ2 - линейное смещение изображения;
f - фокусное расстояние объектива;
φ - угол поворота оптической системы.
Для стабилизации оптического изображения на МФПУ линейное смещение оптического изображения δ2, вызванное поворотом оптической системы, и линейное смещение оптического изображения δ1, вызванное поворотом призмы, должны быть равны друг другу и направлены в противоположные стороны.
Отношение угла поворота призмы ε к углу поворота оптической системы (есть коэффициент оптической редукции «К», который при малых углах ε и φ приближенно равен:

Этот коэффициент показывает: во сколько раз угол поворота призмы должен быть больше угла поворота всей оптической системы для одного и того же линейного смещения оптического изображения в ее фокальной плоскости.
При круговом сканировании окружающего пространства требуется компенсировать скорость бега оптического изображения по МФПУ, вызванного вращением оптической оси с угловой скоростью Ω. Скорость бега можно приближенно компенсировать вращением призмы с угловой скоростью, в «К» раз большей скорости вращения оптической оси. С учетом формулы (3):

где ω - угловая скорость призмы;
Ω - угловая скорость сканирования.
Для большинства практических задач точность компенсации по формуле (4) бывает достаточна. При необходимости получения более высокой точности компенсации скорость призмы должна определяться с учетом формул (1) и (2).
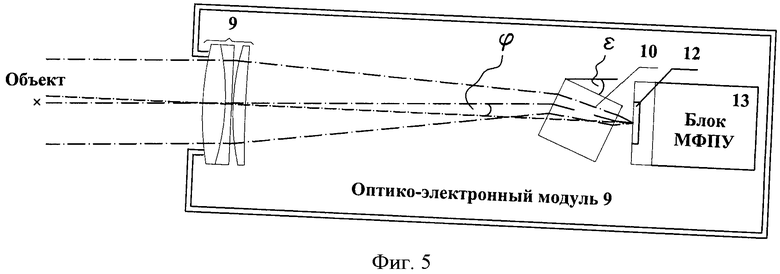
Расчеты показывают, что рабочие углы призмы - углы, при которых изображение фиксируется на МФПУ (фиг.5), не превышают ±15 градусов от нормали к оптической оси оптической системы устройства. При дальнейшем вращении осуществляется переход призмы на новые рабочие углы. Соответственно, поле зрения оптической системы в азимутальной плоскости должно быть пропорционально увеличено. Например, для четырехгранной призмы, угловой период которой равен 90 градусов, рабочие углы составляют примерно 1/3 ее углового периода. Соответственно, должно быть увеличено на 1/3 поле зрения оптической системы в азимутальной плоскости.
Положительный эффект предлагаемого изобретения заключается в следующем.
Во-первых, требования к точности углового позиционирования призмы в несколько раз (в «К» раз) ниже требований к точности углового позиционирования оптической системы, что позволяет существенно снизить требования к системе управления приводами стабилизации.
Во-вторых, масса призмы значительно меньше массы всей оптической системы с МФПУ, облаченной в металлический корпус, а следовательно, значительно меньше инерционные нагрузки и моменты трения, что позволяет повысить динамические параметры системы стабилизации, а также снизить электропотребление.
В-третьих, устройство позволяет осуществлять круговое сканирование с применением МФПУ со временем накопления до 1/3 периода кадровой развертки. Это время более чем в 200 раз превышает стандартное время экспонирования фотоприемной линейкой или МФПУ с подсветкой объектов лазерным излучателем длительностью 64 мкс, что позволяет получать качественное видеоизображение при достаточно низких уровнях освещенности на местности.
В-четвертых, параметры оптической системы (поле зрения, фокусное расстояние и др.) могут выбираться в соответствии с поставленными задачами, например, по дальности обнаружения типовых объектов, с практической возможностью получения панорамного изображения окружающего пространства. При этом габариты устройства остаются в приемлемых границах.
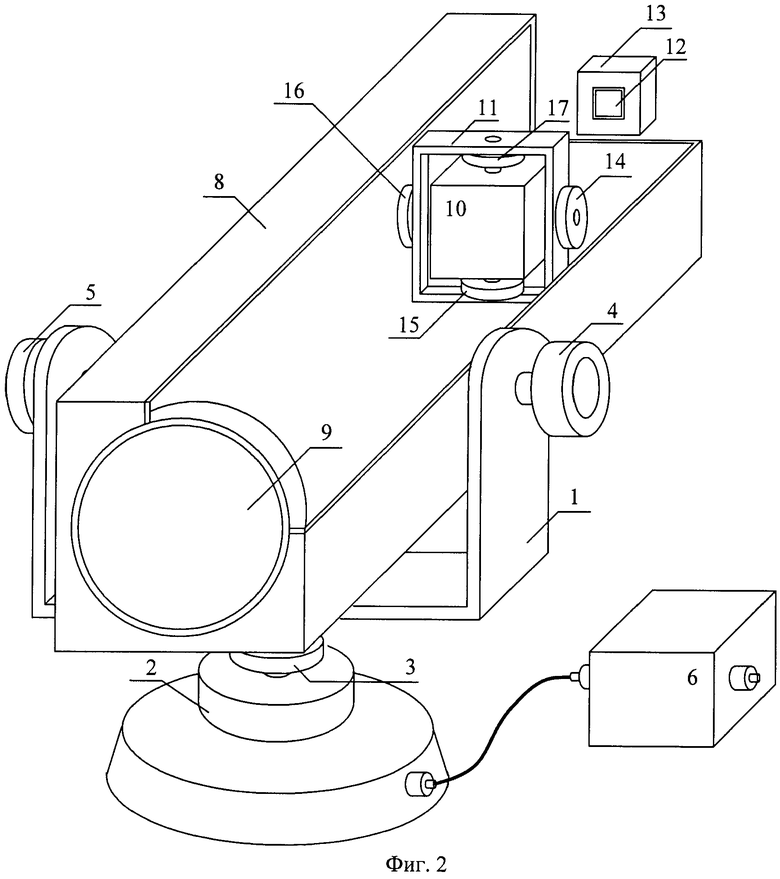
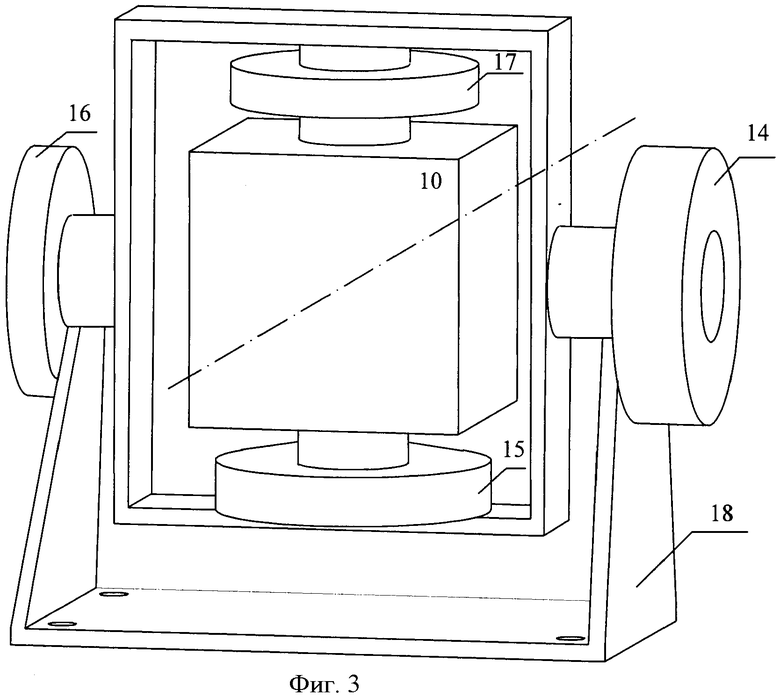
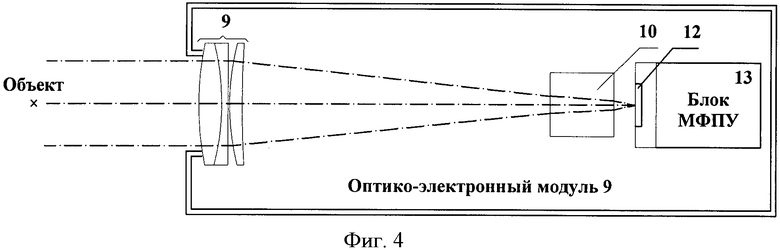
Сущность изобретения поясняется чертежами. На фиг.1 дана структурно-функциональная схема устройства, на фиг.2 схематично изображено устройство сканирования, на фиг.3 представлен оптико-механический блок призмы, на фиг.4 схематично изображена оптическая система устройства при ортогональном положении грани призмы оптической оси, а на фиг.5 - вблизи крайнего рабочего положения.
Устройство сканирования и стабилизации оптического изображения (фиг.1 и фиг.2) содержит сканирующую платформу 1 (СП) с приводом 2 и датчиком угла 3 горизонтальной оси и приводом 4 и датчиком угла 5 вертикальной оси, а также вычислительно-управляющий блок (ВУБ) 6, осуществляющий управление всем устройством. Приводы и датчики через шину последовательного обмена 7 соединены с ВУБ 6.
На сканирующей платформе 1 закреплен оптико-электронный модуль 8 (ОЭМ), который содержит объектив 9, призму 10, установленную в карданов подвес 11, МФПУ 12 с блоком 13, обеспечивающим его работу, формирование видеосигнала и прием сигналов кадровой синхронизации с ВУБ 6. Объектив 9 через оптическую призму 10 формирует оптическое изображение окружающей обстановки на фоточувствительной поверхности МФПУ 12.
Карданов подвес 11 (фиг.3) с установленной на нем оптической призмой 10, содержит приводы внешней 14 и внутренней 15 оси. Каждая ось снабжена датчиком угла 16 и 17 соответственно. Карданов подвес 11 с помощью кронштейна 18 закреплен на корпусе ОЭМ 8. Оси карданова подвеса 11 и грань призмы 10 при нулевых углах карданова подвеса 11 ортогональны оптической оси объектива 9.
Устройства ОЭМ 8 через шину последовательного обмена 7 соединены с ВУБ 6. Внешние устройства (фиг.1) через шину последовательного обмена 7 и ВУБ 6 задают режимы и обеспечивают работу всего устройства сканирования и стабилизации оптического изображения.
Устройство работает в следующих режимах:
- режим стабилизации изображения объекта;
- режим кругового сканирования;
- комбинированный режим.
В режиме стабилизации оптического изображения объекта на шину 7 поступают сигналы рассогласования между направлением на объект и оптической осью ОЭМ 8. Сигналы рассогласования формируются внешними устройствами, например, по видеосигналу с блока МФПУ 13. Эти сигналы грубо отрабатываются приводами горизонтальной 2 и вертикальной 4 осей сканирующей платформы 1. Погрешности грубой стабилизации дорабатываются приводами внешней 14 и внутренней 15 осей карданова подвеса призмы 10. Датчики угла 3 и 5 выдают значение углового положения ОЭМ 8, а датчики угла 16 и 17 с учетом коэффициента «К» (формула 3) выдают угловое положение оптической оси ОЭМ относительно его продольной оси. Эти значения через шину 7 выдаются на внешние устройства для определения местоположения объекта.
В режиме кругового сканирования привод 2 горизонтальной оси СП обеспечивает равномерное круговое вращение с заданной скоростью Ω, а привод 4 вертикальной оси задает угол места сканирования. При этом призма вращается со скоростью ω в соответствии с формулой (4). МФПУ 12 с блоком МФПУ 13 последовательно формируют видеокадры изображения внешней обстановки, которые выдаются на внешние устройства для получения панорамного изображения. Экспонирование участков окружающего пространства осуществляют во время прохождения оптической призмой 10 своих рабочих углов. Диапазон рабочих углов определяется по информации с датчика 17 внутренней оси карданова подвеса 11. По этой информации ВУБ 6 формирует кадровые синхронизирующие импульсы, которые подаются на блок МФПУ 13, обеспечивая экспонирование во время фиксации изображения на фоточувствительной поверхности МФПУ 12.
Комбинированный режим сканирования обеспечивает получение качественного панорамного изображения при колебаниях носителя, например, на морских судах или при движении носителя по пересеченной местности. В этом режиме через шину 7 в вычислительно-управляющий блок 6 с внешних устройств поступает информация об угловых колебаниях носителя. В ВУБ 6 полученная информация и информация с датчиков 3, 5, 16 и 17 обрабатываются, и вычисляются требуемые скорости приводов 2 и 4 сканирующей платформы 1 и приводов 14 и 15 карданова подвеса призмы 11. Приводы 2 и 4 сканирующей платформы 1 и приводы 14 и 15 карданова подвеса призмы 11 отрабатывают заданные скорости, обеспечивая получение электронных кадров стабилизированного панорамного изображения внешней обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2016 |
|
RU2608845C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| СПОСОБ КРУГОВОГО ОБЗОРА МАТРИЧНЫМ ФОТОПРИЕМНЫМ УСТРОЙСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445644C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2011 |
|
RU2457504C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2008 |
|
RU2396574C2 |
Устройство сканирования и стабилизации оптического изображения содержит двухосную сканирующую платформу с установленными на ней объективом, оптической призмой в карданном подвесе с приводами и датчиками угла и матричным фотоприемным устройством и предназначено для получения качественных видеокадров как при слежении за подвижными объектами, так и при круговом сканировании окружающего пространства с постоянной угловой скоростью. Стабилизацию оптического изображения объектов при слежении и фиксацию на матрице оптического изображения окружающего пространства при сканировании и стабилизации обеспечивает оптическая призма, установленная в карданном подвесе перед матричным фотоприемником. Угловая скорость призмы и угловая скорость платформы при сканировании связаны соотношением: ω=f·n·Ω/d·(n-l), где ω - угловая скорость призмы; f - фокусное расстояние объектива; n - показатель преломления материала призмы; Ω - угловая скорость сканирования; d - толщина призмы в миллиметрах. 5 ил.
Устройство сканирования и стабилизации оптического изображения, включающее сканирующую платформу с датчиками угла и приводами вращения по азимуту и углу места, вычислительно-управляющий блок и оптико-электронный модуль, содержащий объектив, в фокальной плоскости которого установлено матричное фотоприемное устройство (МФПУ) с блоком формирования видеосигнала, отличающееся тем, что перед МФПУ введена оптическая призма с четным числом граней, установленная в двухосный карданов подвес с приводом и датчиком угла по каждой оси, которые через шину последовательного обмена подключены к вычислительно-управляющему блоку, причем при нулевых значениях углов карданова подвеса его оси и грань призмы ортогональны оптической оси объектива.
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| RU 20695 U1, 20.11.2001 | |||
| ЕР 713119 А1, 22.05.1996 | |||
| US 5347391 А, 13.09.1994. | |||

