Изобретение относится к области радиосвязи, в частности к системам подвижной связи, и может быть использовано для организации систем подвижной радиосвязи (сотовой связи) с возможностью определения местоположения абонентов, управления в сетях подвижной радиосвязи и предоставлением дополнительных услуг абонентам сетей подвижной радиосвязи, а также сторонним пользователям систем подвижной радиосвязи.
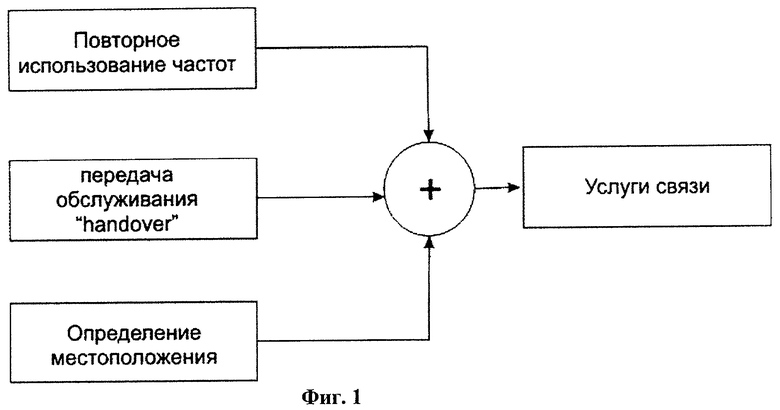
Известны способы построения сетей подвижной связи, в основе которых лежат три принципа: 1) повторное использование частот в сотах; 2) обеспечение непрерывной связи при перемещении подвижного абонента из соты в соту (процедура передачи обслуживания - "handover", а при передачи обслуживания между различными сетями -«roaming»); 3) определение местоположения подвижного абонента в зоне сотовой связи [1]. Схема организации сотовой связи на основе указанных принципов представлена на фиг.1, их совместное использование создает технологическую основу систем сотовой связи для предоставления услуг абонентам.
Известен способ построения системы подвижной радиосвязи стандарта GSM, структура которой представлена на фиг.2 [2].
Сеть состоит из подсистемы базовых станций (BSS), включающей в себя совокупность подвижных станций (MS), базовых станций (BTS) и контроллеров базовых станций (BSC); подсистемы сетевой коммутации (NSS), включающей в себя центр коммутации (MSC) с гостевым регистром местоположения (VLR), связанных с центром аутентификации (AUC), регистром идентификации оборудования (EIR) и домашним регистром местоположения (HLR); подсистемы обеспечения эксплуатации (OSS).
При установлении исходящего соединения подвижная станция совместно с базовой станцией осуществляет формирование радиоканала, далее сеть, используя ресурсы базовых станций, контроллеров базовых станций и центров коммутации, осуществляет соединение между подвижными абонентами сети (сетей) GSM или сетью GSM и сетью PSTN (иными сетями связи).
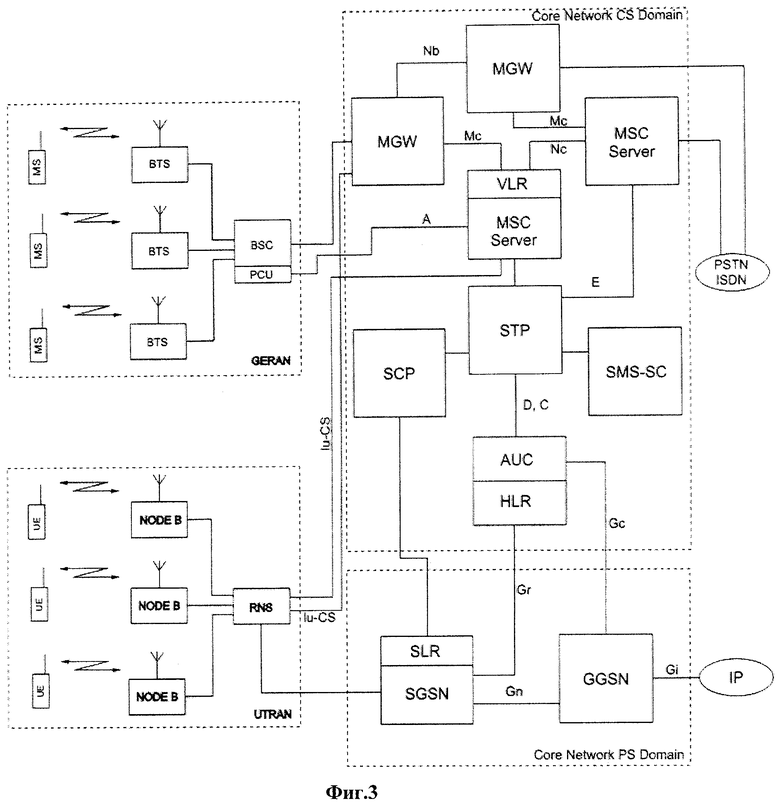
Известен способ построения системы подвижной радиосвязи стандарта UMTS (realise 4), структура которой представлена на фиг.3 [3].
Рассматриваемая модификация сети UMTS позволяет осуществлять совместную работу оборудования сетей GSM и сетей UMTS. Сеть состоит из подсистемы GERAN, позволяющей осуществлять доступ к услугам сети подвижным станциям стандарта GSM, подсистемы UTRAN, позволяющей осуществлять доступ оборудованию абонента (UE) к услугам сети UMTS, и базовой сети, логически разделяемой на домен коммутации каналов (CS - Core Network SC Domain), осуществляющий установление соединения между MS/UE и доступ во внешние сети PSTN / ISDN и домен коммутации пакетов (PS - Core Network PS Domain), осуществляющий предоставление услуг GPRS и доступ во внешние IP сети. При установлении соединения подсистемы GERAN и UTRAN осуществляют формирование радиоканалов и предварительную обработку, фактическое соединение абонентов и предоставление услуг производится базовой сетью.
Известны наиболее распространенные способы определения местоположения в сетях связи GSM/UMTS, выполняемые дополнительным оборудованием сетей связи, например [4].
Способ определения местоположения на основе вычисления времени распространения сигнала по восходящей линии (ТоА), основан на генерации подвижной станцией специального измерительного сигнала, представляющего собой пакеты доступа, генерируемые подвижной станцией при выполнении процедуры асинхронного хендовера, которые принимаются измерительными модулями, установленными на базовых станциях сети подвижной радиосвязи. Центр определения местоположения сети подвижной радиосвязи вычисляет задержку распространения сигналов от подвижной станции не менее чем до трех синхронизированных измерительных модулей, которые могут как интегрироваться в базовые станции, так и устанавливаться отдельно, и, используя зависимость времени распространения сигнала от расстояния, производить определение местоположения.
Способ измерения разности времени приема сигналов (OTDoA), заключается в том, что подвижная станция использует информацию о наблюдаемой разности времени приема сигналов от нескольких базовых станций. При синхронизации подвижной и базовой станции подвижная станция производит измерения относительного времени приема сигналов от различных базовых станций. В случае отсутствия синхронизации сигналы дополнительно принимаются измерительным модулем с известными координатами. Определение местоположения производится путем вычисления геометрической составляющей задержки между временем приема указанных сигналов.
Усовершенствованный способ измерения разности времени приема сигналов (E-OTD), предназначенный для применения в современных сетях связи третьего поколения UMTS, заключается в том, что основной измеряемой величиной является задержка между двумя системными кадрами, получаемая от двух различных базовых станций сети UMTS в общем пилотном канале, используемом для синхронизации оборудования абонента и базовой станции, вспомогательными данными является время полного прохождения сигнала на участке базовая станция - подвижная станция при их несинхронной работе, а в случае их синхронизации используется величина отклонения времени приема, причем синхронизация сети обеспечивается интегрированным радионавигационным приемником, при этом первичные измерения производятся подвижной станцией, а окончательные вычисления осуществляются сетью подвижной радиосвязи.
Способ Cell ID, обеспечивающий идентификацию местоположения подвижной станции с точностью «до соты», основывается на структуре сети подвижной связи и тем самым не требует каких-либо дополнительных вычислительных затрат. Точность способа напрямую зависит от структуры сети и ориентировочно варьируется от нескольких десятков километров в ненаселенных пунктах до десятков-сотен метров в условиях густонаселенного города. Модификация указанного способа - Cell ID - ТА основана на определении величины задержки распространения сигнала от базовой станции до подвижной станции в пределах соты. В результате сеть получает значение величины задержки распространения сигнала и идентификатор базовой станции, что несколько повышает точность определения местоположения подвижной станции.
Известны способы определения местоположения абонента с помощью подвижной станции с использованием сигналов глобальных радионавигационных систем (GPS, GLONASS, GALILEO и др.). В основе способов лежит использование интегрированного в подвижную станцию навигационного приемника. Подвижная станция определяет местоположения абонента без затрат вычислительных функций сети подвижной радиосвязи. В некоторых способах используются вспомогательные данные от референсных приемников радионавигационных систем, расположенных стационарно и распространяющих дифференциальные поправки, получаемые подвижной станцией по альтернативным сетям радиосвязи, например сетям эфирного радиовещания, телевидения и т.п. К подобным способам определения местоположения относятся способ GPS и способ A-GPS (Assisted GPS). В известных способах определения местоположения с использованием сигналов глобальных навигационных систем сеть подвижной радиосвязи используется в качестве транспортной сети для передачи информации о местоположении для осуществления ее дальнейшей обработки.
Известны способы повышения точности определения местоположения [5] существующих радионавигационных систем. На земле, в точках с известными географическими координатами, устанавливаются референсные (опорные) радионавигационные приемники, которые, принимая сигналы от спутников системы, проводят необходимые вычисления и распространяют по различным наземным сетям связи, например сотовым, полученные дифференциальные поправки. Радионавигационные приемники принимают указанную дополнительную информацию в виде дифференциальных поправок и обрабатывают ее совместно с поступающей от спутника радионавигационной информацией, что существенно увеличивает точность определения местоположения.
При определении местоположения с помощью радионавигационных систем имеют место погрешность и неоднозначность определения местоположения, связанные с различными факторами, в частности с особенностями распространения радиоволн в различных диапазонах - дифракцией и интерференцией, а также типом используемых дальномерных кодов. Уменьшение погрешностей и устранение неоднозначности возможно в результате определения местоположения в результате совместного использования данных нескольких различных радионавигационных систем за счет принципиального отсутствия характерных погрешностей (неоднозначности) одной системы в другой системе.
Определение местоположения в сетях связи дает возможность предоставлять операторам сетей связи, например, следующие дополнительные услуги, связанные с определением местоположения: определение местоположения абонента с привязкой его к цифровой карте местности; определение ближайших к абоненту участков инфраструктуры города; предоставление информации о загруженности транспортом дорожной сети; передачу координат пользователя оперативным службам при совершении экстренного вызова; определение местоположения других абонентов; установление индивидуальных и групповых зон тарификации; приоритет доступа к различным услугам сети и т.п.
Основным недостатком способов определения местоположения силами сети подвижной радиосвязи является необходимость использования дополнительного оборудования в виде измерительных модулей, центров определения местоположения, дополнительных каналов связи и вычислительных ресурсов, что увеличивает стоимость оборудования сети и предоставляемых услуг, а также создает дополнительную нагрузку на каналы связи.
В настоящее время, в действующих сетях связи, сигналы радионавигационных систем для управления сетями связи GSM/UMTS, в частности для реализации процедуры передачи обслуживания (handover), не используются.
По технической сущности наиболее близким к предлагаемому изобретению является способ сотовой связи, выбранный в качестве прототипа [6]. Указанный способ сводится к формированию конфигурации сот базовых станций, границами которых является совокупность географических координат, обеспечению процедуры перехода из соты в соту при пересечении указанных границ сот и определению местоположения подвижной станции на основе координат, получаемых от спутниковой системы местоопределения, например GPS. При этом осуществляют передачу от подвижных станций, содержащих приемник спутниковой системы определения местоположения, текущих данных о местоположении подвижных станций через базовые станции системы сотовой связи в центр управления системой сотовой связи, который формирует фрагменты географической карты в электронной (цифровой) форме, включающей координаты границ соты данной базовой станции и сот соседних базовых станций, их рабочих параметров каналов связи (частот, кодов и т.п.), и передает подвижным станциям указанные фрагменты географических карт для запоминания их и последующего сравнения на подвижной станции с текущими данными спутникового определения местоположения с целью определения рабочих параметров каналов связи и обеспечения процедуры перехода подвижной станции из одной соты в другую или из одной сети в другую при роуминге или при смене одного вида радиодоступа или сети связи на другой. Помимо сказанного, данные о местоположении используют для обеспечения необходимой диаграммы направленности антенн базовых станций, определения периодичности определения местоположения и размера пересылаемого фрагмента электронной карты местности. В изобретении обеспечивается совместная работа глобальных радионавигационных систем и систем сотовой связи.
Недостатки известного способа заключаются в том, что определение местоположения по сигналам спутниковых радионавигационных систем затруднено, а в некоторых случаях невозможно, в условиях городской застройки, в подземных сооружениях, зданиях и т.д. в структуру подвижной станции необходимо дополнительно вводить радионавигационный приемник, система сотовой связи неработоспособна в зонах отсутствия сигналов спутниковых радионавигационных систем, в случае отсутствия дополнительно распространяемых сигналов поправок время до получения первого значения координат местоположения подвижной станции составляет несколько минут, сигналы спутниковой радионавигационной системы имеют низкие энергетические характеристики, необходимо формировать и обеспечивать передачу из центра управления фрагментов электронной карты местности для каждой подвижной станции сети подвижной радиосвязи.
Технической задачей данного изобретения является создание способа определения местоположения и управления в сетях подвижной связи, обеспечивающего повышение эффективности системы подвижной радиосвязи за счет снижения нагрузки на оборудование сети подвижной радиосвязи, снижения нагрузки сетевых интерфейсов (линий связи), вовлеченного в выполнение процедуры передачи обслуживания (базовых станций, контроллеров базовых станций, центров коммутаций различных сетей и т.п.), сокращения состава оборудования сети, ответственного за осуществление определения местоположения подвижных станций (например LMU, SMLC, GMLC и др.) для оказания услуг, связанных с определением местоположения подвижных станций, повышение точности определения местоположения подвижных станций относительно существующих способов и снижения объема вычислений, производимых в подвижной станции, уменьшения потребляемой мощности подвижной станции, доступности и высоких энергетических характеристиках сигналов радионавигационного поля в зоне действия сети подвижной радиосвязи, малого времени до получения первоначальных координат местоположения, осуществления точной процедуры роуминга, т.е. передачи обслуживания в другую географическую зону (внутрисетевой роуминг) или на территорию другого государства (международный роуминг) и хендовера (в т.ч. и вертикального) по установленным географическим границам, а также возможности перераспределения освободившихся вычислительных мощностей оборудования и полосы пропускания (кодовых последовательностей) каналов связи для решения других задач, отсутствие необходимости определения сетью размера и периодичности передаваемого в подвижную станцию фрагмента электронной карты местности; возможность коммерческого использования сигналов сформированного радионавигационного поля; предоставление услуг, связанных с определением местоположения с использованием сигналов сформированного радионавигационного поля внешним или внутренним пользователям сети подвижной радиосвязи; исключение отказов в обслуживании при осуществлении процесса передачи обслуживания; возможности оптимизации (перераспределения) нагрузок базовых станций; определение индивидуальной тарификации оказанных услуг и приоритета к их доступу в сети подвижной радиосвязи; минимизация эффекта «пинг-понга»; уменьшение вероятности отказа обслуживания абонента и предоставление ему дополнительного спектра услуг; перенаправление потока информации, необходимой пользователю, в соответствии с изменением его местоположения, уменьшение вероятности отказа обслуживания абонента, снижение вычислительных затрат на обслуживания абонентов, уменьшение вероятности разрыва соединения в процессе передачи обслуживания.
Поставленная задача достигается тем, что в способе определения местоположения в сетях подвижной радиосвязи, характеризующемся тем, что в подвижной станции сети подвижной радиосвязи по радионавигационным сигналам радионавигационного поля определяют местоположение, направление движения и скорость перемещения подвижной станции, согласно изобретению радионавигационное поле формируют на территории зоны покрытия сети подвижной радиосвязи с помощью сигналов базовых станций сети подвижной радиосвязи, при этом в структуру сигналов, формируемых и передаваемых базовыми станциями сети подвижной радиосвязи, вводят радионавигационную информацию.
При этом, сформированное радионавигационное поле может быть использовано для управления сетью подвижной радиосвязи с помощью информации о местоположении подвижной станции, которое заключается в том, что в подвижной станции сети подвижной радиосвязи по сигналам сформированного радионавигационного поля производят сравнение координат границ зоны обслуживания текущей базовой станции и координат текущего местоположения подвижной станции, при пересечении границы зоны обслуживания текущей базовой станции в подвижной станции производят выбор новой базовой станции и затем передают в сеть подвижной радиосвязи информацию о новой выбранной базовой станции, включающую координаты текущего местоположения подвижной станции, скорость и направление движения.
Кроме того, сформированное радионавигационное поле может быть использовано для предоставления услуг определения местоположения внешним, по отношению к сети подвижной радиосвязи, пользователям.
Таким образом, поставленные задачи решаются за счет формирования сетью связи собственного радионавигационного поля с высокими энергетическими характеристиками и использования его для определения координат подвижной станции.
Повышение эффективности системы подвижной радиосвязи обеспечивается за счет снижения нагрузки на оборудование сети подвижной радиосвязи путем исключения необходимости проведения анализа сетью уровня сигнала подвижной станции при выполнении процедуры передачи обслуживания и, как следствие, снижения нагрузки сетевых интерфейсов (линий связи), вовлеченного в выполнение процедуры передачи обслуживания (базовых станций, контроллеров базовых станций, центров коммутаций различных сетей и т.п.), сокращения состава оборудования сети ответственного за осуществление определения местоположения подвижных станций (например LMU, SMLC, GMLC и др.) для оказания услуг, связанных с определением местоположения подвижных станций, повышения точности определения местоположения подвижных станций относительно существующих способов и снижения объема вычислений, производимых в подвижной станции, за счет стационарного размещения базовых станций, а следовательно, и уменьшения потребляемой мощности подвижной станции, доступности и высоких энергетических характеристиках сигналов радионавигационного поля в зоне действия сети подвижной радиосвязи, малого времени до получения первоначальных координат местоположения, минимизации эффекта «пинг-понга» на границах зон обслуживания БС, осуществления точной процедуры роуминга, т.е. передачи обслуживания в другую географическую зону (внутрисетевой роуминг) или на территорию другого государства (международный роуминг) и хендовера (в т.ч. и вертикального) по установленным географическим (пространственным) границам, а также возможности перераспределения освободившихся вычислительных мощностей оборудования и полосы пропускания (кодовых последовательностей) каналов связи для решения других задач, отсутствие необходимости определения сетью размера и периодичности передаваемого в подвижную станцию фрагмента электронной карты местности.
Изобретение поясняется чертежами.
На фиг.1. приведена общая схема организации сети подвижной радиосвязи; на фиг.2 - структура сети подвижной радиосвязи GSM; на фиг.3 - структура сети подвижной радиосвязи UMTS (realise 4); на фиг.4 - структура сети подвижной радиосвязи с использование сигналов сформированного радионавигационного поля; на фиг.5 - гистерезис зон обслуживания базовых станций; на фиг.6 - схема функционирования сети подвижной радиосвязи с использованием сигналов сформированного радионавигационного поля при предоставлении дополнительной услуги высокоточного определения местоположения; на фиг.7 - схема функционирования сети подвижной радиосвязи с использованием сигналов сформированного радионавигационного поля при предоставлении дополнительной услуги высокоточного определения местоположения и управления сетью подвижной радиосвязи.
Предлагаемый способ определения местоположения, а также и управления в сетях подвижной радиосвязи, заключается в следующем.
В зоне действия сети подвижной радиосвязи формируют радионавигационное поле (фиг.4). Для этого в существующие сигналы, передаваемые базовыми станциями системы подвижной радиосвязи, вводят дополнительную радионавигационную информацию, представляющую собой, например, дальномерные коды или другие заранее установленные сигналы. Указанные сигналы, например, могут находиться в таймслотах, формируемых сетью последовательностей, или быть представлены в виде элементарного информационного символа системы и т.д. Подвижная станция, находясь в зоне действия сформированного радионавигационного поля, принимает радионавигационные сигналы необходимого, для обеспечения определения местоположения, количества базовых станций. Базовые станции непрерывно в открытом или зашифрованном виде передают радионавигационную информацию, анализируя которую подвижная станция производит определение своего местоположения, скорости и направления перемещения и другие необходимые характеристики, при этом работа базовой сети подвижной радиосвязи остается неизменной.
Модификацией указанного выше способа является способ определения местоположения и управления в сетях подвижной радиосвязи, заключающийся в том, что в зоне действия сети подвижной радиосвязи формируют радионавигационное поле. Для этого в существующие сигналы, передаваемые базовыми станциями системы подвижной радиосвязи, вводят дополнительную радионавигационную информацию. Подвижная станция, находясь в зоне действия радионавигационного поля, принимает сигналы необходимого для обеспечения определения местоположения количества базовых станций. Базовые станции непрерывно в открытом или зашифрованном виде передают радионавигационную информацию, анализируя которую подвижная станция производит определение своего местоположения, скорости и направления перемещения и другие необходимые характеристики. Также в подвижную станцию доступными для сети подвижной радиосвязи способами передается информация, содержащая электронную карту местности или ее фрагмент с границами зон обслуживания базовых станций и координатами базовых станций, координаты объектов, существенных с точки зрения распространения радиоволн, текущую нагрузку сети, перечень предоставляемых услуг, координаты зон обслуживания близлежащих базовых станций, например координаты микро-, макро- и пикосот, границы зон тарификаций и т.п.
При первоначальной регистрации в сети подвижная станция, по сигналам сформированного радионавигационного поля, определяет свое местоположение и, используя полученную цифровую карту местности или ее фрагмент, обслуживающую базовую станцию, координаты соседних с обслуживающей базовых станций, границы зон обслуживания базовых станций. Подвижная станция сообщает сети свое местоположение, и осуществляется процедура регистрации подвижной станции в сети подвижной радиосвязи.
При перемещении подвижной станции в режиме ожидания подвижная станция по сигналам сформированного радионавигационного поля осуществляет определение своего местоположения, скорости и направления движения, и, при пересечении зоны обслуживания текущей базовой станции, осуществляет выбор и передает в сеть информацию о выбранной новой обслуживающей базовой станции. Далее осуществляется необходимая регистрация подвижной станции в зоне действия новой базовой станции сетью подвижной радиосвязи.
При перемещении подвижной станции в режиме установленного соединения подвижная станция по сигналам сформированного радионавигационного поля осуществляет определение своего местоположения, скорости и направления движения и при пересечении зоны обслуживания текущей базовой станции (процесс передачи обслуживания, т.н. хендовер) осуществляет выбор новой базовой станции, передает в сеть информацию своем местоположении и необходимости коммутации сетью установленного соединения с текущей базовой станции на новую базовую станцию, после чего сеть подвижной радиосвязи осуществляет необходимые переключения. Таким образом, подвижная станция принимает решение о необходимости передачи обслуживания и осуществляет выбор новой обслуживающей базовой станции.
Вычисление скорости перемещения подвижной станции осуществляется, в частности, для адаптации частоты определения местоположения подвижной станции с целью минимизации погрешности пересечения установленной цифровой картой местности границ, а направление перемещения подвижной станции может использоваться для изменения архитектуры или алгоритмов работы сети подвижной радиосвязи с целью снижения вероятности отказа в обслуживании абонентов.
Для исключения эффекта многократной поочередной смены обслуживающей базовой станции, при нахождении на границе зон обслуживания двух или более базовых станций (эффект пинг-понга), подвижная станция рассчитывает (или использует полученный от базовой станции) географический гистерезис зоны обслуживания (фиг.5). Смысл географического гистерезиса заключается в том, что, находясь в зоне действия одной базовой станции, подвижная станция после пересечения границы зоны обслуживания (непрерывная линия) текущей базовой станции производит выбор новой базовой станции, а при возврате из зоны действия новой базовой станции в зону действия предыдущей базовой станции осуществляет выбор новой базовой станции после пересечения некоторой границы зоны обслуживания, не совпадающей с пересеченной ранее зоной обслуживания базовой станции (пунктирная линия).
Сформированное радионавигационное поле на территории сети подвижной радиосвязи может использоваться для определения местоположения не только подвижными станциями сети подвижной радиосвязи, но и внешними, по отношению к сети подвижной радиосвязи, абонентами. Для этого внешние абоненты используют стандартное абонентское оборудование системы подвижной радиосвязи, осуществляющее только анализ сформированного радионавигационного поля для определения местоположения. Для повышения точности определения местоположения данное оборудование может содержать специализированное аппаратное и программное обеспечение. Для исключения возможности несанкционированного определения местоположения внешними абонентами сигналы сформированного радионавигационного поля могут передаваться в закрытом (зашифрованном) виде. В этом случае для доступа внешних и внутренних абонентов к сформированному радионавигационному полю используют криптографические ключи.
Определение местоположения абонентов по сигналам сформированного радионавигационного поля дает возможность установить для некоторой группы абонентов сети или каждого абонента в отдельности некоторую географическую (пространственную) зону тарификации или некоторый географический (пространственный) приоритет обслуживания. Подобный подход позволяет создавать индивидуальные зоны тарификации и рационально использовать ресурсы сети.
Таким образом, в результате введения дополнительной радионавигационной информации в структуру сигнала излучаемой базовыми станциями системы подвижной радиосвязи, вид классической системы сотовой связи, показанной на фиг.1, преобразуется в структуру сети подвижной радиосвязи (фиг.6), где пользователи системы получают дополнительную услугу точного определения местоположения подвижной станцией по сигналам сформированного радионавигационного поля, а функционирование сети подвижной радиосвязи остается неизменным, и в дальнейшем - в структуру сети подвижной радиосвязи (фиг.7), где определение местоположения производится подвижной станцией по сигналам сформированного радионавигационного поля, с предоставлением пользователям услуг точного определения местоположения, при этом подвижная станция участвует в процессе управления сетью подвижной радиосвязи, в частности принимает решение о выборе новой обслуживающей базовой станции при реализации процедуры передачи обслуживания (handover), снижая вычислительную нагрузку сети.
Техническим результатом предлагаемого изобретения является повышение эффективности системы подвижной радиосвязи за счет предоставления новой услуги точного определения местоположения, снижения нагрузки на оборудование сети подвижной радиосвязи путем исключения необходимости проведения анализа сетью уровня сигнала подвижной станции при выполнении процедуры передачи обслуживания и, как следствие, снижения нагрузки сетевых интерфейсов (линий связи) и оборудования, вовлеченного в выполнение процедуры передачи обслуживания (базовых станций, контроллеров базовых станций, центров коммутаций различных сетей и т.п.), сокращения состава оборудования сети, ответственного за осуществление определения местоположения подвижных станций (например, LMU, SMLC, GMLC и др.) для оказания услуг, связанных с определением местоположения подвижных станций, повышение точности определения местоположения относительно существующих способов и снижение объема вычислений, производимых в подвижной станции, за счет стационарного размещения базовых станций, формирующих радионавигационные сигналы, а следовательно, уменьшение потребляемой мощности подвижной станции, доступности и высоких энергетических характеристиках сигналов сформированного радионавигационного поля в зоне действия сети подвижной радиосвязи, малого времени до получения первоначальных координат местоположения, минимизации эффекта «пинг-понга» на границах зон обслуживания базовых станций, осуществления точной процедуры роуминга, т.е. передачи обслуживания в другую географическую зону (внутрисетевой роуминг) или на территорию другого государства (международный роуминг) и хендовера (в т.ч. и вертикального) по установленным географическим (пространственным) границам, а также возможности перераспределения освободившихся вычислительных мощностей оборудования и полосы пропускания (кодовых последовательностей) каналов связи для решения других задач.
Дополнительным техническим результатом является: возможность осуществления процедуры вертикальной передачи обслуживания, организации сот или зон обслуживания (тарификации) произвольной конфигурации, в том числе и для некоторой группы абонентов, предоставления дополнительных услуг как абонентам сети подвижной радиосвязи, так и внешним пользователям, например доступа к сформированному радионавигационному полю внешним пользователям с целью определения своего местоположения, использование данных о местоположении подвижной станции для управления антенными системами с изменяемой диаграммой направленности базовых станций.
Таким образом, сущность изобретения заключается в формировании на территории зоны покрытия системы подвижной радиосвязи, с помощью радионавигационной информации, вводимой в сигнал, излучаемый базовыми станциями, радионавигационного поля, формировании конфигурации зон обслуживания базовых станций с границами, представленными географическими (пространственными) координатами, передаче в подвижную станцию сетью подвижной радиосвязи границ зон обслуживания базовых станций, координат местоположения базовых станций и других значимых объектов совместно с другой дополнительной информацией, например о границах зон различных тарификаций. Подвижная станция по сигналам сформированного радионавигационного поля определяет свое местоположение и направление движения, передает полученные координаты и направление движения в сеть подвижной радиосвязи, при пересечении границ зон обслуживания и/или в других случаях (например, низкий уровень сигнала базовой станции) производит выбор оптимальной обслуживающей базовой станции при необходимости осуществления процедуры роуминга и/или хендовера (в т.ч. и вертикального) или при нахождении в режиме ожидания.
Кроме того, подвижная станция использует сигналы сформированного радионавигационного поля для определения скорости своего перемещения, в частности для определения периодичности вычисления координат своего местоположения. Кроме того, данные о местоположении подвижной станции и сигналы сформированного радионавигационного поля используются для уменьшения эффекта «пинг-понга», управления диаграммой направленности антенн базовых станций с целью увеличения дальности связи и снижения уровня помех, повышения качества связи, емкости сети, оказания абонентам и внешним пользователям дополнительных услуг, связанных с точным определением местоположения.
Первоначальная загрузка информации, необходимой для работоспособности системы, в подвижные станции абонентов (электронная карта местности, границы зоны обслуживания базовых станций, текущая степень загрузки базовых станций и т.д.) может осуществляться посредством системы GPRS/EDGE или иными доступными для системы подвижной радиосвязи способами (используя предварительно загружаемое в подвижную станцию специализированное программное обеспечение, сеть Интернет или другие сети связи).
Источники информации
1. Asha Mehrotra. Cellular Radio. Analog and Digital Systems. Artech House, Inc. 1994, 460 p.
2. Попов В.И. Основы сотовой связи стандарта GSM. Экотрендз, Москва, 2005, стр.17.
3. R.Kreher, J.Placht, T.Ruedebusch. UMTS UTRAN Signaling. Network Diagnostics, Academy Tektronix, 2003, p.19.
4. Ю.А.Громаков, А.В.Северин, В.А.Шевцов. Технологии определения местоположения в GSM и UMTS. Экотрендз, Москва, 2005 г., стр.39.
5. К.Одуан, Б.Гино. Измерение времни. Основы GPS (с дополнениями М.Б.Кауфмана), Техносфера, Москва, 2002, стр.365.
6. Патент RU №2227373 Ю.А.Громаков, В.А.Шевцов (прототип).




Изобретение относится к области радиотехники, в частности к системам подвижной связи, и может быть использовано для организации систем подвижной радиосвязи с возможностью определения местоположения абонентов, управления в сетях подвижной радиосвязи и предоставлением дополнительных услуг абонентам сетей подвижной радиосвязи, а также сторонним пользователям систем подвижной радиосвязи. Технический результат заключается в снижении нагрузки на оборудование сети и сетевые интерфейсы, в повышении точности и уменьшении времени для определения местоположения, уменьшении потребляемой подвижной станцией мощности, в исключении отказов в обслуживании при передаче обслуживания, а также в уменьшении вероятности отказа обслуживания абонента в целом. Для этого в подвижной станции сети подвижной радиосвязи по радионавигационным сигналам радионавигационного поля определяют местоположение, направление движения и скорость перемещения подвижной станции, при этом радионавигационное поле формируют на территории зоны покрытия сети подвижной радиосвязи с помощью сигналов базовых станций сети подвижной радиосвязи, и в структуру сигналов, формируемых и передаваемых базовыми станциями сети подвижной радиосвязи, вводят радионавигационную информацию. 2 з.п. ф-лы, 7 ил.
1. Способ определения местоположения в сетях подвижной радиосвязи, характеризующийся тем, что в подвижной станции сети подвижной радиосвязи по радионавигационным сигналам радионавигационного поля определяют местоположение, направление движения и скорость перемещения подвижной станции, отличающийся тем, что радионавигационное поле формируют на территории зоны покрытия сети подвижной радиосвязи с помощью сигналов базовых станций сети подвижной радиосвязи, при этом в структуру сигналов, формируемых и передаваемых базовыми станциями сети подвижной радиосвязи, вводят радионавигационную информацию.
2. Способ по п.1, отличающийся тем, что сформированное радионавигационное поле используют для управления сетью подвижной радиосвязи с помощью информации о местоположении подвижной станции, которое заключается в том, что в подвижной станции сети подвижной радиосвязи по сигналам сформированного радионавигационного поля производят сравнение координат границ зоны обслуживания текущей базовой станции и координат текущего местоположения подвижной станции, при пересечении границы зоны обслуживания текущей базовой станции в подвижной станции производят выбор новой базовой станции и затем передают в сеть подвижной радиосвязи информацию о новой выбранной базовой станции, включающую координаты текущего местоположения подвижной станции, скорость и направление движения.
3. Способ по п.1 или 2, отличающийся тем, что сформированное радионавигационное поле используют для предоставления услуг определения местоположения внешним по отношению к сети подвижной радиосвязи пользователям.
| СПОСОБ СОТОВОЙ СВЯЗИ | 2003 |
|
RU2227373C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФОВОЙ ПОДВИЖНОСТИ ПОЛУПРОВОДНИКОВ | 2002 |
|
RU2239913C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ В СИСТЕМЕ ЭЛЕКТРОСВЯЗИ | 2000 |
|
RU2263412C2 |
| СПОСОБ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ ОБ УПРАВЛЕНИИ МОБИЛЬНОСТЬЮ ВО ВРЕМЯ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ В СОТОВОЙ СИСТЕМЕ СВЯЗИ | 2007 |
|
RU2403685C1 |
| RU 2007141297 A, 20.05.2009 | |||
| WO 2010079138 A1, 15.07.2010 | |||
| ШАРОШЕЧНЫЙ РАСШИРИТЕЛЬ | 1996 |
|
RU2112858C1 |

