Изобретение относится к области управления параметрами и механическими характеристиками электродвигателей переменного тока и может быть использовано в электрическом транспорте и промышленности.
Известны способ управления параметрами 3-фазного электродвигателя переменного тока частотно-регулируемого электропривода и устройство для осуществления способа, описанные в книге Клевцова А.В. Средства оптимизации потребления электроэнергии. - Москва, издательство Солон-Пресс, 2004, с.46-66, рис.3.14.
Способ заключается в том, что с блока коммутатора переменное напряжение подают одновременно на два выпрямителя переменного тока в постоянный, один из которых силовой, другой слаботочный. В силовом выпрямляют и постоянный ток подают в блок фильтров для снижения пульсаций постоянного тока, а с выхода блока фильтров постоянный ток поступает как на коллекторы силовых транзисторов автономного инвертора напряжения (АИН), так и систему контроля и измерения напряжения источника питания постоянного тока. В слаботочном - выпрямляют, фильтруют для снижения пульсаций постоянного тока и постоянный ток подают для питания схем блока управления.
В блоке управления на вход сигнального процессора подают сигнал управления процессором, процессор формирует управляющие трехфазные сигналы с заданными параметрами: формой, частотой токов и напряжением источников питания электродвигателя, потокосцеплениями ротора и статора, скоростью вращения ротора электродвигателя, его моментом, для автономного инвертора напряжения - по закону широтно-импульсной модуляции, с выхода процессора сигналы поступают на входы силовых транзисторов АИН. Управляющие трехфазные сигналы в процессе формирования могут быть как синусоидальной, так и трапецеидальной формы, которые обеспечивают кратковременный повышенный момент во время пуска из-за форсированного, насыщенного током, режима работы силовых транзисторов АИН. С выхода АИН трехфазное напряжение поступает на статорные обмотки электродвигателя переменного тока. Выходные сигналы АИН, векторы фазных напряжений и их частоты измеряют, измеряют скорость вращения ротора электродвигателя, измеренные величины подают на вход сигнального процессора, где вычисляют момент. В процессоре измеренные, вычисленные параметры сравниваются с заданными и формируется сигнал корректировки управляющих трехфазных сигналов, которые поступают на вход АИН.
Устройство, осуществляющее этот способ, включает силовой коммутационный блок, содержащий два выпрямителя переменного тока в постоянный с сетевыми фильтрами для снижения пульсаций постоянного тока. Первый, силовой выпрямитель, соединен с m-фазным мостовым транзисторным автономным инвертором напряжения и питает постоянным током силовые транзисторы АИН. Второй, слаботочный выпрямитель, соединен с блоком автоматического управления режимами работы силового электродвигателя и питает постоянным током блок управления. Блок управления, предназначенный для формирования управляющих трехфазных сигналов, вычисления и измерения рабочих параметров силового электродвигателя и выработки корректирующих параметров, соединен с m-фазным мостовым транзисторным автономным инвертором напряжения и измерителем скорости вращения ротора силового электродвигателя, что обеспечивает передачу данных на m-фазный мостовой транзисторный автономный инвертор напряжения, прием рабочих параметров электродвигателя, формирование сигналов коррекции и передачу их в блок инвертора, к которому непосредственно подключен силовой электродвигатель, статорные обмотки которого соединены с выходами трехфазных источников питания, к которым подсоединены также измерители векторов тока и напряжения фаз, контроля форм и частоты выходных сигналов m-фазного мостового транзисторного автономного инвертора напряжения.
Недостатками способа и устройства являются значительные энергетические потери в частотно-регулируемом электроприводе, связанные с формированием трехфазного источника питания по широтно-импульсной модуляции, возникновение очень коротких импульсов в выходном сигнале m-фазного мостового транзисторного автономного инвертора напряжения при переключении транзисторов АИН с частотами до 20-25 кГц, что отрицательно влияет на состояние межвитковой изоляции электродвигателей, а также приводит к повышенным потерям энергии в самих транзисторах. Кроме того, практически невозможно подключить к частотно-регулируемому электроприводу электродвигателей с количеством фаз более 3, имеющих повышенный момент.
Наиболее близким к заявляемому изобретению является способ управления моментом электродвигателей переменного тока формированием в электроприводе частотно-регулируемого сигнала и устройство, реализующее этот способ, по патенту РФ №2326775, МПК B60L 15/20, H02P 7/00, 20.11.2007.
Согласно известному способу задают требуемые параметры, измеряют истинные величины параметров, сравнивают заданные величины с измеренными, вычитают из заданных измеренные значения и регулируют соответствующий параметр по разности величин, при этом составляют программу режимов всего цикла работы силового электродвигателя, вводят в блок сравнения задаваемые и непрерывно измеряемые величины скорости вращения ротора генератора, тока возбуждения генератора, момента силового электродвигателя, по разности величин устанавливают режим работы силового электродвигателя с помощью блока автоматического управления режимами работы силового двигателя, разность параметров, преобразованную в цифровой код в блоке, формирующем сигналы режимов работы силового электродвигателя, подают через блок регулятора тока возбуждения генератора на обмотку возбуждения генератора и через блок регулятора уровня напряжения приводного электродвигателя на вход приводного электродвигателя, с помощью генератора с независимым управлением частоты и амплитуды выходных сигналов генерируют многофазный синусоидальный сигнал, осуществляют контроль и управление синусоидальностью, частотой и амплитудой сигнала, который через коммутатор фаз подают на вход m-фазного мостового транзисторного автономного инвертора напряжения, усиленный силовыми транзисторами АИН многофазный синусоидальный сигнал с выходов силовых транзисторов подают на обмотки статора силового электродвигателя.
Устройство, реализующее этот способ, содержит последовательно соединенные силовой коммутационный блок, включающий силовой выпрямитель, сетевой фильтр и блок защитных цепей и датчиков напряжения и тока; m-фазный мостовой транзисторный автономный инвертор напряжения, силовой асинхронный электродвигатель, при этом выход блока защитных цепей и датчиков напряжения и тока соединен с последовательно соединенными блоком датчиков измеряемых и контролируемых параметров, блоком измерения рабочих параметров, блоком сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, к которому подключен блок задаваемых параметров, блоком автоматического управления режимами работы силового электродвигателя. Известное устройство дополнительно содержит блок ручного управления режимами работы силового электродвигателя, генератор многофазного синусоидального сигнала с приводным электродвигателем, регулятор уровня напряжения приводного электродвигателя, регулятор тока возбуждения генератора, коммутатор фаз, блок переключения количества рабочих фаз генератора, блок формирования сигналов всех режимов работы силового электродвигателя, при этом блок ручного управления режимами работы силового электродвигателя соединен с блоком задаваемых параметров и с блоком автоматического управления режимами работы силового электродвигателя, выход которого подключен к первому входу блока формирования сигналов всех режимов работы силового электродвигателя, второй вход которого подключен ко второму выходу блока ручного управления режимами работы силового электродвигателя, при этом первый выход блока формирования сигналов всех режимов работы силового электродвигателя соединен с входом регулятора тока возбуждения генератора, выход которого соединен с входом генератора, вал ротора генератора жестко связан с валом ротора приводного электродвигателя, вход которого соединен с выходом регулятора уровня напряжения приводного электродвигателя, вход которого подключен ко второму выходу блока формирования всех режимов работы силового электродвигателя, при этом выход генератора соединен с первым входом коммутатора фаз, второй вход которого соединен с выходом блока переключения количества рабочих фаз генератора, который входом соединен с третьим выходом блока ручного управления режимами работы силового электродвигателя, при этом выход блока коммутатора фаз соединен со вторым входом, m-фазного мостового транзисторного автономного инвертора напряжения, выход которого подключен к m-фазной статорной обмотке силового электродвигателя, с выхода которого снимаются данные о скорости при помощи датчика, который соединен со вторым входом блока датчиков измеряемых и контролируемых параметров.
Недостатками способа и устройства являются отсутствие возможности дальнейшего повышения момента на валу силового электродвигателя и дальнейшей экономии электрической энергии, т.е. невозможность достижения режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии из-за неэффективного использования самого многофазного сигнала, ибо выбор его параметров осуществляется без оценки возможности достижения его потенциальной энергетической эффективности.
Невозможность достижения режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии обусловлена произвольным определением количества фаз в блоке задаваемых параметров, в блоке ручного управления режимами работы силового электродвигателя, генераторе многофазного синусоидального сигнала, коммутаторе фаз, m-фазном мостовом транзисторном автономном инверторе напряжения, силовом асинхронном электродвигателе с m-фазной статорной обмоткой.
Задачей изобретения является повышение момента на валу силового электродвигателя и экономия электрической энергии, повышение качества формируемого сигнала за счет обеспечения режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии в стандартных габаритах традиционных асинхронных электрических двигателей с короткозамкнутым ротором повышенной мощности.
Для получения такого технического результата в предлагаемом способе управления моментом электродвигателей переменного тока формированием в электроприводе частотно-регулируемого сигнала задают требуемые параметры в блоке задаваемых параметров, измеряют истинные величины параметров, сравнивают заданные величины с измеренными, вычитают из заданных измеренные значения и регулируют соответствующий параметр по разности величин, при этом составляют программу режимов всего цикла работы силового электродвигателя, требуемые и непрерывно измеряемые величины скорости вращения ротора генератора, тока возбуждения генератора, момента электродвигателя вводят в блок сравнения, по разности величин устанавливают режим работы силового электродвигателя с помощью блока автоматического управления режимами работы силового электродвигателя, разность параметров, преобразованную в цифровой код в блоке, формирующем сигналы режимов работы силового электродвигателя, подают через блок регулятора тока возбуждения генератора на обмотку возбуждения генератора многофазного синусоидального сигнала и через блок регулятора уровня напряжения приводного электродвигателя на вход приводного электродвигателя.
В отличие от известного в предлагаемом способе при составлении программы режимов дополнительно задают два новых режима работы силового электродвигателя: первый режим максимального момента силового электродвигателя, соответствующий 16 группам фаз по 6 фаз в каждой группе, и второй режим максимальной экономии электрической энергии, соответствующий 8 группам фаз по 6 фаз в каждой группе, а в качестве блока задаваемых параметров, блока ручного управления режимами работы силового электродвигателя, генератора многофазного сигнала, коммутатора фаз, m-фазного мостового транзисторного автономного инвертора напряжения, силового электродвигателя используют соответственно блок задаваемых параметров и учета групп с нерабочими фазами, блок ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, генератор полифазного синусоидального сигнала, в котором обмотки фаз генератора скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие первый режим максимального момента силового электродвигателя, причем из них 8 групп по 6 фаз в каждой группе составляют второй режим максимальной экономии электроэнергии, автоматический коммутатор фаз, 96-фазный мостовой транзисторный автономный инвертор напряжения, силовой электродвигатель с 96-фазными статорными обмотками, которые скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие первый режим максимального момента силового электродвигателя, причем из них 8 групп, по 6 фаз в каждой группе составляют второй режим максимальной экономии электроэнергии, при этом для автоматического управления группой рабочих фаз используют блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, для раздельной передачи сигналов двух новых режимов используют блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, для оценки количества нерабочих фаз и вычисления группы с нерабочими фазами используют соответственно блок оценки количества нерабочих фаз и блок вычисления группы с нерабочими фазами, причем два новых режима работы силового электродвигателя вводят в блок сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, в блок автоматического управления режимами работы силового электродвигателя, а также в блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, с выхода которого сигнал о первом и втором режиме подают в блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, с помощью которого выбирают или первый режим максимального момента силового электродвигателя, или второй режим максимальной экономии электрической энергии и подают сигнал выбранного режима в автоматический коммутатор фаз, с помощью генератора с независимым управлением частоты и амплитуды выходных сигналов генерируют полифазный синусоидальный сигнал, который через автоматический коммутатор фаз подают на вход 96-фазного мостового транзисторного автономного инвертора напряжения, с первого и второго выходов которого полифазный синусоидальный сигнал подают соответственно на 96-фазные статорные обмотки силового электродвигателя и в блок оценки количества нерабочих фаз, блок вычисления группы с нерабочими фазами, при помощи которых определяют количество нерабочих фаз и подают сигнал о группе нерабочих фаз одновременно на входы блока задаваемых параметров и учета групп с нерабочими фазами и блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, где эти сигналы учитывают при формировании групп рабочих фаз первого режима максимального момента силового электродвигателя и второго режима максимальной экономии электрической энергии.
Для достижения названного технического результата предлагается устройство для осуществления способа, которое, как и прототип, содержит силовой коммутационный блок, включающий последовательно соединенные силовой выпрямитель, сетевой фильтр, блок защитных цепей и датчиков напряжения и тока, m-фазный мостовой транзисторный автономный инвертор напряжения, силовой асинхронный электродвигатель с m-фазной статорной обмоткой, при этом выход блока защитных цепей и датчиков напряжения и тока соединен с последовательно соединенными блоком датчиков измеряемых и контролируемых параметров, блоком измерения рабочих параметров, блоком сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, к второму входу которого подключен первый выход блока задаваемых параметров, блоком автоматического управления режимами работы силового электродвигателя, блоком формирования сигналов всех режимов работы силового электродвигателя, блок ручного управления режимами работы силового электродвигателя, генератор многофазного синусоидального сигнала с приводным электродвигателем, регулятор уровня напряжения приводного электродвигателя, регулятор тока возбуждения генератора, коммутатор фаз, при этом первый вход блока ручного управления режимами работы силового электродвигателя соединен с вторым выходом блока задаваемых параметров, а первый, второй выходы блока ручного управления соединены соответственно с вторым входом блока автоматического управления режимами работы силового электродвигателя, вторым входом блока формирования сигналов всех режимов работы силового электродвигателя, при этом первый выход блока формирования сигналов всех режимов работы силового электродвигателя соединен с входом регулятора тока возбуждения генератора, выход которого соединен с входом генератора многофазного синусоидального сигнала, вал ротора генератора жестко связан с валом ротора приводного электродвигателя, вход которого соединен с выходом регулятора уровня напряжения приводного электродвигателя, вход которого подключен ко второму выходу блока формирования сигналов всех режимов работы силового электродвигателя, при этом выход генератора соединен с первым входом коммутатора фаз, выход которого соединен со вторым входом m-фазного мостового транзисторного автономного инвертора напряжения, выход которого подключен к m-фазной статорной обмотке силового электродвигателя, с выхода которого снимаются данные о скорости при помощи датчика, который соединен со вторым входом блока датчиков измеряемых и контролируемых параметров.
В отличие от известного в предлагаемое устройство дополнительно введены блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, блок оценки количества нерабочих фаз, блок вычисления группы с нерабочими фазами, при этом генератор многофазного синусоидального сигнала выполнен в виде генератора полифазного синусоидального сигнала, причем обмотки фаз генератора скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие режим максимального момента силового электродвигателя, из них 8 групп по 6 фаз в каждой группе составляют режим максимальной экономии электроэнергии, а m-фазные статорные обмотки силового электродвигателя, m-фазный мостовой транзисторный автономный инвертор напряжения, блок задаваемых параметров, блок ручного управления режимами работы силового электродвигателя, коммутатор фаз выполнены соответственно в виде 96-фазных статорных обмоток, которые скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие режим максимального момента силового электродвигателя, из них 8 групп по 6 фаз в каждой группе составляют режим максимальной экономии электроэнергии, 96-фазного мостового транзисторного автономного инвертора напряжения, блока задаваемых параметров и учета групп с нерабочими фазами, блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, автоматического коммутатора фаз, при этом блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии подключен к третьему выходу блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, блок оценки количества нерабочих фаз подключен к второму выходу 96-фазного мостового транзисторного автономного инвертора напряжения и соединен с входом блока вычисления группы с нерабочими фазами, выход которого одновременно подключен и к входу блока задаваемых параметров и учета групп с нерабочими фазами, и к второму входу блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, а первый и второй выходы блока автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии подключены соответственно к первому и второму входам блока раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, выход которого подключен к второму входу автоматического коммутатора фаз.
Возможность достижения указанного технического результата докажем возможностью создания вектора действующей по кругу вращающей силы полифазной системы, обеспечивающей увеличение силы в два раза по сравнению с трехфазной системой.
Априори известно, что самая эффективная вращающая сила электродвигателя та, которая направлена по кругу. Какое же количество фаз потребуется для создания вращающей силы, действующей по кругу? Для решения этой задачи обратимся к результатам исследования Архимеда, который, желая уточнить оценку π, определил необходимое количество равнобедренных треугольников, состыкованных друг с другом таким образом, чтобы описанная вокруг них кривая (или вписанная в них) не отличались от длины окружности на заданную величину.
Таким числом оказалось 96 треугольников, а кривая, описанная или вписанная, не отличалась от длины окружности примерно на 0,0083%.
Если теперь представить ротор электрической машины, на которой равномерно по его окружности действует 96 сил в одном направлении, то эту суммарную силу можно рассматривать не в виде касательных, а как круговую с погрешностью порядка сотых долей процента, сложенных арифметически.
Количество фаз, равное 96 (m=96), обеспечивает оптимальный выбор численного значения тока фазы и его напряжения. Потребляемую мощность электродвигателя можно определить по формуле  где Uф - напряжение фазы, Iф - ток фазы, η - КПД, cos φ - коэффициент мощности. Оперируя значением числа m фаз, можно подобрать оптимальное значение Iф или Uф. При большом m возможно значительное снижение Iф при P=const, инверторы при этом строятся компактными на микросхемных транзисторах. Как следствие малого Iф, снижаются также электрические потери в фазе
где Uф - напряжение фазы, Iф - ток фазы, η - КПД, cos φ - коэффициент мощности. Оперируя значением числа m фаз, можно подобрать оптимальное значение Iф или Uф. При большом m возможно значительное снижение Iф при P=const, инверторы при этом строятся компактными на микросхемных транзисторах. Как следствие малого Iф, снижаются также электрические потери в фазе  , улучшаются условия охлаждения. Повышается эксплуатационная надежность электрической машины, т.к. вероятность выхода Δmдоп десятков фаз из строя является событием маловероятным.
, улучшаются условия охлаждения. Повышается эксплуатационная надежность электрической машины, т.к. вероятность выхода Δmдоп десятков фаз из строя является событием маловероятным.
Определим теоретически достижимое значение магнитной индукции и вращающей силы ротора в 96-фазной электрической машине (m=96).
На основании закона полного тока полный ток контура равен
где He, Be - проекция векторов напряженности поля H и индукции B на направление обхода контура dl. Предполагается, что направления векторов H и B совпадают. Магнитная система асинхронной машины практически симметрична в продольной d и поперечной q направлениях.
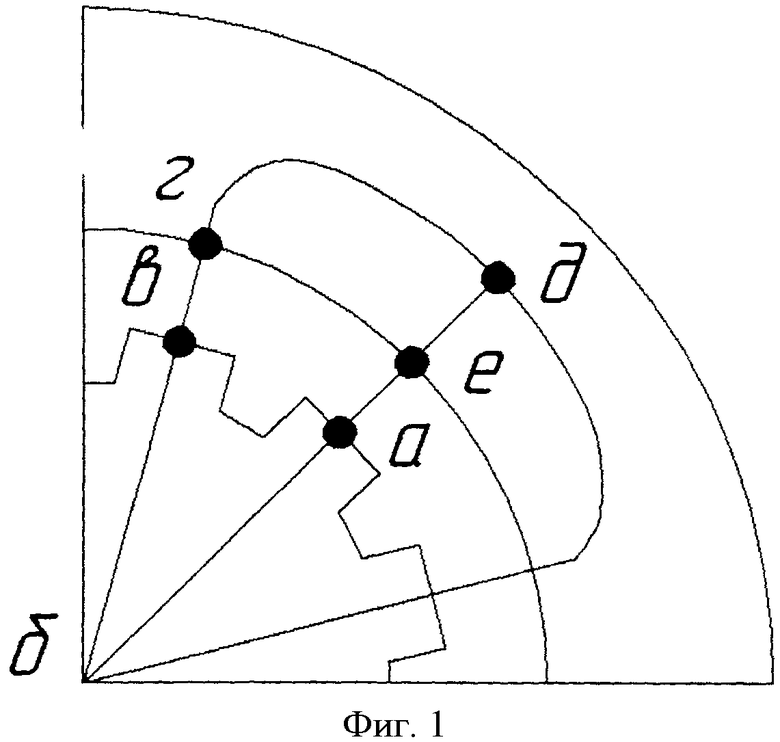
Для контура а, б, в, г, д, е (фиг.1) закон МДС на основании (1) равен

где  - МДС в зазоре,
- МДС в зазоре,
 - МДС участка стали.
- МДС участка стали.
Величина f в (2) называется МДС обмотки. Индукцию Bδ можно предположить неизменной вследствие малости δ. Тогда МДС равна
где δт - длина трубки в воздушном зазоре.
Исходя из практических условий можно принять µc=∞, тогда
Fc=0 и Fδ=f. (4)
При наличии пазов, равномерно распределенных на поверхности статора и ротора, при определении Bср можно принять
δт=δ', (5)
где δ'=kδ·δ - расчетный зазор в kδ раз больше действительного;
kδ - коэффициент воздушного зазора, учитывающий среднее увеличение трубки в зазоре вследствие наличия пазов.
В соответствии с указанными выше формулами индукция Bδ равна
Максимальное значения v-й, составляющей спектра МДС фазной обмотки представлено в виде, указанном в [А.И.Важнов. Электрические машины. «Энергия», Ленинградское отделение, 1969]:
где Kфvm=Kpv*Kyv, a Kyv - коэффициент, учитывающий укорочение обмотки [А.И.Важнов. Электрические машины, «Энергия», Ленинградское отделение, 1969, стр.85].
Конечная формула МДС фазы записывается как

где sin ωt определяет синусоидальное распределение магнитного поля в зазоре машины. МДС основной гармоники одной фазы m-фазной системы в соответствии с приведенными значениями (7) и (8) запишется функцией
а для m фаз, т.е. для одной электрической машины

где p - число пар полюсов принимается равным 1, p=1.
В функции cos X аргумент Х принято отсчитывать от магнитной оси фазы, например, в 3-фазной системе фазные обмотки сдвинуты в магнитном поле возбуждения на величины  где m - число фаз статорной обмотки.
где m - число фаз статорной обмотки.
Для 96-фазной системы  . Их магнитные оси сдвинуты на такой же угол. Из приведенных формул можно сделать вывод, что увеличение количества фаз приводит к увеличению модуля результирующего вектора МДС при той же величине МДС одной фазы.
. Их магнитные оси сдвинуты на такой же угол. Из приведенных формул можно сделать вывод, что увеличение количества фаз приводит к увеличению модуля результирующего вектора МДС при той же величине МДС одной фазы.
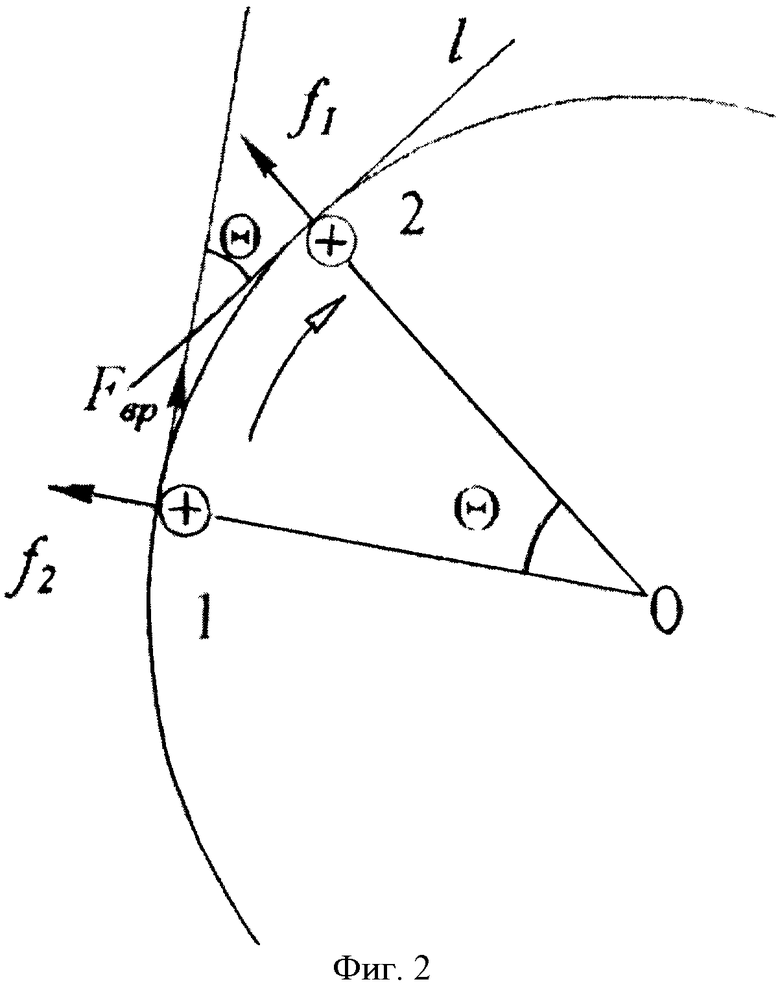
Вращающий вектор МДС Fвр обусловливает появление тока в роторной обмотке и возникновение электромагнитных сил, действующих на ротор. Проведем оценку эффективности распределения этих сил на направление вращения. Условно примем, что сила стремится сместить каждый проводник в точку приложения следующей силы (см. фиг.2).
Угол сдвига фаз θ характеризирует пространственное расположение соответственно МДС f1 и f2, a 1 - касательная к точке 2 окружности ротора, в которую смещается проводник из точки 1. Просуммировав проекции Fврi mфаз, оценим их эффективность как отношение к алгебраической сумме Fвpi.
В частности,
для 96-фазной обмотки получим эффективность

для 48-фазной обмотки получим Эm=48=0,99,
для 3-фазной обмотки получим
Таким образом, доказано, что эффективность 96-фазной машины в 2 раза выше, чем в 3-фазной машине, а управлять моментом будет возможно при количестве фаз от mмакс, равным 96, до mмин, равным 48. Обусловлен этот выигрыш выбором рационального (оптимального) количества фазных обмоток статора, а также равномерным распределением по периметру обмоток фаз статора и ротора.
Покажем возможность практической реализации электродвигателя по методике, изложенной в [Проектирование электрических машин: Учебник. О.Д.Гольдберг, Н.С.Свириденко, 3-е изд. Перераб., М.: Высшая школа, 2006]. Считаем, что в проектируемом асинхронном электродвигателе заданы основные требуемые данные и стандартные габаритные размеры:
Pном=630 кВт; h=450 мм; m=96; f=50 Гц; U1=1000 В; n1=450 мм;
η=0,96; cosφ=0,8.
Для 96-фазного электродвигателя были получены следующие расчетные данные:
внутренний диаметр сердечника статора D1=480 мм;
длина сердечника статора l1=690 мм;
число пазов статора z1=191;
линейная нагрузка статора А=150 А/см;
количество витков в обмотке фазы статора W1=14;
номинальный фазный ток статора I1=7,6 А.
При прямоугольных открытых пазах и обмотке из прямоугольного провода:
высота паза hп1=31 мм;
ширина паза bп1=4,6 мм;
плотность тока в обмотке статора j=1,83 А/мм2;
расход меди на обмотку статора Gm=144 кг;
суммарные потери в электродвигателе ΔР∑=17,8 кВт;
кратность максимального момента  .
.
Для 3-фазного асинхронного электродвигателя с теми же номинальными данными при прямоугольных открытых пазах и обмотке из прямоугольного провода получены следующие данные:
номинальный фазный ток I1=243 А;
плотность тока j=1,43 А/мм2;
расход меди на обмотку статора Gm=282 кг;
суммарные потери в электродвигателе ΔP∑=20,2 кВт;
кратность максимального момента  .
.
Расчетные данные показывают возможность практической реализации полифазного электродвигателя с количеством фаз, равным 96, в габаритах стандартного 3-фазного электродвигателя с одинаковыми их мощностями. Очень важным фактором практической реализации полифазной машины является то, что конструкция серийно выпускаемых асинхронных электродвигателей сохраняется без изменений.
На фиг.3 приведена схема устройства, реализующего предлагаемый способ.
Устройство включает в себя следующие блоки:
1 - блок ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами;
2 - блок измерения рабочих параметров;
3 - блок сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака;
4 - блок автоматического управления режимами работы силового электродвигателя;
5 - блок формирования сигналов всех режимов работы силового электродвигателя;:
6 - блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии;
7 - автоматический коммутатор фаз;
8 - 96-фазный мостовой транзисторный автономный инвертор напряжения (АИН);
9 - регулятор тока возбуждения генератора;
10 - регулятор уровня напряжения приводного электродвигателя;
11 - приводной электродвигатель;
12 - генератор полифазного синусоидального сигнала;
13 - блок задаваемых параметров и учета групп с нерабочими фазами;
14 - силовой электродвигатель с 96-фазными статорными обмотками;
15 - силовой коммутационный блок;
16 - блок датчиков измеряемых и контролируемых параметров;
17 - блок оценки количества нерабочих фаз;
18 - блок вычисления группы с нерабочими фазами;
19 - блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии.
Выключатель (на чертеже отдельной позицией не обозначен) подает переменное напряжение одновременно на входы двух выпрямителей переменного тока в постоянный.
Первый выход выключателя подключен к входу силового выпрямителя силового коммутационного блока 15, а второй выход - к входу слаботочного выпрямителя (на чертеже отдельной позицией не обозначен), питающему постоянным током все блоки системы ручного и автоматического управления режимами работы силового электродвигателя 14.
Силовой коммутационный блок 15 включает в себя силовой выпрямитель, сетевой фильтр, блок защитных цепей и датчиков напряжения и тока (на чертеже отдельно не показаны) для выпрямления переменного тока в постоянный, фильтрации выпрямленного тока и защиты от перенапряжений.
Силовой выпрямитель блока 15 подключен к первому входу 96-фазного мостового транзисторного АИН 8, выход которого подключен к 96-фазной статорной обмотке силового электродвигателя 14. Статорные обмотки 96 фаз силового электродвигателя 14 скомпонованы в 16 групп по 6 фаз в каждой группе, которые составляют режим максимального момента силового электродвигателя, причем из них 8 групп по 6 фаз в каждой группе составляют режим максимальной экономии электроэнергии. В генераторе 12 полифазного синусоидального сигнала обмотки фаз генератора также скомпонованы в 16 групп по 6 фаз в каждой группе, которые составляют режим максимального момента силового электродвигателя, причем из них 8 групп по 6 фаз в каждой группе составляют режим максимальной экономии электроэнергии. С выхода силового электродвигателя 14 снимаются данные о скорости вращения при помощи датчика (ТГ), который соединен со вторым входом блока 16 датчиков измеряемых и контролируемых параметров.
В силовом коммутационном блоке 15 выход его блока защитных цепей и датчиков напряжения и тока соединен с блоком 16, у которого датчики измеряемых и контролируемых параметров подключены к входам блока 2 измерения рабочих параметров. Выход блока 2 подключен к первому входу блока 3 сравнения задаваемых параметров с измеряемыми, в котором осуществляется сравнение задаваемых величин с измеряемыми и оценка разности с учетом знака. С первого выхода блока 13 задаваемых параметров и учета групп с нерабочими фазами к второму входу блока 3 поступают задаваемые величины момента, тока возбуждения и скорости вращения вала генератора. Второй выход блока 13 соединен с первым входом блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. Выход блока 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака соединен с первым входом блока 4 автоматического управления режимами работы силового электродвигателя, на который поступает разность сравниваемых параметров. Второй вход блока 4 соединен с первым выходом блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. Сигнал с блока 1 является разрешающим для работы блока 4 автоматического управления режимами работы силового электродвигателя. Выход блока 4 подключен к первому входу блока 5 формирования сигналов всех режимов работы силового двигателя. Блок 5 по своим каналам коммутирует данные величин о токе возбуждения и скорости вращения генератора 12. Второй вход блока 5 соединен со вторым выходом блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. С блока 1 поступает сигнал с амплитудой, разрешающей работу блока 5. Вход блока 6 автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии подключен к третьему выходу блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. Первый выход блока 5 соединен с входом регулятора 9 тока возбуждения генератора, в котором регулируется величина тока возбуждения генератора 12 полифазного синусоидального сигнала. Выход регулятора 9 тока возбуждения генератора соединен с входом обмотки возбуждения генератора 12. Вал ротора генератора 12 жестко связан с валом ротора приводного двигателя 11, вход которого соединен с выходом регулятора 10 уровня напряжения. Напряжение, сформированное в регуляторе 10, обеспечивает регулирование скорости приводного двигателя 11.
Вход регулятора 10 уровня напряжения подключен ко второму выходу блока 5 формирования сигналов всех режимов работы силового электродвигателя. Выход генератора 12 полифазного синусоидального сигнала соединен с первым входом автоматического коммутатора фаз 7. Выход автоматического коммутатора фаз 7 подключен к второму входу 96-фазного мостового транзисторного АИН 8. Выход 96-фазного мостового транзисторного АИН 8 соединен с силовым электродвигателем 14 с 96-фазными статорными обмотками, чем обеспечивается подача частотно-управляемых полифазных синусоидальных сигналов на разные группы обмоток силового электродвигателя 14.
Блок 17 оценки количества нерабочих фаз подключен к второму выходу 96-фазного мостового транзисторного АИН 8 и соединен с входом блока 18 вычисления группы с нерабочими фазами. В блоке 18 определяют, к какой группе относится нерабочая фаза, чтобы данную группу фаз не включать в группу рабочих фаз. Выход блока 18 одновременно подключен и к входу блока 13 задаваемых параметров и учета групп с нерабочими фазами, и к второму входу блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. В блоке 13 и блоке 1 группы с нерабочими фазами исключаются из группы рабочих фаз. Первый и второй выходы блока 6 автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии подключены соответственно к первому и второму входам блока 19 раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии. Блок 6 определяет установление номера режима. Выход блока 19 подключен к второму входу автоматического коммутатора фаз 7. На второй вход автоматического коммутатора фаз 7 поступают раздельно или сигналы режима максимального момента силового электродвигателя 14, или сигналы режима максимальной экономии электрической энергии.
Способ осуществляют следующим образом.
В блок 13 задаваемых параметров и учета групп с нерабочими фазами вводят программу режимов всего цикла работы силового электродвигателя 14 с 96-фазными статорными обмотками, в том числе два новых режима: первый режим максимального момента во время пуска силового электродвигателя и второй режим максимальной экономии электроэнергии, в установившемся режиме работы. Рассчитывают числовые данные программно-управляемых параметров: количество групп фаз (mзад) с учетом групп с нерабочими фазами, момента (mзад), силы тока возбуждения генератора (Iв зад.), частоту вращения вала ротора генератора (nген.зад.), которые поступают с первого выхода блока 13 на второй вход блока 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака. На первый вход блока 3 поступают измеренные данные М, n. Iв с выхода блока 2 измерения рабочих параметров. На вход блока 2 подают данные параметры соответствующих датчиков блока 16 датчиков измеряемых и контролируемых параметров. С выхода блока 3 разности величин со знаками плюс или минус поступают на первый вход блока 4 автоматического управления режимами работы силового электродвигателя, устанавливающего номер режима работы силового электродвигателя 14. На второй вход блока 4 подается сигнал с блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, разрешающего прохождение разностных сигналов на первый вход блока 5 формирования сигналов всех режимов работы силового электродвигателя, преобразующий разностные величины в цифровой код. На второй вход блока 5 поступает управляющий сигнал с блока 1, разрешающий прохождение сигналов с блока 4 в блок 5. С первого выхода блока 5 разностная величина (числовое значение) тока возбуждения поступает на вход регулятора 9 тока возбуждения генератора, где формируется и измеряется величина тока возбуждения, которую подают на обмотку возбуждения генератора 12 полифазного синусоидального сигнала с приводным электродвигателем 11. Со второго выхода блока 5 формирования сигналов всех режимов работы силового электродвигателя разностное дискретное значение скорости вращения ротора приводного двигателя 11 поступает на вход регулятора 10 уровня напряжения приводного двигателя, где по разностным величинам формируют аналоговое напряжение, которое подают на вход приводного двигателя 11, вал ротора которого жестко связан с валом ротора генератора 12, поэтому nпр равна nген В генераторе 12 формируется полифазный синусоидальный сигнал, амплитуда которого пропорциональна току возбуждения, а частота сигнала fген будет равна:
fген=nген pген; где pген - число пар полюсов генератора.
Этот полифазный сигнал через автоматический коммутатор фаз 7 поступает на вход 96-фазного мостового транзисторного автономного инвертора напряжения 8. Выходные величины - количество групп фаз, токов фаз и напряжений АИН, подаваемые на фазовые обмотки статора силового электродвигателя 14, определяют параметры механической характеристики электродвигателя. В процессе работы количество групп фаз, величины момента силового электродвигателя 14, тока возбуждения генератора 12, скорости вращения вала генератора 12 измеряют датчиками блока 16. Эти параметры поступают в блок 2 измерения рабочих параметров, в котором каждый из параметров отсчитывают в течение времени Δt и усредняют, а усредненные величины подают в блок 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака. При наличии разности сравниваемых величин корректируют или скорость вращения, или ток возбуждения, или количество групп фаз или все эти программно-управляемых параметры одновременно. В процессе эксплуатации силового электродвигателя 14 в блоке 17 оценки количества нерабочих фаз контролируется наличие нерабочих фаз и фиксируется их порядковый номер, который в виде сигнала передается в блок 18 вычисления группы с нерабочими фазами. В блоке 18 определяется, к какой группе относится нерабочая фаза генератора 12 и АИН 8, чтобы данную группу фаз не включать в группу рабочих фаз генератора 12 и АИН 8. Данные о вычисленной группе с нерабочими фазами в виде сигнала одновременно поступают на вход блока 13 задаваемых параметров и учета групп с нерабочими фазами и на второй вход блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. Эти группы с нерабочими фазами в работу силового электродвигателя 14 не включаются ни в режиме максимального момента, ни в режиме максимальной экономии электрической энергии. Если общее количество групп с нерабочими фазами будет менее восьми, то силовой электродвигатель 14 отправляют на профилактический ремонт для восстановления нерабочих фаз.
В процессе работы, в экстренных случаях, возможно ручное управление режимами работы электродвигателей (особенно на железнодорожном транспорте). В этом случае с блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами на второй вход блока 4 автоматического управления режимами работы силового электродвигателя подают сигнал запрета прохождения сигналов с блока 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, а на второй вход блока 5 формирования сигналов всех режимов работы силового электродвигателя подают сигнал режима работы с второго выхода блока 1, величины подаваемых сигналов измеряют.
Работа предлагаемого устройства на примере работы тягового электродвигателя.
Переменное напряжение с выходов выключателя (он на чертеже отдельной позицией не обозначен) подается одновременно на входы двух выпрямителей переменного тока в постоянный.
Первый выход выключателя подключается к входу силового выпрямителя (на чертеже не показан) силового коммутационного блока 15, где, кроме выпрямления переменного тока, производится фильтрация выпрямленного тока для снижения пульсаций и защита от перенапряжений. Первый выход силового выпрямителя подключается к входу 96-фазного мостового транзисторного АИН 8 для питания силовых транзисторов АИН, а второй выход соединяется с первым входом блока 16 датчиков измеряемых и контролируемых параметров. На второй вход блока 16, соединенный с датчиком ТГ, подаются данные о скорости вращения вала ротора тягового электродвигателя 14. На второй вход 96-фазного мостового транзисторного АИН 8, соединенного с выходом автоматического коммутатора фаз 7 генератора, подаются управляющие полифазные синусоидальные сигналы. Выход 96-фазного мостового транзисторного АИН 8 подключается к 96-фазным статорным обмоткам тягового электродвигателя 14, с выхода которого снимаются данные о его скорости при помощи датчика (ТГ).
Второй выход выключателя переменного тока подключается к слаботочному выпрямителю, питающему постоянным током все блоки системы ручного и автоматического управления режимами работы тягового электродвигателя 14 (блоки 1, 2, 3, 4, 5, 6, 7, 9, 10, 11, 12, 13, 16, 17, 18, 19).
Устройство работает по программе, заложенной в блоке 13 задаваемых параметров и учета групп с нерабочими фазами. Режимы работы устройства, в том числе, первый режим максимального момента силового электродвигателя и второй режим максимальной экономии электрической энергии, в виде заданных параметров одновременно поступают на входы двух блоков: блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, а также блока 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака. На второй вход блока 3 с первого выхода блока 13 поступают заданные параметры, а на первый вход блока 3 с выхода блока 2 измерения рабочих параметров - измеренные данные. На вход блока 2 данные об измеряемых параметрах поступают с выхода блока 16 датчиков измеряемых и контролируемых параметров.
В блоке 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака проходит сравнение заданных параметров, данные о которых с выхода блока 3 поступают на первый вход блока 4 автоматического управления режимами работы силового электродвигателя 14. Второй вход блока 4 связан с первым выходом блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами генератора и АИН. Сигнал с блока 1 блокирует работу блока 4 автоматического управления режимами работы силового электродвигателя при переходе на ручное управление. Выход блока 4 подключен к первому входу блока 5 формирования сигналов всех режимов работы силового электродвигателя. В блоке 5 происходит разделение управляющих сигналов режимов работы силового электродвигателя 14 и преобразования их из цифрового вида в аналоговый. Первый выход блока 5 соединен с входом регулятора 9 тока возбуждения генератора, а второй выход соединен с входом регулятора 10 уровня напряжения. Выход регулятора 9 подключен к входу генератора 12. Выход регулятора 10 уровня напряжения подключен к входу приводного электродвигателя 11. Вал ротора приводного электродвигателя 11 жестко связан с валом ротора генератора 12 полифазного синусоидального сигнала.
При ручном управлении блок 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами сигналом с первого выхода, подключенного ко второму входу блока 4 автоматического управления режимами работы силового электродвигателя, блокируется работа блока 4. Второй выход блока 1 подключен ко второму входу блока 5 формирования сигналов всех режимов работы силового электродвигателя. Программно-управляющие сигналы с блока 13 задаваемых параметров и учета групп с нерабочими фазами через второй выход блока 13 и второй выход блока 1 поступают непосредственно в блок 5 формирования сигналов всех режимов работы силового электродвигателя. Далее управление тяговым электродвигателем 14 осуществляется через регулятор 9 тока возбуждения генератора, регулятор 10 уровня напряжения приводного электродвигателя, генератор 12 полифазного синусоидального сигнала с приводным двигателем 11, автоматический коммутатор фаз 7 генератора.
Третий выход блока 1 соединен с входом блока 6 автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии. Выход генератора 12 соединен с первым входом автоматического коммутатора фаз 7. При ручном управлении перестраивается количество выходных фаз в автоматическом коммутаторе фаз 7.
Тяговый электродвигатель 14 после включения источника питания управляется или автоматически через блок 4 автоматического управления режимами работы силового электродвигателя, или вручную через блок 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. Программа задаваемых параметров разных режимов работы тягового электродвигателя 14 записывается в блоке 13 задаваемых параметров и учета групп с нерабочими фазами. С началом работы («t=0») задаваемые параметры содержат информацию о том, что первый режим является режимом максимального момента во время пуска тягового электродвигателя 14, т.е. первый режим является режимом пуска с максимальным моментом на валу тягового электродвигателя (режимом с включением в работу всех 96-ти фаз - 16 групп фаз по 6 фаз в каждой группе - с набором частоты вращения вала ротора тягового электродвигателя 14 от нуля до установившейся частоты номинального значения). При этом напряжение, подаваемое на АИН блока 8, зависит от частоты вращения вала ротора тягового электродвигателя 14 и регулируется частотой тахогенератора ТГ в блоке 15 (от минимально допустимого значения напряжения до номинального при номинальной скорости вращения, поддерживая при этом режим максимального момента на валу ротора тягового электродвигателя 14). Величина момента с изменением скорости вращения также меняется от минимально допустимого значения до максимального момента на валу тягового электродвигателя 14 при достижении номинальной скорости вращения. С началом работы («t=0») задаваемые параметры с блока 13 через первый выход поступают на второй вход блока 3 сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, а через второй выход блока 13 - на первый вход блока 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами. Момент времени «t=0» определяет режим пуска с максимальным моментом на валу тягового электродвигателя - «трогание» электроподвижного состава, поэтому его скорость и другие параметры равны нулю. В связи с этим на первый вход блока 16 датчиков измеряемых и контролируемых параметров поступает только значение напряжения с силового выпрямителя силового коммутационного блока 15, выход которого подключен к входу блока 2 измерения рабочих параметров. Выход блока 2 измерения рабочих параметров подключен к первому входу блока 3 сравнения задаваемых параметров с измеренными и оценки разности с учетом знака. Так как при моменте времени «t=0» с выхода блока 2 на первый вход блока 3 поступают нулевые значения измеряемых параметров, то с выхода блока 3 на вход блока 4 автоматического управления режимами работы силового электродвигателя поступают величины задаваемых параметров максимального значения количества групп фаз, тока возбуждения генератора 12 полифазного синусоидального сигнала и минимального значения скорости вращения вала ротора приводного электродвигателя 11, соответствующих режиму пуска с максимальным моментом на валу тягового электродвигателя 14. Эти данные о количестве групп фаз, токе возбуждения генератора 12 и уровне напряжения приводного электродвигателя 11 с выхода блока 4 автоматического управления режимами работы силового электродвигателя поступают на первый вход блока 5 формирования сигналов всех режимов работы силового электродвигателя. С первого выхода блока 5 эти данные поступают на вход регулятора 9 тока возбуждения генератора, который меняется от максимального значения Imax до номинального значения Inom в зависимости от частоты вращения вала ротора генератора 12 и обеспечения максимального момента при минимальном напряжении АИН 8. Выход регулятора 9 подключен к первому входу обмотки возбуждения генератора 12 полифазного синусоидального сигнала, формирующего полифазные синусоидальные сигналы с амплитудой, соответствующей уровню тока возбуждения. Второй выход блока 5 формирования сигналов всех режимов работы силового электродвигателя подключен к входу регулятора 10 уровня напряжения приводного электродвигателя 11, которое меняется от минимального уровня Umin до номинального уровня Unom при изменении частоты вращения вала приводного электродвигателя 11. Так как вал ротора приводного двигателя 11 жестко связан с валом ротором генератора 12 полифазного синусоидального сигнала, то в момент «t=0» обеспечивается минимальная скорость вращения вала ротора приводного электродвигателя 11. Поэтому частота полифазных выходных сигналов генератора 12 также минимальна, а момент соответствует максимальному моменту на валу тягового электродвигателя 14.
Выходное напряжение и частота полифазных синусоидальных сигналов генератора 12 через автоматический коммутатор фаз 7 поступают на управляющие электроды 96-фазного мостового транзисторного АИН 8. На выходе 96-фазного мостового транзисторного АИН 8 формируются мощные сигналы, соответствующие максимальному моменту тягового электродвигателя 14. С выхода 96-фазного мостового транзисторного АМН 8 сформированные сигналы подаются на 96-фазные статорные обмотки тягового электродвигателя 14. С поступлением этих сигналов тяговый электродвигатель 14 начинает набирать скорость.
С началом работы тягового электродвигателя 14 в режиме пуска с блока 16 датчиков измеряемых и контролируемых параметров начинают поступать на вход блока 2 измерения рабочих параметров измеряемые параметры, а с выхода блока 2 на первый вход блока 3 сравнения задаваемых параметров с измеренными и оценки разности с учетом знака поступают измеренные и вычисленные данные разных параметров, которые сравниваются как в блоке 3 с заданными параметрами, так и в блоке 1 ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами по приборам. При разности сравниваемых параметров, близких к нулю, тяговый электродвигатель 14 переводится на следующий режим работы после пуска, например разгон тягового электродвигателя 14 до номинальной скорости, с достижением которой тяговый электродвигатель 14 переводится блоком 13 по программе в режим максимальной экономии электрической энергии. При этом в работе остаются только 8 групп фаз по 6 фаз в каждой группе. Остальные 8 групп фаз отключаются от работы.
Управление тяговым электродвигателем 14 может переводиться на автоматический режим работы, при котором блок 4 автоматического управления режимами работы силового электродвигателя разблокируется. При. этом заданные параметры с первого выхода блока 13 задаваемых параметров и учета групп с нерабочими фазами, поступающие на второй вход блока 3 сравнения, отличаются от величины измеренных параметров, поступающих с выхода блока 2 измерения рабочих параметров на первый вход блока 3. С выхода блока 3 сравнения, соединенного с первым входом блока 4 автоматического управления режимами работы силового электродвигателя, значения разности параметров поступают в блок 4, где отмечается номер режима и коды разностных параметров. С выхода блока 4 данные поступают в блок 5 формирования сигналов всех режимов работы силового электродвигателя, где цифровые данные разности о токе возбуждения генератора 12 полифазного синусоидального сигнала и напряжения, определяющего скорость вращения вала ротора приводного электродвигателя 11, преобразуются в аналоговый вид и с первого и второго выходов блока 5 поступают на входы регулятора 9 тока возбуждения генератора и регулятора 10 уровня напряжения приводного электродвигателя соответственно. Выход регулятора 9 тока возбуждения генератора подключен к обмотке возбуждения генератора 12 полифазного синусоидального сигнала, где по значению разности тока возбуждения корректируется амплитуда выходных управляющих полифазных синусоидальных сигналов генератора 12. Выход регулятора 10 уровня напряжения подключен к входу приводного электродвигателя 11, где по разности напряжения изменяется скорость вращения вала ротора приводного электродвигателя 11, следовательно, и частота выходных управляющих полифазных синусоидальных сигналов с выхода генератора 12 полифазного синусоидального сигнала. Эти изменения управляющих параметров через автоматический коммутатор фаз 7 поступают на вход управляющих контактов силовых транзисторов 96-фазного мостового транзисторного АИН 8, с выхода которых измененные величины полифазных синусоидальных сигналов подаются на 96-фазные статорные обмотки тягового электродвигателя 14, который начинает работать в измененном режиме.
В такой последовательности проходит работа тягового электродвигателя 14 во всех режимах работы вплоть до режима «останов электродвигателя».
Предлагаемый способ и устройство позволяют формировать качественные полифазные синусоидальные управляющие сигналы с регулируемой частотой и амплитудой традиционным электромашинным маломощным синхронным (асинхронным) генератором полифазных синусоидальных сигналов, частоту выходных сигналов которого регулируют от нуля до требуемого значения скоростью вращения приводного электродвигателя, вал ротора которого жестко связан с валом ротора генератора полифазного синусоидального сигнала, а амплитуду выходного сигнала генератора регулируют от нуля до предельного, обеспечивающего синусоидальность выходных сигналов, регулированием величины тока возбуждения генератора. Полифазный частотно-регулируемый привод (ЧРП) позволяет в два раза, по сравнению с прототипом, повысить момент электродвигателя, когда силовой электродвигатель имеет 96 фазных статорных обмоток, при этом к ЧРП можно подключать электродвигатели с количеством фазных статорных обмоток меньше максимального количества, отсюда способ становится универсальным. Кроме того, снижаются потери энергии в АИН за счет формирования качественных сигналов управления по закону синуса, а также из-за отсутствия высокочастотных управляющих сигналов, переключающих силовые транзисторы, доходящих до десятка КГц и приводящих к дополнительным потерям как в самих транзисторах, так и с появлением на их выходе узких импульсов, требующих подавления фильтрацией. Способ отличает простота и надежность управления моментом как для электродвигателей промышленного применения, так и для тяговых двигателей электрического транспорта всего тремя независимо управляемыми параметрами (частота, напряжение, группа фаз). Экономия электроэнергии достигается за счет роста вращающей силы в 2 раза и использования энергии 48 фаз для собственных нужд потребителя или рекуперации энергии в сеть. Таким образом, по сравнению с прототипом потребление электрической энергии сокращается в 3,6 раза (в 1,8 раза за счет отключения 8 групп фаз и в 2 раза за счет снижения мощности тягового электродвигателя из-за увеличения силы вращения ротора в 2 раза).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА ФОРМИРОВАНИЕМ В ЭЛЕКТРОПРИВОДЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО СИГНАЛА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2006 |
|
RU2326775C2 |
| Тяговый инвертор электрогрузовика | 2024 |
|
RU2825486C1 |
| Тяговый инвертор электромобильного транспорта | 2024 |
|
RU2824653C1 |
| СПОСОБ СКАЛЯРНОГО УПРАВЛЕНИЯ (3×3)-ФАЗНЫМ МАТРИЧНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2010 |
|
RU2414800C1 |
| Источник бесперебойного питания | 2024 |
|
RU2824589C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2010 |
|
RU2441775C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Способ управления автономным инвертором напряжения | 2016 |
|
RU2654295C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2478255C1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ПОВЫШЕННЫМИ ХАРАКТЕРИСТИКАМИ НАДЕЖНОСТИ | 2012 |
|
RU2488216C1 |
Изобретение относится к области управления параметрами и механическими характеристиками электродвигателей переменного тока. Способ управления заключается в том, что задают два новых режима работы силового электродвигателя. Первый режим максимального момента силового электродвигателя. Второй режим максимальной экономии электрической энергии. Режимы работы силового электродвигателя вводят в блок сравнения задаваемых параметров. Определяют количество нерабочих фаз и формируют сигнал о группе нерабочих фаз. Сигналы учитывают при формировании групп рабочих фаз первого режима максимального момента силового электродвигателя и второго режима максимальной экономии электрической энергии. Устройство содержит блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, блок оценки количества нерабочих фаз, блок вычисления группы с нерабочими фазами, блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии. Технический результат заключается в повышении момента на валу силового электродвигателя и качества формируемого сигнала. 2 н.п. ф-лы, 3 ил.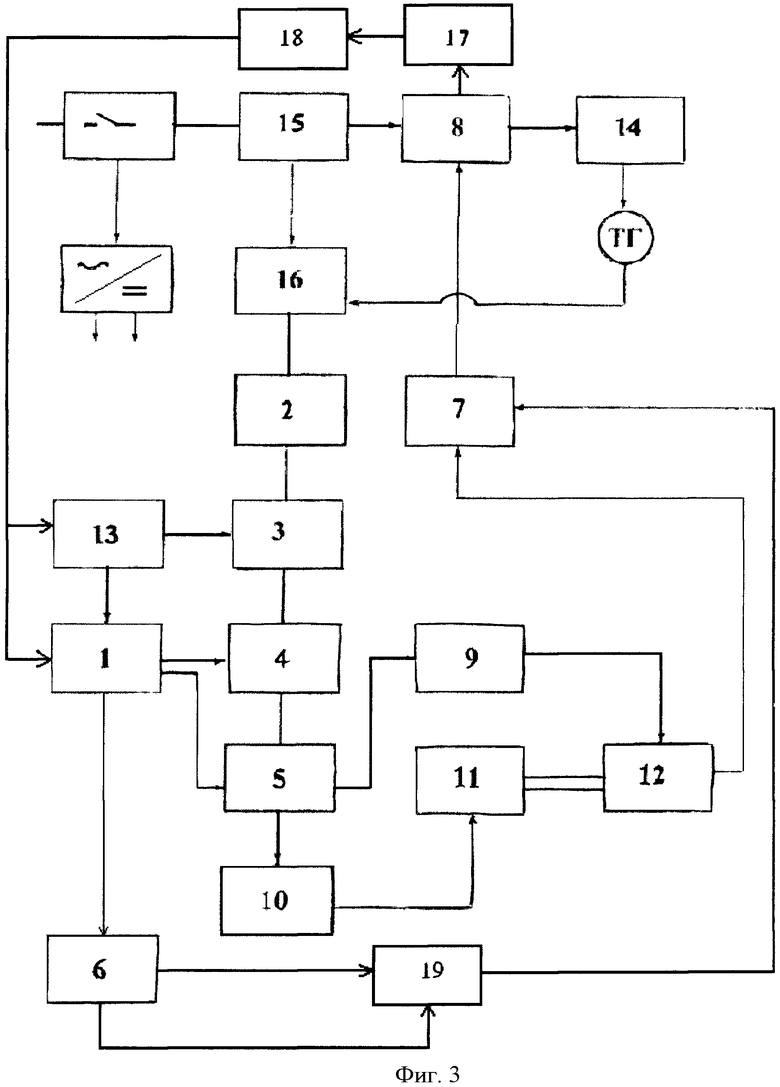
1. Способ управления моментом электродвигателей переменного тока формированием в электроприводе частотно-регулируемого сигнала, согласно которому задают требуемые параметры в блоке задаваемых параметров, измеряют истинные величины параметров, сравнивают заданные величины с измеренными, вычитают из заданных измеренные значения и регулируют соответствующий параметр по разности величин, при этом составляют программу режимов всего цикла работы силового электродвигателя, требуемые и непрерывно измеряемые величины скорости вращения ротора генератора, тока возбуждения генератора, момента электродвигателя вводят в блок сравнения, по разности величин устанавливают режим работы силового электродвигателя с помощью блока автоматического управления режимами работы силового электродвигателя, разность параметров, преобразованную в цифровой код в блоке, формирующем сигналы режимов работы силового электродвигателя, подают через блок регулятора тока возбуждения генератора на обмотку возбуждения генератора многофазного синусоидального сигнала и через блок регулятора уровня напряжения приводного электродвигателя на вход приводного электродвигателя, отличающийся тем, что при составлении программы режимов дополнительно задают два новых режима работы силового электродвигателя: первый режим максимального момента силового электродвигателя, соответствующий 16 группам фаз по 6 фаз в каждой группе, и второй режим максимальной экономии электрической энергии, соответствующий 8 группам фаз по 6 фаз в каждой группе, а в качестве блока задаваемых параметров, блока ручного управления режимами работы силового электродвигателя, генератора многофазного сигнала, коммутатора фаз, m-фазного мостового транзисторного автономного инвертора напряжения, силового электродвигателя, используют соответственно блок задаваемых параметров и учета групп с нерабочими фазами, блок ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, генератор полифазного синусоидального сигнала, в котором обмотки фаз генератора скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие первый режим максимального момента силового электродвигателя, причем из них 8 групп по 6 фаз в каждой группе составляют второй режим максимальной экономии электроэнергии, автоматический коммутатор фаз, 96-фазный мостовой транзисторный автономный инвертор напряжения, силовой электродвигатель с 96-фазными статорными обмотками, в котором обмотки фаз электродвигателя скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие первый режим максимального момента силового электродвигателя, причем из них 8 групп по 6 фаз в каждой группе составляют второй режим максимальной экономии электроэнергии, автоматический коммутатор фаз, при этом для автоматического управления группой рабочих фаз используют блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, для раздельной передачи сигналов двух новых режимов используют блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, для оценки количества нерабочих фаз и вычисления группы с нерабочими фазами используют соответственно блок оценки количества нерабочих фаз и блок вычисления группы с нерабочими фазами, причем два новых режима работы силового электродвигателя вводят в блок сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, в блок автоматического управления режимами работы силового электродвигателя, а также в блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, с выхода которого сигнал о первом и втором режиме подают в блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, с помощью которого выбирают или первый режим максимального момента силового электродвигателя, или второй режим максимальной экономии электрической энергии и подают сигнал выбранного режима в автоматический коммутатор фаз, с помощью генератора с независимым управлением частоты и амплитуды выходных сигналов генерируют полифазный синусоидальный сигнал, который через автоматический коммутатор фаз подают на вход 96-фазного мостового транзисторного автономного инвертора напряжения, с первого и второго выходов которого полифазный синусоидальный сигнал подают соответственно на 96-фазные статорные обмотки силового электродвигателя и в блок оценки количества нерабочих фаз, блок вычисления группы с нерабочими фазами, при помощи которых определяют количество нерабочих фаз и подают сигнал о группе нерабочих фаз одновременно на входы блока задаваемых параметров и учета групп с нерабочими фазами и блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, где эти сигналы учитывают при формировании групп рабочих фаз первого режима максимального момента силового электродвигателя и второго режима максимальной экономии электрической энергии.
2. Устройство для осуществления способа по п.1, содержащее силовой коммутационный блок, включающий последовательно соединенные силовой выпрямитель, сетевой фильтр, блок защитных цепей и датчиков напряжения и тока, m-фазный мостовой транзисторный автономный инвертор напряжения, силовой асинхронный электродвигатель с m-фазной статорной обмоткой, при этом выход блока защитных цепей и датчиков напряжения и тока соединен с последовательно соединенными блоком датчиков измеряемых и контролируемых параметров, блоком измерения рабочих параметров, блоком сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, к второму входу которого подключен первый выход блока задаваемых параметров, блоком автоматического управления режимами работы силового электродвигателя, блоком формирования сигналов всех режимов работы силового электродвигателя, блок ручного управления режимами работы силового электродвигателя, генератор многофазного синусоидального сигнала с приводным электродвигателем, регулятор уровня напряжения приводного электродвигателя, регулятор тока возбуждения генератора, коммутатор фаз, при этом первый вход блока ручного управления режимами работы силового электродвигателя соединен с вторым выходом блока задаваемых параметров, а первый, второй выходы блока ручного управления соединены соответственно с вторым входом блока автоматического управления режимами работы силового электродвигателя, вторым входом блока формирования сигналов всех режимов работы силового электродвигателя, при этом первый выход блока формирования сигналов всех режимов работы силового электродвигателя соединен с входом регулятора тока возбуждения генератора, выход которого соединен с входом генератора многофазного синусоидального сигнала, вал ротора генератора жестко связан с валом ротора приводного электродвигателя, вход которого соединен с выходом регулятора уровня напряжения приводного электродвигателя, вход которого подключен ко второму выходу блока формирования сигналов всех режимов работы силового электродвигателя, при этом выход генератора соединен с первым входом коммутатора фаз, выход которого соединен со вторым входом m-фазного мостового транзисторного автономного инвертора напряжения, выход которого подключен к m-фазной статорной обмотке силового электродвигателя, с выхода которого снимаются данные о скорости при помощи датчика, который соединен со вторым входом блока датчиков измеряемых и контролируемых параметров, отличающееся тем, что в него дополнительно введены блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии, блок раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, блок оценки количества нерабочих фаз, блок вычисления группы с нерабочими фазами, при этом генератор многофазного синусоидального сигнала выполнен в виде генератора полифазного синусоидального сигнала, причем обмотки фаз генератора скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие режим максимального момента силового электродвигателя, из них 8 групп по 6 фаз в каждой группе составляют режим максимальной экономии электроэнергии, а m-фазные статорные обмотки силового электродвигателя, m-фазный мостовой транзисторный автономный инвертор напряжения, блок задаваемых параметров, блок ручного управления режимами работы силового электродвигателя, коммутатор фаз, выполнены соответственно в виде 96-фазных статорных обмоток, которые скомпонованы в 16 групп по 6 фаз в каждой группе, составляющие режим максимального момента силового электродвигателя, из них 8 групп по 6 фаз в каждой группе составляют режим максимальной экономии электроэнергии, 96-фазного мостового транзисторного автономного инвертора напряжения, блока задаваемых параметров и учета групп с нерабочими фазами, блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, автоматического коммутатора фаз, при этом блок автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии подключен к третьему выходу блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, блок оценки количества нерабочих фаз подключен к второму выходу 96-фазного мостового транзисторного автономного инвертора напряжения и соединен с входом блока вычисления группы с нерабочими фазами, выход которого одновременно подключен и к входу блока задаваемых параметров и учета групп с нерабочими фазами, и к второму входу блока ручного управления режимами работы силового электродвигателя и учета групп с нерабочими фазами, а первый и второй выходы блока автоматического управления группой рабочих фаз режима максимального момента силового электродвигателя и режима максимальной экономии электрической энергии подключены соответственно к первому и второму входам блока раздельной передачи сигнала режима максимального момента силового электродвигателя и сигнала режима максимальной экономии электрической энергии, выход которого подключен к второму входу автоматического коммутатора фаз.
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА ФОРМИРОВАНИЕМ В ЭЛЕКТРОПРИВОДЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО СИГНАЛА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2006 |
|
RU2326775C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Вентилируемый закром | 1972 |
|
SU579513A1 |

