Изобретение относится к области управления параметрами и механическими характеристиками электродвигателей переменного тока и может быть использовано в электрическом транспорте и промышленности.
Известны способ управления параметрами 3-фазного электродвигателя переменного тока частотно-регулируемого электропривода и устройство для осуществления способа, описанные в книге Клевцова А.В. Средства оптимизации потребления электроэнергии. - Москва, издательство Солон-Пресс, 2004, с.46-66, рис.3.14 (прототип).
Способ заключается в том, что с блока коммутатора переменное напряжение подают одновременно на два выпрямителя переменного тока в постоянный, один из которых силовой, другой - слаботочный. В силовом - выпрямляют и постоянный ток подают в блок фильтров для снижения пульсаций постоянного тока, а с выхода блока фильтров постоянный ток поступает как на коллекторы силовых транзисторов автономного инвертора напряжения (АИН), так и систему контроля и измерения напряжения источника питания постоянного тока. В слаботочном - выпрямляют, фильтруют для снижения пульсаций постоянного тока и постоянный ток подают для питания схем блока управления.
В блоке управления на вход сигнального процессора подают сигнал управления процессором, процессор формирует управляющие трехфазные сигналы с заданными параметрами: формой, частотой токов и напряжением источников питания электродвигателя, потокосцеплениями ротора и статора, скоростью вращения ротора электродвигателя, его моментом, для автономного инвертора напряжения по закону широтно-импульсной модуляции, с выхода процессора сигналы поступают на входы силовых транзисторов АИН. Управляющие трехфазные сигналы в процессе формирования могут быть как синусоидальной, так и трапецеидальной формы, которые обеспечивают кратковременный повышенный момент во время пуска из-за форсированного, насыщенного током режима работы силовых транзисторов АИН. С выхода АИН трехфазное напряжение поступает на статорные обмотки электродвигателя переменного тока. Выходные сигналы АИН, векторы фазных напряжений и их частоты измеряют, измеряют скорость вращения ротора электродвигателя, измеренные величины подают на вход сигнального процессора, где вычисляют момент. В процессоре измеренные, вычисленные параметры сравниваются с заданными и формируется сигнал корректировки управляющих трехфазных сигналов, которые поступают на вход АИН.
Устройство, осуществляющее этот способ, включает силовой коммутационный блок, содержащий два выпрямителя переменного тока в постоянный с сетевыми фильтрами для снижения пульсаций постоянного тока. Первый силовой выпрямитель соединен с m-фазным мостовым транзисторным автономным инвертором напряжения и питает постоянным током силовые транзисторы АИН, второй слаботочный выпрямитель соединен с блоком автоматического управления режимами работы силового электродвигателя и питает постоянным током блок управления. Блок управления, предназначенный для формирования управляющих трехфазных сигналов, вычисления и измерения рабочих параметров силового электродвигателя и выработки корректирующих параметров, соединен с m-фазным мостовым транзисторным автономным инвертором напряжения и измерителем скорости вращения ротора силового электродвигателя, что обеспечивает передачу данных на m-фазный мостовой транзисторный автономный инвертор напряжения, прием рабочих параметров электродвигателя, формирование сигналов коррекции и передачу их в блок инвертора, к которому непосредственно подключен силовой электродвигатель, статорные обмотки которого соединены с выходами трехфазных источников питания, к которым подсоединены также измерители векторов тока и напряжения фаз, контроля форм и частоты выходных сигналов m-фазного мостового транзисторного автономного инвертора напряжения.
Недостатками способа и устройства являются значительные энергетические потери в частотно-регулируемом электроприводе, связанные с формированием трехфазного источника питания по широтно-импульсной модуляции, возникновение очень коротких импульсов в выходном сигнале m-фазного мостового транзисторного автономного инвертора напряжения при переключении транзисторов АИН с частотами до 20-25 кГц, что отрицательно влияет на состояние межвитковой изоляции электродвигателей, а также приводит к повышенным потерям энергии в самих транзисторах. Кроме того, практически невозможно подключить к частотно-регулируемому электроприводу электродвигатели с количеством фаз более 3, имеющие повышенный момент.
Задачей изобретения является повышение момента на валу силового электродвигателя переменного тока при упрощении системы управления электродвигателем и повышении качества формируемого сигнала.
Для получения такого технического результата в предлагаемом способе управления моментом электродвигателей переменного тока формированием в электроприводе частотно регулируемого сигнала, включающем задание требуемых параметров, измерение истинных величин параметров, сравнение заданных величин с измеренными, вычитание из заданных измеренные значения и регулирование соответствующего параметра по разности величин, составляют программу режимов всего цикла работы силового электродвигателя, вводят в блок сравнения задаваемые и непрерывно измеряемые величины скорости вращения ротора генератора, тока возбуждения генератора, момента силового электродвигателя, по разности величин устанавливают режим работы силового электродвигателя с помощью блока автоматического управления режимами работы силового двигателя, разность параметров, преобразованную в цифровой код в блоке формирующем сигналы режимов работы силового электродвигателя, подают через блок регулятора тока возбуждения генератора на обмотку возбуждения генератора и через блок регулятора уровня напряжения приводного электродвигателя на вход приводного электродвигателя, с помощью генератора с независимым управлением частоты и амплитуды выходных сигналов генерируют многофазный синусоидальный сигнал, осуществляют контроль и управление синусоидальностью, частотой и амплитудой сигнала, который через коммутатор фаз подают на вход m-фазного мостового транзисторного автономного инвертора напряжения, усиленный силовыми транзисторами АИН многофазный синусоидальный сигнал с выходов силовых транзисторов подают на обмотки статора силового электродвигателя.
Для достижения названного технического результата предлагается устройство, которое, как и прототип, содержит последовательно соединенные силовой коммутационный блок, включающий силовой выпрямитель, сетевой фильтр и блок защитных цепей и датчиков напряжения и тока; m-фазный мостовой транзисторный автономный инвертор напряжения; силовой асинхронный электродвигатель, при этом выход блока защитных цепей и датчиков напряжения и тока соединен с последовательно соединенными датчиками измеряемых и контролируемых параметров, блоком измерения рабочих параметров, блоком сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака, к которому подключен блок задаваемых параметров, блоком автоматического управления режимами работы силового электродвигателя. В отличие от известного в предлагаемом устройстве дополнительно введены блок ручного управления режимами работы силового электродвигателя, регулятор уровня напряжения, регулятор тока возбуждения генератора, генератор многофазного синусоидального сигнала с приводным электродвигателем, коммутатор фаз, блок переключения количества рабочих фаз генератора, блок формирования сигналов всех режимов работы силового электродвигателя, при этом блок ручного управления соединен с блоком задаваемых параметров и с блоком автоматического управления режимами работы силового электродвигателя, выход которого подключен к первому входу блока формирования сигналов всех режимов работы силового электродвигателя, второй вход которого подключен ко второму выходу блока ручного управления режимами работы силового электродвигателя, при этом первый выход блока формирования сигналов всех режимов работы силового электродвигателя соединен со входом блока регулятора тока возбуждения генератора, выход которого соединен со входом генератора, вал ротора генератора жестко связан с валом ротора приводного электродвигателя, вход которого соединен с выходом блока регулятора уровня напряжения приводного электродвигателя, вход которого подключен ко второму выходу блока формирования всех режимов работы силового электродвигателя, при этом выход генератора соединен с первым входом коммутатора фаз, второй вход которого соединен с выходом блока переключения количества рабочих фаз генератора, который входом соединен с третьим выходом блока ручного управления режимами работы силового электродвигателя, при этом выход блока коммутатора фаз соединен со вторым входом m-фазного мостового транзисторного автономного инвертора напряжения, выход которого подключен к m-фазной статорной обмотке силового электродвигателя, с выхода которого снимаются данные о скорости при помощи датчика, который соединен со вторым входом блока датчиков измеряемых и контролируемых параметров.
На чертеже приведена схема устройства, реализующего способ.
Устройство содержит блок ручного управления режимами работы силового электродвигателя 1; блок измерения рабочих параметров 2; блок сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3; блок автоматического управления режимами работы силового электродвигателя 4; блок формирования сигналов всех режимов работы 5 силового электродвигателя; блок переключения количества рабочих фаз генератора 6 на выходах коммутатора фаз 7 и m-фазного мостового транзисторного автономного инвертора напряжения 8; регулятора тока возбуждения генератора 9; регулятора уровня напряжения 10; генератора многофазного синусоидального сигнала 12 с приводным электродвигателем 11; блока задаваемых параметров 13; силового электродвигателя 14; силовой коммутационный блок 15, включающий два выпрямителя, сетевой фильтр, блок защитных цепей и датчиков напряжения и тока, при этом силовой выпрямитель подключен к m-фазному мостовому транзисторному автономному инвертору напряжения 8, а слаботочный подключен к остальным блокам; блок датчиков измеряемых и контролируемых параметров 16. При этом датчики измеряемых и контролируемых параметров 16 подключены к входам блока измерения рабочих параметров 2, выход которого подключен к первому входу блока сравнения задаваемых параметров с измеряемыми 3, в котором осуществляется сравнение задаваемых величин с измеряемыми, ко второму входу блока 3 поступают задаваемые величины момента, тока возбуждения и скорости вращения вала генератора с выхода блока задаваемых параметров 13, выход блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3 соединен с входом блока автоматического управления режимами работы силового электродвигателя 4, на который поступает разность сравниваемых параметров, второй вход которого соединен с первым выходом блока ручного управления режимами работы силового электродвигателя 1, сигнал с которого является разрешающим работу блока автоматического управления режимами работы силового электродвигателя 4, выход блока автоматического управления режимами работы силового электродвигателя 4 подключен к первому входу блока формирования сигналов всех режимов работы силового двигателя 5, который коммутирует данные величин о токе возбуждения и скорости вращения генератора по своим каналам; второй вход блока формирования сигналов всех режимов работы силового электродвигателя 5 соединен со вторым выходом блока ручного управления режимами работы силового электродвигателя 1, с которого поступает сигнал с амплитудой, разрешающей работу блока формирования сигналов всех режимов работы силового двигателя 5, первый выход которого соединен с входом регулятора тока возбуждения генератора 9, в котором регулируют величину тока возбуждения генератора, а выход регулятора тока возбуждения генератора 9 соединен с входом обмотки возбуждения генератора 12, вал ротора генератора жестко связан с валом ротора приводного двигателя 11, вход которого соединен с выходом регулятора уровня напряжения приводного электродвигателя 10, сформированное напряжение в котором обеспечивает регулирование скорости приводного двигателя, а вход регулятора уровня напряжения 9 подключен ко второму выходу блока формирования сигналов всех режимов работы силового электродвигателя 5, выход генератора 12 соединен с первым входом коммутатора фаз 7, второй вход которого подключен к выходу блока переключения количества рабочих фаз генератора 6, вход которого подключен к блоку ручного управления режимами работы силового электродвигателя 1, а выход коммутатора фаз 7 подключен к m-фазному мостовому транзисторному автономному инвертору напряжения 8, выход m-фазного мостового транзисторного автономного инвертора напряжения 8 соединен с силовым электродвигателем 14, чем обеспечивается подача частотно-управляемых синусоидальных сигналов на m-фазные обмотки силового электродвигателя.
При ручном управлении силовым электродвигателем сигналы с первого и второго выходов блока ручного управления режимами работы силового электродвигателя 1 снимают, а управляющие сигналы с третьего выхода блока ручного управления режимами работы силового электродвигателя 1 поступают на третий вход блока формирования сигналов всех режимов работы силового электродвигателя 5, а четвертый выход блока ручного управления режимами работы силового электродвигателя 1 соединен со входом блока переключения количества рабочих фаз генератора 6.
Способ осуществляется следующим образом.
В блок задаваемых параметров 13 вводят программу режимов всего цикла работы электродвигателя и рассчитывают числовые данные программно-управляемых параметров: момента (Мзад), силы тока возбуждения генератора (Iв. зад), частоту вращения вала ротора генератора (nген.зад), которые поступают на первый вход блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3, на второй вход которого поступают измеренные данные М, n, Iв с выхода блока измерения рабочих параметров 2, на вход которого подают данные параметры соответствующих датчиков. С выхода блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3 разности величин со знаками плюс или минус поступают на первый вход блока автоматического управления режимами работы силового электродвигателя 4, устанавливающего номер режима работы электродвигателя, на второй вход которого подается сигнал с блока ручного управления режимами работы силового электродвигателя 1, разрешающий прохождение разностных сигналов на первый вход блока формирования сигналов всех режимов работы силового электродвигателя 5, преобразующий разностные величины в цифровой код. На второй вход блока формирования сигналов всех режимов работы силового электродвигателя 5 поступает управляющий сигнал с блока ручного управления режимами работы силового электродвигателя 1, разрешающий прохождение сигналов с блока автоматического управления режимами работы силового электродвигателя 4 в блок формирования сигналов всех режимов работы силового электродвигателя 5. С первого выхода блока 5 разностная величина (числовое значение) тока возбуждения поступает на вход регулятора тока возбуждения генератора 9, где формируется и измеряется величина тока возбуждения, которую подают на обмотку возбуждения генератора многофазного синусоидального сигнала с приводным электродвигателем 11. Со второго выхода блока формирования сигналов всех режимов работы силового электродвигателя 5 разностное дискретное значение скорости вращения ротора приводного двигателя поступает на вход регулятора уровня напряжения приводного двигателя 10, где по разностным величинам формируют аналоговое напряжение, которое подают на вход приводного двигателя 11, ротор которого жестко связан с ротором генератора 12, поэтому nпр равна nген. В генераторе формируется многофазный синусоидальный сигнал, амплитуда которого пропорциональна току возбуждения, а частота сигнала (fген) будет
(fген)=nген pген,
где рген - число пар полюсов генератора.
Этот многофазный сигнал через коммутатор фаз 7 поступает на вход m-фазного мостового транзисторного автономного инвертора напряжения 8. Выходные величины токов фаз и напряжений АИН, подаваемые на фазовые обмотки статора силового электродвигателя 14, определяют параметры механической характеристики электродвигателя. В процессе работы величины момента, тока возбуждения генератора, скорости вращения вала генератора измеряют датчиками и они поступают в блок измерения рабочих параметров 2, в котором каждый из параметров отсчитывают в течение времени Δt и усредняют, а усредненные величины подают в блок сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3. При наличии разности сравниваемых величин корректируют или скорость вращения, или ток возбуждения, или оба этих программно-управляемых параметра одновременно.
В процессе работы, в экстренных случаях, возможно ручное управление режимами работы электродвигателей (особенно на железнодорожном транспорте). В этом случае с блока ручного управления режимами работы силового электродвигателя 1 на второй вход блока автоматического управления режимами работы силового электродвигателя 4 подают сигнал запрета прохождения сигналов с блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3, а на 3-й вход блока формирования сигналов всех режимов работы 5 силового электродвигателя подают сигнал режима работы с 3-го выхода блока ручного управления режимами работы силового электродвигателя 1, величины подаваемых сигналов измеряют.
Работа предлагаемого устройства осуществляется следующим образом.
Подается переменное напряжение с выхода выключателя, одновременно на входы двух выпрямителей переменного тока в постоянный. Первый выход выключателя подключается к входу силового выпрямителя силового коммутационного блока 15, где кроме выпрямления переменного тока производится фильтрация выпрямленного тока для снижения пульсаций и защита от перенапряжений. Первый выход силового выпрямителя подключается к входу m-фазного мостового транзисторного автономного инвертора напряжения 8 для питания силовых транзисторов АИН, а второй выход соединяется с первым входом блока датчиков измеряемых и контролируемых параметров 16, на второй вход которого, соединенный с датчиком скорости силового электродвигателя 14, подаются данные о скорости. На второй вход m-фазного мостового транзисторного автономного инвертора напряжения 8, соединенного с выходом коммутатора фаз 7, подаются управляющие синусоидальные m-фазные сигналы, а выход m-фазного мостового транзисторного АИН подключен к m-фазным статорным обмоткам силового электродвигателя 14, с выхода которого снимаются данные о его скорости при помощи датчика (ТГ).
Второй выход выключателя переменного тока подключается к слаботочному выпрямителю источника питания остальных блоков, где переменный ток выпрямителя фильтруется.
Устройство работает по программе, заложенной в блоке задаваемых параметров 13, режимы работы устройства в виде заданных параметров одновременно поступают на входы двух блоков: блока ручного управления режимами работы силового электродвигателя 1 и блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3, которые подключены соответственно к первому и второму выходам блока задаваемых параметров 13. На первый вход блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3 с блока задаваемых параметров 13 поступают заданные параметры, а на второй вход, подключенный к выходу блока измерения рабочих параметров 2, - измеренные данные. На вход блока измерения рабочих параметров 2 данные об измеряемых параметрах поступают с блока датчиков измеряемых и контролируемых параметров 16, выход которого подключен к входу блока 2.
В блоке сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3 проходит сравнение заданных параметров, данные о которых с выхода блока 3 поступают на первый вход блока автоматического управления режимами работы силового электродвигателя 4, второй вход которого связан с первым выходом блока ручного управления режимами работы силового электродвигателя 1, сигнал с которого блокирует работу блока автоматического управления режимами работы силового электродвигателя 4 при переходе на ручное управление. Выход блока 4 подключен к первому входу блока формирования сигналов всех режимов работы 5 силового электродвигателя, где происходит разделение управляющих сигналов режимов работы электродвигателя и преобразования их из цифрового вида в аналоговый. Первый выход блока 5 соединен с входом регулятора тока возбуждения генератора 9, выход которого подключен к входу генератора многофазного синусоидального сигнала 12, а второй выход блока 5 соединен с входом регулятора уровня напряжения 10, выход которого подключен к входу приводного электродвигателя 11, ротор которого жестко связан с ротором генератора 12.
При ручном управлении блок ручного управления режимами работы силового электродвигателя 1 сигналом с первого выхода, подключенного ко второму входу блока автоматического управления режимами работы силового электродвигателя 4, блокирует работу блока 4. Второй вход блока 1 подключается ко второму входу блока формирования сигналов всех режимов работы силового электродвигателя 5, а программно-управляющие сигналы с блока задаваемых параметров 13 через второй выход блока 13 и вход блока ручного управления режимами работы силового электродвигателя 1 поступают через второй выход непосредственно в блок формирования сигналов всех режимов работы 5 силового электродвигателя. Далее управление электродвигателем осуществляется через регулятор тока возбуждения генератора 9, регулятор уровня напряжения 10, генератор многофазного синусоидального сигнала 12 с приводным двигателем 11, коммутатор фаз 7.
Третий выход блока 1 соединен с входом блока переключения количества рабочих фаз генератора 6, выход которого соединен со вторым входом коммутатора фаз 7, при помощи которых при ручном управлении перестраивается количество выходных фаз в коммутаторе фаз 7.
Пример работы тягового двигателя
Тяговый электродвигатель 14 после включения источника питания управляется или автоматически через блок автоматического управления режимами работы силового электродвигателя 4, или вручную через блок ручного управления режимами работы силового электродвигателя 1. Программа задаваемых параметров разных режимов работы силового электродвигателя 14 записывается в блоке задаваемых параметров 13 и с началом работы с t=0 задаваемые параметры с блока 13 через выход 1 поступают на первый вход блока сравнения задаваемых параметров с измеряемыми и оценки разности с учетом знака 3, а с выхода 2 - на вход блока ручного управления режимами работы силового электродвигателя 1.
Момент времени t=0 определяет режим трогания электроподвижного состава, поэтому как его скорость, так и другие параметры равны нулю, в связи с чем на вход блока датчиков измеряемых и контролируемых параметров 16 поступает только значение напряжения с силового выпрямителя силового коммутационного блока 15, выход которого подключен к входу блока измерения рабочих параметров 2. Выход блока измерения рабочих параметров 2 подключен ко второму входу блока сравнения задаваемых параметров с измеренными и оценки разности с учетом знака 3, и так как при t=0 с выхода блока 2 на второй вход блока сравнения задаваемых параметров с измеренными и оценки разности с учетом знака 3 поступают нулевые значения измеряемых параметров, то с выхода блока сравнения задаваемых параметров с измеренными и оценки разности с учетом знака 3 на вход блока автоматического управления режимами работы силового электродвигателя 4 поступают величины задаваемых параметров максимального значения тока возбуждения генератора 12 и минимального значения напряжения вращения приводного электродвигателя 11, соответствующих режиму пуска силового электродвигателя. Эти данные о токе возбуждения генератора и напряжения приводного двигателя с выхода блока автоматического управления режимами работы силового электродвигателя 4 поступают на второй вход блока формирования сигналов всех режимов работы силового электродвигателя 5, с выхода 2 которого поступают на вход регулятора тока возбуждения генератора 9, выход которого подключен к входу 1 обмотки возбуждения генератора многофазного синусоидального сигнала 12, формирующего многофазные синусоидальные сигналы с амплитудой, соответствующей уровню тока возбуждения.
Второй выход блока формирования сигналов всех режимов работы силового электродвигателя 5 подключен к входу блока регулятора уровня напряжения 10 приводного электродвигателя 11, ротор которого жестко связан с ротором генератора 12, и в момент t=0 обеспечивается минимальная скорость вращения приводного электродвигателя, поэтому частота многофазных выходных сигналов генератора 12 также минимальна.
Выходное напряжение и частота многофазных синусоидальных сигналов генератора 12 через коммутатор фаз 7 поступают на управляющие электроды m-фазного мостового транзисторного АИН 8. На выходе m-фазного мостового транзисторного АИН формируются мощные сигналы, соответствующие максимальному моменту силового электродвигателя. С выхода m-фазного мостового транзисторного АИН сформированные сигналы подаются на статорные обмотки силового электродвигателя 14. С поступлением этих сигналов силовой электродвигатель начинает набирать скорость.
С началом работы силового электродвигателя 14 в режиме пуска с датчиков блока измеряемых и контролируемых параметров 16 начинают поступать на вход блока измерения рабочих параметров 2 измеряемые параметры, а с выхода блока 2 на второй вход блока сравнения задаваемых параметров с измеренными и оценки разности с учетом знака 3 поступают измеренные и вычисленные данные разных параметров, которые сравниваются как в блоке 3 с заданными параметрами, так и в блоке ручного управления режимами работы силового электродвигателя 1 по приборам. При разности сравниваемых параметров, близких к нулю, силовой электродвигатель переводится на следующий режим работы после пуска, например разгон силового электродвигателя до номинальной скорости.
Управление электродвигателем может переводиться на автоматический режим работы, при котором блок автоматического управления режимами работы силового электродвигателя 4 разблокируется. При этом заданные параметры с первого выхода блока задаваемых параметров 13 и поступающие на первый вход блока сравнения 3 отличаются от величины измеренных параметров, поступающих с выхода блока измерения рабочих параметров 2 на второй вход блока сравнения 3.
С выхода блока сравнения задаваемых параметров с измеренными и оценки разности с учетом знака 3, соединенного с первым входом блока автоматического управления 4, значения разности параметров поступают в блок 4, где отмечается номер режима и коды разностных параметров. С выхода блока сравнения задаваемых параметров с измеренными и оценки разности с учетом знака 4, подключенного ко второму входу блока формирования сигналов всех режимов работы силового электродвигателя 5, данные поступают в блок 5, где цифровые данные разности о токе возбуждения генератора многофазного синусоидального сигнала 12 и напряжения, определяющего скорость вращения приводного электродвигателя 11, преобразуются в аналоговый вид и с первого и второго выходов блока формирования сигналов всех режимов работы силового электродвигателя 5 поступают на входы регулятора тока возбуждения генератора 9 и регулятора уровня напряжения 10 соответственно. Выход регулятора тока возбуждения генератора 9 подключается к обмотке возбуждения генератора многофазного синусоидального сигнала 12, где по значению разности тока возбуждения корректируется амплитуда выходных управляющих синусоидальных сигналов генератора многофазного синусоидального сигнала, а выход регулятора уровня напряжения 10 подключается к входу приводного электродвигателя 11, где по разности напряжения изменяется скорость вращения приводного электродвигателя 11, следовательно, и частота выходных управляющих синусоидальных сигналов с выхода генератора многофазного синусоидального сигнала 12. Эти изменения управляющих параметров через коммутатор фаз 7 поступают на вход управляющих контактов силовых транзисторов m-фазного мостового транзисторного АИН 8, с выхода которых измененные величины многофазных синусоидальных сигналов подаются на статорные обмотки силового электродвигателя 14, который начинает работать в измененном режиме.
В такой последовательности проходит работа силового электродвигателя 14 во всех режимах работы вплоть до режима «останов электродвигателя».
Предлагаемый способ и устройство позволяют формировать качественные многофазные синусоидальные управляющие сигналы с регулируемой частотой и амплитудой традиционным электромашинным маломощным синхронным (асинхронным) генератором, частоту выходных сигналов которого регулируют от нуля до требуемого значения скоростью вращения приводного электродвигателя, ротор которого жестко связан с ротором генератора многофазного синусоидального сигнала, а амплитуду выходного сигнала генератора регулируют от нуля до предельного, обеспечивающего синусоидальность выходных сигналов, регулированием величины тока возбуждения генератора. Многофазный частотно-регулируемый привод (ЧРП) позволяет повысить момент электродвигателя, когда электродвигатель имеет более 3 фазных статорных обмоток, при этом к ЧРП можно подключать электродвигатели с количеством фазных статорных обмоток меньше максимального количества, отсюда способ становится универсальным. Кроме того, снижаются потери энергии в АИН за счет формирования качественных сигналов управления по закону синуса и из-за отсутствия переключающих силовые транзисторы высокочастотных управляющих сигналов, доходящих до десятка кГц, приводящих к дополнительным потерям как в самих транзисторах, так и с появлением на их выходе узких импульсов, требующих подавления фильтрацией. Способ отличает простота и надежность управления моментом, как для электродвигателей промышленного применения, так и на электрическом транспорте в качестве тяговых двигателей, всего двумя независимо управляемыми параметрами.
Изобретение относится к области управления параметрами и механическими характеристиками электродвигателей переменного тока. Составляют программу режимов всего цикла работы силового электродвигателя. Требуемые и непрерывно измеряемые величины скорости вращения ротора генератора, тока возбуждения генератора, момента электродвигателя вводят в блок сравнения. По разности величин устанавливают режим работы силового электродвигателя с помощью блока автоматического управления режимами работы силового электродвигателя. Разность параметров, преобразованную в цифровой код в блоке, формирующем сигналы режимов работы силового электродвигателя, подают через блок регулятора тока возбуждения генератора на обмотку возбуждения генератора многофазного синусоидального сигнала и через блок регулятора уровня напряжения приводного электродвигателя на вход приводного электродвигателя. С помощью генератора с независимым управлением частоты и амплитуды выходных сигналов генерируют многофазный синусоидальный сигнал, который через коммутатор фаз подают на вход блока m-фазного мостового транзисторного автономного инвертора напряжения. Усиленный многофазный синусоидальный сигнал с выходов силовых транзисторов подают на обмотки статора электродвигателя. Устройство содержит блок ручного управления режимами работы силового электродвигателя, регулятор уровня напряжения, регулятор тока возбуждения генератора, генератор многофазного синусоидального сигнала с приводным электродвигателем, коммутатор фаз, блок переключения количества рабочих фаз генератора, блок формирования сигналов всех режимов работы силового электродвигателя. Технический результат заключается в повышении момента на валу силового электродвигателя и качества формируемого сигнала. 2 н.п. ф-лы, 1 ил.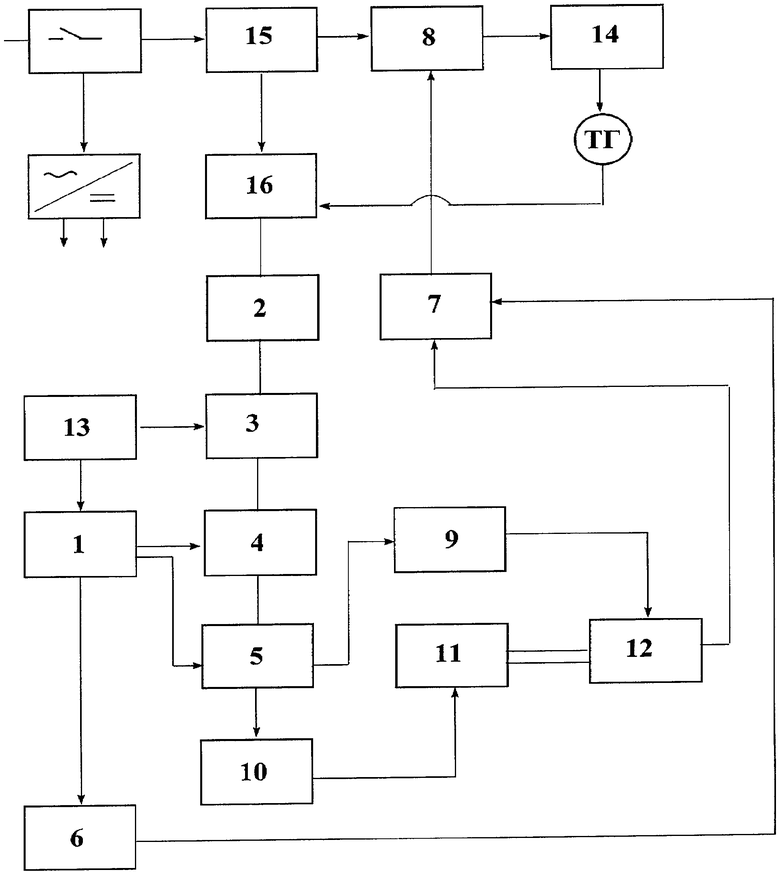
| Клевцов А.В | |||
| Средства оптимизации потребления электроэнергии | |||
| - М.: Солон-Пресс, 2004, с.54-57, рис.3.14 | |||
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1987 |
|
SU1816182A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Способ получения органических адсорбентов | 1937 |
|
SU53916A1 |

