Изобретение относится к способу автоматической калибровки электросиловых цилиндров, которыми оборудован реверсор тяги турбореактивного двигателя (ТРД).
Назначение реверсора тяги при посадке самолета состоит в повышении эффективности его торможения путем перенаправления вперед, по меньшей мере, части развиваемой ТРД тяги. На этом этапе реверсор перекрывает сопло, направляя струю газов двигателя к передней стороне гондолы, в результате чего возникает обратная тяга, которая складывается с торможением колес самолета.
В зависимости от типа реверсора могут использоваться разные средства для перенаправления потока. Тем не менее, во всех случаях конструктивно реверсор включает в себя подвижные капоты, имеющие возможность перемещаться из выпущенного положения, в котором они открывают в гондоле проход для отклоненного потока, в убранное положение, в котором они перекрывают указанный проход. Эти подвижные капоты могут также служить для собственно отклонения потока или лишь для активации иных отклоняющих средств.
Так, например, в каскадных реверсорах тяги подвижные капоты ходят по рельсовым направляющим так, что при выпуске их отводом назад они обнажают каскады отклоняющих лопастей, установленные в теле гондолы. Рычажная система связывает такой подвижный капот с блокирующими створками, которые раскрываются внутрь канала тяги, блокируя при этом выход газов прямого потока. Напротив, в реверсорах тяги створчатого типа подвижные капоты установлены шарнирно с возможностью блокировать поток поворотом и отклонять его, то есть играют активную роль в перенаправлении потока.
В последнее время вместо гидро- или пневомоцилиндров, традиционно используемых для приведения в действие таких подвижных капотов, начали применять электросиловые цилиндры, что избавляет от необходимости в установке отдельной системы для подачи жидкости под давлением, требующей значительного техобслуживания, и позволяет усовершенствовать управление раскрытием и закрытием подвижных капотов.
Подобные системы электропривода раскрыты, в частности, в патентных заявках №№ EP 0843089, FR 2872222 и FR 2872223.
При монтаже подобных средств электропривода возникают некоторые трудности. В ходе монтажа необходимо регулировать электросиловые цилиндры и калибровать их положение с учетом разброса механических характеристик гондолы, а также зазоров и отклонений сборки. Такие операции утомительны, занимают много времени, и их необходимо производить заново после каждого демонтажа и повторной установки, например при проведении техобслуживания реверсора тяги. Поэтому привлекаемые к техобслуживанию рабочие, не обладающие квалификацией заводских сборщиков, тоже должны осваивать операции калибровки электросиловых цилиндров.
В настоящее время при монтаже цилиндров рабочий ограничивается собственно установкой этих цилиндров, не принимая во внимание механические допуски гондолы. Совершенно очевидно, что необходимо задавать ход цилиндров в расчете на наихудший случай. Таким образом, подобная установка недостаточно точна, и эту операцию можно существенно усовершенствовать, чтобы добиться очень точной подгонки хода цилиндров в соответствии с особенностями данной гондолы.
Задача изобретения состоит в устранении вышеупомянутых недостатков. Она решается разработкой способа автоматической калибровки подвижной части гондолы ТРД, содержащей, по меньшей мере, один электросиловой цилиндр, связанный, по меньшей мере, с одним датчиком положения, такой способ отличается тем, что он включает в себя этапы, предусматривающие:
- отвод подвижной части и связанного с ней цилиндра или цилиндров в убранное положение, соответствующее первому положению подвижной части;
- регистрацию в запоминающем устройстве одного или нескольких значений, возвращаемых датчиком положения для цилиндра или цилиндров в таком положении,
- отвод подвижной части и связанного с ней цилиндра или цилиндров в выпущенное положение, соответствующее второму положению подвижной части;
- регистрацию одного или нескольких значений, возвращаемых органом определения положения для цилиндра или цилиндров в таком положении.
Так электронная регистрация выдвинутого и убранного положений электросиловых цилиндров позволяет на основе фактических пределов механического хода задать соответствующие электрические точки останова. То есть в противоположность принятой практике, заключающейся в настройке механического хода цилиндров с запасом на разброс механических характеристик гондолы, здесь предлагается ходы цилиндров на выпуск и убирание подвижных частей выполнять по электронным точкам останова, которые просто и с достаточной точностью находят из фактических механических параметров данной гондолы и данной подвижной части.
Кроме того, электронная регистрация этих положений дает возможность использовать их в контроллере при таком, например, режиме выпуска или убирания, который предусматривает автоматическое снижение скорости подачи цилиндров на подходе к упору.
В соответствии с первым вариантом осуществления, цилиндр или цилиндры приводят в действие вручную.
В соответствии со вторым вариантом осуществления, цилиндр или цилиндры приводят в действие электричеством.
Целесообразно, чтобы убранное и выпущенное положения цилиндров выявлялись автоматически путем обнаружения пределов механического хода.
В соответствии с первым вариантом осуществления, распознавание пределов механического хода производят измерением изменения тока питания электродвигателя цилиндра или цилиндров.
В соответствии со вторым вариантом осуществления, распознавание пределов хода производят измерением скорости выпуска или убирания цилиндров.
Предпочтительно скорость выпуска или убирания получать дифференцированием величины, возвращаемой датчиком положения.
Разумеется, можно применять и любой иной метод автоматического распознавания пределов хода с использованием какого-либо измеряемого параметра.
Предпочтительно в качестве датчика использовать резольвер (СКВТ). Совершенно очевидно, однако, что можно применить и любые иные известные специалистам датчики положения - как, например, оптические кодеры, потенциометры и другие.
Целесообразно корректировать зарегистрированные величины для убранного и выпущенного положений на некоторый предел погрешности. Дело в том, что, поскольку измеряют положение тогда, когда цилиндр доходит до пределов хода, соответствующих выпущенному или убранному положению, целесообразно задать электронную точку останова несколько недоходя до предела механического хода, чтобы ослабить и даже полностью исключить удар об упоры - который со временем может привести к снижению прочности механических деталей - и при этом обеспечить оптимальный выпуск или убирание. Выбор необходимого предела погрешности не представляет для специалиста особой трудности.
Настоящее изобретение относится также к реверсору тяги, содержащему, по меньшей мере, один подвижный капот с возможностью перемещения под действием, по меньшей мере, одного электромеханического органа типа электросилового цилиндра, отличающийся тем, что он содержит интерфейс контроля и настройки, обеспечивающий реализацию заявляемого способа. Целесообразно, чтобы интерфейс управления был присоединен к блоку управления ТРД и чтобы процедуру автоматической калибровки согласно заявляемому способу можно было активировать из кабины пилота.
Сущность изобретения станет более понятной из нижеследующего подробного описания со ссылками на прилагаемые чертежи.
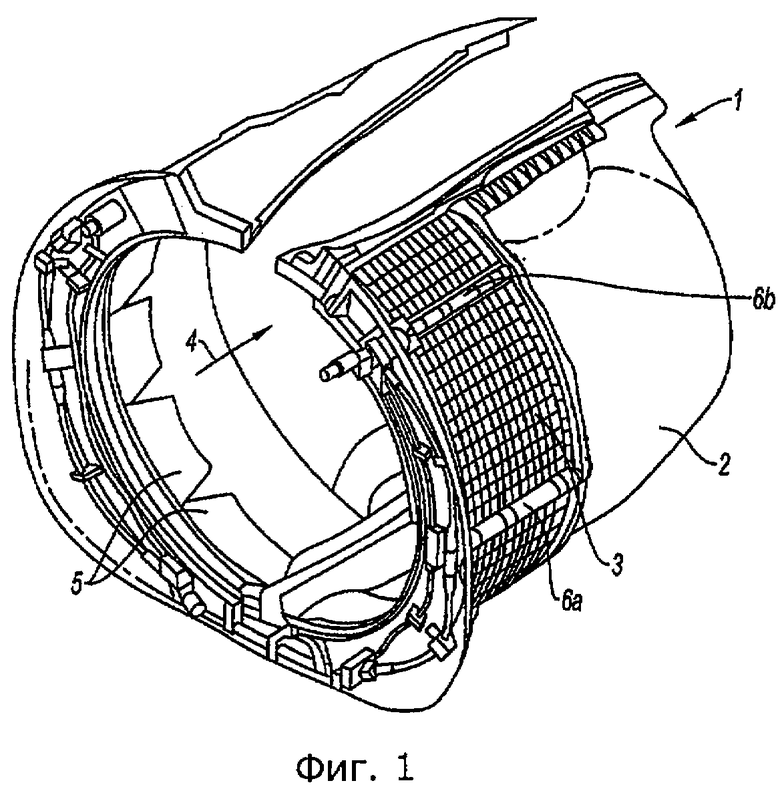
Фиг.1 показывает в аксонометрии часть гондолы с каскадным реверсором тяги.
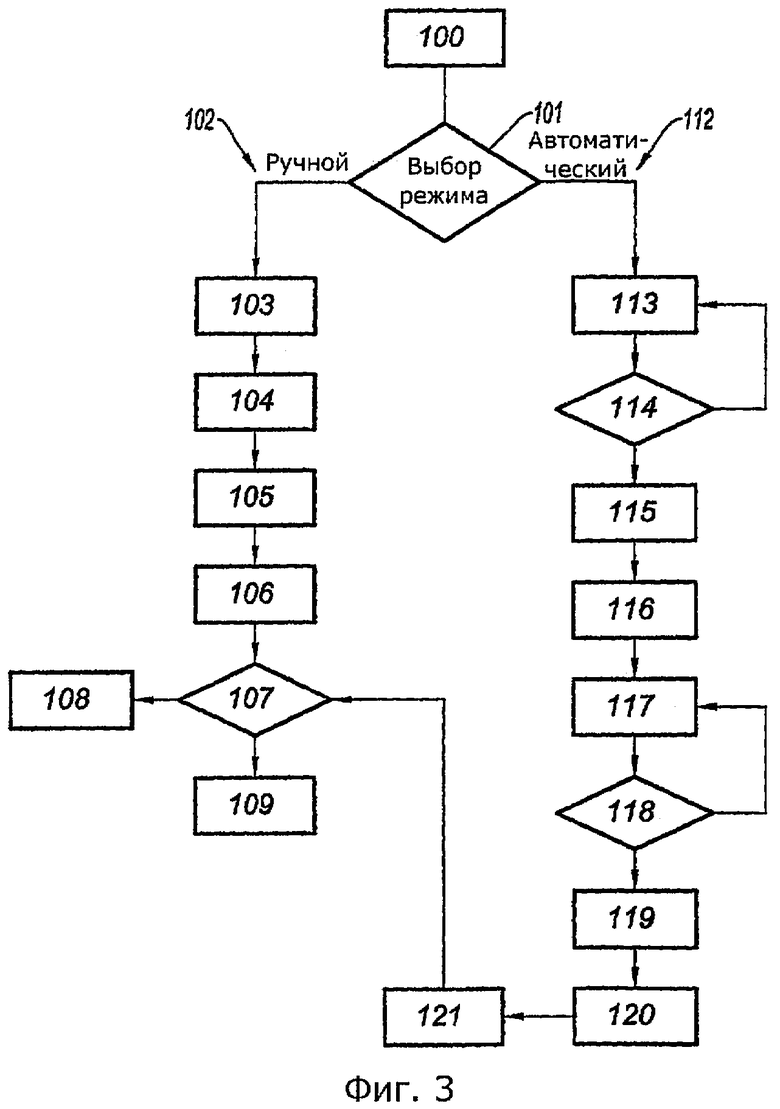
Фиг.2 схематически показывает подвижные капоты и системы их привода.
Фиг.3 представляет собой блок-схему заявляемого способа калибровки системы привода реверсора тяги.
Перед тем как приступать к детальному рассмотрению одного из вариантов осуществления изобретения, важно уточнить, что оно не ограничивается лишь одним конкретным типом подвижной части. Хотя изобретение описано здесь на примере каскадного реверсора тяги, его можно также реализовать применительно к реверсорам иного типа, в частности створчатым, или же к прочим разнообразным подвижным капотам, которыми оборудована гондола ТРД.
На фиг.1 схематически показана часть гондолы с реверсором 1 тяги. ТРД не показан. Конструкция реверсора 1 тяги содержит два полукруглых подвижных капота 2, установленных с возможностью обнажать сдвигом решетки 3 отклоняющих лопастей, помещенные между подвижными капотами 2 и каналом воздушного потока 4, который требуется отклонять. Предусмотрены также блокирующие створки 5, размещенные внутри конструкции с возможностью переходить поворотом из положения, в котором они не препятствуют циркуляции воздушного потока 4, в положение, в котором они блокируют циркуляцию. Для координации сдвига подвижных капотов 2 с переводом створок 5 в блокирующее положение, последние механически связаны шарнирами с подвижными капотами 2 и системой тяг (не показаны) - с неподвижной конструкцией.
Подвижные капоты 2 перемещаются вдоль наружной поверхности конструкции группой цилиндров 6а, 6b, установленных на лобовой раме, внутри которой помещены электродвигатель 7 и гибкие передаточные валы 8а, 8b, соединенные, соответственно, с цилиндрами 6а и 6b и приводящие эти цилиндры в действие.
На фиг.2 отдельно показана система привода подвижных капотов 2. Подвижные капоты 2 установлены с возможностью поступательного движения под действием троек цилиндров 6а, 6b, содержащих центральный цилиндр 6а и по два дополнительных цилиндра 6b, приводимых в действие единственным электродвигателем 7, с которым соединен интерфейс управления 9. Вырабатываемая электродвигателем 7 мощность сначала раздается по двум гибким передаточным валам 8а на центральные цилиндры 6а, а затем - по гибким передаточным валам 8b на дополнительные цилиндры 6b.
Далее, каждый из цилиндров 6а, 6b оборудован датчиком положения, который содержит револьвер и выдает, по меньшей мере, одну непрерывную величину, позволяющую определить положение штока соответствующего цилиндра 6а или 6b. Строго говоря, резольвер представляет собой датчик углового положения. Поэтому к нему следует добавить счетчик оборотов, что позволит измерять абсолютное положение штока цилиндра 6а, 6b. Таким образом, датчик положения возвращает две величины: число оборотов, совершенных приводным штоком, и его угловое положение. По этим двум величинам можно точно определить длину, на которую выдвинут шток цилиндра 6а, 6b.
На фиг.3 показаны этапы заявляемого способа калибровки цилиндров.
Процедура калибровки начинается с команды 100, по которой подают электропитание на электронные приборы, в частности на датчики положения цилиндров 6а, 6b. Эту команду можно подавать из кабины пилота или с электронного контроллера гондолы.
Затем следует контрольный этап 101, на котором определяется, какой метод калибровки выбрал оператор - ручной или автоматический.
В случае выбора 102 ручной калибровки оператор на этапе 103 вручную закрывает реверсор тяги. При этом он устанавливает цилиндры 6а, 6b в убранное положение.
Затем, на этапе 104, оператор посылает в контроллер команду на регистрацию выходных величин на резольверах каждого из цилиндров 6а, 6b. Эти значения задают электронную точку останова при убирании.
Далее, на этапе 105, оператор вручную устанавливает реверсор тяги в выпущенное положение, при этом он устанавливает в выпущенное положение цилиндры 6а, 6b.
После этого, на этапе 106, оператор посылает в контроллер команду на регистрацию выходных величин на резольверах каждого из цилиндров 6а, 6b. Эти значения задают электронную точку останова при выпуске.
Как только зарегистрированы величины для выпущенного и убранного положений, контроллер приступает на этапе 107 к контролю записи указанных величин в память. Опционально также проверяется, что сохраненные величины укладываются в ожидаемые диапазоны, после чего, при необходимости, контроллер возвращает сообщение об ошибке 108.
Затем, на этапе 109, производят коррекцию электронных точек останова при убирании и выдвижении на предел погрешности, имея целью компенсировать приборные погрешности резольверов, и то обстоятельство, что подвижные капоты для измерений были приведены в положения пределов механического хода.
То есть величины положений, соответствующие останову при убирании, несколько увеличивают, а значения положений, соответствующие останову при выдвижении - несколько уменьшают.
В случае же выбора 112 автоматической калибровки в гондолу подают ток, достаточный для работы электропривода цилиндров 6а, 6b, а не только для питания электронных приборов.
На этапе 113 на цилиндры 6а, 6b подают ток на убирание. В контрольном цикле 114 непрерывно проверяют, достигнут ли предел механического хода, соответствующий закрытию реверсора тяги, или же необходимо продолжать работу цилиндров 6а, 6b.
Предел механического хода можно распознать, например, по скорости электродвигателя 7, дифференцированием выходных величин одного или нескольких резольверов, либо по напряжению питания на двигателе.
По достижении предела механического хода при убирании электродвигатель 7 отключают по команде 115. Затем, на этапе 116, контроллер регистрирует выходные величины на резольверах каждого из цилиндров 6а, 6b, как описано выше.
После этого, на этапе 117, электродвигатель 7 реверсируют для выпуска цилиндров 6а, 6b.
В контрольном цикле 118 непрерывно проверяют, достигнут ли предел механического хода при выпуске или же необходимо продолжать работу цилиндров 6а, 6b.
По достижении предела механического хода при выдвижении электродвигатель 7 отключают по команде 119. Затем, на этапе 120, контроллер регистрирует выходные величины на резольверах каждого из цилиндров 6а, 6b, как описано выше.
Эта часть процедуры завершается на этапе 121 возвратом реверсора тяги и цилиндров 6а, 6b в убранное положение.
Как только зарегистрированы величины для выдвинутого и убранного положений, контроллер приступает на этапе 107 к контролю записи указанных величин в память.
Затем, на этапе 108, производят коррекцию электронных точек останова при убирании и выдвижении на предел погрешности, имея целью компенсировать приборные погрешности резольверов, и то обстоятельство, что подвижные капоты для измерений были приведены в положения предела механического хода.
Хотя выше изобретение описывается применительно к отдельным примерам его осуществления, должно быть совершенно ясно, что оно ни в коем случае не ограничивается ими, но охватывает всевозможные технические эквиваленты рассмотренных здесь средств, а также их различные комбинации, не изменяющие существо изобретения.
Изобретение относится к способу автоматической калибровки электросиловых цилиндров привода подвижной части гондолы ТРД, связанных, по меньшей мере, с одним датчиком положения, причем способ отличается тем, что содержит этапы, предусматривающие: отвод подвижной части и связанного с ней цилиндра в убранное положение, соответствующее первому положению подвижной части, регистрацию в запоминающем устройстве одной или нескольких величин, возвращаемых датчиком положения в таком положении, отвод подвижной части и связанного с ней цилиндра в выпущенное положение, соответствующее второму положению подвижной части, регистрацию в запоминающем устройстве одной или нескольких величин, возвращаемых датчиком положения в таком положении. Изобретение также относится к реверсу тяги. Такие способ и реверс позволят обеспечить точную подгонку хода цилиндров в соответствии с особенностями данной гондолы. 2 н. и 9 з.п. ф-лы, 3 ил.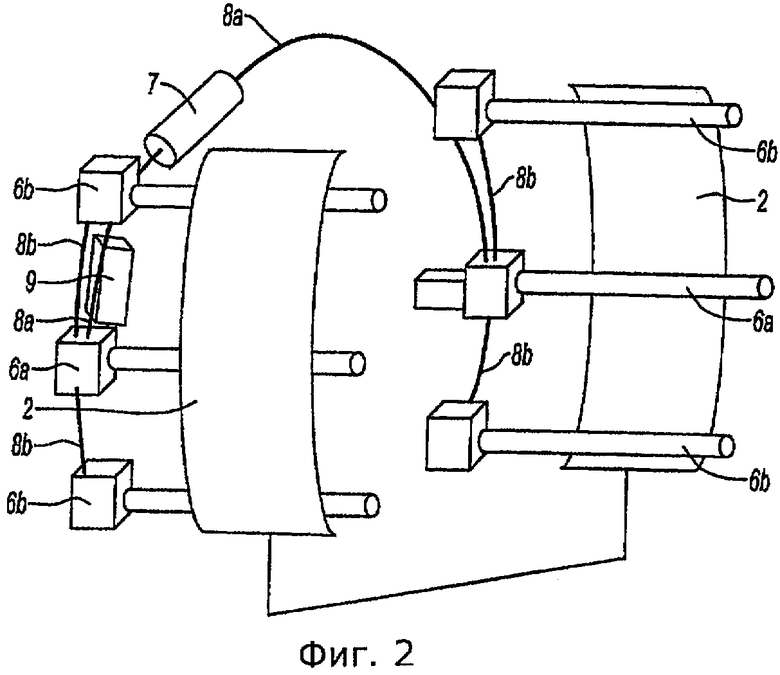
1. Способ автоматической калибровки подвижного капота (2) реверсора тяги гондолы (1) турбореактивного двигателя, причем указанный подвижный капот (2) содержит, по меньшей мере, один электросиловой цилиндр (6а, 6b), связанный, по меньшей мере, с одним датчиком положения, причем способ отличается тем, что содержит этапы, предусматривающие:
- отвод (103, 113) подвижного капота и связанного с ним цилиндра или цилиндров в убранное положение, соответствующее первому положению подвижного капота,
- регистрацию (104, 116) в запоминающем устройстве одной или нескольких величин, возвращаемых датчиком или датчиками положения в указанном убранном положении,
- отвод (105, 117) подвижного капота и связанного с ним цилиндра или цилиндров в выпущенное положение, соответствующее второму положению подвижного капота,
- регистрацию (106, 120) в запоминающем устройстве одной или нескольких величин, возвращаемых датчиком положения в указанном выпущенном положении.
2. Способ по п.1, отличающийся тем, что цилиндр или цилиндры (6а, 6b) приводят в действие (103, 105) вручную.
3. Способ по п.1, отличающийся тем, что цилиндр или цилиндры (6а, 6b) приводят в действие (113, 117) электрически.
4. Способ по п.3, отличающийся тем, что убранное и выпущенное положения цилиндров (6а, 6b) определяют автоматически (114, 118) распознаванием пределов механического хода.
5. Способ по п.4, отличающийся тем, что распознавание (114, 118) пределов механического хода производят измерением изменения тока на электродвигателе (7) привода цилиндра или цилиндров (6a, 6b).
6. Способ по п.4, отличающийся тем, что распознавание (114, 118) пределов хода производят измерением скорости выпуска или убирания цилиндров (6a, 6b).
7. Способ по п.6, отличающийся тем, что скорость выпуска или убирания определяют дифференцированием выходной величины датчика положения.
8. Способ по любому из пп.1-7, отличающийся тем, что в качестве датчика положения используют резольвер (синусно-косинусный вращающийся трансформатор).
9. Способ по любому из пп.1-7, отличающийся тем, что зарегистрированные значения убранного и выпущенного положений корректируют (108) с учетом некоторого предела погрешности.
10. Реверсор тяги, содержащий, по меньшей мере, один подвижный капот (2), установленный с возможностью перемещения под действием, по меньшей мере, одного электромеханического органа типа электросилового цилиндра (6a, 6b), отличающийся тем, что содержит интерфейс (9) контроля и настройки, обеспечивающий реализацию способа по любому из пп.1-9.
11. Реверсор тяги по п.10, отличающийся тем, что интерфейс (9) соединен с блоком управления ТРД, а процедура автоматической калибровки может быть активирована из кабины пилота.
| WO 00/05497 A, 03.02.2000 | |||
| FR 2872222 A1, 30.12.2005 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |
| SU 1596638 A1, 20.06.1996 | |||
| RU 200311382 A, 10.04.2005 | |||
| RU 2003131383 A, 10.04.2005. | |||

