Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), с использованием в качестве первичных источников энергии солнечных батарей (СБ), а в качестве накопителей энергии - аккумуляторных батарей (АБ).
Известен способ управления автономной системой электроснабжения (патент РФ №2059988, H02J 7/35), содержащей солнечную батарею (СБ), стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, «n» аккумуляторных батарей и по «n» (по числу АБ) зарядных и разрядных устройств, а также для каждой АБ - устройства контроля степени заряженности.
В известной СЭС осуществляется непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение СБ) и выходного (напряжения нагрузки) напряжений СЭС. При этом зарядные устройства обеспечивают заряд АБ, а стабилизатор напряжения и разрядное устройство обеспечивают питание потребителей.
Цепи непрерывного управления (обратной связи) зарядного устройства подключены к шине СБ и шине нагрузки, а цепи непрерывного управления стабилизатора напряжения и разрядного устройства подключены к шине нагрузки.
В зависимости от степени заряженности (или разряженности) АБ производится блокировка или разрешение работы зарядного устройства и разрядного устройства.
Такое управление обеспечивает длительную автономную работу СЭС. Однако известный способ не обеспечивает защиту от отрицательного влияния гироскопических устройств системы ориентации КА на качество выходного напряжения СЭС. Отрицательное влияние гироскопических устройств проявляется в том, что при их торможении рекуперируется мощность на шины нагрузки СЭС, и, если эта мощность превышает текущую мощность нагрузки, на шинах нагрузки может возникнуть нерасчетное повышенное напряжение.
Следует отметить, что при использовании шунтового стабилизатора напряжения, когда шины солнечной батареи и нагрузки общие (без учета выходного фильтра), вся избыточная мощность будет сброшена на балластное сопротивление и возникновение перенапряжения на шинах нагрузки исключено, а вот при работе сериесного или короткозамкнутого стабилизатора напряжения возникновение перенапряжений на шинах нагрузки реально.
Известен способ управления автономной системой электроснабжения (патент РФ №2168828, H02J 7/36), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батарей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в управлении стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжения системы, контроле степени заряженности и разряженности аккумуляторных батарей, блокировки работы соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этой блокировки при достижении определенного уровня разряженности данной аккумуляторной батареи, блокировки работы соответствующего разрядного устройства при достижении предельного уровня разряженности данной аккумуляторной батареи, снятии этой блокировки при достижении определенного уровня заряженности данной аккумуляторной батареи.
Этот способ принят за прототип заявляемому изобретению.
В то же время известный способ, как и предыдущий, также не обеспечивает защиту от отрицательного влияния работы гироскопических устройств системы ориентации КА на качество выходного напряжения СЭС.
Задачей заявляемого изобретения является повышение качества выходного напряжения СЭС в процессе эксплуатации КА.
Поставленная задача решается тем, что при управлении автономной системой электроснабжения космического аппарата, содержащей солнечную батарею, подключенную к нагрузке через стабилизатор напряжения сериесного или короткозамкнутого типа, причем нагрузка в своем составе содержит сеансную и дежурную составляющие, в том числе систему ориентации с управляющими гироскопическими устройствами и бортовую ЭВМ, «n» аккумуляторных батарей, связанных однополярными шинами с общей шиной солнечной батареи и нагрузки, а шинами противоположной полярности - с соответствующими «n» зарядными и «n» разрядными устройствами, имеющими обратные связи по напряжению нагрузки, заключающийся в стабилизации выходного напряжения автономной системой электроснабжения, путем управления стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения, управление работой управляющих гироскопических устройств реализуют исходя из условия непревышения их мощности рекуперации Pрек текущей мощности нагрузки Pн: Pрек<Pн. Кроме того, при применении короткозамкнутого стабилизатора напряжения дополнительно контролируют заранее установленный минимальный уровень измеряемого тока нагрузки и при снижении тока нагрузки ниже заранее установленного минимального уровня снимают блокировку, при ее наличии, на работу зарядных устройств на время до последующего восстановления измеряемого тока нагрузки выше установленного минимального уровня или включение режима торможения управляющих гироскопических устройств сопровождают снятием блокировки, при ее наличии, на работу зарядных устройств с последующим восстановлением исходного состояния по завершении режима торможения.
Действительно, токи рекуперации имеют направление протекания, противоположное току нагрузки, и соответственно уменьшают контролируемую величину тока нагрузки, при этом если мощность рекуперации превысит текущую мощность нагрузки, то развязывающий силовой диод короткозамкнутого стабилизатора напряжения (или силовой транзистор сериесного стабилизатора) будет заперт более высоким напряжением нагрузки, ограниченным сверху только вольт-амперной характеристикой источника рекуперируемой мощности (гироскопического устройства). Появление на нагрузке несанкционированного повышенного напряжения может привести к сбоям в работе бортовой аппаратуры КА и к возникновению неисправностей.
Для короткозамкнутого стабилизатора напряжения, в случае работы зарядного устройства, резерв мощности для компенсации мощности рекуперации увеличивается на величину мощности, потребляемой зарядным устройством на заряд аккумуляторной батареи. При этом если зарядное устройство рассчитано на заряд всей избыточной мощностью солнечной батареи, то указанный резерв практически не ограничен, иначе он ограничен максимальным зарядным током, что в основном вполне достаточно для решения задачи по компенсации мощности рекуперации. Однако зарядное устройство в определенные моменты может быть отключено: при полном заряде аккумуляторной батареи или при отсутствии мощности солнечной батареи (теневой участок орбиты), когда нагрузка питается от аккумуляторной батареи через разрядное устройство. Обе перечисленные причины блокировки работы зарядного устройства (если управление зарядным устройством реализовано через бортовую ЭВМ) могут быть при необходимости сняты простыми программными средствами. При этом мощность рекуперации, превышающая текущую мощность нагрузки, будет направлена на заряд аккумуляторной батареи и напряжение на нагрузке останется стабильным.
Мощность рекуперации гироскопических устройств при эксплуатации КА составляет в среднем от 20 Вт до 200 Вт. При этом длительность рекуперации (длительность торможения гироскопических устройств при штатной эксплуатации КА) не превышает 2 минут. В пересчете на 27 В (наиболее распространенный номинал выходного напряжения СЭС КА) это составит от 1,85 А до 7,4 А. Если принять минимальную дежурную нагрузку КА 5 А, то оставшийся для заряда аккумуляторной батареи ток 2,4 А (максимальная величина) за время 2 минуты соответствует энергоемкости 2,4·1/30=0,08 А·ч, а с учетом того, что зарядное напряжение аккумуляторной батареи более чем в полтора раза выше выходного напряжения СЭС КА - порядка 0,05 А·ч. Причем это без учета КПД зарядного устройства и самой аккумуляторной батареи по зарядному току, что еще более снизит указанную энергоемкость, а при использовании в СЭС нескольких аккумуляторных батарей распределится между ними.
Учитывая, что величина энергоемкости рекуперации, которая может быть использована на заряд аккумуляторных батарей, незначительна, возможность их перезаряда этой энергоемкостью исключена, тем более, что ограничение штатного заряда аккумуляторной батареи всегда предусматривает определенный технологический запас.
На фиг.1 приведена функциональная схема автономной системы электроснабжения КА для реализации заявляемого способа (в рассматриваемом примере используется короткозамкнутый стабилизатор напряжения и, для простоты, описана СЭС с одной аккумуляторной батареей).
Автономная система электроснабжения КА содержит солнечную батарею 1, подключенную к нагрузке 2, через короткозамкнутый стабилизатор напряжения 3 (развязывающий силовой диод 3-1) и выходной фильтр 4, аккумуляторную батарею 6, подключенную через зарядное устройство 5 к выходу короткозамкнутого стабилизатора напряжения 3, а через разрядное устройство 7 к входу выходного фильтра 4.
При этом нагрузка 2 в своем составе содержит бортовую ЭВМ, систему телеметрии и командно-измерительную радиолинию (на схеме не показано). Кроме того, в цепи питания нагрузки 2 установлен токовый измерительный шунт 2-1 для измерения потребляемого тока.
Зарядное устройство 5 состоит из регулирующего ключа 5-4, управляемого схемой управления 5-3, вольтодобавочного узла, выполненного на трансформаторе 5-5, транзисторах 5-1 и выпрямителя на диодах 5-2.
Разрядное устройство 7 состоит из регулирующего ключа 7-2, управляемого схемой управления 7-1.
Короткозамкнутый стабилизатор напряжения 3 состоит из развязывающего силового диода 3-1, регулирующего ключа 3-2, управляемого схемой управления 3-3.
Схемы управления: 5-3 зарядного устройства 5, 7-1 - разрядного устройства 7, 3-3 - короткозамкнутого стабилизатора напряжения 3, выполнены в виде широтно-импульсных модуляторов, входом подключенных к шинам стабилизируемого напряжения (нагрузки 2).
Устройство работает следующим образом. В процессе эксплуатации аккумуляторная батарея 6 работает в основном в режиме хранения с дозарядами от солнечной батареи 1 через зарядные устройства 5. При этом зарядное устройство 5 работает в режиме заряда всей избыточной мощностью солнечной батареи 1 с ограничением по предельному току. При полном заряде аккумуляторной батареи 6 работа зарядного устройства запрещается.
Такой режим работы позволяет содержать аккумуляторную батарею 6 в постоянной готовности на случай аварийных ситуаций (потеря ориентации ИСЗ на Солнце) или на прохождение штатных теневых участков орбиты.
Питание нагрузки 2 осуществляется при этом от солнечной батареи 1 через стабилизатор напряжения 3.
При прохождении теневых участков орбиты либо при нарушении ориентации нагрузка 2 питается от аккумуляторной батареи 6 через разрядное устройство 7.
В процессе эксплуатации КА проводят работы с системой ориентации по корректировке пространственного положения КА, что связано, в том числе, с торможением гироскопических устройств. При этом обеспечивают, по результатам анализа информации о величине тока нагрузки, условие непревышения мощности (тока) рекуперации текущей мощности (току) нагрузки. Измерение тока нагрузки проводят посредством токового измерительного шунта 2-1. При этом появляющийся ток рекуперации имеет противоположное току нагрузки направление и снижает его измеряемое значение.
В случае снижения измеряемого тока нагрузки ниже установленного минимального уровня по заранее заложенной в бортовую ЭВМ программе формируется снятие блокировки на работу зарядного устройства 5 (при наличии таковой в текущем состоянии работы зарядного устройства). Снятие блокировки на работу зарядного устройства может быть проведено также по программе или по команде с Земли через командно-измерительную радиолинию при выполнении работ, связанных с торможением гироскопических устройств. После повышения измеряемого тока нагрузки до величины, превышающей минимальное его значение, блокировку работы зарядного устройства восстанавливают (если в предшествующем состоянии она имела место). Более простой вариант заключается в том, что включение режима торможения гироскопических устройств сопровождают снятием блокировки, при ее наличии, на работу зарядных устройств с последующим восстановлением исходного состояния по завершении режима торможения.
Таким образом, заявляемый способ управления автономной системой электроснабжения космического аппарата позволяет устранить отрицательное влияние рекуперации в режиме торможения гироскопических устройств системы ориентации КА на выходное напряжение СЭС, что повышает качество выходного напряжения СЭС в процессе эксплуатации КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2604206C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2470440C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2577632C1 |
| Способ управления автономной системой электроснабжения космического аппарата | 2018 |
|
RU2706762C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2541512C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2535301C2 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1998 |
|
RU2156534C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2634473C9 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2574922C2 |
Изобретение относится к электротехнике, к системам электроснабжения (СЭС) космических аппаратов (КА), с использованием в качестве первичных источников энергии солнечных батарей (СБ), а в качестве накопителей энергии - аккумуляторных батарей (АБ). Способ управления автономной системой электроснабжения космического аппарата, содержащей солнечную батарею, подключенную к нагрузке через стабилизатор напряжения сериесного или короткозамкнутого типа, причем нагрузка в своем составе содержит сеансную и дежурную составляющие, в том числе систему ориентации с управляющими гироскопическими устройствами и бортовую ЭВМ, «n» аккумуляторных батарей, связанных однополярными шинами с общей шиной солнечной батареей и нагрузки, а шинами противоположной полярности - с соответствующими «n» зарядными и «n» разрядными устройствами, имеющими обратные связи по напряжению нагрузки, заключающийся в стабилизации выходного напряжения автономной системой электроснабжения, путем управления стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения. Технический результат - повышение качества выходного напряжения - достигается тем, что управление работой управляющих гироскопических устройств реализуют исходя из условия непревышения их мощности рекуперации Pрек текущей мощности нагрузки Pн: Pрек<pн. 2 з.п. ф-лы, 1 ил.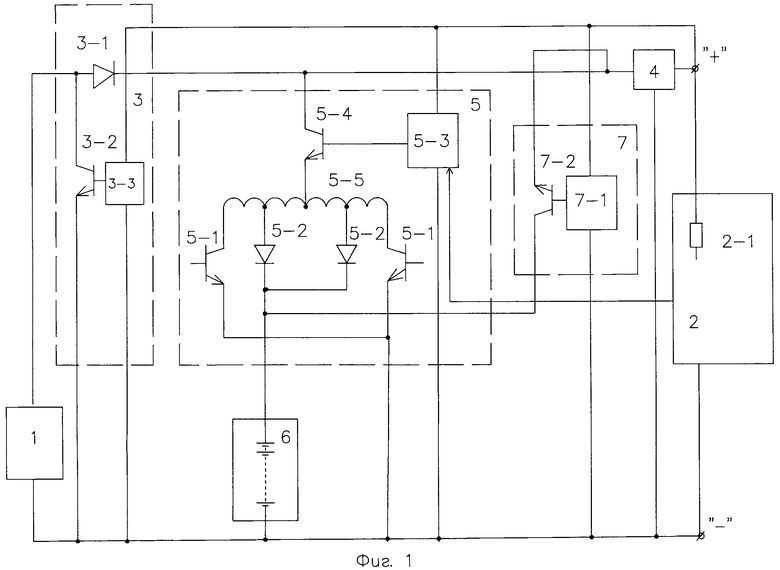
1. Способ управления автономной системой электроснабжения космического аппарата, содержащей солнечную батарею, подключенную к нагрузке через стабилизатор напряжения сериесного или короткозамкнутого типа, причем нагрузка в своем составе содержит сеансную и дежурную составляющие, в том числе систему ориентации с управляющими гироскопическими устройствами и бортовую ЭВМ, n аккумуляторных батарей, связанных однополярными шинами с общей шиной солнечной батареи и нагрузки, а шинами противоположной полярности - с соответствующими n зарядными и n разрядными устройствами, имеющими обратные связи по напряжению нагрузки, заключающийся в стабилизации выходного напряжения автономной системой электроснабжения путем управления стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжений системы электроснабжения, отличающийся тем, что управление работой управляющих гироскопических устройств реализуют исходя из условия непревышения их мощности рекуперации Pрек текущей мощности нагрузки Pн: Pрек<Pн.
2. Способ управления автономной системой электроснабжения космического аппарата по п.1, отличающийся тем, что при применении короткозамкнутого стабилизатора напряжения дополнительно контролируют заранее установленный минимальный уровень измеряемого тока нагрузки и при снижении тока нагрузки ниже заранее установленного минимального уровня снимают блокировку, при ее наличии на работу зарядных устройств на время до последующего восстановления измеряемого тока нагрузки выше установленного минимального уровня.
3. Способ управления автономной системой электроснабжения космического аппарата по п.1, отличающийся тем, что при применении короткозамкнутого стабилизатора напряжения включение режима торможения управляющих гироскопических устройств сопровождают снятием блокировки, при ее наличии на работу зарядных устройств с последующим восстановлением исходного состояния по завершении режима торможения.
| RU 2059988 C1, 10.05.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| Устройство для кантования слитков | 1982 |
|
SU1133213A1 |

