Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), с использованием в качестве первичных источников энергии солнечных батарей (СБ), а в качестве накопителей энергии - аккумуляторных батарей (АБ).
Известен способ управления автономной системой электроснабжения (патент РФ №2059988, H02J 7/35), содержащей солнечную батарею (СБ), стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, «n» аккумуляторных батарей (n≥1) и по «n» (по числу АБ) зарядных и разрядных устройств, а также для каждой АБ - устройства контроля степени заряженности.
В известной СЭС осуществляется непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение СБ) и выходного напряжений СЭС. При этом зарядные устройства обеспечивают заряд АБ, а стабилизатор напряжения и разрядное устройство обеспечивают питание потребителей.
Цепи непрерывного управления (обратной связи) зарядного устройства подключены к шине СБ и шине нагрузки, а цепи непрерывного управления стабилизатора напряжения и разрядного устройства подключены к шине нагрузки.
В зависимости от степени заряженности или разряженности АБ производится запрет или разрешение работы зарядного устройства и разрядного устройства.
Такое управление обеспечивает длительную автономную работу СЭС. Однако оно не обеспечивает сохранение работоспособности СЭС при нештатных или аварийных ситуациях на КА. В случае нештатного, незапланированного нарушения ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭС. Если потеря ориентации будет достаточно длительной, может произойти полный разряд всех АБ. Питание бортовых потребителей после этого прекратится.
Известен способ управления автономной системой электроснабжения (патент РФ №2168828, H01J 7/36), содержащей солнечную батарею и «n» аккумуляторных батарей, где n≥1, стабилизатор напряжения, включенный между солнечной батарей и нагрузкой и по n зарядных и разрядных устройств, заключающийся в управлении стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжения системы, контроле степени заряженности и разряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня разряженности данной аккумуляторной батареи, запрете на работу соответствующего разрядного устройства при достижении предельного уровня разряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, при этом, в случае потери ориентации солнечных батарей на Солнце, аварийном разряде аккумуляторных батарей и отключении части разрядных устройств, когда мощности оставшихся в работе разрядных устройств недостаточно для питания нагрузки, запрещают работу всех разрядных устройств и стабилизатора напряжения, а также прекращают управление разрядными устройствами по сигналам об уровне заряженности, после этого при опасности переполюсовки аккумуляторов какой-либо аккумуляторной батареи к ней подключают устройство защиты аккумуляторов от переполюсовки, после восстановления ориентации солнечных батарей на Солнце сначала производят заряд аккумуляторных батарей до некоторого значения емкости, а затем разрешают работу стабилизатора напряжения и возобновляют управление разрядными устройствами по сигналам об уровне заряженности, устройство защиты аккумуляторов от переполюсовки отключают после начала заряда аккумуляторной батареи.
Этот способ принят за прототип заявляемому изобретению.
Известный способ решает задачу предотвращения выхода из строя аккумуляторов АБ, восстановления нормального функционирования СЭС после нештатной или аварийной ситуации. Однако он не раскрывает способы управления зарядом и контроля состояния заряженности (разряженности) аккумуляторных батарей, что снижает надежность эксплуатации.
Задачей заявляемого изобретения является повышение надежности эксплуатации при эффективном использовании аккумуляторных батарей путем исключения возможности перезаряда или переразряда аккумуляторных батарей из-за возможных аномалий в системе контроля их состояния и управления их работой.
Поставленная задача решается тем, что при управлении автономной системой электроснабжения космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой и «n» зарядных и разрядных устройств, заключающийся в контроле степени заряженности (разряженности) аккумуляторных батарей, управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения и уровня заряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при снижении уровня заряженности до определенного значения, запрете на работу соответствующего разрядного устройства при достижении минимального уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, при этом для контроля состояния и управления работой космического аппарата используют в составе космического аппарата бортовую ЭВМ и командно-измерительную радиолинию, контроль степени заряженности аккумуляторных батарей и управление работой зарядными устройствами проводят с использованием двух независимых контуров: аппаратного и программного, причем программный контур контроля и управления связан с бортовой ЭВМ и является основным, а аппаратный контур контроля и управления используют в качестве резервного контура, при этом при работе программного контура, не реже периода τ=ΔСсущ/Iзар, где
τ - время, час;
ΔСсущ - максимальное существенное значение емкости перезаряда для используемой аккумуляторной батареи, А*час;
Iзар - ток заряда аккумуляторной батареи, А,
контролируют параметр факта работы бортовой ЭВМ и при его отсутствии проводят автоматическое переключение с программного на аппаратный контур контроля и управления работой зарядными устройствами, а обратное переключение проводят после восстановления параметра факта работы бортовой ЭВМ по радиокоманде через командно-измерительную радиолинию с Земли.
Действительно, использование двух независимых контуров: аппаратного и программного, когда программный контур контроля и управления, связанный с бортовой ЭВМ, является основным, а аппаратный контур контроля и управления используют в качестве резервного контура, позволяет повысить надежность эксплуатации при эффективном использовании аккумуляторных батарей путем исключения возможности перезаряда или переразряда аккумуляторных батарей из-за возможных аномалий в системе контроля их состояния и управления их работой.
Следует уточнить, что понятия степени «заряженности» и «разряженности» аккумуляторной батареи отличаются друг от друга точками отсчета текущей емкости аккумуляторной батареи (от состояния полного разряда или от состояния полного заряда соответственно).
Эффективное использование аккумуляторных батарей обеспечивается гибкостью программного контура, позволяющего в процессе эксплуатации корректировать уровень уставки, характеризующей уровень заряженности аккумуляторной батареи, устраняя тем самым отрицательное влияние ресурсных изменений. Например, для никель-водородных аккумуляторных батарей характерно накопление в процессе эксплуатации балластного водорода, что требует периодического повышения уровня уставок, характеризующих уровень заряженности аккумуляторной батареи для сохранения ее рабочих емкостных характеристик.
В то же время надежность программного контура ниже аппаратного, так как он целиком зависит от работы бортовой ЭВМ, требующей плановых или нештатных профилактических работ.
Аппаратный контур (обеспечивающий меньшую эффективность использования аккумуляторной батареи) является автономным, что обеспечивает более высокую его надежность и позволяет использовать его на время устранения возможных профилактических работ с программным контуром.
Для обеспечения оперативного переключения с программного контура на аппаратный контролируют параметр факта работы бортовой ЭВМ и при его потере проводят автоматическое переключение с программного на аппаратный контур контроля и управления работой зарядными устройствами. Например, можно использовать такой прием, когда схема переключения постоянно находится во «взведенном» состоянии и срабатывает при прекращении поступления регулярных меток от бортовой ЭВМ. При этом период поступления регулярных меток должен быть не более расчетной величины τ=ΔСсущ/Iзар, где
τ - время, час;
ΔСсущ - максимальное существенное значение емкости перезаряда для используемой аккумуляторной батареи, А*час;
Iзар - ток заряда аккумуляторной батареи, А.
Так, если существенное значение емкости перезаряда принять равным 1 А*час при токе заряда 5 А, то период поступления меток не должен будет превышать 0,2 часа.
Обратное переключение на программный контур проводят по радиокомандам с Земли после восстановления параметра факта работы бортовой ЭВМ (после анализа телеметрических данных и проведения профилактических работ).
На фиг. 1 приведена функциональная схема автономной системы электроснабжения КА для реализации заявляемого способа.
Автономная система электроснабжения КА содержит солнечную батарею 1, подключенную к нагрузке 2 через стабилизатор напряжения 3, аккумуляторные батареи 41-4n, подключенные через зарядные устройства 51-5n к солнечной батарее 1, а через разрядные устройства 61-6n к входу выходного фильтра стабилизатора напряжения 3.
При этом нагрузка 2 в своем составе содержит, кроме всего прочего, бортовую ЭВМ 2-1, систему телеметрии и командно-измерительную радиолинию (последние на схеме не показаны).
Параллельно аккумуляторным батареям 41-4n подключены устройства контроля аккумуляторных батарей 71-7n, связанные входом с аккумуляторными батареями 41-4n для контроля состояния аккумуляторов (напряжения, давления - для никель-водородных аккумуляторов, температуры), а выходом - с нагрузкой 2. Кроме того, устройства контроля аккумуляторных батарей 71-7n содержат в своем составе схемы переключения с программного на аппаратный контур контроля и управления (на схеме не показано).
В цепи заряда-разряда аккумуляторных батарей установлены измерительные шунты 81-8n.
Зарядные устройства 51-5n состоят из регулирующего ключа 9, управляемого схемой управления 10, вольтодобавочного узла, выполненного на трансформаторе 5-3, транзисторах 5-1 и 5-2 и выпрямителя на диодах 5-4 и 5-5.
Разрядные устройства 61-6n состоят из регулирующего ключа 11, управляемого схемой управления 12.
Стабилизатор напряжения 3 состоит из регулирующего ключа 13, управляемого схемой управления 14, входного фильтра - конденсатор 15 и выходного фильтра на диоде 17, дросселе 18 и конденсаторе 16.
Схемы управления: 10 - зарядных устройств 51-5n, 12 - разрядных устройств 61-6n, 14 - стабилизатора напряжения 3, выполнены в виде широтно-импульсных модуляторов, входом подключенных к шинам стабилизируемого напряжения. Схемы управления 10 зарядных устройств 51-5n дополнительно связаны с измерительными шунтами 81-8n, устройствами контроля аккумуляторных батарей 71-7n и нагрузкой 2.
Устройство работает следующим образом.
В процессе эксплуатации аккумуляторные батареи 41-41 работают в основном в режиме хранения в заряженном состоянии и периодических дозарядов от солнечной батареи 1 через зарядные устройства 51-5n. Такой режим работы позволяет содержать их в постоянной готовности на случай аварийных ситуаций (например, потеря ориентации ИСЗ на Солнце) или на прохождение штатных теневых участков орбиты.
Питание нагрузки 2 осуществляется при этом от солнечной батареи 1 через стабилизатор напряжения 3.
При прохождении теневых участков орбиты либо при нарушении ориентации нагрузка 2 питается от аккумуляторных батарей 41-4n через разрядные устройства 61-6n.
Устройства контроля аккумуляторных батарей 71-7n контролируют текущее состояние аккумуляторов (напряжение, давление - для никель-водородных аккумуляторов, температура) аккумуляторных батарей 41-4n и передают информацию в нагрузку 2 (бортовую ЭВМ 2-1) для управления зарядом аккумуляторных батарей по программному контуру либо выдают управляющие воздействия непосредственно на схему управления зарядных устройств при работе с аппаратным контуром управления.
В процессе эксплуатации аккумуляторных батарей в составе СЭС КА в основном используется программный контур контроля и управления, связанный с бортовой ЭВМ. При этом аппаратный контур контроля и управления используют в качестве резервного контура при профилактических работах с бортовой ЭВМ и в случае нерасчетных перерывах в работе бортовой ЭВМ.
Включение аппаратного контура проводится автоматически, для чего, например, схема переключения с программного на аппаратный контур контроля и управления находится во «взведенном» состоянии и срабатывает при прекращении поступления регулярных меток от бортовой ЭВМ. При этом регулярные метки должны поступать не реже периода
τ=ΔСсущ/Iзар, где
τ - время, час;
ΔСсущ - максимальное существенное значение емкости перезаряда для используемой аккумуляторной батареи, А*час;
Iзар - ток заряда аккумуляторной батареи, А.
Переключение так же может быть проведено «принудительно» по радиокомандам с Земли.
Включение же программного контура проводится только по радиокомандам с Земли через командно-измерительную радиолинию после восстановления параметра факта работы бортовой ЭВМ.
Таким образом, заявляемый способ управления автономной системой электроснабжения космического аппарата обеспечивает повышение надежности эксплуатации при эффективном использовании аккумуляторных батарей путем исключения возможности перезаряда или переразряда аккумуляторных батарей из-за возможных аномалий в системе контроля их состояния и управления их работой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2524696C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2577632C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2535301C2 |
| Способ управления автономной системой электроснабжения космического аппарата | 2018 |
|
RU2706762C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2634473C9 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2541512C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2604206C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2460196C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2470440C2 |
Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) космических аппаратов (КА). Технический результат - повышение надежности эксплуатации при эффективном использовании аккумуляторных батарей. Способ заключается в контроле степени заряженности аккумуляторных батарей, управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжения системы электроснабжения и уровня заряженности аккумуляторных батарей. Осуществляют запрет на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снимают этот запрет при снижении уровня заряженности до определенного значения. Осуществляют запрет на работу соответствующего разрядного устройства при достижении минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при достижении определенного уровня заряженности данной аккумуляторной батареи. Контроль степени заряженности аккумуляторных батарей и управление работой зарядными устройствами проводят с использованием двух независимых контуров: аппаратного и программного, причем программный контур контроля и управления связан с бортовой ЭВМ и является основным, а аппаратный контур контроля и управления используют в качестве резервного контура. 1 ил.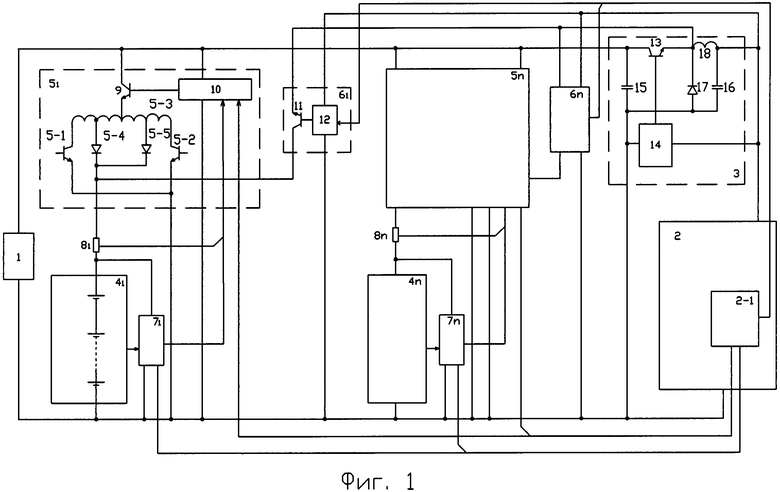
Способ управления автономной системой электроснабжения космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой и «n» зарядных и разрядных устройств, включающий контроль степени заряженности аккумуляторных батарей, управление зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электроснабжения и уровня заряженности аккумуляторных батарей, запрет на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятие этого запрета при снижении уровня заряженности до определенного значения, запрет на работу соответствующего разрядного устройства при достижении минимального уровня заряженности данной аккумуляторной батареи, снятие этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, при этом используют в составе космического аппарата бортовую ЭВМ и командно-измерительную радиолинию, отличающийся тем, что контроль степени заряженности аккумуляторных батарей и управление работой зарядными устройствами проводят с использованием аппаратного и программного независимых контуров, причем упомянутый программный контур связан с бортовой ЭВМ и используется в качестве основного контура, а упомянутый аппаратный контур используется в качестве резервного контура, при этом при использовании программного контура, не реже периода τ=ΔCсущ/Iзap, где
τ - время, час;
ΔСсущ - максимальное существенное значение емкости перезаряда для используемой аккумуляторной батареи, А*час;
Iзар - ток заряда аккумуляторной батареи, А,
контролируют факт работы бортовой ЭВМ и при его отсутствии проводят автоматическое переключение с программного на аппаратный контур, а обратное переключение проводят после восстановления работы бортовой ЭВМ по радиокоманде через командно-измерительную радиолинию с Земли.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2397594C2 |
| Коросниматель роторного окорочного станка | 1987 |
|
SU1519873A1 |

