Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) космических аппаратов (КА) с использованием в качестве первичных источников энергии солнечных батарей (СБ), а в качестве накопителей энергии - аккумуляторных батарей (АБ).
Известен способ управления автономной системой электроснабжения (патент РФ №2059988, H02J 7/35), содержащей солнечную батарею (СБ), стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, «n» аккумуляторных батарей (n≥1) и по «n» (по числу АБ) зарядных и разрядных устройств, а также для каждой АБ - устройства контроля степени заряженности.
В известной СЭС осуществляется непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение СБ) и выходного напряжений СЭС. При этом зарядные устройства обеспечивают заряд АБ, а стабилизатор напряжения и разрядное устройство обеспечивают питание потребителей.
Цепи непрерывного управления (обратной связи) зарядного устройства подключены к шине СБ и шине нагрузки, а цепи непрерывного управления стабилизатора напряжения и разрядного устройства подключены к шине нагрузки.
В зависимости от степени заряженности или разряженности АБ производится запрет или разрешение работы зарядного устройства и разрядного устройства.
Такое управление обеспечивает длительную автономную работу СЭС. Однако оно не обеспечивает сохранение работоспособности СЭС при нештатных или аварийных ситуациях на КА. В случае нештатного, незапланированного нарушения ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭС. Если потеря ориентации будет достаточно длительной, может произойти полный разряд всех АБ. Питание бортовых потребителей после этого прекратится.
Известен способ управления автономной системой электроснабжения (патент РФ №2168828, H01J 7/36), содержащей солнечную батарею и «n» аккумуляторных батарей, где n≥1, стабилизатор напряжения, включенный между солнечной батарей и нагрузкой, и по «n» зарядных и разрядных устройств, заключающийся в управлении стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжений системы, контроле степени заряженности и разряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня разряженности данной аккумуляторной батареи, запрете на работу соответствующего разрядного устройства при достижении предельного уровня разряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, отличающийся тем, что в случае потери ориентации солнечных батарей на Солнце, аварийном разряде аккумуляторных батарей и отключении части разрядных устройств, когда мощности оставшихся в работе разрядных устройств недостаточно для питания нагрузки, запрещают работу всех разрядных устройств, а также прекращают управление разрядными устройствами по сигналам об уровне заряженности, после восстановления ориентации солнечных батарей на Солнце сначала производят заряд аккумуляторных батарей до некоторого значения емкости, а затем разрешают работу разрядных устройств и возобновляют управление разрядными устройствами по сигналам об уровне заряженности.
Этот способ принят за прототип заявляемому изобретению. Известный способ решает задачу предотвращения выхода из строя аккумуляторов АБ, восстановления нормального функционирования СЭС после нештатной аварийной ситуации. Однако известный способ не дает рекомендаций по необходимой величине емкости аккумуляторных батарей для обеспечения последующей стабильной работы СЭС в данной ситуации. При заряде АБ «до некоторого значения емкости», величина этой емкости может оказаться недостаточной для работы в штатной конфигурации СЭС (разрешения работы разрядных устройств стабилизатора напряжения и возобновления управления разрядными устройствами по сигналам об уровне заряженности), так как после этого требуется определенное время для восстановления штатной ориентации КА (в том числе на Солнце, что, кстати, делается в первую очередь). Это может привести к повторной блокировке работы разрядных устройств и провалу выходного напряжения СЭС, что усугубит и без того высокую степень ее аварийного состояния.
Задачей заявляемого изобретения является повышение надежности процесса восстановления работоспособности СЭС после возникновения аварийных ситуаций, связанных с незапланированным глубоким разрядом аккумуляторных батарей (потерей ориентации КА на Солнце).
Поставленная задача решается тем, что при управлении автономной системой электроснабжения космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батарей и нагрузкой, и по «n» зарядных и разрядных устройств, заключающемся в управлении стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжений системы, контроле степени заряженности и разряженности аккумуляторных батарей, запрете на работу соответствующего зарядного устройства при достижении предельного уровня заряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня разряженности данной аккумуляторной батареи, запрете на работу соответствующего разрядного устройства при достижении предельного уровня разряженности данной аккумуляторной батареи, снятии этого запрета при достижении определенного уровня заряженности данной аккумуляторной батареи, а в случае потери ориентации солнечных батарей на Солнце, аварийном разряде аккумуляторных батарей и отключении части разрядных устройств, когда мощности оставшихся в работе разрядных устройств недостаточно для питания нагрузки, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности, после восстановления ориентации солнечных батарей на Солнце сначала проводят заряд аккумуляторных батарей до некоторого значения емкости, а затем разрешают работу разрядных устройств и возобновляют управление разрядными устройствами по сигналам об уровне заряженности, после частичного восстановления ориентации солнечных батарей на Солнце, когда энергия солнечной батареи появляется с периодом Т на время Т/2, перед разрешением работы разрядных устройств и возобновлением управления разрядными устройствами по сигналам об уровне заряженности, заряд аккумуляторных батарей проводят до значения суммарной энергоемкости Σ EАБ1÷n, превышающей величину (Uн·Iн·T)/(2·η), где
Σ EАБ1÷n - суммарная энергоемкость n АБ, Вт·час;
Uн - напряжение нагрузки, В;
Iн - ток нагрузки, А;
η - КПД разрядных устройств.
В процессе эксплуатации КА при разряде любой АБ до нижнего установленного уровня эта АБ переводится в режим хранения (блокируется разряд АБ).
После отключения соответствующего разрядного устройства питание нагрузки осуществляется оставшимися включенными разрядными устройствами от других АБ, еще не достигших установленного предельного уровня разряженности.
В случае если после запрета работы нескольких разрядных устройств мощности оставшихся в работе АБ и их разрядных устройств окажется недостаточно для обеспечения питания бортовых потребителей, запрещают работу всех разрядных устройств. Сигналом на переход СЭС в режим хранения может быть также снижение напряжения на выходных шинах СЭС ниже определенного значения (при недостатке мощности работающих разрядных устройств выходное напряжение СЭС начнет снижаться).
При случайном появлении освещенности СБ (восстановлении в какой-то мере ориентации СБ на Солнце) и повышения напряжения на входе СЭС начнет осуществляться заряд АБ. При этом можно снять блокировку работы разрядных устройств. Однако преждевременное снятие блокировки работы разрядных устройств может привести к повторному их блокированию из-за неопределенного положения неуправляемого КА в космическом пространстве.
Поэтому после частичного восстановления ориентации солнечных батарей на Солнце, когда энергия солнечной батареи появляется с периодом Т на время Т/2, перед разрешением работы разрядных устройств и возобновлением управления разрядными устройствами по сигналам об уровне заряженности, заряд аккумуляторных батарей проводят до значения суммарной энергоемкости Σ EАБ1÷n, превышающей величину (Uн·Iн·Т)/(2-η), где
Σ EАБ1÷n - суммарная энергоемкость n АБ, Вт·час;
Uн -напряжение нагрузки, В;
Iн - ток нагрузки, А;
η - КПД разрядных устройств.
Это позволит обеспечить стабильное напряжение на нагрузке (без провалов на время нахождения солнечных батарей в «тени») и провести восстановление ориентации КА на Солнце по командам с Земли через командно-измерительную радиолинию.
В качестве примера на фиг. 1 приведен вариант функциональной схемы автономной системы электроснабжения КА для реализации заявляемого способа.
Автономная система электроснабжения КА содержит: солнечную батарею 1, подключенную к нагрузке 2 через преобразователь напряжения 3, аккумуляторные батареи 41-4n, подключенные через зарядные преобразователи 51-5n к солнечной батарее 1, а через разрядные преобразователи 61-6n ко входу выходного фильтра преобразователя напряжения 3. Кроме того, аккумуляторные батареи 41- 4n содержат в своем составе байпасные разрядные цепи, состоящие из диодов, подключенных параллельно каждому аккумулятору в разрядном направлении (на схеме не показано).
Нагрузка 2 в своем составе содержит бортовую ЭВМ, систему телеметрии и командно-измерительную радиолинию.
К аккумуляторным батареям 41-4n подключены устройства контроля аккумуляторных батарей 71-7n, связанные входом с аккумуляторными батареями 41-4n для контроля напряжения, давления и температуры аккумуляторов, а выходом с нагрузкой 2. Кроме того, устройства контроля аккумуляторных батарей 71-7n содержат в своем составе разрядные сопротивления (на схеме не показано) для проведения профилактических разрядов аккумуляторных батарей 41-4n.
В цепи заряда-разряда аккумуляторных батарей установлены измерительные шунты 81-8n.
Зарядные преобразователи 51-5n состоят из регулирующего ключа 9, управляемого схемой управления 10, вольтодобавочного узла, выполненного на трансформаторе 5-5, транзисторах 5-1 и 5-2, и выпрямителя на диодах 5-3 и 5-4.
Разрядные преобразователи 61-6n состоят из регулирующего ключа 11, управляемого схемой управления 12.
Преобразователь напряжения 3 состоит из регулирующего ключа 13, управляемого схемой управления 14, входного фильтра на конденсаторе 3-1 и выходного фильтра на диоде 3-2, дросселе 3-3 и конденсаторе 3-4.
Схемы управления: 10 зарядных преобразователей 51-5n, 12 разрядных преобразователей 61-6n, 14 преобразователя напряжения 3, выполнены в виде широтно-импульсных модуляторов, входом подключенных к шинам стабилизируемого напряжения. Схемы управления 10 зарядных преобразователей 51-5n дополнительно связаны с измерительными шунтами 81-8n и нагрузкой 2.
Устройство работает следующим образом. В процессе эксплуатации аккумуляторные батареи 41-4n работают, в основном, в режиме хранения и периодических дозарядов от солнечной батареи 1 через зарядные преобразователи 51-5n. Такой режим работы позволяет содержать их в постоянной готовности на случай аварийных ситуаций (потеря ориентации КА на Солнце) или на прохождение штатных теневых участков орбиты.
Питание нагрузки 2 осуществляется при этом от солнечной батареи 1 через преобразователь напряжения 3.
При прохождении теневых участков орбиты, либо при нарушении ориентации КА на Солнце, нагрузка 2 питается от аккумуляторных батарей 41-4n через разрядные преобразователи 61-6n.
Устройства контроля 71-7n контролируют напряжение, давление и температуру аккумуляторов аккумуляторных батарей 41-4n и передают информацию об их состоянии в нагрузку 2.
В процессе эксплуатации КА по результатам анализа информации о состоянии АБ (в основном - напряжение аккумуляторов и АБ в целом), по аппаратной логике или по заранее заложенной в бортовую ЭВМ программе формируется запрет на работу всех разрядных устройств.
Данная ситуация возникнет в случае потери ориентации солнечных батарей КА на Солнце, аварийном разряде аккумуляторных батарей и отключении части разрядных устройств, когда мощности оставшихся в работе разрядных устройств недостаточно для питания нагрузки. При этом запрещают работу всех разрядных устройств.
После восстановления (частичного или полного) ориентации солнечных батарей на Солнце после повышения напряжения на входе СЭС идет заряд аккумуляторных батарей. При этом по данным телеметрии (по параметрам: давление в аккумуляторах - для никель-водородных АБ или напряжение аккумуляторов - для литий-ионных АБ) в центре управления полетом на Земле рассчитывают величину суммарной энергоемкости АБ. Запрет на работу разрядных устройств снимают по радиокоманде с Земли или автоматически после заряда АБ до величины суммарной энергоемкости, рассчитанной исходя из соотношения: Σ EАБ1÷n>(Uн·Iн·Т)/(2-η), где
Σ EАБ1÷n - суммарная энергоемкость n АБ, Вт·час;
Uн - напряжение нагрузки, В;
Iн - ток нагрузки, А;
η - КПД разрядных устройств.
Это позволяет повысить надежность процесса восстановления ориентации КА на Солнце.
Таким образом, заявляемый способ управления автономной системой электроснабжения космического аппарата обеспечивает повышение надежности процесса восстановления работоспособности СЭС после возникновения аварийных ситуаций, связанных с незапланированным глубоким разрядом аккумуляторных батарей (потерей ориентации КА на Солнце).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2535301C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2470440C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2604206C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2634473C9 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2541512C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2574922C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| Способ управления автономной системой электроснабжения космического аппарата | 2018 |
|
RU2706762C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2524696C2 |
Изобретение относится к электротехнике, а именно к системам электроснабжения (СЭС) космических аппаратов (КА). Технический результат - повышение надежности процесса восстановления работоспособности СЭС после возникновения аварийных ситуаций. Предлагается способ управления автономной системой электроснабжения, заключающийся в управлении стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжений системы, контроле степени заряженности и разряженности аккумуляторных батарей. В случае потери ориентации солнечных батарей на Солнце, аварийном разряде аккумуляторных батарей и отключении части разрядных устройств прекращают управление разрядными устройствами по сигналам об уровне заряженности. После восстановления ориентации солнечных батарей на Солнце сначала проводят заряд аккумуляторных батарей до некоторого значения емкости, а затем разрешают работу разрядных устройств. 1 ил.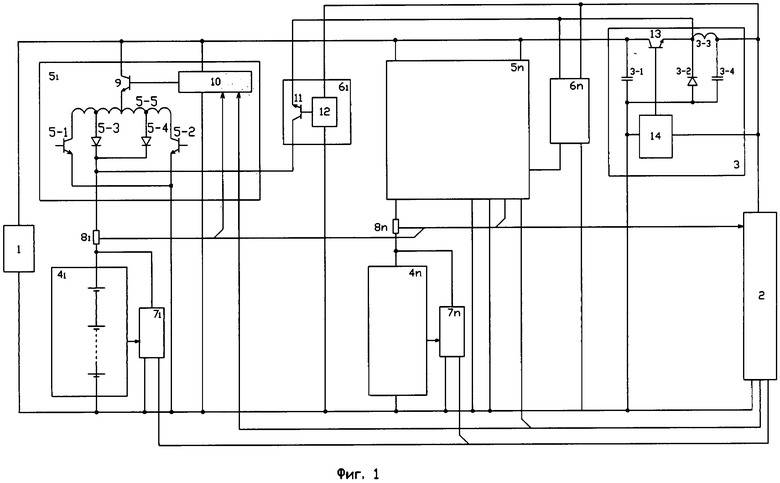
Способ управления автономной системой электроснабжения космического аппарата, содержащей солнечную батарею и «n» аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батарей и нагрузкой, и по «n» зарядных и разрядных устройств, включающий управление стабилизатором напряжения и зарядно-разрядными устройствами в зависимости от входного и выходного напряжений системы, контроль степени заряженности и разряженности аккумуляторных батарей, запрет на работу зарядного устройства при достижении предельного уровня заряженности соответствующей аккумуляторной батареи, снятие этого запрета при достижении определенного уровня разряженности аккумуляторной батареи, запрет на работу разрядного устройства при достижении предельного уровня разряженности соответствующей аккумуляторной батареи, снятие этого запрета при достижении определенного уровня заряженности аккумуляторной батареи и запрет работы всех разрядных устройств и прекращение управлением разрядными устройствами по сигналам об уровне заряженности в случае потери ориентации солнечных батарей на Солнце, аварийном разряде аккумуляторных батарей и отключении части разрядных устройств, когда мощности оставшихся в работе разрядных устройств недостаточно для питания нагрузки, при этом после восстановления ориентации солнечных батарей на Солнце сначала проводят заряд аккумуляторных батарей, а затем разрешают работу разрядных устройств и возобновляют управление разрядными устройствами по сигналам об уровне заряженности, отличающийся тем, что после частичного восстановления ориентации солнечных батарей на Солнце и появления энергии солнечной батареи с периодом Т на время Т/2, перед разрешением работы разрядных устройств и возобновлением управления разрядными устройствами по сигналам об уровне заряженности заряд аккумуляторных батарей (АБ) проводят до обеспечения величины суммарной энергоемкости  превышающей величину (Uн·Iн·Т)/(2·η), где
превышающей величину (Uн·Iн·Т)/(2·η), где
 - суммарная энергоемкость n АБ, Вт·час;
- суммарная энергоемкость n АБ, Вт·час;
Uн - напряжение нагрузки, В;
Iн - ток нагрузки, А;
η - КПД разрядных устройств.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| RU 2059988 C1, 10.05.1996 | |||
| RU 2059989 C1, 10.05.1996 | |||
| Устройство для кантования слитков | 1982 |
|
SU1133213A1 |
| . | |||

