Уровень техники, к которой относится изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к инерционно-ударному инструменту для выполнения линейного ударного воздействия на изделие и, более конкретно, к технологии смягчения силы реакции, принятой от изделия во время ударного действия.
Описание предшествующего уровня техники
Выложенная заявка на патент Японии № 8-318342 раскрывает технологию смягчения силы удара, вызванной отдачей бура инструмента после его ударного движения в перфораторе. В этом известном перфораторе резиновое кольцо (амортизирующий элемент) расположено между осевой торцевой поверхностью цилиндра на стороне корпуса и промежуточным элементом в форме ударника, который ударяет по буру инструмента. Когда бур инструмента принимает силу реакции от изделия и создает отдачу после ударного движения бура инструмента, ударник сталкивается с резиновым кольцом. В это время резиновое кольцо смягчает силу удара посредством упругой деформации. Дополнительно, резиновое кольцо также функционирует в качестве элемента для установки корпуса перфоратора относительно изделия во время осуществления удара. Во время ударного движения бура инструмента передний конец бура инструмента поддерживают прижатым к изделию (бур инструмента поддерживают в его ударном положении) с помощью прикладывания пользователем усилия прижима от себя к корпусу перфоратора. Цилиндр корпуса принимает усилие прижима через резиновое кольцо.
Как описано выше, известное резиновое кольцо осуществляет функцию ослабления силы удара, вызванной отдачей бура инструмента, и функцию установки перфоратора. Преимущественно резиновое кольцо должно быть мягким для поглощения отдачи бура инструмента. С другой стороны, выгодно, чтобы резиновое кольцо было твердым для улучшения точности установки. Другими словами, для известного резинового кольца требуются два различных свойства. Трудно обеспечить резиновому кольцу твердость, которая удовлетворяет обоим функциональным требованиям. В этом случае требуется дополнительное усовершенствование.
Сущность изобретения
Соответственно, цель настоящего изобретения состоит в том, чтобы обеспечить технологию, которая вносит свой вклад в уменьшение силы удара, вызванной отдачей бура инструмента после его ударного движения в инерционно-ударном инструменте.
Чтобы решить вышеизложенную проблему, инерционно-ударный инструмент согласно настоящему изобретению, показанный для примера, включает в себя корпус инструмента, элемент ударного воздействия и боек. Элемент ударного воздействия расположен в передней торцевой части корпуса инструмента и выполняет заданное ударное воздействие на изделие, совершая возвратно-поступательное движение в осевом направлении. Боек выполняет ударное движение посредством элемента ударного воздействия, совершая возвратно-поступательное движение в продольном направлении относительно корпуса инструмента. "Заданное ударное действие" в этом изобретении включает в себя не только ударное действие, при котором элемент ударного воздействия выполняет только линейное ударное движение, но и действие ударного сверления, в котором он выполняет линейное ударное движение и вращение по окружности. "Элемент ударного воздействия" в этом изобретении, как правило, содержит бур инструмента и ударник, который передает ударное усилие в состоянии контакта с буром инструмента.
Инерционно-ударный инструмент согласно изобретению дополнительно включает в себя груз и упругий элемент. Когда элемент ударного воздействия выполняет ударное воздействие на изделие, сила реакции передается от элемента ударного воздействия к грузу в положении передачи силы реакции, в котором груз располагается в прямом контакте с элементом ударного воздействия или в котором груз располагается в контакте с элементом ударного воздействия через промежуточный элемент, выполненный из твердого сплава. Когда посредством силы реакции, переданной к грузу, происходит обратное движение груза из положения передачи силы реакции и подталкивание упругого элемента, упругий элемент упруго деформируется и таким образом поглощает силу реакции. Дополнительно, в предпочтительном объекте настоящего изобретения массу груза устанавливают приблизительно на уровне 40% или больше от массы ударника. "Груз" в этом изобретении обычно представляет собой цилиндрический элемент, но он может содержать множество элементов, отделенных друг от друга в направлении по окружности. Кроме того, "упругий элемент" обычно представляет собой пружину, но он может являться и резиной.
Во время ударного действия элемент ударного воздействия вызывает отдачу, принимая силу реакции изделия после ударного движения. Согласно этому изобретению, имеющему конструкцию, в которой сила реакции передается от элемента ударного воздействия к грузу в положении передачи силы реакции, когда груз находится в прямом контакте с элементом привода ударника или когда груз находится в контакте с элементом ударного воздействия через промежуточный элемент, выполненный из твердого сплава, сила реакции составляет почти 100% от переданной. Другими словами, сила реакции передается посредством обмена импульсами между элементом ударного воздействия и грузом. С помощью этой передачи силы реакции происходит обратное перемещение груза в направлении действия силы реакции. Перемещающийся назад груз упруго деформирует упругий элемент, и сила реакции груза поглощается этой упругой деформацией. А именно, согласно данному изобретению сила реакции, вызванная отдачей элемента ударного воздействия, может быть поглощена обратным перемещением груза и упругой деформацией упругого элемента, которая вызвана перемещением груза. В результате можно уменьшить вибрацию инерционно-ударного инструмента.
Ударное действие с использованием инерционно-ударного инструмента выполняют в нагруженных состояниях, в которых передний конец элемента ударного воздействия прижимают к изделию усилием прижатия пользователя, приложенным спереди к корпусу инструмента (то есть в состоянии, в котором инерционно-ударный инструмент размещают относительно изделия). В это время элемент ударного воздействия поддерживают в положении, когда он будет приведен в действие с помощью приводного механизма, или в ударном положении, в котором боек ударяет по элементу ударного воздействия. "Положение передачи силы реакции" в этом изобретении относится к положению, в котором сила реакции, принятая от изделия элементом ударного воздействия, передается от элемента ударного воздействия к грузу, в котором элемент ударного воздействия приводят в действие с помощью приводного механизма, независимо от того, находится ли элемент ударного воздействия в прямом контакте с грузом или в контакте с грузом через промежуточный элемент. Поэтому положение передачи силы реакции в общем совпадает с вышеописанным ударным положением.
Согласно изобретению массу груза устанавливают на уровне приблизительно 40% или больше от массы ударника. В результате максимальное ускорение, произведенное силой реакции отдачи в процессе выполнения ударного движения может быть выгодно уменьшено.
В одном аспекте изобретения значительное уменьшение вибраций осуществляют при установленной массе груза в диапазоне от нижнего предела приблизительно 40% от массы бойка до верхнего предела приблизительно 200% от массы бойка. В частности, когда масса груза составляет приблизительно 80% от массы бойка, эффект уменьшения вибраций можно дополнительно увеличивать. Дополнительно, когда масса груза составляет приблизительно 200% от массы бойка, эффект уменьшения вибраций можно фактически повышать до максимума. Дополнительно, этот эффект уменьшения вибраций можно также сохранять посредством груза, имеющего дополнительно увеличенную массу более 200%. Однако масса груза может быть предпочтительно установлена приблизительно 200% или меньше от массы бойка вследствие баланса между отношением массы груза и всей массой перфоратора.
Как описано выше, во время ударного действия с использованием элемента ударного воздействия происходит перемещение груза назад посредством силы реакции, вызванной отдачей элемента ударного воздействия. В это время упругий элемент упруго деформируется и поглощает силу реакции, переданную к грузу. Груз затем возвращается силой упругости упругого элемента в положение передачи силы реакции, в котором сила реакции была передана от элемента ударного воздействия к грузу. Однако, когда боек выполняет следующее ударное движение на элементе ударного воздействия в области на полпути к тому времени, когда груз возвращается в положение передачи силы реакции, после того как груз перемещен назад из передающего положения силы реакции посредством воздействия силы реакции, груз и упругий элемент не функционируют должным образом.
В связи с этой проблемой, согласно одному аспекту изобретения частоту резонанса, определенную согласно предположению, что груз и упругий элемент являются моделями системы пружины-груза, можно устанавливать более чем на половину периода удара, который прикладывается бойком к элементу ударного воздействия. В такой конструкции груз можно возвращать к начальному положению передачи силы реакции к тому времени, когда боек выполняет следующий удар в то время, как происходит обратное перемещение груза под воздействием силы реакции элемента ударного воздействия. Поэтому груз и упругий элемент могут надежно функционировать при каждом ударе бойка. Таким образом, можно увеличивать эффект уменьшения вибрации.
Дополнительно, в одном аспекте изобретения упругий элемент содержит спиральную пружину, а коэффициент жесткости спиральной пружины устанавливают, чтобы удовлетворять условию k>π2mfo2, в котором коэффициент жесткости пружины обозначен как k, пи - π, масса груза - m и частота ударов, которые выполняют на элементе ударного воздействия бойком, - fo. Устанавливая коэффициент жесткости k спиральной пружины на такое значение, которое удовлетворяет вышеупомянутому уравнению, можно создать поглощающий удары механизм, в котором резонансную частоту, определяемую согласно предположению, что груз и упругий элемент являются моделями системы пружины-груза, устанавливают на величину более половины периода удара, который выполняют на элементе ударного воздействия бойком.
Дополнительно, в качестве одного аспекта изобретения между грузом и упругим элементом можно располагать вязкоупругий элемент, который служит для поглощения волны напряжений груза, когда сила реакции элемента ударного воздействия передается к грузу. Вязкоупругий элемент обычно может содержать резину.
Во время ударного действия сила реакции, вызванная отдачей элемента ударного воздействия, передается к грузу и создает волну напряжений в грузе. При такой конструкции, волна напряжения, созданная в грузе, может поглощаться деформацией вязкоупругого элемента. Поэтому, когда упругий элемент содержит пружину, можно предотвращать пульсацию пружины, которая может быть вызвана передачей волны напряжения к пружине. Таким образом, пружина может быть защищена.
Согласно изобретению создана технология, которая вносит свой вклад в уменьшение силы удара, вызванной отдачей бура инструмента после его ударного движения в инерционно-ударном инструменте. Другие цели, признаки и преимущества настоящего изобретения будут легко поняты после прочтения следующего подробного описания вместе с прилагаемыми чертежами и формулой изобретения.
Краткое описание чертежей
Фиг. 1 - вид сбоку в разрезе, схематично показывающий весь электрический перфоратор целиком согласно варианту осуществления этого изобретения, в нагруженных состояниях, в которых бур перфоратора прижимают к изделию.
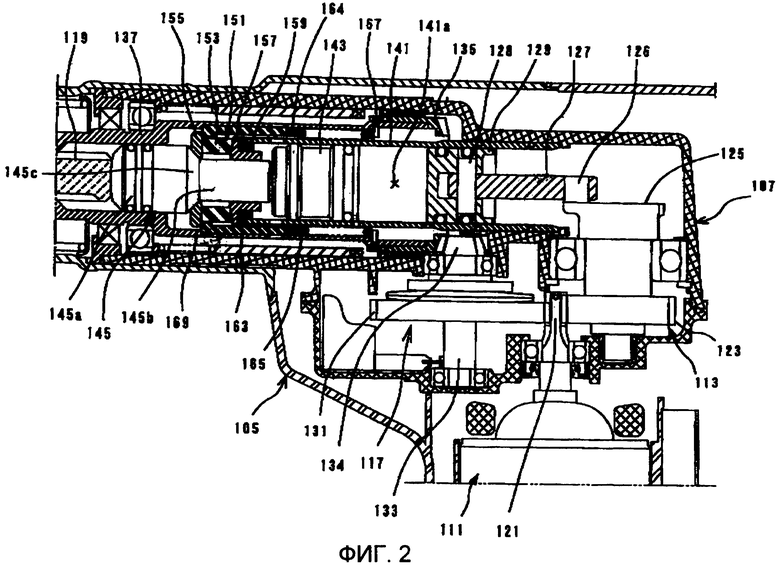
Фиг. 2 - увеличенный вид в разрезе, показывающий основную часть перфоратора.
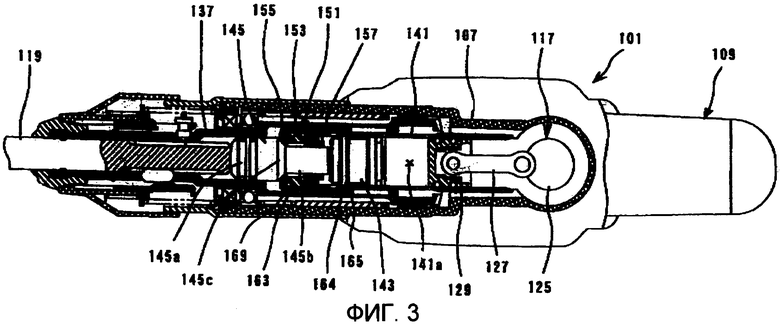
Фиг. 3 - вид сверху в разрезе, показывающий перфоратор в нагруженных состояниях, в которых бур перфоратора прижимают к изделию.
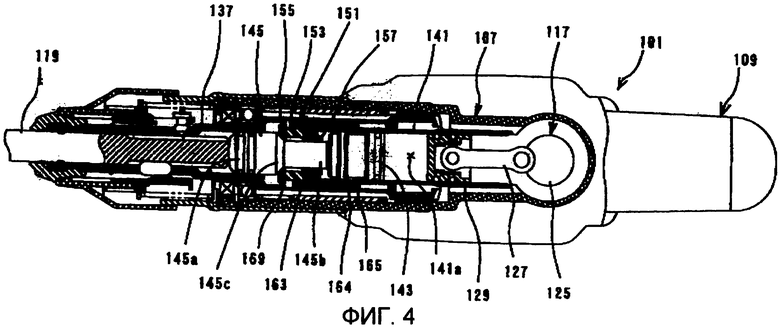
Фиг. 4 - вид сверху в разрезе, показывающий перфоратор во время действия груза и спиральной пружины.
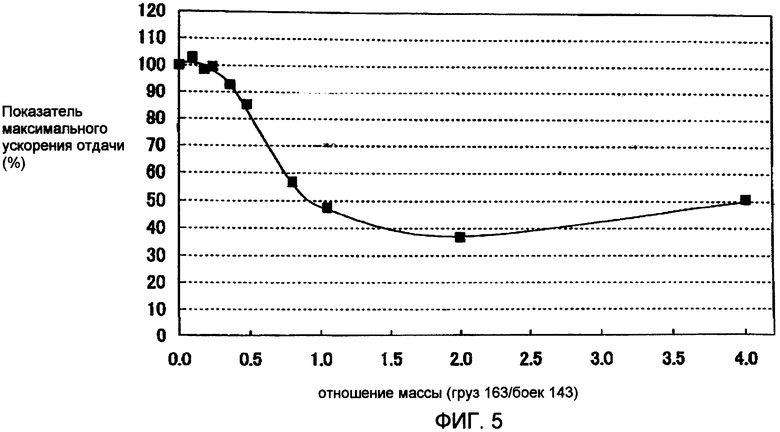
Фиг. 5 - диаграмма, показывающая изменение ускорения отдачи (силу реакции) относительно массы груза.
Фиг. 6 показывает форму волны ускорения в отсутствии груза и спиральной пружины.
Фиг. 7 показывает форму волны ускорения, когда масса груза составляет 50 г (отношение массы груза к бойку составляет 0,36).
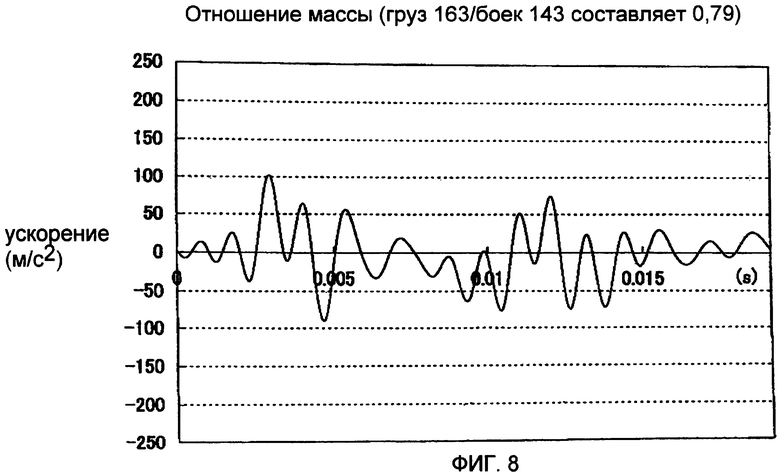
Фиг. 8 показывает форму волны ускорения, когда масса груза составляет 110 г (отношение массы груза к бойку составляет 0,79).
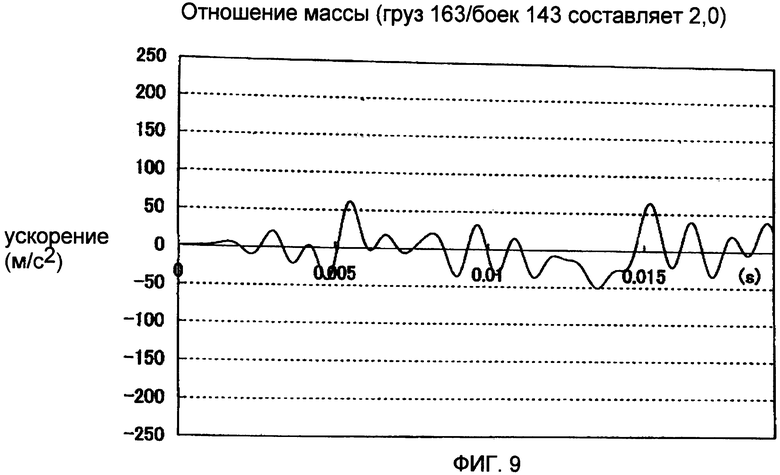
Фиг. 9 показывает форму волны ускорения, когда масса груза составляет 280 г (отношение массы груза к бойку составляет 2,0).
Подробное описание изобретения
Каждый из дополнительных признаков и этапов способа, раскрытых выше и ниже, можно использовать отдельно или в соединении с другими признаками и этапами способа, чтобы обеспечивать и изготавливать улучшенные инерционно-ударные инструменты и способ для использования таких инерционно-ударных инструментов и устройств, используемых здесь. Характерные примеры выполнения настоящего изобретения, которые в качестве примера используют многие из этих дополнительных признаков и этапов способа в соединении, теперь будут описаны конкретно со ссылками на чертежи. Это подробное описание предназначено только, чтобы предоставить специалисту в данной области техники дополнительные подробности для осуществления предпочтительных аспектов принципов настоящего изобретения и не предназначено для ограничения объема изобретения. Только формула изобретения определяет объем заявленного изобретения. Поэтому комбинации признаков и этапов, раскрытых в следующем подробном описании, возможно, не являются необходимыми для осуществления изобретения в самом широком смысле и вместо этого даны только для конкретного описания некоторых характерных примеров изобретения, и это подробное описание будет теперь дано со ссылкой на прилагаемые чертежи.
Вариант осуществления настоящего изобретения теперь описан со ссылкой на фиг. 1-9. Фиг. 1 представляет вид сбоку в разрезе, показывающий целиком электрический перфоратор 101, как характерный вариант осуществления инерционно-ударного инструмента согласно настоящему изобретению, в нагруженных состояниях, в которых бур перфоратора прижат к изделию. Как показано на фиг. 1, перфоратор 101 согласно этому варианту осуществления включает в себя корпус 103, бур перфоратора 119, съемным образом соединенный с передней торцевой частью (с левой стороны на фиг. 1) корпуса 103 через держатель 137 инструмента, и рукоятку 109, которая соединена с задней торцевой частью (с правой стороны на фиг. 1) корпуса 103 и предназначена для удерживания пользователем. Корпус 103 является признаком, который соответствует "корпусу инструмента" согласно настоящему изобретению. Бур 119 перфоратора закрепляется в держателе 137 инструмента так, что он обеспечивает возможность возвратно-поступательного движения относительно держателя 137 инструмента в его осевом направлении и препятствует вращению относительно держателя 137 инструмента в его направлении по окружности. В настоящем варианте осуществления, для удобства объяснения, сторона бура 119 перфоратора обозначена, как передняя сторона, а сторона рукоятки 109 обозначена как задняя сторона.
Корпус 103 включает в себя кожух 105 электродвигателя, который вмещает приводной электродвигатель 111, и кожух 107 шестерни, который вмещает приводной механизм в форме механизма 113 преобразования движения, ударный механизм 115 и механизм 117 трансмиссии. Механизм 113 преобразования движения выполнен с возможностью соответствующего преобразования вращения на выходе приводного электродвигателя 111 в линейное движение и последующей передачи его на ударный механизм 115. В результате сила удара создается в осевом направлении бура 119 перфоратора через ударный механизм 115. Кроме того, скорость вращения на выходе приводного электродвигателя 111 соответственно понижается механизмом 117 трансмиссии и затем передается на бур 119 перфоратора. В результате бур 119 перфоратора вращается по окружности. Рукоятка 109 в общем выполнена U-образной формы на виде сбоку и имеет нижний конец и верхний конец. Нижний конец рукоятки 109 соединен с возможностью вращения с нижней частью заднего конца кожуха 105 двигателя посредством шарнира 109a, а верхний конец соединен с верхней частью заднего конца кожуха 105 двигателя посредством упругой пружины 109b для поглощения вибрации. Таким образом, передача вибрации от корпуса 103 к рукоятке 109 уменьшается.
Фиг. 2 представляет увеличенный вид в разрезе, изображающий существенную часть перфоратора 101. Механизм 113 преобразования движения включает в себя ведущую шестерню 121, которая вращается в горизонтальной плоскости приводным электродвигателем 111, ведомую шестерню 123, которая входит в зацепление с ведущей шестерней 121, кривошипный диск 125, который вращается вместе с ведомой шестерней 123 в горизонтальной плоскости, плечо 127 кривошипа, которое свободно соединено одним концом с кривошипным диском 125 через вал 126 эксцентрика в положении, расположенном на заданном расстоянии от центра вращения кривошипного диска 125, и ведущий элемент в форме поршня 129, установленный на другом конце плеча 127 кривошипа посредством соединительного вала 128. Кривошипный диск 125, плечо 127 кривошипа и поршень 129 образуют кривошипный механизм.
Механизм 117 передачи электроэнергии включает в себя ведущую шестерню 121, которую приводит в действие приводной электродвигатель 111, передаточная шестерня 131 которого входит в зацепление с ведущей шестерней 121, передаточный вал 133, который приводится во вращение в горизонтальной плоскости вместе с передаточной шестерней 131, маленькую коническую шестерню 134, установленную на передаточном валу 133, большую коническую шестерню 135, которая входит в зацепление с малой конической шестерней 134, и держатель 137 инструмента, который приводится во вращение вместе с большой конической шестерней 135 в вертикальной плоскости. Перфоратор 101 может переключаться между ударным режимом и режимом ударного сверления. В ударном режиме перфоратор 101 выполняет ударное воздействие на изделие, применяя только ударное усилие к буру 119 перфоратора в осевом направлении. В режиме ударного сверления перфоратор 101 выполняет ударно-сверлильное воздействие на изделие, применяя ударное усилие в осевом направлении и вращающее усилие в направлении по окружности к буру 119 перфоратора. Такая конструкция перфоратора 101 непосредственно не связана с настоящим изобретением и поэтому не будет описана с дополнительными подробностями. Изделие здесь на чертежах не показано.
Ударный механизм 115 включает в себя боек 143, который расположен с возможностью скольжения вместе с поршнем 129 в рассверленном отверстии цилиндра 141. Боек 143 приводится в действие посредством пневмобаллонной пружины воздушной камеры 141a цилиндра 141, которое вызывается скользящим перемещением поршня 129. Боек 143 затем сталкивается (соударяется) с промежуточным элементом в виде ударника 45, который расположен внутри держателя 137 инструмента с возможностью скольжения и передает ударное усилие буру 119 перфоратора через ударник 145. Ударник 145 и бур 119 перфоратора являются, в частности, признаками, которые соответствуют "элементу ударного воздействия" согласно данному изобретению. Ударник 145 включает в себя участок 145a большого диаметра, участок 145b малого диаметра и клиновидный участок 145c. Участок 145a большого диаметра подогнан в тесном контакте с внутренней поверхностью держателя 137 инструмента, в то время как между участком 145b малого диаметра и внутренней поверхностью держателя 137 инструмента определена заданная степень пространства. Клиновидный участок 145c образован в граничной области между обоими участками 145a и 145b диаметров. Ударник 145 расположен внутри держателя 137 инструмента в такой ориентации, что участок 145a большого диаметра находится на передней стороне, а участок 145b малого диаметра находится на задней стороне.
Перфоратор 101 включает в себя установочный элемент 151, который позиционирует корпус 103 относительно изделия посредством контакта с ударником 145, когда ударник 145 оттянут назад (к поршню 129) вместе с буром 119 перфоратора в нагруженных состояниях, в которых бур 119 перфоратора прижат к изделию надавливающим усилием пользователя, приложенным вперед к корпусу 103. Установочный элемент 151 является частью узла, включающего в себя резиновое кольцо 153, переднюю шайбу 155 из твердого сплава, соединенную в осевом направлении с передней поверхностью резинового кольца 153, и заднюю шайбу 157 из твердого сплава, соединенную в осевом направлении с задней поверхностью резинового кольца 153. Установочный элемент 151 свободно установлен в участке 145b малого диаметра ударника 145.
Когда ударник 145 оттянут назад, клиновидный участок 145c ударника 145 соприкасается с передней металлической шайбой 155 установочного элемента 151, а задняя металлическая шайба 157 соприкасается с передним концом цилиндра 141. Таким образом, резиновое кольцо 153 установочного элемента 151 упруго соединяет ударник 145 с цилиндром 141, который неподвижно прикреплен к кожуху 107 шестерни. Передняя металлическая шайба 155 имеет коническое рассверленное отверстие. Когда ударник 145 оттянут назад, клиновидная поверхность передней металлической шайбы 155 тесно контактирует с клиновидным участком 145c ударника 145. Дополнительно, задняя металлическая шайба 157 имеет форму сечения, в общем подобную шляпке, и цилиндрический участок заданной длины, который установлен в участке 145b малого диаметра ударника 145 и фланец которого выступает в радиальном направлении наружу от цилиндрического участка. Задняя поверхность фланца находится в контакте с осевым передним концом цилиндра 141 посредством распорной детали 159.
Для поглощения силы удара (силы реакции), которая вызвана отдачей бура 119 перфоратора после ударного движения бура 119 перфоратора во время ударного воздействия на изделие, перфоратор 101 согласно этому варианту осуществления включает в себя цилиндрический груз 163 из твердого сплава, который соединен с ударником 145 через переднюю металлическую шайбу 155 и спиральную пружину 165, которая обычно смещает цилиндрический груз 163 к ударнику 145 (вперед). Цилиндрический груз 163 и спиральная пружина 165 образуют поглощающий удары механизм, который также рассматривают как демпфер ударов. Цилиндрический груз 163, спиральная пружина 165 и передняя металлическая шайба 155 являются признаками, которые соответствуют "грузу", "упругому элементу" и "промежуточному элементу" соответственно согласно этому изобретению. Дополнительно, резиновое кольцо 164 расположено между цилиндрическим грузом 163 и спиральной пружиной 165 и служит для поглощения волны напряжения цилиндрического груза 163. Резиновое кольцо 164 является признаком, который соответствует "вязкоупругому элементу" согласно этому изобретению.
Цилиндрический груз 163 расположен между внешней поверхностью установочного элемента 151 и внутренней поверхностью держателя 137 инструмента и может перемещаться в направлении оси бура перфоратора. Движением груза 163 управляют вдоль внутренней поверхности держателя 137 инструмента. А именно, цилиндрический груз 163 и установочный элемент 151 установлены параллельно в радиальном направлении и в таком же положении на оси бура 119 перфоратора. Цилиндрический груз 163 продолжается дополнительно назад от внешней периферийной области установочного элемента 151 к внешней передней области цилиндра 141. Резиновое кольцо 164 расположено на заднем конце груза 163, а спиральная пружина 165 упруго расположена между резиновым кольцом 164 и держателем 137 инструмента под предварительно определенной начальной нагрузкой. Таким образом, цилиндрический груз 163 смещен вперед, и его передний конец находится обычно в контакте с элементом управления в форме ступенчатого стопора 169 управления положением, выполненного в держателе 137 инструмента так, чтобы препятствовать продвижению груза 163 за пределы его ударного положения. Другими словами, силой смещения (силой упругости) спиральной пружины 165, которая смещает груз 163 вперед, управляют, чтобы предотвращать существенное действие вперед за пределы ударного положения груза 163. Ударное положение здесь относится к положению, в котором боек 143 сталкивается (соударяется) с ударником 145. Это ударное положение совпадает с положением, в котором сила реакции от ударника 145 передается к грузу 163. Это ударное положение является признаком, который соответствует "положению передачи силы реакции" согласно этому изобретению.
В нагруженных состояниях, в которых ударник 145 оттянут назад вместе с буром 119 перфоратора, осевой передний конец цилиндрического груза 163 находится в поверхностном контакте с радиально направленным наружу участком задней поверхности передней металлической шайбы 155 установочного элемента 151. Конкретно, цилиндрический груз 163 находится в контакте с ударником 145 посредством передней металлической шайбы 155. Поэтому, когда происходит отскок бура 119 перфоратора и ударника 145, которые принимают силу реакции от изделия после ударного движения, сила реакции от ударника 145 передается к цилиндрическому грузу 163, который находится в контакте с ударником 145 посредством передней металлической шайбы 155. Передняя металлическая шайба 155 образует элемент передачи силы реакции и имеет больший диаметр, чем внешний диаметр резинового кольца 153. Таким образом, осевой передний конец цилиндрического груза 163 находится в контакте с внешней частью передней металлической шайбы 155, направленной наружу от внешней поверхности резинового кольца 153. Резиновое кольцо 164, расположенное между цилиндрическим грузом 163 и спиральной пружиной 165, упруго деформируется волной напряжений, переданной от ударника 145 к цилиндрическому грузу 163. Таким образом, резиновое кольцо 164 поглощает волну напряжений и предотвращает передачу волны напряжений к спиральной пружине 165. А именно, резиновое кольцо 164 главным образом служит элементом для поглощения волны напряжения. Когда цилиндрический груз 163 перемещается назад, принимая силу реакции от ударника 145, спиральная пружина 165 вытягивается через резиновое кольцо 164 цилиндрическим грузом 163. В результате спиральная пружина 165 упруго деформируется и поглощает силу реакции. Один осевой конец спиральной пружины 165 поддерживается в контакте с осевой задней торцевой поверхностью цилиндрического груза 163, а другой осевой конец находится в контакте с принимающим кольцом 167 пружины, прикрепленным к держателю 137 инструмента.
Теперь будет объясняться работа перфоратора 101, имеющего конструкцию, как описано выше. Когда приводной электродвигатель 111 (показанный на фиг. 1) приводят в действие, вращение на выходе приводного электродвигателя 111 вызывает вращение ведущей шестерни 121 в горизонтальной плоскости. Когда ведущая шестерня 121 вращается, кривошипный диск 125 вращается в горизонтальной плоскости через ведомую шестерню 123, которая входит в зацепление с ведущей шестерней 121. Затем, поршень 129 скользящим образом совершает возвратно-поступательное перемещение внутри цилиндра 141 через плечо 127 кривошипа. Боек 143 совершает возвратно-поступательное перемещение внутри цилиндра 141 и сталкивается (соударяется) с ударником 145 посредством воздействия пневмобаллонной пружины, функционирующей внутри цилиндра 141 в результате скользящего перемещения поршня 129. Кинетическая энергия бойка 143, которая вызывается столкновением с ударником 145, передается к буру 119 перфоратора. Таким образом, бур 119 перфоратора выполняет ударное движение в своем осевом направлении, и выполняется ударное воздействие на изделие.
Когда перфоратор 101 приводят в действие в режиме ударного сверления, вращение ведущей шестерни 121 осуществляется с помощью вращения на выходе приводного электродвигателя 111, а передаточная шестерня 131, которая входит в зацепление с ведущей шестерней 121, приводится во вращение вместе с передаточным валом 133 и малой конической шестерней 134 в горизонтальной плоскости. Затем приводят во вращение большую коническую шестерню 135, которая входит в зацепление с малой конической шестерней 134, в вертикальной плоскости, которая в свою очередь приводит во вращение держатель 137 инструмента и бур 119 перфоратора, установленного в держателе 137 инструмента, вместе с большой конической шестерней 135. Таким образом, в режиме ударного сверления, бур 119 перфоратора выполняет ударное движение в осевом направлении и вращательное движение по окружности так, чтобы выполнять воздействие перфоратора на изделие.
Вышеописанное действие выполняют в положении, в котором бур 119 перфоратора прижат к изделию и в котором бур 119 перфоратора и держатель 137 инструмента оттянуты назад, как показано на фиг. 1-3. Ударник 145 оттянут назад, когда держатель 137 инструмента оттянут назад. Ударник 145 затем входит в контакт с передней металлической шайбой 155 установочного элемента 151, а задняя металлическая шайба 157 входит в контакт с передним концом цилиндра 141. А именно, цилиндр 141 сбоку корпуса 103 принимает толкающее усилие в буре 119 перфоратора так, чтобы корпус 103 расположить относительно заготовки. В этом положении выполняют ударное действие или действие ударного сверления. В это время, как описано выше, передняя торцевая поверхность цилиндрического груза 163 поддерживается в контакте с задней поверхностью передней металлической шайбы 155 установочного элемента 151.
После ударного движения бура 119 перфоратора на изделие происходит отскок бура 119 перфоратора за счет силы реакции от изделия. Эта отдача вызывает действие ударника 145 в соответствие с обратной силой реакции. В это время цилиндрический груз 163 находится в контакте с ударником 145 через переднюю металлическую шайбу 155 установочного элемента 151. Поэтому, в этом состоянии контакта посредством передней металлической шайбы 155, сила реакции ударника 145 передается к цилиндрическому грузу 163. Другими словами, происходит обмен импульсами между ударником 145 и цилиндрическим грузом 163. Посредством такой передачи силы реакции ударник 145 поддерживается по существу в состоянии покоя в ударном положении, в то время как происходит перемещение назад в направлении действия силы реакции цилиндрического груза 163. Как показано на фиг. 4, перемещающийся назад цилиндрический груз 163 упруго деформирует спиральную пружину 165, и сила реакции груза 163 поглощается такой упругой деформацией.
В это время сила реакции ударника 145 также действует на резиновое кольцо 153, которое поддерживается в контакте с ударником 145 через переднюю металлическую шайбу 155. В целом, скорость передачи усилия одного объекта увеличивается в соответствии с модулем упругости (модулем Юнга) другого объекта, размещенного в контакте с первым объектом. Согласно этому варианту осуществления цилиндрический груз 163 демпфера 161 ударов выполнен из твердого сплава и имеет высокий модуль упругости, в то время как резиновое кольцо 153, выполненное из резины, имеет низкий модуль упругости. Поэтому большая часть силы реакции ударника 145 передается к цилиндрическому грузу 163, который имеет высокий модуль упругости и который размещен в контакте с металлическим ударником 145 через твердую переднюю металлическую шайбу 155. Таким образом, сила удара, вызванная отдачей бура 119 перфоратора и ударника 145, может быть фактически поглощена перемещением назад цилиндрического груза 163 и упругой деформацией спиральной пружины 165, которая вызвана перемещением цилиндрического груза 163. В результате вибрация перфоратора 101 может быть уменьшена. В это время резиновое кольцо 164, расположенное между цилиндрическим грузом 163 и спиральной пружиной 165, упруго деформируется и таким образом поглощает волну напряжений, переданную от ударника 145 к цилиндрическому грузу 163. Таким образом, резиновое кольцо 164 предотвращает передачу волны напряжения цилиндрического груза 163 к спиральной пружине 165. В результате резиновое кольцо 164 может предотвращать пульсацию спиральной пружины 165 и может защищать ее.
Таким образом, согласно этому варианту осуществления большая часть силы реакции, которую бур 119 перфоратора и ударник 145 принимают от изделия после ударного движения, передается от ударника 145 к цилиндрическому грузу 163. Ударник 145 находится по существу в состояние покоя, как видно из ударного положения. Поэтому только незначительная сила реакции действует на резиновое кольцо 153. Соответственно, такая сила реакции вызывает только небольшую упругую деформацию в резиновом кольце 153, и последующее отталкивание также уменьшается. Дополнительно, сила реакции ударника 145 может быть поглощена демпфером 161 ударов, который включает в себя цилиндрический груз 163 и спиральную пружину 165. Поэтому резиновое кольцо 153 можно выполнять твердым. В результате такое резиновое кольцо 153 может обеспечивать правильное расположение корпуса 103 относительно изделия.
Дополнительно, в этом варианте осуществления стопор 169 управляет силой смещения спиральной пружины 165 так, что сила смещения предотвращает существенное действие вперед за пределы ударного положения. Поэтому во время ударного движения, когда пользователь прикладывает усилие прижима вперед к корпусу 103, чтобы поддерживать бур 119 перфоратора и ударник 145 в ударном положении, даже при наличии спиральной пружины 165 для поглощения силы реакции, для поддерживания бура 119 перфоратора и ударника 145 не требуется лишних усилий. В конструкции отличной от этой, такой как механизм предотвращения холостого пуска, в котором усилие пружины от себя обычно действует на бур 119 перфоратора и ударник 145 во время ударного движения, может быть реализован эффективный механизм, в котором можно уменьшать неблагоприятное воздействие упругой силы для поглощения силы реакции.
Кроме того, согласно этому варианту осуществления передним положением цилиндрического груза 163 механически управляют посредством стопора 169. Таким образом, в этом состоянии, в котором усилие смещения спиральной пружины 165 прикладывают к цилиндрическому грузу 163, цилиндрическим грузом 163 управляют для предотвращения перемещения за пределы ударного положения. Соответственно, параметры настройки состояния для поглощения силы реакции, включающие в себя параметры настройки усилия смещения спиральной пружины 165 или веса цилиндрического груза 163, можно улучшать.
Кроме того, согласно этому варианту осуществления сила реакции от изделия передается цилиндрическому грузу 163 через бур 119 перфоратора и ударник 145. Таким образом, силу реакции от заготовки можно передавать к цилиндрическому грузу 163 сконцентрированно, не рассеивая на полпути при передаче. В результате эффективность передачи силы реакции к цилиндрическому грузу 163 увеличивается так, что эффективность поглощения удара можно повышать.
Кроме того, в этом варианте осуществления цилиндрический груз 163 и установочный элемент 151 установлены параллельно в радиальном направлении и в таком же положении на оси бура 119 перфоратора. Таким образом, можно осуществить эффективную конфигурацию для экономии пространства. Дополнительно, ударник 145 входит в контакт с цилиндрическим грузом 163 и резиновым кольцом 153 через общий твердый металлический лист или переднюю металлическую шайбу 155. Поэтому силу реакции ударника 145 можно передавать от одной точки к двум элементам через общий элемент, то есть от ударника 145 к цилиндрическому грузу 163 и резиновому кольцу 153 через переднюю металлическую шайбу 155. Кроме того, конструкцию можно упрощать.
Автор изобретения провел динамическое испытание на перфораторе 101, имеющем цилиндрический груз (в дальнейшем упомянутый просто как "груз") 163 и спиральную пружину 165, чтобы проверить отношения между массой груза 163 и эффектом уменьшения вибрации, предполагая, что масса груза 163 влияет на эффективность поглощения силы реакции или эффект уменьшения вибрации. Динамическое испытание проводилось при условиях, когда масса испытуемого устройства составляла 5,85 кг, сила прижатия испытуемого устройства составляла 100 Н, масса бойка составляла 140 г, скорость бойка составляла 9,65 м/с (среднее значение), диаметр бура составлял ⌀ 20 и фильтр нижних частот составлял 1 кГц. Дополнительно, при динамическом испытании использовали набор грузов 163 для изменения массы в диапазоне 20-560 г. Динамическое испытание проводили несколько раз для каждого груза 163, имеющего различные массы.
Фиг. 5 показывает результаты испытаний. Фиг. 5 показывает изменение ускорения отдачи (силы реакции) относительно массы груза 163. Абсцисса показывает отношение массы груза 163 к массе бойка 143, а ордината показывает отношение максимального ускорения отдачи, которое принято в размере 100% в отсутствии груза 163 и спиральной пружины 165. Результаты испытаний показали, что максимальное ускорение силы реакции отдачи во время удара уменьшается приблизительно на 10%, когда отношение массы груза 163 к массе бойка 143 составляет приблизительно 0,4. Кроме того, максимальное ускорение силы реакции отдачи во время удара уменьшается приблизительно на 50%, когда отношение массы груза 163 к массе бойка 143 составляет приблизительно 0,8. Кроме того, также показано, что когда отношение массы груза 163 к массе бойка 143 составляет приблизительно 2,0, то максимальное ускорение силы реакции отдачи во время удара уменьшается приблизительно на 60% и может быть получен наибольший эффект уменьшения вибраций. Во время испытания, также было показано, что когда отношение массы превышает такое значение, при котором можно получить наибольший эффект уменьшения вибрации, максимальное ускорение не существенно изменялось, и наибольший эффект уменьшения вибраций может быть сохранен.
Фиг. 6-9 показывают конкретные результаты испытаний для проверки эффекта уменьшения вибраций в зависимости от коэффициента массы груза 163 и максимального ускорения, как описано выше. Фиг. 6-9 показывают формы волн ускорения с помощью коэффициента массы груза 163. А именно, фиг. 6 показывает форму волны ускорения в отсутствии груза 163 и спиральной пружины 165. Фиг. 7 показывает форму волны ускорения, когда масса груза 163 составляет 50 г (отношение массы груза 163 к массе бойка 143 составляет 0,36). Фиг. 8 показывает форму волны ускорения, когда масса груза 163 составляет 110 г (отношение массы груза 163 к массе бойка 143 составляет 0,79). Фиг. 9 показывает форму волны ускорения, когда масса груза 163 составляет 280 г (отношение массы груза 163 к массе бойка 143 составляет 2,0).
Согласно результатам испытания, когда коэффициент массы груза 163 составляет 0 в отсутствие груза 163 и спиральной пружины 165, как показано на фиг. 6, ускорение достигает приблизительно 240 м/с2. Когда коэффициент массы составляет 0,36, как показано на фиг. 7, ускорение уменьшается приблизительно до 170 м/с2. Кроме того, когда коэффициент массы составляет 0,79, как показано на фиг. 8, ускорение уменьшается приблизительно до 100 м/с2. Кроме того, когда коэффициент массы составляет 2,0, как показано на фиг. 9, ускорение уменьшается приблизительно до 60 м/с2.
Учитывая вышеописанное, отметим, что функцию значительного уменьшения вибраций можно выполнять, когда масса груза 163 установлена в диапазоне от нижнего предела приблизительно 40% от массы бойка 143 до верхнего предела приблизительно 200% массы бойка 143. В частности, когда масса груза 163 составляет приблизительно 80% от массы бойка 143, эффект уменьшения вибраций может быть дополнительно увеличен. Кроме того, когда масса груза 163 составляет приблизительно 200% от массы бойка 143, эффект уменьшения вибраций можно фактически увеличивать до максимума. Кроме того, этот эффект уменьшения вибраций можно также поддерживать посредством груза 163, имеющего дополнительно увеличенную массу. Однако, также было обнаружено, на практике предпочтительно, чтобы масса груза 163 составляла приблизительно 200% или ниже от массы бойка 143 вследствие баланса между отношением массы груза и всей массы перфоратора 101.
При ударном действии бура 119 перфоратора, как описано выше, груз 163 перемещается назад силой реакции, вызванной отдачей ударника 145. В это время спиральная пружина 165 упруго деформируется и поглощает силу реакции. Груз 163 затем возвращается силой упругости спиральной пружины 165 к положению передачи силы реакции, в котором сила реакции передана от ударника 145 к грузу 163. Однако, когда боек 143 выполняет следующее ударное движение на ударник 145 в области полпути к тому времени, когда груз 163 возвращается к положению передачи силы реакции после того, как происходит обратное перемещение груза 163 за счет приема силы реакции, груз 163 и спиральная пружина 165 не функционируют должным образом.
Поэтому в этом варианте осуществления резонансная частота, определенная согласно предположению, что груз 163 и спиральная пружина 165 являются моделями системы пружины-груза, установлена на уровне более половины частоты удара, который выполняют на ударнике 145 бойком 143. Другими словами, коэффициент жесткости спиральной пружины 165 устанавливают так, что период резонанса, определенный согласно предположению, что груз 163 и спиральная пружина 165, являются моделями системы пружины-груза, установлен ниже половины периода удара, который выполняют на ударнике 145 бойком 143. Таким образом, груз 163 и спиральная пружина 165 могут функционировать должным образом. А именно, груз 163 и спиральная пружина 165 могут надежно поглощать воздействие от каждого удара бойка 143.
Условие, которому должен удовлетворять коэффициент жесткости спиральной пружины 165, чтобы груз 163 и спиральная пружина 165 должным образом функционировали при каждом ударе бойка 143 математически получают следующим образом:
где fo [Гц] и То [с] - частота ударов и период ударов бойка 143 соответственно.
Далее, согласно предположению, что груз 163 и спиральная пружина 165 являются моделями системы пружины-груза, угловую скорость ω во время резонанса моделей системы пружины-груза получают следующим образом:
где массу груза 163 принимают как m [кг], коэффициент жесткости спиральной пружины 165 составляет k [Н/м] и резонансная частота моделей системы пружины-груза составляет T [с].
Далее, из соотношений между периодом резонанса моделей системы пружины-груза и периода ударов бойка 143,
Замена T=2π√(k/m) из Уравнения (2) в Уравнение (3) дает:
Возводим в квадрат Уравнение(4), в котором период То ударов, коэффициент k жесткости и m массы - все положительные числа,
π2m/k<To2
Поэтому условие, которому должен удовлетворять коэффициент жесткости спиральной пружины 165, составляет:
Устанавливая постоянную пружины спиральной пружины 165 на такое значение, которое удовлетворяет Уравнению (6), можно выполнить такую конструкцию, что груз 163 и спиральная пружина 165 будут функционировать должным образом.
Кроме того, в этом варианте осуществления вязкоупругий элемент в форме резинового кольца 164 расположен между цилиндрическим грузом 163 и спиральной пружиной 165 и служит для поглощения волны напряжения цилиндрического груза 163. Масса резинового кольца 164 значительно меньше, чем масса цилиндрического груза 163. Кроме того, хотя резиновое кольцо 164 деформируется волной напряжения цилиндрического груза 163, степень такой деформации значительно меньше, чем степень деформации спиральной пружины 165. Поэтому, при установке вышеописанного коэффициента жесткости спиральной пружины 165, резиновое кольцо 164 можно рассматривать как часть груза 163, и фактически оно вносит незначительный неблагоприятный эффект.
Кроме того, в перфораторе 101 согласно этому варианту осуществления редуктор динамических вибраций, который не показан, может быть установлен в корпусе 103 и может быть использован совместно с механизмом поглощения ударов, имеющим груз 163 и спиральную пружину 165. В этом случае функцию пассивного уменьшения вибраций можно осуществлять в отношении периодической вибрации, которая происходит в корпусе 103 в его продольном направлении во время ударного действия. Таким образом, вибрация корпуса 103 может быть эффективно уменьшена. Кроме того, давление внутри камеры кривошипа, в которой размещен механизм кривошипа, нестабильно при работе перфоратора 101. Поэтому его можно сконструировать так, что нестабильное давление вводят в редуктор динамических вибраций, а груз, являющийся составляющей частью редуктора динамических вибраций, активно приводят в действие. Другими словами, можно использовать метод принудительных вибраций. В этом случае редуктор динамических вибраций функционирует как активный механизм уменьшения вибраций посредством принудительной вибрации груза. Таким образом, вибрацию, вызванную в корпусе 103 во время ударного действия, можно дополнительно эффективно уменьшать.
В вышеизложенном варианте осуществления перфоратор 101 был описан в качестве характерного примера инерционно-ударного инструмента. Однако настоящее изобретение можно также применять в отбойном молотке. Кроме того, в вышеизложенном варианте осуществления сила реакции была описана как передаваемая от ударника 145 к цилиндрическому грузу 163, но его можно также сконструировать так, что сила реакции будет передаваться от бура 119 перфоратора к цилиндрическому грузу 163. Кроме того, цилиндрический груз 163 может иметь форму, отличную от цилиндрической формы.
Кроме того, в вышеизложенном варианте осуществления было описано использование кривошипно-шатунного механизма в качестве механизма 113 преобразования движения для преобразования вращения на выходе приводного электродвигателя 111 в линейное движение, чтобы линейно приводить в действие бур 119 перфоратора. Однако механизм преобразования движения не ограничен кривошипно-шатунным механизмом, а в качестве механизма преобразования движения, например, может быть использован торцовый кулак, который по оси раскачивается. Кроме того, в вышеупомянутом варианте осуществления стопор 169 служит для предотвращения перемещения вперед цилиндрического груза 163 так, что усилием смещения спиральной пружины 165 управляют, чтобы предотвращать существенное действие вперед за пределы ударного положения. Однако, вместо осуществления управления стопором 169, конструкцию можно изменить таким образом, что, например, установить спиральную пружину 165 в свободном положении, в котором не применяют начальный груз. Кроме того, с точки зрения амортизации силы реакции, принятой от изделия во время ударного действия, резиновое кольцо 164 можно расположить между спиральной пружиной 165 и приемным кольцом 167 пружины.
Описание ссылочных позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2510326C2 |
| ИНЕРЦИОННО-УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2006 |
|
RU2341366C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2011 |
|
RU2570863C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2477211C2 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2553175C2 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2009 |
|
RU2496631C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2466854C2 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2531221C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2507060C2 |
| УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2008 |
|
RU2478034C2 |


Изобретение относится к области инерционно-ударных инструментов. Инструмент содержит корпус, элемент ударного воздействия, боек, который выполняет ударное движение на элементе ударного воздействия, груз и упругий элемент. Груз контактирует с элементом ударного воздействия напрямую или через промежуточный элемент. Упругий элемент взаимодействует с грузом. При этом массу груза устанавливают в размере приблизительно 40% или больше от массы бойка. В результате уменьшается вибрация инструмента. 2 н. и 6 з.п. ф-лы, 9 ил.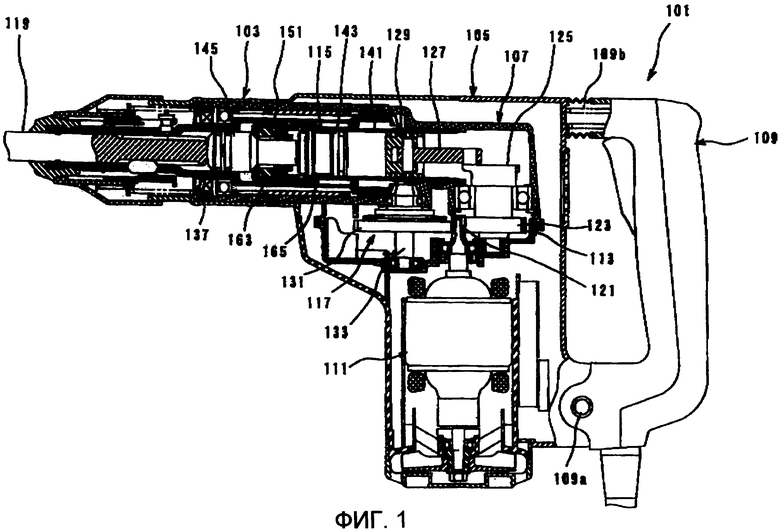
1. Инерционно-ударный инструмент, содержащий
корпус инструмента,
элемент ударного воздействия, который расположен в передней торцевой части корпуса инструмента и выполняет заданное ударное воздействие на изделие, совершая возвратно-поступательное движение в осевом направлении,
боек, который выполняет ударное движение на элементе ударного воздействия, совершая возвратно-поступательное перемещение в продольном направлении относительно корпуса инструмента,
груз, к которому сила реакции передается от элемента ударного воздействия в положение передачи силы реакции, в котором груз размещен в прямом контакте с элементом ударного воздействия, или в котором груз размещен в контакте с элементом ударного воздействия через промежуточный элемент, выполненный из твердого сплава, когда элемент ударного воздействия выполняет ударное воздействие на изделие, и
упругий элемент, который упруго деформируется, вызывая обратное перемещение груза от положения передачи силы реакции посредством силы реакции, переданной к грузу и проталкивающей упругий элемент, таким образом поглощая силу реакции,
отличающийся тем, что массу груза устанавливают в размере приблизительно 40% или больше от массы бойка.
2. Инерционно-ударный инструмент по п.1, в котором массу груза выбирают приблизительно от 40% до приблизительно 200% от массы бойка.
3. Инерционно-ударный инструмент по п.1, в котором массу груза выбирают приблизительно от 80% до приблизительно 200% от массы бойка.
4. Инерционно-ударный инструмент по п.1, в котором резонансную частоту, определенную согласно предположению, что груз и упругий элемент являются моделями системы пружины-массы, устанавливают в размере более половины периода удара, который выполняют на элементе ударного воздействия бойком.
5. Инерционно-ударный инструмент по п.4, в котором упругий элемент содержит спиральную пружину, а коэффициент жесткости спиральной пружины устанавливают, чтобы он удовлетворял условию, что k>π2mfo2, где k - коэффициент жесткости пружины; π - число "пи"; m - масса груза; fo - частота ударов, которые выполняют на элементе ударного воздействия бойком.
6. Инерционно-ударный инструмент по п.4, в котором вязкоупругий элемент расположен между грузом и упругим элементом и служит для поглощения волны напряжения груза, когда сила реакции элемента ударного воздействия передается к грузу.
7. Инерционно-ударный инструмент по п.1, в котором вязкоупругий элемент расположен между грузом и упругим элементом для поглощения волны напряжения груза, когда сила реакции элемента ударного воздействия передается грузу.
8. Инерционно-ударный инструмент, содержащий
корпус инструмента,
элемент ударного воздействия, который расположен в передней торцевой части корпуса инструмента и выполняет заданное ударное воздействие на изделие, совершая возвратно-поступательное движение в осевом направлении,
боек, который выполняет ударное движение на элементе ударного воздействия, совершая возвратно-поступательное движение в продольном направлении относительно корпуса инструмента,
груз, к которому сила реакции передается от элемента ударного воздействия в положение передачи силы реакции, в котором груз размещен в прямом контакте с элементом ударного воздействия или в котором груз помещен в контакте с элементом ударного воздействия через промежуточный элемент, выполненный из твердого сплава, когда элемент ударного воздействия выполняет ударное воздействие на изделие, и
упругий элемент, который упруго деформируется, вызывая обратное перемещение груза от положения передачи силы реакции посредством силы реакции, переданной к грузу и проталкивающей упругий элемент, таким образом поглощая силу реакции,
отличающийся тем, что резонансную частоту определяют согласно предположению, что груз и упругий элемент являются моделями системы пружины-груза, установленной на уровне более половины периода удара, который выполняют на элементе ударного воздействия бойком.
| GB 816351 A, 08.07.1959 | |||
| JP 8318342 A, 03.12.1996 | |||
| US 4388972 A, 21.06.1983 | |||
| Отбойный молоток | 1937 |
|
SU59802A1 |

