Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится к технологии снижения уровня вибрации в ударном инструменте, таком как молоток и бурильный молоток, в котором осуществляется привод в действие долота.
Описание предшествующего уровня техники
В публикации WО 2005/105386 раскрыт электрический молоток, имеющий механизм снижения уровня вибрации. Известный молоток имеет устройство динамического снижения вибрации, в котором используется кривошипно-шатунный механизм для активного привода груза устройства динамического снижения уровня вибрации для понижения уровня вибрации, возникающей во время ударного действия.
Сущность изобретения
Цель изобретения состоит в создании ударных инструментов, обеспечивающих снижение уровня их вибрации и увеличение эффективности ударного действия.
Упомянутая выше цель может быть достигнута с помощью заявленного изобретения.
Представленный ударный инструмент выполняет ударное действие на обрабатываемой детали, используя ударное движение в осевом направлении долота. Представленный ударный инструмент включает в себя корпус, цилиндр, установленный в корпусе, устройство динамического снижения вибрации и механизм механической вибрации. "Ударное действие" в настоящем изобретении, соответственно, включает в себя не только действие, при котором долото выполняет только ударное движение в осевом направлении, но также действие бурильного молотка, при котором он выполняет ударное движение в осевом направлении и вращение вокруг своей оси. Устройство динамического снижения вибрации в настоящем изобретении имеет груз, который может линейно двигаться под действием силы смещения упругого элемента, и снижает уровень вибрации корпуса во время ударного действия в результате движения груза в осевом направлении долота. По меньшей мере, достаточно, чтобы на груз, используемый в качестве элемента устройства динамического снижения вибрации, воздействовала сила смещения упругого элемента. На груз может дополнительно воздействовать демпфирующая сила демпфирующего элемента. "Упругий элемент" в настоящем изобретении обычно содержит пружину. Механизм механической вибрации осуществляет активный привод в движение груза, прикладывает внешнюю силу, которая не является силой вибрации корпуса инструмента, к грузу через упругий элемент. В результате такого активного привода в движение груза через механизм механической вибрации и принудительной вибрации устройства динамического снижения вибрации устройство динамического снижения вибрации можно постоянно приводить в действие, независимо от величины вибрации ударного инструмента.
В соответствии с предпочтительным вариантом воплощения настоящего изобретения груз и упругий элемент расположены на оси долота и между внутренней поверхностью стенки корпуса и внешней поверхностью стенки цилиндра таким образом, что они охватывают, по меньшей мере, часть внешней поверхности стенки цилиндра в направлении окружности. Термин "охватывают, по меньшей мере, часть поверхности внешней стенки цилиндра в направлении окружности", в широком смысле включает в себя вариант, в соответствии с которым груз имеет цилиндрический корпус, выполненный круглым, эллиптическим или многоугольным в сечении, и охватывает всю внешнюю поверхность стенки цилиндра в направлении окружности, и вариант, в котором груз имеет цилиндрический корпус, имеющий частичный вырез в направлении окружности, такой как тело, имеющее в общем С-образное сечение, и в отношении упругого элемента, он представляет вариант, в соответствии с которым спиральная пружина кольцеобразно установлена снаружи цилиндра.
В соответствии с настоящим изобретением, с помощью конструкции, в которой груз и упругий элемент, формирующие устройство динамического снижения вибрации, расположены между внутренней поверхностью стенки корпуса и внешней поверхностью стенки цилиндра, центры тяжести груза и упругого элемента могут быть, по существу, размещены на оси долота. В результате предотвращается создание результирующей силы или силы вращения вокруг оси, проходящей поперечно в направлении оси долота, когда груз движется в осевом направлении долота. Кроме того, в соответствии с настоящим изобретением, существующее пространство можно использовать для установки механизма снижения уровня вибрации, что позволяет эффективно уменьшить размер ударного инструмента.
В соответствии с дополнительным вариантом воплощения настоящего изобретения ударный инструмент дополнительно включает в себя приводной механизм, который приводит в линейное движение долото. Приводной механизм включает в себя двигатель, ударный элемент, который линейно движется в осевом направлении долота таким образом, что он обеспечивает линейное движение долота, и первый кривошипно-шатунный механизм, преобразующий вращение на выходе двигателя в линейное движение и, таким образом, осуществляет привод в движение ударного элемента. Механизм механической вибрации включает в себя скользящий элемент, который линейно движется в осевом направлении долота таким образом, что он прикладывает внешнюю силу к упругому элементу и ко второму кривошипно-шатунному механизму, который преобразует вращение первого кривошипно-шатунного механизма в линейное движение и, таким образом, осуществляет привод скользящего элемента. Кроме того, второй кривошипно-шатунный механизм приводят в движение с помощью двигателя через первый кривошипно-шатунный механизм.
В соответствии с настоящим изобретением, как ударный элемент, так и скользящий элемент могут приводится в движение от одного двигателя, и, таким образом, обеспечивается рациональная система привода.
В соответствии с другим вариантом воплощения настоящего изобретения ударный инструмент включает в себя отверстие, сформированное в корпусе, через которое устанавливают первый кривошипно-шатунный механизм в корпус, и закрывающий элемент, который может быть установлен в отверстии снаружи корпуса инструмента таким образом, что он закрывает отверстие. Первый кривошипно-шатунный механизм имеет кривошипный вал, который установлен с возможностью вращения в корпусе и обращен к отверстию. Второй кривошипно-шатунный механизм имеет кривошипный вал, который установлен с возможностью вращения на закрывающем элементе и напротив кривошипного вала первого кривошипно-шатунного механизма. Вогнутый участок сформирован на одном из противоположных концов кривошипных валов первого и второго кривошипно-шатунных механизмов, и выпуклый участок сформирован на другом из противоположных концов кривошипных валов и может соединяться с вогнутым участком. Когда закрывающий элемент установлен в отверстии, кривошипные валы первого и второго кривошипно-шатунного механизмов соединяются с помощью соединения между вогнутым участком и выпуклым участком таким образом, что вращение кривошипного вала первого кривошипно-шатунного механизма может быть передано на кривошипный вал второго кривошипно-шатунного механизма. Способ установки "противоположно" в данном изобретении предпочтительно представляет способ противоположной установки, по существу, на одной оси.
В соответствии с настоящим изобретением второй кривошипно-шатунный механизм установлен на закрывающем элементе для закрывания отверстия, и когда закрывающий элемент устанавливают в отверстии, кривошипный вал первого кривошипно-шатунного механизма и кривошипный вал второго кривошипно-шатунного механизма взаимно соединяются путем соединения между вогнутым участком и выпуклым участком таким образом, что может передаваться вращение. При использовании такой конструкции, благодаря предварительной установке второго кривошипно-шатунного механизма на закрывающем элементе и последующей установки закрывающего элемента в отверстии второй кривошипно-шатунный механизм можно легко устанавливать на первом кривошипно-шатунном механизме. Таким образом упрощается сборка. Отверстие, сформированное в корпусе инструмента, предусмотрено как отверстие, через которое первый кривошипно-шатунный механизм устанавливают внутри корпуса инструмента. Кроме того, над первым кривошипно-шатунным механизмом присутствует верхняя область как свободное пространство. В соответствии с этим изобретением, второй кривошипно-шатунный механизм может быть расположен с использованием этого свободного пространства. Таким образом, второй кривошипно-шатунный механизм может быть установлен без изменения внешних размеров существующего ударного инструмента.
В соответствии с дополнительным вариантом воплощения настоящего изобретения груз расположен в корпусе инструмента с возможностью перемещения вдоль внутренней поверхности стенки корпуса инструмента в осевом направлении долота. При использовании такой конструкции линейное перемещение груза вдоль внутренней поверхности стенки корпуса инструмента может быть стабилизировано. Кроме того, груз и упругий элемент, которые расположены на стороне корпуса инструмента, могут быть установлены без контакта с внешней поверхностью стенки цилиндра. Поэтому, если такая конструкция будет применена в ударном инструменте такого типа, например, в котором ударный элемент приводится в движение в результате флуктуации давления воздуха в цилиндре и ударяет долото, может быть предотвращено отрицательное влияние груза на отверстие для вентиляции воздуха, сформированное в цилиндре для обеспечения сообщения между воздушной камерой и окружающей средой.
Кроме того, в качестве другого варианта изобретения, представленный ударный инструмент может включать в себя корпус, цилиндр, установленный внутри корпуса инструмента, приводной элемент, который линейно движется в осевом направлении долота внутри цилиндра, ударный элемент, который линейно движется в осевом направлении долота внутри цилиндра, и воздушную камеру, образованную между элементом привода и ударным элементом внутри цилиндра. Ударный элемент принудительно линейно движется в результате флуктуации давления воздушной камеры в результате линейного движения элемента привода и ударяет долото, в результате чего выполняется ударное действие на обрабатываемой детали.
Кроме того, ударный инструмент может дополнительно включать в себя вентиляционную часть, которая сформирована в цилиндре и обеспечивает сообщение между воздушной камерой и наружной атмосферой для регулирования давления в воздушной камере и обеспечения плавного движения ударного элемента, и элемент открывания и закрывания вентиляционной части, который расположен снаружи цилиндра и способен скользить в осевом направлении долота. Во время ударного действия с помощью долота элемент открывания и закрывания вентиляционной части управляет ее открыванием и закрыванием, двигаясь между открытым положением для открытия вентиляционной части, и закрытым положением для закрытия вентиляционной части в заданные моменты времени.
В соответствии с изобретением, в варианте, в котором элемент открывания и закрывания вентиляционной части расположен снаружи цилиндра и управляет ее открыванием и закрыванием, моменты открывания и закрывания или момент времени, в который вентиляционная часть переключается с закрытого положения в открытое положение во время ударного движения ударного элемента, и момент времени, в который вентиляционная часть переключается с открытого положения в закрытое положение во время отвода ударного элемента, можно произвольно регулировать в зависимости от положения ударного элемента. В частности, в соответствии с данным изобретением, вентиляционная часть может быть открыта только в случае необходимости. В результате, давлением в камере воздуха можно управлять таким образом, что во время ударного движения ударного элемента обеспечивается оптимальная ударная скорость ударного элемента, повышая эффективность ударного действия, и во время отвода ударного элемента оптимальная отводящая сила действует на ударный элемент.
Другие цели, признаки и преимущества настоящего изобретения очевидны из следующего подробного описания изобретения со ссылками на прилагаемые чертежи, на которых изображено следующее.
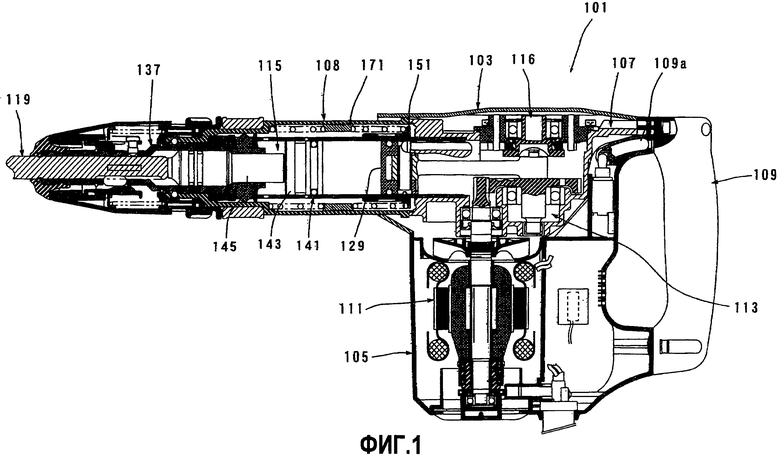
На фиг.1 показан вид в разрезе электрического молотка в соответствии с вариантом воплощения настоящего изобретения.
На фиг.2 показан вид в разрезе части молотка в состоянии, в котором муфта скольжения, по существу, находится в промежуточном положении.
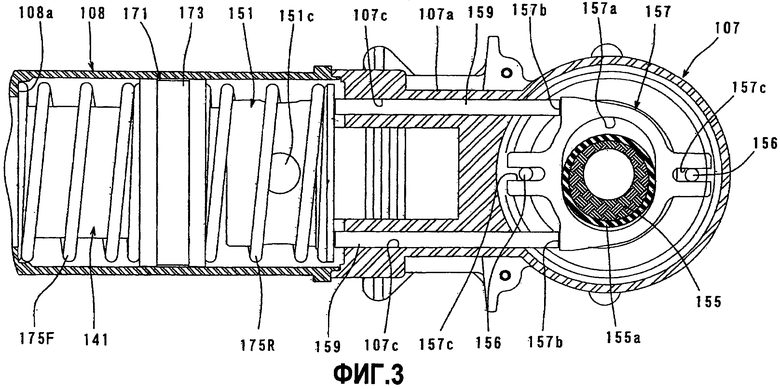
На фиг.3 показан вид в разрезе вдоль линии А-А на фиг.2.
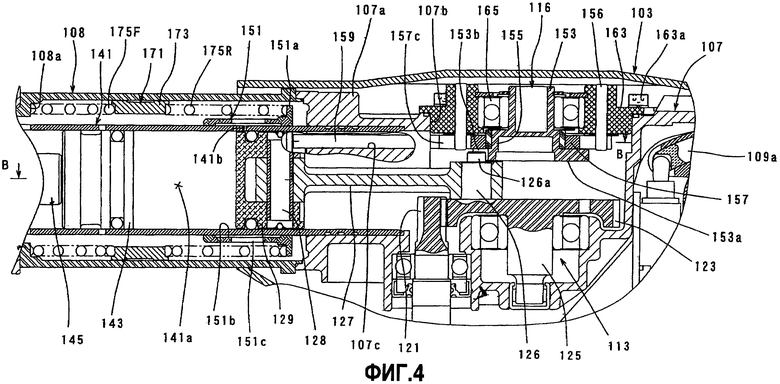
На фиг.4 показан увеличенный вид в разрезе, представляющий существенную часть молотка в состоянии, в котором муфта скольжения находится в переднем оконечном положении.
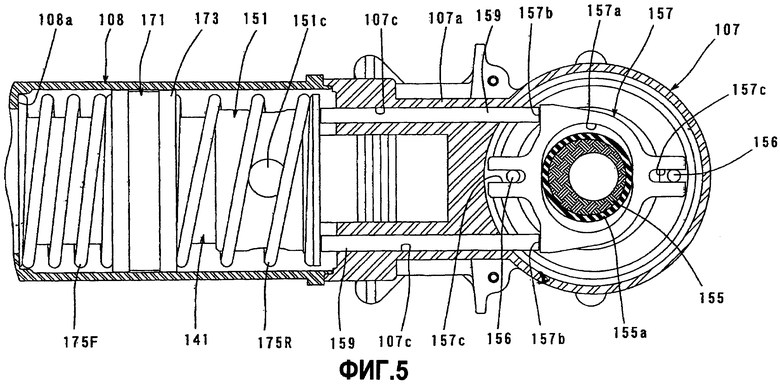
На фиг.5 показан вид в разрезе вдоль линии B-B на фиг.4.
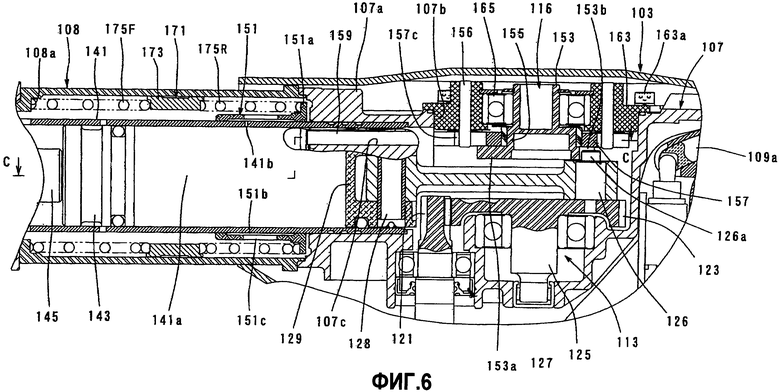
На фиг.6 показан увеличенный вид в разрезе, представляющий существенную часть молотка в состоянии, в котором муфта скольжения находится в заднем оконечном положении.
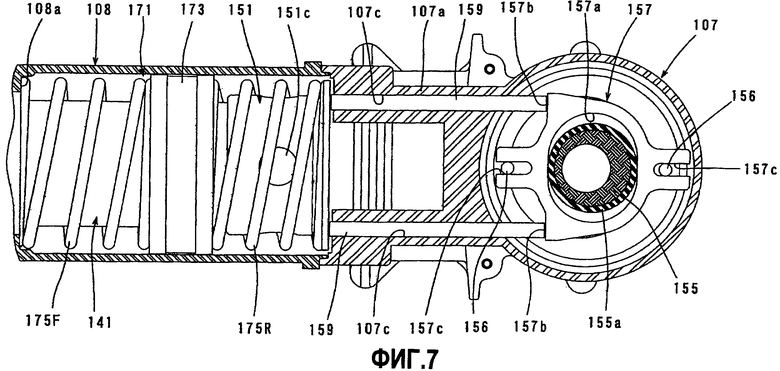
На фиг.7 показан вид в разрезе вдоль линии C-C на фиг.6.
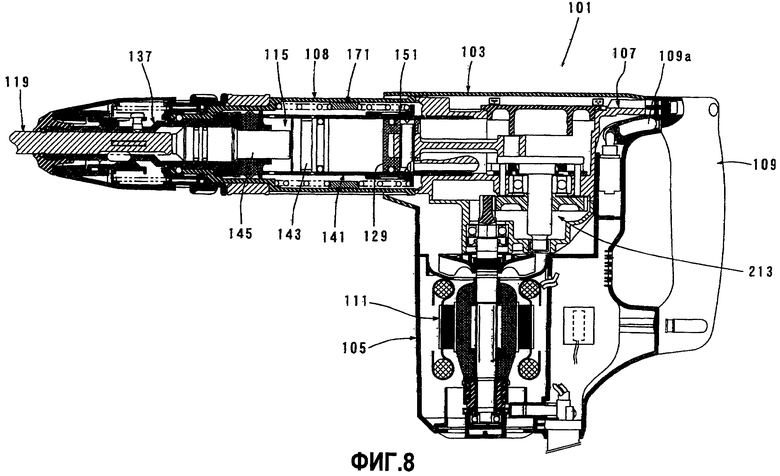
На фиг.8 показан вид в разрезе, схематично представляющий весь электрический молоток в соответствии со вторым вариантом воплощения настоящего изобретения.
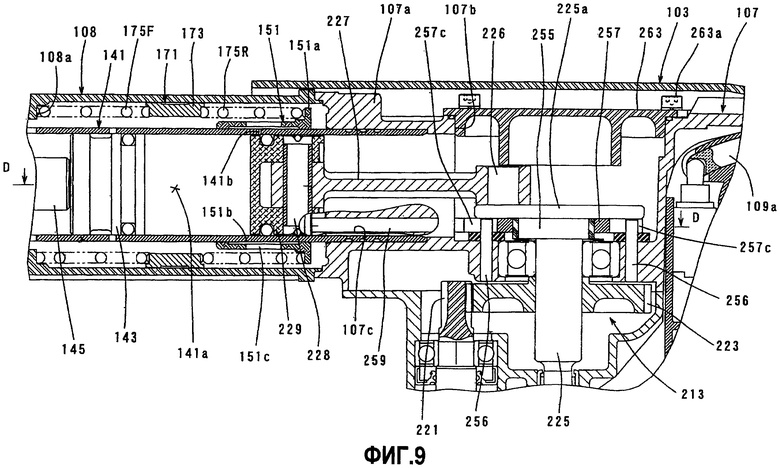
На фиг.9 показан с увеличением вид в разрезе, представляющий существенную часть молотка.
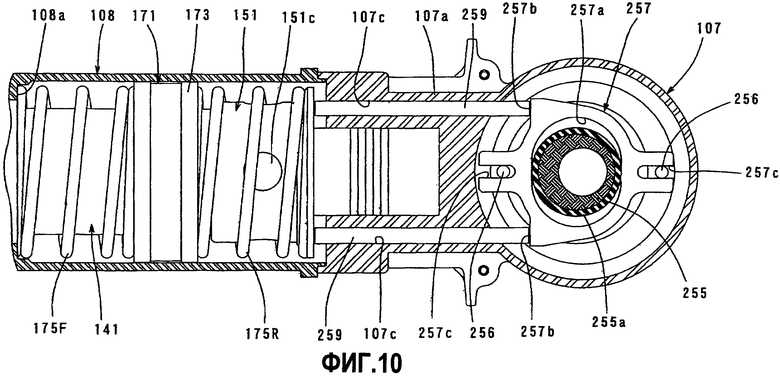
На фиг.10 показан вид в разрезе вдоль линии D-D на фиг.9.
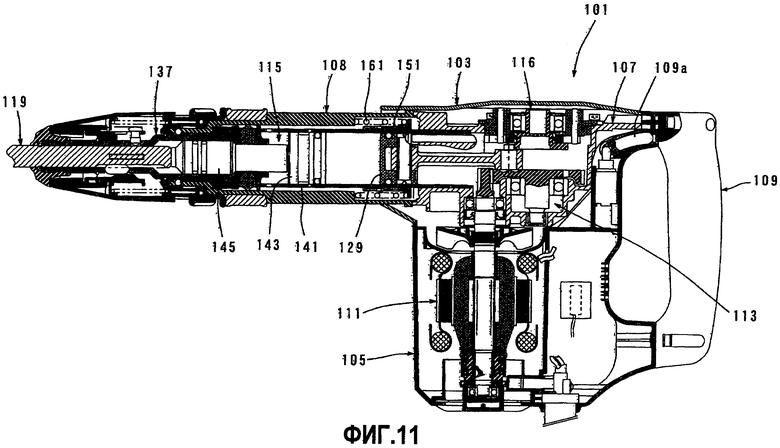
На фиг.11 показан вид в разрезе, схематично представляющий весь электрический молоток в соответствии с третьим вариантом воплощения настоящего изобретения.
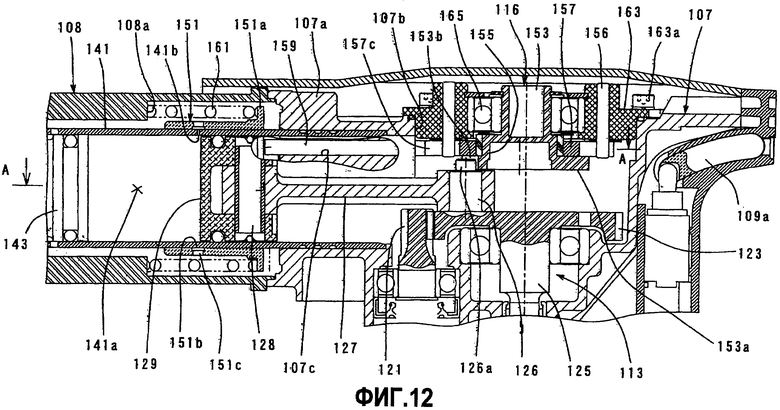
На фиг.12 показан вид в разрезе с увеличением, представляющий существенную часть молотка в открытом состоянии, вентиляционное отверстие для воздуха воздушной камеры открыто.
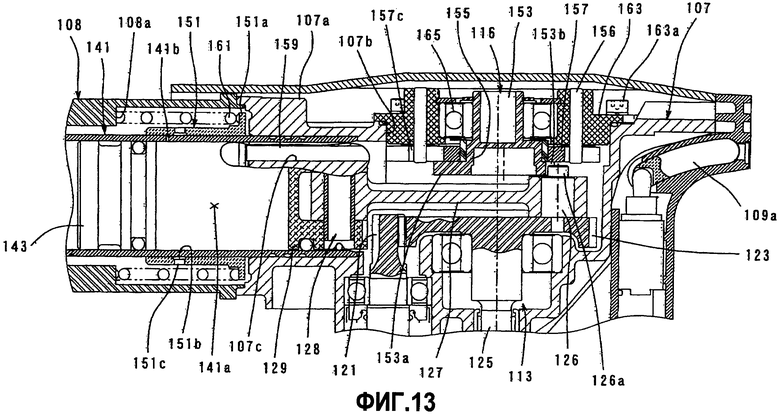
На фиг.13 показан вид в разрезе с увеличением, представляющий существенную часть молотка в закрытом состоянии, вентиляционное отверстие для воздуха воздушной камеры закрыто.
На фиг.14 показан вид в разрезе вдоль линии А-А на фиг.12.
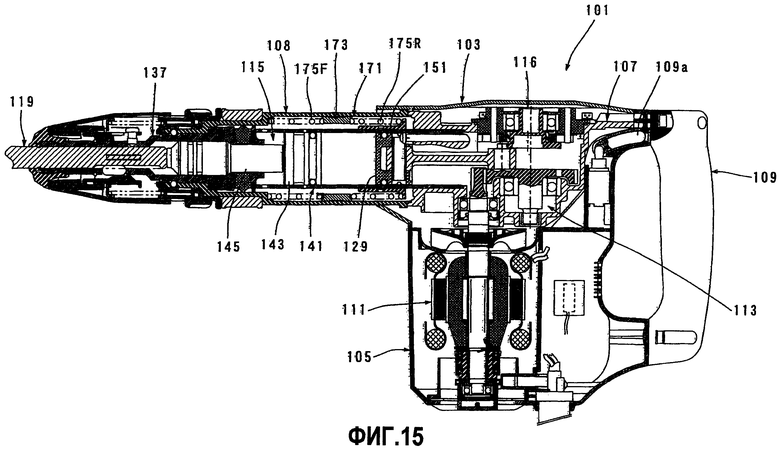
На фиг.15 показан вид сборку в разрезе, схематично представляющий весь электрический молоток в соответствии с четвертым вариантом воплощения настоящего изобретения.
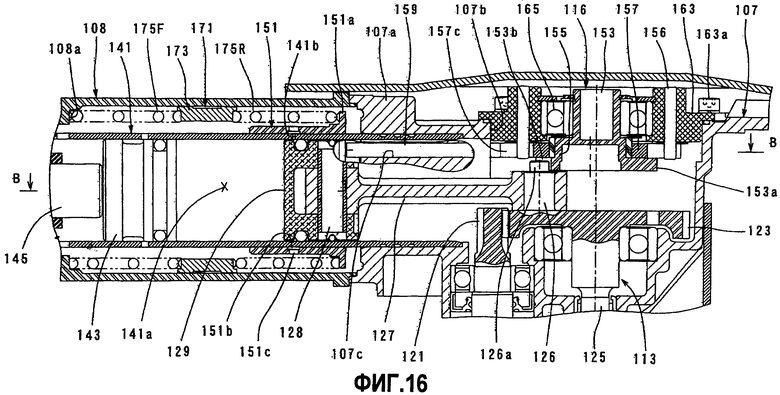
На фиг.16 показан вид в разрезе с увеличением, представляющий существенную часть молотка.
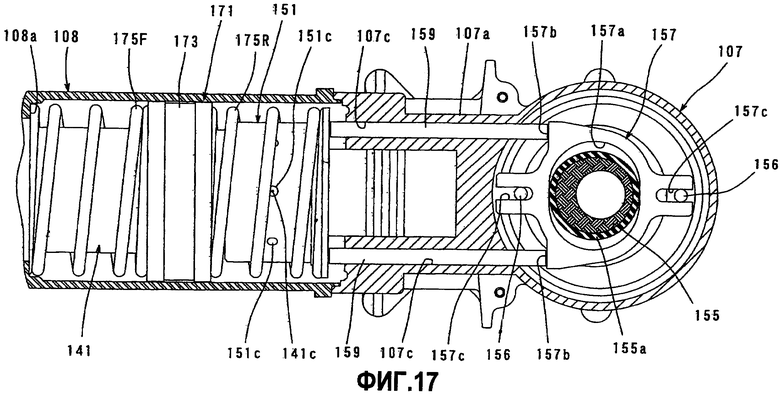
На фиг.17 показан вид в разрезе вдоль линии B-B на фиг.16.
Подробное описание изобретения
Каждый из дополнительных признаков и этапов способа, раскрытых выше и ниже, можно использовать по отдельности или совместно с другими признаками и этапами способа для получения и изготовления улучшенных ударных инструментов и способа использования таких ударных инструментов и устройств, используемых в них. Представленные примеры настоящего изобретения, причем в этих примерах совместно используется множество таких дополнительных признаков и этапов способа, будут подробно описаны ниже со ссылкой на чертежи. Подробное описание изобретения предназначено только для пояснения для специалиста в данной области техники дополнительных деталей, для выполнения на практике предпочтительных аспектов настоящего описания, и не предназначены для ограничения объема изобретения. Только формула изобретения определяет объем заявленного изобретения. Поэтому комбинации признаков и этапов, раскрытых в следующем подробном описании изобретения, могут быть необязательными для воплощения на практике изобретения в наиболее широком смысле, и вместо этого представлены исключительно для конкретного описания некоторых представительных примеров изобретения, подробное описание которого будет приведено ниже со ссылкой на прилагаемые чертежи.
Первый вариант воплощения изобретения
Первый вариант воплощения настоящего изобретения будет описан ниже со ссылкой на фиг.1-7.
На фиг.1 показан электрический молоток 101, как вариант воплощения ударного инструмента в соответствии с настоящим изобретением. На фиг.2, 4 и 6 показаны виды с увеличением в разрезе, каждый из которых представляет существенную часть молотка. На фиг.2 показано состояние, в котором муфта скольжения, предназначенная для принудительного движения устройства динамического снижения вибрации находится, по существу, в промежуточном положении. На фиг.4 и 5 показано состояние, в котором муфта скольжения находится в переднем конечном положении, и на фиг.6 и 7 показано состояние, в котором муфта скольжения находится в заднем конечном положении.
Как показано на фиг.1, молоток 101 в данном варианте воплощения включает в себя корпус 103, ударное 119 долото, соединенное с возможностью отсоединения в области оконечной головки (с левой стороны, если смотреть на фиг.1) корпуса 103 через держатель 137 инструмента, и ручку 109, соединенную с корпусом 103 на стороне, противоположной ударному 119 долоту, которую может удерживать пользователь. Корпус 103 и ударное 119 долото представляют собой элементы, которые соответствуют "корпусу инструмента" и "долоту", соответственно, в соответствии с настоящим изобретением. Ударное 119 долото удерживается держателем 137 инструмента и может выполнять возвратно-поступательные движения относительно держателя 137 инструмента в его осевом направлении, и при этом предотвращается его вращение относительно держателя 137 инструмента в направлении его окружности. В настоящем варианте воплощения, с целью удобства пояснения, сторона ударного 119 долота принята как передняя сторона, и сторона ручки 109 принята как задняя сторона.
Корпус 103 включает в себя корпус 105 двигателя, в котором установлен двигатель 111 привода, и корпус 107 зубчатой передачи, в котором установлен первый механизм 113 преобразования движения и второй механизм 116 преобразования движения, и цилиндрический корпус 108, в котором установлен ударный механизм 115. Вращающийся выход двигателя 111 привода соответствующим образом преобразуется в линейное движение с использованием первого механизма 113 преобразования движения, и передается на ударный элемент 115. Затем ударная сила создается в осевом направлении ударного 119 долота через ударный элемент 115. Кроме того, вращающийся выход двигателя 111 привода передается на второй механизм 116 преобразования движения через первый механизм 113 преобразования движения, и преобразуется в линейное движение с помощью второго механизма 116 преобразования движения. Линейное движение затем используется как приводная сила, предназначенная для принудительной вибрации устройства 171 динамического снижения вибрации, которое будет описано ниже. Первый механизм 113 преобразования движения и ударный механизм 115 представляют собой свойства, которые соответствуют "приводному механизму", и второй механизм 116 преобразования движения соответствует "механизму механической вибрации" в соответствии с настоящим изобретением. Двигатель 111 привода представляет собой признак, который соответствует "двигателю" в соответствии с настоящим изобретением. Кроме того, ползунковый переключатель 109a предусмотрен на ручке 109, и пользователь может передвигать его для включения двигателя 111 привода.
Как показано на фиг.2, первый механизм 113 преобразования движения включает в себя приводящее зубчатое колесо 121, которое вращается в горизонтальной плоскости под действием двигателя 111 привода (фиг.1), первый кривошипный вал 125, интегрально соединенный с приводимым зубчатым колесом 123, которое соединено с приводящим зубчатым колесом 121, соединительный элемент в форме плеча 127 кривошипа, который свободно соединен на одном его конце с первым кривошипным валом 125 через эксцентричную шпильку 126 в положении, смещенном на заданном расстоянии от центра вращения первого кривошипного вала 125, и приводящий элемент в форме поршня 129, установленный на другом конце плеча 127 кривошипа через соединительный вал 128. Первый кривошипный вал 125, эксцентричная шпилька 126, плечо 127 кривошипа и поршень 129 формируют первый кривошипно-шатунный механизм.
Ударный механизм 115 включает в себя ударный элемент в форме ударника 143, который установлен с возможностью скольжения внутри отверстия цилиндра 141, и промежуточный элемент в форме ударного стержня 145, который установлен с возможностью скольжения внутри держателя 137 инструмента, и передает кинетическую энергию ударника 143 к ударному 119 долоту. Воздушная камера 141a образована между поршнем 129 и ударником 143 в цилиндре 141. Ударник 143 приводится в движение под действием пневмопружины воздушной камеры 141a цилиндра 141, которая образуется в результате скользящего движения поршня 129. Ударник 143 затем сталкивается с (ударяет) промежуточным элементом в форме ударного стержня 145, который установлен с возможностью скольжения внутри держателя 137 инструмента, и передает ударную силу к ударному 119 долоту через ударный стержень 145. Цилиндр 141 расположен коаксиально с ударным 119 долотом. Поэтому поршень 129 и ударник 143 движутся линейно вдоль той же оси, что и ударное 119 долото. Кроме того, цилиндр 141 вставлен спереди в отверстие цилиндрического участка 107a удержания цилиндра, который сформирован в передней области корпуса 107 зубчатой передачи и удерживается там, и установлен внутри цилиндрического корпуса 108, соединенного с корпусом 107 зубчатой передачи.
Устройство 171 динамического снижения вибрации, которое понижает вибрацию корпуса 103 во время ударного действия, и второй механизм 116 преобразования движения, который принудительно осуществляет вибрацию устройства 171 динамического снижения вибрации путем активного привода в движение груза 173 устройства 171 динамического снижения вибрации, будут описаны ниже. В данном описании принудительная вибрация устройства 171 динамического снижения вибрации называется принудительной вибрацией. Устройство 171 динамического снижения вибрации предусмотрено во внутреннем пространстве цилиндрического корпуса 108 и, в основном, включает в себя цилиндрический груз 173, установленный как кольцо снаружи цилиндра 141, и переднюю и заднюю пружины 175F, 175R смещения, которые расположены на передней и на задней сторонах груза 173 в осевом направлении ударного долота. Пружины 175F, 175R смещения представляют собой признак, который соответствует "упругому элементу" в соответствии с настоящим изобретением. Передняя и задняя пружины 175F, 175R смещения передают силу пружины на груз 173 в направлении друг к другу, когда груз 173 движется в осевом направлении ударного 119 долота.
Груз 173 расположен таким образом, что его центр (центр тяжести) совпадает с осью ударного 119 долота, и может свободно скользить так, что внешняя поверхность его стенки удерживается в контакте с внутренней поверхностью стенки (цилиндрической поверхностью) цилиндрического корпуса 108. Кроме того, передняя и задняя пружины 175F, 175R смещения сформированы в результате сжатия спиральных пружин и, так же, как груз 173, они установлены таким образом, что каждый из их центров совпадает с осью ударного 119 долота. Один конец (задний конец) задней пружины 175R смещения удерживается в контакте с передней поверхностью фланца 151a муфты 151 скольжения, в то время как другой конец (передний конец) удерживается в контакте с осевым задним концом груза 173. Кроме того, один конец (задний конец) передней пружины 175F смещения удерживается в контакте с осевым передним концом груза 173, в то время как другой конец (передний конец) удерживается в контакте со ступенчатой поверхностью 108a цилиндрического корпуса 108.
Муфта 151 скольжения формирует входной элемент, который подводит силу привода второго механизма 116 преобразования движения к грузу 173 через заднюю пружину 175R смещения. Муфта 151 скольжения установлена на цилиндре 141 таким образом, что она может скользить в осевом направлении ударного долота, и муфта 151 скольжения скользит под действием второго механизма 116 преобразования движения. Муфта 151 скольжения представляет собой свойство, которое соответствует "элементу скольжения" в соответствии с настоящим изобретением. Вентиляционное отверстие 141b сформировано в цилиндре 141 для регулирования давления в камере 141a для воздуха и обеспечивает сообщение между камерой 141a для воздуха и внешней атмосферой. Поскольку муфта 151 скольжения, установленная на цилиндре 141, постоянно закрывает вентиляционное отверстие 141b, муфта 151 скольжения включает в себя кольцевое пространство 151b, постоянно сообщенное с отверстием 141b вентиляции воздуха, и множеством сообщающих отверстий 151c, проходящих радиально через муфту 151 скольжения и обеспечивающих сообщение между пространством 151b и внешней атмосферой.
Второй механизм 116 преобразования движения расположен над первым механизмом 113 преобразования движения. Как показано на фиг.2-7, второй механизм 116 преобразования движения, в основном, включает в себя второй кривошипный вал 153, который приводится во вращение в горизонтальной плоскости в результате вращения эксцентричной шпильки 126 первого механизма 113 преобразования движения, эксцентричный участок 155 вала, который сформирован интегрально со вторым кривошипным валом 153, соединительную пластину 157, которая приводится в возвратно-поступательное движение в осевом направлении ударного долота в результате движения эксцентричного участка 155 вала, и приводной элемент в форме правого и левого прямых стержней 159, которые движутся линейно вместе с соединительной пластиной 157, и приводят в движение муфту 151 скольжения в направлении вперед. Второй кривошипный вал 153, эксцентричный участок 155 вала и соединительная пластина 157 формируют второй кривошипно-шатунный механизм, который представляет собой признак, соответствующий "второму кривошипно-шатунному механизму" в соответствии с настоящим изобретением.
Второй кривошипный вал 153 коаксиально расположен противоположно первому кривошипному валу 125. Второй кривошипный вал 153 имеет участок 153a в форме диска на его нижней оконечности вдоль оси. Выемка (канавка) 153b сформирована на нижней поверхности участка 153a в форме диска в положении, смещенном от центра вращения второго кривошипного вала 153. Выемка 153b соединена с выступающим концом 126a эксцентричной шпильки 126 первого механизма 113 преобразования движения. Выемка 153b и выступающий конец 126a соответствуют "вогнутому участку" и "выпуклому участку", соответственно, в соответствии с настоящим изобретением. В частности, второй кривошипный вал 153 приводится во вращение с помощью приводной силы, которую подают от первого кривошипного вала 125 через соединение между выемкой 153b и выступающим концом 126. Отверстие 107b, предназначенное для установки первого механизма 113 преобразования движения, сформировано в корпусе 107 зубчатой передачи над первым механизмом 113 преобразования движения. Второй кривошипно-шатунный механизм установлен на крышке 163 кривошипа, которая установлена с возможностью съема в отверстие 107b. Крышка 163 кривошипа соответствует "закрывающему элементу" в соответствии с настоящим изобретением.
Второй кривошипный вал 153 установлен с возможностью вращения на крышке 163 кривошипа через подшипник 165. Эксцентричный участок 155 вала имеет круглую форму, центр которого смещен на заданное расстояние от центра вращения второго кривошипного вала 153. Соединительная пластина 157 соединена с кольцом 155a, установленным на эксцентричном участке 155 вала, через эллиптическое отверстие 157a, удлиненное в направлении, противоположном осевому направлению ударного долота. Кроме того, соединительная пластина 157 направляется передним и задним направляющими штифтами 156, установленными на крышке 163 кривошипа таким образом, что они линейно движутся в осевом направлении ударного долота. Передняя и задняя направляющие канавки 157c сформированы в соединительной пластине 157 и проходят в осевом направлении ударного долота, и направляющие канавки 157c соединены с возможностью скольжения с соответствующими направляющими штифтами 156. Как показано на фиг.4, правый и левый стержни 159 установлены с возможностью скольжения в соответствующих направляющих отверстиях 107c, которые сформированы на участке 107a удержания цилиндра корпуса 107 зубчатого колеса в осевом направлении ударного долота. Один осевой конец (задний конец) каждого из стержней 159 удерживается в контакте с плоской передней поверхностью 157b соединительной пластины 157, в то время как другой осевой конец (передний конец) удерживается в контакте с задней оконечной поверхностью муфты 151 скольжения.
Второй кривошипный вал 153 и соединительная пластина 157, которые формируют второй кривошипно-шатунный механизм, установлены на крышке 163 кривошипа перед тем, как крышка 163 кривошипа будет установлена в отверстии 107b корпуса 107 зубчатой передачи. Соединительная пластина 157 удерживается между внутренней поверхностью стенки крышки 163 кривошипа и дискообразным участком 153a второго кривошипного вала 153 таким образом, что предотвращается движение соединительной пластины 157 в осевом направлении второго кривошипного вала 153 (в вертикальном направлении). Крышка 163 кривошипа со вторым кривошипным валом 153 и соединительной пластиной 157, установленными на ней, установлена в отверстие 107b снаружи (сверху) корпуса 107 зубчатой передачи и закреплена на корпусе 107 зубчатой передачи с помощью множества винтов 163a. В это время выемка 153b, сформированная на дискообразном участке 153a второго кривошипного вала 153, соединяется с выступающим концом 126a эксцентричной шпильки 126 первого кривошипно-шатунного механизма, который уже установлен в корпусе 107 зубчатой передачи, и задний конец стержня 159 введен в контакт с передней поверхностью 157b соединительной пластины 157. Таким образом, первый и второй кривошипно-шатунные механизмы собраны, будучи механически взаимно соединенными таким образом, что может быть передана сила вращения.
Работа молотка 101, имеющего описанную выше конструкцию, поясняется ниже. Когда двигатель 111 привода (показан на фиг.1) приводится в движение, вращение на выходе двигателя 111 привода обеспечивает вращение приводящего зубчатого колеса 121 в горизонтальной плоскости. Когда приводящее зубчатое колесо 121 вращается, первый кривошипный вал 125 вращается в горизонтальной плоскости через приводимое зубчатое колесо 123, соединенное с приводящим зубчатым колесом 121. Затем выполняется линейное скольжение поршня 129 внутри цилиндра 141 через плечо 127 кривошипа. Таким образом, ударник 143 совершает возвратно-поступательные движения внутри цилиндра 141 и сталкивается (ударяет) с ударным стержнем 145 в результате действия функции воздушной пружины внутри цилиндра 141, в результате скользящего движения поршня 129. Кинетическая энергия ударника 143, возникающая в результате столкновения со стержнем 145, передается на ударное 119 долото. Таким образом, ударное 119 долото выполняет ударное движение в осевом направлении, и выполняется работа молотка в отношении обрабатываемой детали.
Во время описанной выше работы молотка (когда осуществляется привод в движение ударного 119 долота), импульсная и циклическая вибрация возникает внутри корпуса 103 в осевом направлении ударного долота. Основная вибрация корпуса 103, которую требуется уменьшить, представляет собой силу реакции сжатия, которая формируется, когда поршень 129 и ударник 143 сжимают воздух в воздушной камере 141a, и силу реакции удара, которая формируется через незначительную задержку времени после силы реакции сжатия, когда ударник 143 ударяет об ударное 119 долото через ударный стержень 145.
В устройстве 171 динамического снижения вибрации в соответствии с настоящим вариантом воплощения груз 173 и пружины 175F, 175R смещения используются как элементы снижения вибрации в устройстве 171 динамического снижения вибрации и взаимодействуют для уменьшения вибрации корпуса 103 молотка 101. Таким образом, упомянутая выше вибрация, которая формируется в корпусе 103 молотка 101, может быть эффективно уменьшена.
При некоторых фактически выполняемых операциях пользователь сильно прижимает молоток 101 к обрабатываемой детали таким образом, что значительная нагрузка прикладывается к ударному 119 долоту со стороны обрабатываемой детали. Поэтому, хотя чрезвычайно требуется уменьшить вибрацию, величина вибрации, передаваемой в устройство 171 динамического снижения вибрации, может быть ограничена.
При выполнении работы такого типа вибрация корпуса 103 может быть более эффективно уменьшена с помощью принудительной вибрации устройства 171 динамического снижения вибрации. В частности, в данном варианте воплощения, во время ударного действия, когда первый кривошипный вал 125 вращается, второй кривошипный вал 153, соединенный с выступающим концом 126a эксцентричной шпильки 126 через выемку 153b, принудительно вращается с той же скоростью, что и первый кривошипный вал 125. Когда участок 155 эксцентричного вала второго кривошипного вала 153 вращается в горизонтальной плоскости, соединительная пластина 157, соединенная с эксцентричным участком 155 вала, принудительно совершает возвратно-поступательные движения в осевом направлении ударного 119 долота. Когда соединительная пластина 157 движется вперед, муфта 151 скольжения выталкивается вперед через стержни 159, и она сжимает пружины 175F, 175R смещения. С другой стороны, когда соединительная пластина 157 движется назад, муфта 151 скольжения выталкивается назад под действием силы пружины пружин 175F, 175R смещения. На фиг.2 и 3 показано состояние, в котором муфта 151 скольжения, которая движется в продольном направлении, по существу, находится в ее промежуточном положении. На фиг.4 и 5 показано состояние, в котором муфта 151 скольжения находится в ее переднем оконечном положении, и на фиг.6 и 7 показано состояние, в котором муфта 151 скольжения находится в ее заднем оконечном положении. В частности, во время ударного действия груз 173 устройства 171 динамического снижения вибрации активно приводится в движение через пружины 175F, 175R смещения и обеспечивает принудительную вибрацию устройства 171 динамического снижения вибрации.
Таким образом, устройство 171 динамического снижения вибрации используется как активный механизм уменьшения уровня вибрации, в котором груз 173 активно приводится в движение. Поэтому вибрация, которая формируется в корпусе 103 во время ударного действия, может быть дополнительно эффективно уменьшена или понижена. В результате может быть обеспечена функция существенного уменьшения уровня вибрации даже во время выполнения операций такого типа, в которых, хотя понижение вибрации чрезвычайно требуется, только малое количество вибрации попадает в устройство 171 динамического снижения вибрации, и устройство 171 динамического снижения вибрации работает не существенно, в частности, например, во время ударного действия, которую выполняют, когда пользователь прикладывают большую силу к корпусу 103 (сила прижима ударного 119 долота к заготовке).
В этом варианте воплощения элемент приема пружины, в форме муфты 151 скольжения, приводится в движение через второй кривошипно-шатунный механизм, который сформирован участком 155 эксцентричного вала и соединительной пластиной 157, и груз 173 активно приводят в движение через заднюю пружину 175R смещения. При использовании такой конструкции время привода груз 173 относительно времени привода поршня 129 (ударника 143) первым кривошипно-шатунным механизмом, или фазу кривошипа второго кривошипно-шатунного механизма можно регулировать таким образом, что, когда ударник 143 вынужденно движется вперед в результате флуктуации давления в воздушной камере 141a и ударяет ударное 119 долото через ударный стержень 145, груз 173 устройства 171 динамического снижения вибрации противодействует импульсной вибрации, вызванной в корпусе 103, или линейно движется в направлении, противоположном промежуточной области либо одной, или двух из упомянутых выше силы реакции сжатия и силы реакции удара, образующейся немедленно после силы реакции сжатия. В результате, линейное движение груза 173 может быть синхронизировано по времени так, что оно будет совпадать с созданием большой величины вибрации во время ударного действия, таким образом, что функция уменьшения вибрации груза 173 может выполняться оптимальным образом.
Кроме того, в данном варианте воплощения груз 173 и пружины 175F, 175R смещения, которые формируют устройство 171 динамического снижения вибрации, установлены кольцеобразно снаружи цилиндра 141. При такой конструкции пространство между внешней стенкой цилиндра 141 и внутренней стенкой цилиндрического корпуса 108 может эффективно использоваться для размещения механизма уменьшения вибрации, что позволяет эффективно уменьшить размер электрического молотка 101. Кроме того, при кольцевой компоновке груз 173 и пружины 175F, 175R смещения могут быть расположены таким образом, что их центры тяжести будут размещены на оси ударного 119 долота. В результате может быть предотвращено действие силы реакции (силы боковой или вертикальной реакции вокруг оси, проходящей поперечно осевому направлению ударному долоту) на корпус 103, когда груз 173 совершает возвратно-поступательные движения в осевом направлении ударного 119 долота.
Кроме того, в данном варианте воплощения груз 173 может скользить в осевом направлении ударного 119 долота вдоль внутренней поверхности стенки цилиндрического корпуса 108. При такой конструкции скользящее движение груза 173 может быть стабилизировано. Кроме того, груз 173 может быть установлен так, что он не будет находиться в контакте с внешней поверхностью стенки цилиндра 141. Таким образом, можно исключить отрицательное влияние груза 173 на вентиляционное отверстие 141b для воздуха, которое сформировано в цилиндре 141, для обеспечения сообщения между воздушной камерой 141a и внешней стороной.
Кроме того, в данном варианте выполнения, крышка 163 кривошипа установлена в отверстие 107b для закрытия отверстия 107b корпуса 107 зубчатой передачи, и второй кривошипный вал 153 и соединительная пластина 157, которые формируют второй кривошипно-шатунный механизм, установлены на крышке 163 кривошипа. Кроме того, когда крышка 163 кривошипа установлена в отверстие 107b, выемка 153b, сформированная на дискообразном участке 153a второго кривошипного вала 153, соединяется с выступающим концом 126a эксцентричной шпильки 126 первого кривошипного вала 125 таким образом, что второй кривошипно-шатунный механизм механически взаимно соединен с первым кривошипно-шатунным механизмом. При использовании такой конструкции второй кривошипно-шатунный механизм может быть установлен просто путем установки крышки 163 кривошипа в отверстие 107b. Таким образом, в соответствии с данным вариантом воплощения упрощаются установка второго кривошипно-шатунного механизма и сборка устройства.
В данном варианте воплощения, в котором второй кривошипный вал 153 и соединительная пластина 157, формирующие второй кривошипно-шатунный механизм, установлены на крышке 163 кривошипа, крышка кривошипа, предназначенная исключительно для закрытия отверстия 107b, или крышка кривошипного механизма без второго кривошипно-шатунного механизма, может быть установлен вместо крышки 163 кривошипа со вторым кривошипно-шатунным механизмом. Таким образом, может быть легко реализован переход от молотка 101 с устройством 171 динамического снижения вибрации к модели низкого уровня без устройства 171 динамического снижения вибрации.
Кроме того, отверстие 107b, сформированное в корпусе 107 зубчатой передачи, предусмотрено для установки первого кривошипно-шатунного механизма в корпусе 107 зубчатой передачи. Кроме того, верхняя область, расположенная над первым кривошипно-шатунным механизмом, присутствует как свободное пространство. В этом варианте воплощения второй кривошипно-шатунный механизм установлен в результате использования свободного пространства таким образом, что второй кривошипно-шатунный механизм может быть установлен без изменения внешних размеров существующего электрического молотка 101.
Кроме того, муфта 151 скольжения, которая установлена с возможностью скольжения на цилиндре 141, имеет цилиндрический корпус, удлиненный в осевом направлении ударного долота или в направлении скольжения. При такой конструкции скользящее движение муфты 151 скольжения может быть стабилизировано. В результате, может быть получена простая конструкция, в которой стержни 159 толкают муфту 151 скольжения.
Второй вариант воплощения изобретения
Второй вариант воплощения настоящего изобретения будет описан ниже со ссылкой на фиг.8-10.
На фиг.8 показан вид в разрезе, представляющий весь электрический молоток 101 в соответствии с данным вариантом воплощения. На фиг.9 показан вид в разрезе с увеличением, представляющий существенную часть молотка. На фиг.10 показан вид в разрезе вдоль линии D-D, обозначенной на фиг.9. Данный вариант воплощения представляет собой модификацию механизма механической вибрации, предназначенного для принудительной вибрации устройства 171 динамического снижения вибрации в электрическом молотке 101, который имеет устройство 171 динамического снижения вибрации, которое уменьшает вибрацию корпуса 103. В таком варианте воплощения принудительная вибрация устройства 171 динамического снижения вибрации осуществляется с помощью второго кривошипно-шатунного механизма, установленного на механизме 213 преобразования движения, который осуществляет привод ударника 143, и второй механизм 116 преобразования движения, в упомянутом выше первом варианте воплощения, здесь не используется. В остальном отношении устройство имеет такую же конструкцию, как и в первом варианте воплощения. Компоненты или элементы в данном варианте воплощения, которые, по существу, идентичны компонентам или элементам в соответствии с первым вариантом воплощения, обозначены теми же номерами ссылочных позиций, что и в первом варианте воплощения, и не будут описаны здесь или будут описаны только кратко.
Механизм 213 преобразования движения, в соответствии с данном вариантом воплощения, включает в себя первый кривошипно-шатунный механизм, который выполняет привод ударника 143, и второй кривошипно-шатунный механизм, который осуществляет привод устройства 171 динамического снижения вибрации. Первый кривошипно-шатунный механизм, в основном, включает в себя приводящее зубчатое колесо 221, которое вращается в горизонтальной плоскости от двигателя 111 привода (фиг.8), приводимое зубчатое колесо 223, которое соединено с приводящим зубчаты колесом 221, кривошипный вал 225, который вращается вместе с приводимым зубчатым колесом 223, кривошипную пластину 225a, которая сформирована как единая деталь с верхним концом кривошипного вала 225, соединительный элемент в форме плеча 227 кривошипного механизма, которое свободно соединено на его одном конце с кривошипной пластиной 225a через эксцентричную шпильку 226 в положении, смещенном на заданное расстояние от центра вращения кривошипной пластины 225a, и приводящий элемент в форме поршня 229, установленный на другом конце плеча 227 кривошипа через соединительный вал 228. Второй кривошипно-шатунный механизм, в основном, включает в себя участок 255 эксцентричного вала, сформированный как единая деталь с кривошипным валом 225, соединительную пластину 257, которая выполняет возвратно-поступательные движения в осевом направлении ударного 119 долота в результате вращения участка 255 эксцентричного вала, и приводной элемент в форме правого и левого прямых стержней 259, которые линейно движутся вместе с соединительной пластиной 257, и которые приводят в движение муфту 151 скольжения в направлении вперед.
Участок 255 эксцентричного вала имеет круглую форму, центр которой смещен на заданное расстояние от центра вращения кривошипного вала 225. Соединительная пластина 257 соединена с кольцом 255a, которое установлено на участке 255 эксцентричного вала через эллиптическое отверстие 257a, которое выполнено удлиненным в направлении, поперечном осевому направлению ударного долота. Кроме того, соединительная пластина 257 направляется передним и задним направляющими штифтами 256, установленными на корпусе 107 зубчатой передачи таким образом, что они выполняют линейное движение. Кроме того, передняя и задняя направляющие канавки 257c сформированы в соединительной пластинке 257 и проходят в осевом направлении ударного долота, и направляющие канавки 257c соединены с возможностью скольжения с соответствующими направляющими штифтами 256. Как показано на фиг.10, правый и левый стержни 259 установлены с возможностью скольжения в соответствующие направляющие отверстия 107c, которые сформированы через участок 107a удержания цилиндра корпуса 107 зубчатой передачи в осевом направлении ударного долота. Один осевой конец (задний конец) каждого стержня 259 удерживается в контакте с плоской передней поверхностью 257b соединительной пластины 257, в то время как другой осевой конец (передний конец) удерживается в контакте с поверхностью заднего конца муфты 151 скольжения устройства 171 динамического снижения вибрации. Отверстие 107b сформировано в корпусе 107 зубчатой передачи над механизмом 213 преобразования движения и закрыто крышкой 263 кривошипа, которая закреплена с возможностью съема на корпусе 107 зубчатой передачи с помощью винтов 263a.
В соответствии с данным вариантом воплощения, который имеет описанную выше конструкцию, так же, как и первом варианте воплощения, во время ударного действия, выполняемого с помощью ударного 119 долота, груз 173 активно приводится в движение через пружины 175F, 175R смещения, в результате линейного движения муфты 151 скольжения, через второй кривошипно-шатунный механизм. В частности, вибрация, создаваемая в корпусе 103 в осевом направлении ударного долота во время ударного действия, может эффективно понижаться или может ослабляться в результате вынужденной вибрации устройства 171 динамического снижения вибрации. В частности, в механизме 213 преобразования движения, в соответствии с данным вариантом воплощения, второй кривошипно-шатунный механизм, который принудительно генерирует вибрацию устройства 171 динамического снижения вибрации, установлен на первом кривошипно-шатунном механизме, который осуществляет привод ударника 143. В частности, участок 255 эксцентричного вала расположен на кривошипном валу 225, и муфта 151 скольжения приводятся в движение соединительной пластиной 257, которая соединятся с участком 255 эксцентричного вала через стержни 259. При использовании такой конструкции, в соответствии с данным вариантом воплощения, количество деталей, используемых для привода в движение муфты 151 скольжения, может быть уменьшено по сравнению с первым вариантом воплощения.
Кроме того, в описанных выше вариантах воплощения, электрический молоток 101 описан как пример ударного инструмента. Однако, естественно, настоящее изобретение также можно применять в бурильном молотке, в котором ударное 119 долото может выполнять ударное движение в его осевом направлении при одновременном вращении вокруг его оси.
Третий вариант воплощения изобретения
Третий вариант воплощения настоящего изобретения будет описан ниже со ссылкой на фиг.11-14.
На фиг.11 показан электрический молоток 101, в качестве варианта воплощения ударного инструмента в соответствии с настоящим изобретением. На фиг.12 и 13 представлены виды в разрезе с увеличением, на каждом из которых показана существенная часть молотка, в открытом состоянии и в закрытом состоянии отверстия для воздуха воздушной камеры, соответственно. На фиг.14 показан вид в разрезе вдоль линии А-А, обозначенной на фиг.12.
Как показано на фиг.11, молоток 101 в данном варианте воплощения включают в себя корпус 103, ударное 119 долото, соединенное с возможностью отсоединения с областью оконечности (с левой стороны на фиг.11) корпуса 103 через держатель 137 инструмента, и ручкой 109, которая соединена с корпусом 103 на стороне, противоположной ударному 119 долоту, и которая разработана с возможностью удержания ее пользователем. Корпус 103 и ударное 119 долото представляют собой признаки, которые соответствуют "корпусу инструмента" и "долоту", соответственно, в соответствии с настоящим изобретением. Ударное 119 долото удерживается держателем 137 инструмента таким образом, что обеспечивается возможность его возвратно-поступательного движения относительно держателя 137 инструмента в осевом направлении, и предотвращается его вращение относительно держателя 137 инструмента в направлении его окружности. В настоящем варианте воплощения, для удобства пояснения, сторона ударного 119 долота принята как передняя сторона и сторона ручки 109 принята как задняя сторона.
Корпус 103 включает в себя корпус 105 для двигателя, в котором установлен двигатель 111 привода, и корпус 107 зубчатой передачи, в котором установлен первый механизм 113 преобразования и второй механизм 116 преобразования движения, и цилиндрический корпус 108, в котором установлен ударный механизм 115. Вращение на выходе двигателя 111 привода соответствующим образом преобразуется в линейное движение через первый механизм 113 преобразования движения и передается к ударному элементу 115. Затем создается ударная сила в осевом направлении ударного 119 долота через ударный элемент 115. Кроме того, вращение на выходе двигателя 111 привода передается ко второму механизму 116 преобразования движения через первый механизм 113 преобразования движения и преобразуется в линейное движение с помощью второго механизма 116 преобразования движения. Линейное движение передают к муфте 151 скольжения, которая открывает и закрывает отверстие 141b для воздуха воздушной камеры 141a, которое будет описано ниже, в качестве силы привода, для привода в скользящее движение муфты 151 скольжения. Двигатель 111 привода представляет собой элемент, который соответствует "двигателю" в соответствии с настоящим изобретением. Кроме того, ползунковый переключатель 109a предусмотрен на ручке 109, и пользователь может перемещать этот переключатель для управления двигателем 111 привода.
Как показано на фиг.12 и 13, первый механизм 113 преобразования движения включает в себя приводящее зубчатое колесо 121, которое вращается в горизонтальной плоскости от двигателя 111 привода (фиг.11), первый кривошипный вал 125, соединенный с приводимым зубчатым колесом 123, который соединен с приводящим зубчатым колесом 121, соединительный элемент в форме плеча 127 кривошипа, которое свободно соединено на ее одном конце с первым кривошипным валом 125 через эксцентричную шпильку 126 в положении, смещенном на заданное расстояние от центра вращения первого кривошипного вала 125, и приводящий элемент в форме поршня 129, который установлен на другом конце плеча 127 кривошипа через соединительный вал 128. Первый кривошипный вал 125, эксцентричная шпилька 126, плечо 127 кривошипа и поршень 129 формируют первый кривошипно-шатунный механизм.
Как показано на фиг.11, ударный механизм 115 включает в себя ударный элемент в форме ударника 143, который установлен с возможностью скользящего движения в отверстии цилиндра 141, и промежуточный элемент в форме ударного стержня 145, который установлен с возможностью скольжения в держателе 137 инструмента, и который передает кинетическую энергию ударника 143 к ударному 119 долоту. Воздушная камера 141a образована между поршнем 129 и ударником 143 в цилиндре 141. Ударник 143 приводится в движение через действие пневмопружины воздушной камеры 141a цилиндра 141, которое образуется в результате скользящего движения поршня 129. Ударник 143 затем сталкивается с (ударяет) промежуточным элементом в форме ударного стержня 145, который установлен с возможностью скольжения в держателе 137 инструмента, и передает силу удара к ударному 119 долоту через ударный стержень 145. Цилиндр 141 расположен коаксиально с ударным 119 долотом. Поэтому поршень 129 и ударник 143 линейно движутся вдоль той же оси, что и ударное 119 долото. Кроме того, цилиндр 141 вставлен спереди в отверстие цилиндрического участка 107a удержания цилиндра, которое сформировано в передней области корпуса 107 зубчатой передачи, и удерживается в нем, и установлен в цилиндрическом корпусе 108, который соединен с корпусом 107 зубчатой передачи.
Воздушная камера 141a используется для привода ударника 143 под действием пневмопружины и сообщается с внешней средой через одно или больше вентиляционных отверстий 141b для воздуха, регулирующих давление, которые сформированы в цилиндре 141 и продолжаются в радиальном направлении через него. Вентиляционное отверстие 141b для воздуха представляет собой свойство, которое соответствует "части вентиляции" в соответствии с настоящим изобретением. Муфта 151 скольжения расположена снаружи цилиндра 141 и используется для того, чтобы открывать и закрывать вентиляционное отверстие 141b для воздуха. Муфта 151 скольжения представляет собой свойство, которое соответствует "элементу открывания и закрывания части вентиляции" в соответствии с настоящим изобретением. Муфта 151 скольжения установлена на цилиндре 141 таким образом, что она может скользить в осевом направлении ударного долота, и муфта скольжения 151 приводится в скользящее движение вторым механизмом 116 преобразования движения. Муфта 151 скольжения имеет кольцеобразную канавку 151b и множество связующих отверстий 151c. Кольцеобразная канавка 151b сформирована на внутренней поверхности стенки муфты 151 скольжения, имеющей заданную ширину в осевом направлении и проходящую в направлении окружности муфты 151 скольжения. Связующие отверстия 151c продолжаются радиально через муфту 151 скольжения таким образом, что обеспечивают связь между канавкой 151b и окружающей средой. Когда муфта 151 скольжения скользит по цилиндру 141 и размещается в области, в которой кольцеобразная канавка 151b обращена к вентиляционному отверстию 141b для воздуха цилиндра 141, муфта 151 скольжения открывает вентиляционное отверстие 141b для воздуха. С другой стороны, когда муфта 151 скольжения движется из области, в которой кольцеобразная канавка 151b обращена к вентиляционному отверстию 141b для воздуха, муфта 151 скольжения закрывает вентиляционное отверстие 141b для воздуха.
Второй механизм 116 преобразования движения расположен над первым механизмом 113 преобразования движения. Как показано на фиг.12-14, второй механизм 116 преобразования движения, в основном, включает в себя второй кривошипный вал 153, который приводится во вращение в горизонтальной плоскости в результате вращения эксцентричной шпильки 126 первого механизма 113 преобразования движения, участок 155 эксцентричного вала сформирован как единая деталь со вторым кривошипным валом 153, соединительный элемент в форме соединительной пластины 157, который обеспечивает возвратно-поступательное движение в осевом направлении ударного долота в результате вращения участка 155 эксцентричного вала, элемент привода в форме правого и левого стержней 159, которые движутся линейно вместе с соединительной пластиной 157 и которые перемещают муфту 151 скольжения вперед, и прижимная пружина 161, которая прижимает муфту 151 скольжения таким образом, чтобы муфта 151 скольжения передвигалась назад. Второй кривошипный вал 153, участок 155 эксцентричного вала и соединительная пластина 157 формируют второй кривошипно-шатунный механизм, который представляет собой свойство, которое соответствует "второму кривошипно-шатунному механизму" в соответствии с настоящим изобретением.
Второй кривошипный вал 153 расположен коаксиально напротив первого кривошипного вала 125. Второй кривошипный вал 153 имеет дискообразный участок 153a на нижнем конце его оси. Выемка (канавка) 153b сформирована на нижней поверхности дискообразного участка 153a в положении, смещенном от центра вращения второго кривошипного вала 153. Выемка 153b соединена с выступающим концом 126a эксцентричной шпильки 126 первого механизма 113 преобразования движения. Выемка 153b и выступающий конец 126a представляют собой признаки, которые соответствуют "вогнутому участку" и "выпуклому участку", соответственно, в соответствии с настоящим изобретением. В частности, второй кривошипный вал 153 приводится во вращательное движение под действием силы привода, которая поступает от первого кривошипного вала 125 в результате контакта между выемкой 153b и выступающим концом 126. Отверстие 107b, предназначенное для установки первого механизма 113 преобразования движения, сформировано в корпусе 107 зубчатой передачи над первым механизмом 113 преобразования движения. Второй кривошипно-шатунный механизм установлен на крышке 163 кривошипа, которая съемно установлена в отверстие 107b. Крышка 163 кривошипа представляет собой признак, который соответствует "закрывающему элементу" в соответствии с настоящим изобретением.
Второй кривошипный вал 153 установлен с возможностью вращения на крышке 163 кривошипа через подшипник 165. Участок 155 эксцентричного вала имеет круглую форму, центр которой смещен на заданное расстояние от центра вращения второго кривошипного вала 153. Соединительная пластина 157 соединена с кольцом 155a, которое установлено на участке 155 эксцентричного вала, через эллиптическое отверстие 157a, выполненное удлиненным в направлении, поперечном осевому направлению ударного долота. Кроме того, соединительная пластина 157 направляется передним и задним направляющими штифтами 156, установленными на крышке 163 кривошипа таким образом, что они линейно движутся в осевом направлении ударного долота. Кроме того, передняя и задняя направляющие канавки 157c сформированы в соединительной пластине 157 и проходят в осевом направлении вставки, и направляющие канавки 157c соединены с возможностью скольжения с соответствующими направляющими штифтами 156. Как показано на фиг.14, правый и левый стержни 159 установлены с возможностью скольжения в соответствующие направляющие отверстия 107c, которые сформированы через участок 107a удержания цилиндра корпуса 107 зубчатой передачи в осевом направлении вставки молотка. Один осевой конец (задний конец) каждого стержня 159 удерживается в контакте с плоской передней поверхностью 157b соединительной пластины 157, в то время как другой осевой конец (передний конец) удерживается в контакте с задней конечной поверхностью муфты 151 скольжения. Прижимная пружина 161 представляет собой спиральную пружину, расположенную снаружи муфты 151 скольжения. Один осевой конец (задний конец) прижимной пружины 161 удерживается в контакте с фланцем 151a муфты 151 скольжения, в то время как другой осевой конец (передний конец) удерживается в контакте со ступенчатой поверхностью 108a цилиндрического корпуса 108.
Второй кривошипный вал 153 и соединительная пластина 157, которые формируют второй кривошипно-шатунный механизм, установлены на крышке 163 кривошипа, перед тем, чем как крышка 163 кривошипа будет установлена в отверстии 107b корпуса 107 зубчатой передачи. Соединительная пластина 157 удерживается между внутренней поверхностью стенки крышки 163 кривошипа и дискообразным участком 153a второго кривошипного вала 153, таким образом, что предотвращается движение соединительной пластины 157 в осевом направлении второго кривошипного вала 153. Крышка 163 кривошипа со вторым кривошипным валом 153 и соединительной пластиной 157, установленной на нем, установлена поверх отверстия 107b снаружи (сверху) корпуса 107 зубчатой передачи и закреплена на корпусе 107 зубчатой передачи с помощью множества винтов 163a. При этом выемка 153b, сформированная на дискообразном участке 153a второго кривошипного вала 153, соединяется с выступающим концом 126a эксцентричной шпильки 126 первого кривошипно-шатунного механизма, который уже установлен в корпусе 107 зубчатой передачи, и задний конец стержня 159 введен в контакт с передней поверхностью 157b соединительной пластины 157. Таким образом, первый и второй кривошипно-шатунные механизмы собраны таким образом, что они механически взаимно соединены таким образом, что обеспечивается возможность передачи силы вращения.
Ниже поясняется работа молотка 101, имеющего описанную выше конструкцию.
Когда двигатель 111 привода (фиг.11) приводится в движение, вращение на выходе двигателя 111 привода обеспечивает вращение приводящего зубчатого колеса 121 в горизонтальной плоскости. При вращении приводящего зубчатого колеса 121, вращается первый кривошипный вал 125 в горизонтальной плоскости через приводимое зубчатое колесо 123, соединенное с приводящим зубчатым колесом 121. В результате поршень 129 принудительно линейно скользит внутри цилиндра 141 через плечо 127 кривошипа. Таким образом, ударник 143 совершает возвратно-поступательные движения внутри цилиндра 141 и сталкивается с (ударяет в) ударным стержнем 145 под действием функции пневмопружины в цилиндре 141 в результате скользящего движения поршня 129. Кинетическая энергия ударника 143, получаемая им в результате столкновения с ударным стержнем 145, передается на ударное 119 долото. Таким образом, ударное 119 долото выполняет ударное движение в осевом направлении, и работа молотка выполняется над обрабатываемой деталью.
Во время описанной выше работы молотка муфта 151 скольжения управляет открытым и закрытым состоянием вентиляционного отверстия 141b для воздуха цилиндра 141 через второй механизм 116 преобразования движения. В частности, когда второй кривошипный вал 153 второго механизма 116 преобразования движения вращается через эксцентричную шпильку 126 первого механизма 113 преобразования движения, участок 155 эксцентричного вала второго кривошипного вала 153 принудительно вращается в горизонтальной плоскости. В результате, соединительная пластина 157, соединенная с участком 155 эксцентричного вала, принудительно совершает возвратно-поступательные движения в осевом направлении ударного 119 долота. Когда соединительная пластина 157 движется вперед, стержни 159 перемещают муфту 151 скольжения вперед, преодолевая силу смещения прижимной пружины 161, в то время как, когда соединительная пластина 157 движется назад, стержни 159 перемещают муфту 151 скольжения назад под действием силы смещения прижимной пружины 161. В результате этого движения вперед и назад муфты 151 скольжения, вентиляционное отверстие 141b для воздуха открывается и закрывается через кольцеобразную канавку 151b и связующие отверстия 151c.
Далее поясняется управление открыванием и закрыванием вентиляционного отверстия 141b для воздуха. В этом варианте воплощения максимально отведенный конец или самое заднее положение, в которое может перемещаться поршень 129, определяется как верхняя мертвая точка, в то время как максимально продвинутый вперед конец или переднее положение, в которое может перемещаться поршень 129, определяется как нижняя мертвая точка. Когда угол поворота кривошипного вала первого кривошипно-шатунного механизма равен 0°, поршень 129 находится в верхней мертвой точке, в то время как, когда угол поворота кривошипного вала равен 180°, поршень 129 находится в нижней мертвой точке. В данном варианте воплощения моменты времени, в которые происходит открывание и закрывание с помощью муфты 151 скольжения, установлены таким образом, что, когда угол поворота кривошипного вала находится в диапазоне от приблизительно 135° до 220°, вентиляционное отверстие 141b для воздуха воздушной камеры 141a открыто, в то время как в других случаях, или когда угол поворота кривошипного вала находится в диапазоне от приблизительно 0° до 135°, или от 220° до 360°, вентиляционное отверстие 141b для воздуха закрыто. На фиг.12 показано состояние, в котором вентиляционное отверстие 141b для воздуха открыто, и на фиг.13 показано состояние, в котором вентиляционное отверстие 141b для воздуха закрыто.
Воздушная камера 141a имеет минимальный объем, когда поршень 129 перемещен таким образом, что угол поворота кривошипного вала составляет приблизительно от 70° до 87° от верхней мертвой точки. В частности, поршень 129 размещается ближе всего к ударнику 143 таким образом, что воздух, находящийся в воздушной камере 141a, сжимается в максимальной степени. После этого ударник 143 принудительно движется вперед под действием давления воздуха, сжатого до высокого давления. Когда угол поворота кривошипного вала составляет приблизительно 180°, ударник 143 ударяет об ударное 119 долото через ударный стержень 145. После ударного движения ударник 143 принудительно перемещается назад в результате отдачи ударного движения и под действием разности давлений (силы всасывания) между давлением внутри воздушной камеры 141a, которая действует на поверхность заднего конца ударника 143, и внешним давлением (по существу, атмосферным давлением).
В этом варианте воплощения, период между моментом, когда ударник 143 начинает движение вперед, и моментом, когда ударник 143 возвращается в исходное положение, после столкновения с ударным 119 долотом, определен как один цикл. Муфта 151 скольжения начинает открывать вентиляционное отверстие 141b для воздуха под углом поворота кривошипного вала приблизительно 137° и затем поддерживает открытое состояние в течение определенного диапазона углов. После этого муфта 151 скольжения закрывает отверстие 141b для воздуха под углом поворота кривошипного вала приблизительно 220°. В частности, в соответствии с данным вариантом воплощения, моменты времени, в которые муфта 151 скольжения открывает и закрывает вентиляционное отверстие 141b для воздуха, могут быть установлены произвольно во взаимозависимости с положением ударника 143 (поршня 129). В частности, такие моменты времени могут быть установлены таким образом, что, во время движения вперед (ударного движения) ударника 143, отверстие 141b для воздуха открыто в положении, в котором сжатый воздух с высоким давлением, находящийся в воздушной камере 141a, может обеспечить оптимальную скорость удара ударника 143. Кроме того, во время движения назад ударника 143, вентиляционное отверстие 141b закрыто в положении, в котором на ударник 143 может действовать оптимальная сила всасывания. В результате, можно улучшить рабочие характеристики электрического молотка 101. Кроме того, период, в течение которого отверстие 141b для воздуха открыто, определяется шириной (в осевом направлении ударного 119 долота) кольцеобразной канавки 151b, сформированной в муфте 151 скольжения.
Кроме того, в соответствии с данным вариантом воплощения, в котором муфта 151 скольжения механически приводится в движение вторым кривошипно-шатунным механизмом, моменты времени, когда муфта 151 скольжения открывает и закрывает отверстие 141b для воздуха, можно легко регулировать путем соответствующей регулировки положения участка 155 эксцентричного вала второго кривошипно-шатунного механизма в направлении вращения относительно эксцентричной шпильки 126 первого кривошипно-шатунного механизма, который обеспечивает привод ударника 143. Кроме того, период, в течение которого отверстие 141b для воздуха открыто, можно соответствующим образом регулировать путем изменения ширины кольцеобразной канавки 151b, сформированной в муфте 151 скольжения. В частности, в соответствии с данным вариантом воплощения, отверстие 141b для воздуха может быть открыто только, когда это необходимо, и только в течение необходимого периода. Кроме того, при использовании конструкции, в которой второй кривошипно-шатунный механизм приводится в движение через первый кривошипно-шатунный механизм, как ударник 143, так и муфта 151 скольжения могут быть эффективно приведены в движение с помощью одного двигателя 111 привода.
Кроме того, в варианте выполнения, крышка 163 кривошипа установлена в отверстие 107b для закрытия отверстия 107b корпуса 107 зубчатой передачи, и второй кривошипный вал 153 и соединительная пластина 157, которые формируют второй кривошипно-шатунный механизм, установлены на крышке 163 кривошипа. Кроме того, когда крышка 163 кривошипа установлена в отверстие 107b, выемка 153b, сформированная на дискообразном участке 153a второго кривошипного вала 153, соединяется с выступающим концом 126a эксцентричной шпильки 126 первого кривошипного вала 125, таким образом, что второй кривошипно-шатунный механизм механически взаимно соединяется с первым кривошипно-шатунным механизмом. В такой конструкции второй кривошипно-шатунный механизм может быть установлен просто путем установки крышки 163 кривошипа в отверстие 107b. Таким образом, в соответствии с данным вариантом воплощения упрощаются установка второго кривошипно-шатунного механизма и сборка.
Отверстие 107b, сформированное в корпусе 107 зубчатой передачи является отверстием, через которое первый кривошипно-шатунный механизм установлен в корпусе 107 зубчатой передачи. Кроме того, над первым кривошипно-шатунным механизмом присутствует верхняя область, как свободное пространство. В этом варианте воплощения второй кривошипно-шатунный механизм расположен с использованием этого свободного пространства и установлен без изменения внешних размеров существующего электрического молотка 101.
Четвертый вариант воплощения изобретения
Четвертый вариант воплощения настоящего изобретения будет описан ниже со ссылкой на фиг.15-17.
На фиг.15 показан электрический молоток 101 в соответствии с данным вариантом воплощения. На фиг.16 показан вид в разрезе с увеличением, представляющий существенную часть молотка. На фиг.17 показан вид в разрезе вдоль линии B-B на фиг.16. В данном варианте воплощения устройство 171 динамического снижения вибрации, предназначенное для снижения вибрации корпуса 103, установлено в молотке 101. Кроме того, муфта 151, которая движется линейно в осевом направлении ударного долота, для того, чтобы открывать и закрывать отверстие 141b для воздуха воздушной камеры 141a, используется как средство вибрации, для активной вибрации устройства 171 динамического снижения вибрации. В отношении других деталей, данное устройство имеет ту же конструкцию, что и первый вариант воплощения. Компоненты или элементы в данном варианте воплощения, которые являются, по существу, идентичными компонентам или элементам первого варианта воплощения, обозначены теми же номерами ссылочных позиций, что и в первом варианте воплощения, и не будут описаны или будут описаны только кратко. В этом описании принудительно вибрирующее устройство 171 динамического снижения вибрации называется устройством принудительной вибрации.
Устройство 171 динамического снижения вибрации расположено во внутреннем пространстве цилиндрического корпуса 108 и, в основном, включает в себя цилиндрический груз 173, установленный кольцеобразно снаружи цилиндра 141 и передняя и задняя пружины 175F, 175R смещения расположены с передней и задней сторон груза 173 в осевом направлении ударного долота. Передняя и задняя пружины 175F, 175R смещения прикладывают силу пружины к грузу 173 в направлении друг к другу, когда груз 173 движется в осевом направлении ударного 119 долота.
Груз 173 установлен таким образом, что его центр (сила тяжести) совпадает с осью ударного 119 долота, и может свободно скользить так, что внешняя поверхность его стенки удерживается в контакте с внутренней поверхностью стенки цилиндрического корпуса 108. Кроме того, передняя и задняя пружины 175F, 175R смещения сформированы в виде сжимаемых спиральных пружин и, аналогично грузу 173, они установлены таким образом, что каждый из их центров совпадает с осью ударного 119 долота. Один конец (задний конец) задней пружины 175R смещения удерживается в контакте с передней поверхностью фланца 151a муфты 151 скольжения, в то время как другой конец (передний конец) удерживается в контакте с задним осевым концом груза 173. Кроме того, один конец (задний конец) передней пружины 175F смещения удерживается в контакте с осевым передним концом груза 173, в то время как другой конец (передний конец) удерживается в контакте со ступенчатой поверхностью 108a цилиндрического корпуса 108. Поэтому в данном варианте воплощения, задняя пружина 175R смещения также используется как прижимная пружина, предназначенная для смещения муфты 151 скольжения в направлении назад.
Устройство 171 динамического снижения вибрации, имеющее описанную выше конструкцию, используется для уменьшения импульсной и цикличной вибрации, образующейся при ударном действии (когда ударное 119 долото приводятся в движение). В частности, груз 173 и пружины 175F, 175R смещения используются как элементы уменьшения вибрации в устройстве 171 динамического снижения вибрации и взаимодействуют для пассивного уменьшения вибрации корпуса 103 молотка 101. Таким образом, вибрация корпуса 103 молотка 101 может быть эффективно понижена или уменьшена.
Кроме того, в данном варианте воплощения, во время ударного действия, когда участок 155 эксцентричного вала второго кривошипного вала 153 вращается в горизонтальной плоскости, соединительная пластина 157, соединенная с участком 155 эксцентричного вала, принудительно выполняет возвратно-поступательные движения в осевом направлении ударного 119 долота. Когда соединительная пластина 157 движется вперед, муфта 151 скольжения выталкивается вперед через стержень 159 и сжимает пружины 175F, 175R смещения. С другой стороны, когда соединительная пластина 157 движется назад, муфта 151 скольжения выталкивается назад с помощью упругой силы пружин 175F, 175R смещения. В результате такого линейного движения муфты 151 скольжения груз 173 устройства 171 динамического снижения вибрации активно приводится в движение через пружины 175F, 175R смещения и обеспечивает принудительную вибрацию устройства 171 динамического снижения вибрации. В частности, муфта 151 скольжения используется как средство вибрации для принудительной передачи вибрации к устройству 171 динамического снижения вибрации путем активного привода в движение груза 173 устройства 171 динамического снижения вибрации. Таким образом, устройство 171 динамического снижения вибрации используется как активный механизм уменьшения вибрации, в котором груз 173 активно приводится в движение. Поэтому вибрация, создаваемая в корпусе 103 во время ударного действия, может быть дополнительно эффективно уменьшена. В результате, обеспечивается существенная сила уменьшения уровня вибрации даже при работе такого типа, во время которой, хотя чрезвычайно требуется уменьшение вибрации, только небольшое количество вибрации подается в устройство 171 динамического снижения вибрации, и устройство 171 в недостаточной степени выполняет свою функцию, в частности, например, во время операции, которую выполняют, когда пользователь прикладывает большую силу прижима к корпусу 103 (сила прижима ударного 119 долота к обрабатываемой детали).
Как описано выше, в соответствии с данным вариантом воплощения, муфта 151 скольжения может обеспечивать принудительную вибрацию устройства 171 динамического снижения вибрации при поддержании функции управления открыванием и закрыванием отверстий 141b для воздуха, которые описаны в первом варианте воплощения.
Кроме того, в данном варианте воплощения груз 173 и пружины 175F, 175R смещения, которые формируют устройство 171 динамического снижения вибрации, установлены кольцеобразно снаружи цилиндра 141. Таким образом, может эффективно использоваться пространство вдоль внешней кромки цилиндра 141. Кроме того, груз 173 и пружины 175F, 175R смещения могут быть расположены таким образом, что их центры тяжести будут размещены на оси ударного 119 долота. В результате, можно предотвратить действие результирующей силы (силы поперечного или вертикального вращения вокруг оси, проходящей поперечно осевому направлению ударного долота), на корпус 103 при возвратно-поступательных движениях груза 173.
Кроме того, в данном варианте воплощения груз 173 расположен таким образом, что он может скользить в осевом направлении ударного долота вдоль внутренней поверхности стенки цилиндрического корпуса 108. При такой конструкции скользящее движение груза 173 может быть стабилизировано.
Кроме того, в описанных выше вариантах выполнения электрический молоток 101 описан как пример ударного инструмента. Однако, естественно, настоящее изобретение также можно применять к бурильному молотку, в котором ударное 119 долото может выполнять ударные движения в его осевом направлении и может поворачиваться вокруг его оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2466854C2 |
| ИНЕРЦИОННО-УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2006 |
|
RU2341366C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2477211C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2011 |
|
RU2570863C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2544971C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2011 |
|
RU2577639C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2515943C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2011 |
|
RU2560888C2 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2531221C2 |
| МЕХАНИЗИРОВАННЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 2007 |
|
RU2438853C2 |

Изобретение относится к ударным инструментам с долотом. Ударный инструмент содержит корпус, цилиндр, установленный в корпусе, устройство динамического снижения вибрации и механизм механической вибрации. Устройство динамического снижения вибрации содержит груз, способный линейно перемещаться под действием силы смещения упругого элемента, и уменьшает вибрацию корпуса при ударном действии в результате движения груза в осевом направлении долота. Механизм механической вибрации приводит в движение груз путем приложения внешней силы к грузу через упругий элемент. Груз и упругий элемент расположены на оси долота между внутренней поверхностью стенки корпуса и внешней поверхностью стенки цилиндра и охватывают часть внешней поверхности стенки цилиндра в направлении вдоль окружности. В результате снижается вибрация и увеличивается эффективность ударного действия инструмента. 2 н. и 9 з.п. ф-лы, 17 ил.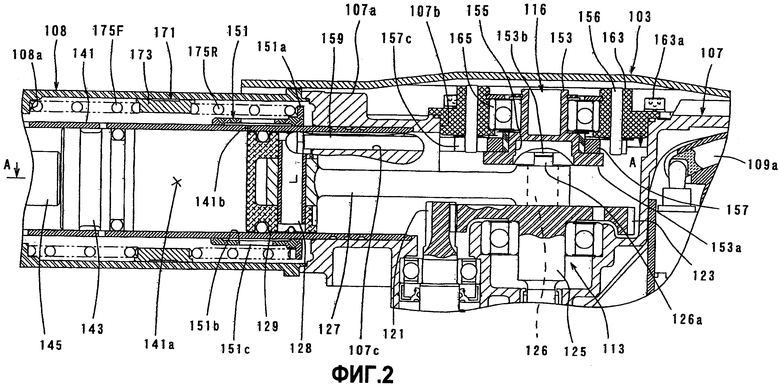
1. Ударный инструмент, выполняющий предварительно заданное ударное действие на обрабатываемой детали при ударном движении долота в его осевом направлении, содержащий корпус, цилиндр, установленный в корпусе, устройство динамического снижения вибрации, имеющее груз, способный линейно перемещаться под действием силы смещения упругого элемента, и уменьшающее вибрацию корпуса при ударном действии в результате движения груза в осевом направлении долота, и механизм механической вибрации, осуществляющий привод в движение груза путем приложения внешней силы, помимо вибрации корпуса инструмента, к грузу через упругий элемент, при этом груз и упругий элемент расположены на оси долота и между внутренней поверхностью стенки корпуса и внешней поверхностью стенки цилиндра и охватывают по меньшей мере часть внешней поверхности стенки цилиндра в направлении вдоль окружности.
2. Ударный инструмент по п.1, дополнительно содержащий приводной механизм для линейного перемещения долота, содержащий двигатель, ударный элемент, способный линейно перемещаться в осевом направлении долота и обеспечивать линейное перемещение долота, и первый кривошипно-шатунный механизм, преобразующий вращение на выходе двигателя в линейное перемещение и таким образом осуществляющий привод ударного элемента, причем механизм механической вибрации содержит скользящий элемент, способный линейно перемещаться в направлении оси долота и прикладывать внешнюю силу к упругому элементу, и имеется второй кривошипно-шатунный механизм, преобразующий вращение первого кривошипно-шатунного механизма в линейное перемещение и осуществляющий привод скользящего элемента.
3. Ударный инструмент по п.2, дополнительно содержащий отверстие, сформированное в корпусе и предназначенное для установки первого кривошипно-шатунного механизма в корпусе, и закрывающий элемент, способный устанавливаться в отверстии снаружи корпуса и закрывать отверстие, причем первый кривошипно-шатунный механизм имеет кривошипный вал, установленный с возможностью вращения в корпусе и обращенный к отверстию, второй кривошипно-шатунный механизм имеет кривошипный вал, установленный с возможностью вращения на закрывающем элементе и расположенный напротив кривошипного вала первого кривошипно-шатунного механизма, вогнутый участок, сформированный на одном из противоположных концов кривошипных валов первого и второго кривошипно-шатунных механизмов, и выпуклый участок, сформированный на другом из противоположных концов кривошипных валов и способный соединяться с вогнутым участком, при этом при установке закрывающего элемента в отверстии кривошипные валы первого и второго кривошипно-шатунного механизмов способны соединиться в результате соединения вогнутого участка и выпуклого участка и передавать вращение кривошипного вала первого кривошипно-шатунного механизма к кривошипному валу второго кривошипно-шатунного механизма.
4. Ударный инструмент по п.2, в котором первый кривошипно-шатунный механизм содержит вращающийся кривошипный вал, имеющий эксцентричный участок в положении, смещенном от его центра вращения, и соединительный элемент, преобразующий вращение эксцентричного участка в линейное перемещение приводного элемента, и второй кривошипно-шатунный механизм содержит кривошипный вал, имеющий эксцентричный участок в положении, смещенном от его центра вращения, и соединительный элемент, преобразующий вращение эксцентричного участка в линейное перемещение скользящего элемента.
5. Ударный инструмент по п.1, в котором груз расположен в корпусе инструмента с возможностью перемещения вдоль внутренней поверхности стенки корпуса инструмента в осевом направлении долота.
6. Ударный инструмент, выполняющий предварительно заданное ударное действие на обрабатываемой детали при ударном движении долота в осевом направлении, содержащий корпус, цилиндр, установленный в корпусе, приводной элемент, способный линейно перемещаться в осевом направлении долота в цилиндре, ударный элемент, способный линейно перемещаться в осевом направлении долота в цилиндре, воздушную камеру, образованную между приводным элементом и ударным элементом в цилиндре, при этом ударный элемент способен линейно перемещаться в результате флуктуации давления в воздушной камере в результате линейного перемещения приводного элемента и ударять долото для осуществления ударного действия на обрабатываемой детали, вентиляционную часть, сформированную в цилиндре и обеспечивающую сообщение между воздушной камерой и окружающей средой для регулирования давления воздушной камеры и обеспечения плавного перемещения ударного элемента, и элемент, открывающий и закрывающий вентиляционную часть, расположенный снаружи цилиндра и способный скользить в осевом направлении долота, при этом при осуществлении ударного действия с помощью долота, элемент, открывающий и закрывающий вентиляционную часть, способен открывать и закрывать вентиляционную часть в результате движения между открытым положением для открытия вентиляционной части и закрытым положением для закрытия вентиляционной части в заданные моменты времени.
7. Ударный инструмент по п.6, дополнительно содержащий двигатель, установленный в корпусе, первый кривошипно-шатунный механизм, преобразующий вращение на выходе двигателя в линейное перемещение в осевом направлении долота и таким образом обеспечивающий привод приводного элемента, и второй кривошипно-шатунный механизм, преобразующий вращение первого кривошипно-шатунного механизма в линейное перемещение в осевом направлении долота и таким образом обеспечивающий привод элемента, открывающего и закрывающего вентиляционную часть.
8. Ударный инструмент по п.7, дополнительно содержащий отверстие, сформированное в корпусе и предназначенное для установки первого кривошипно-шатунного механизма в корпусе, и закрывающий элемент, способный устанавливаться в отверстии снаружи корпуса и закрывать отверстие, при этом первый кривошипно-шатунный механизм имеет кривошипный вал, установленный с возможностью вращения в корпусе и обращенный к отверстию, второй кривошипно-шатунный механизм имеет кривошипный вал, установленный с возможностью вращения на закрывающем элементе и противоположно кривошипному валу первого кривошипно-шатунного механизма, вогнутый участок, сформированный на одном из противоположных концов кривошипных валов первого и второго кривошипно-шатунных механизмов, и выпуклый участок, сформированный на другом из противоположных концов кривошипных валов и способный соединяться с вогнутым участком, при этом при установке закрывающего элемента в отверстии кривошипные валы первого и второго кривошипно-шатунного механизмов способны соединяться в результате соединения вогнутого участка и выпуклого участка и передавать вращение кривошипного вала первого кривошипно-шатунного механизма кривошипному валу второго кривошипно-шатунного механизма.
9. Ударный инструмент по п.7, в котором первый кривошипно-шатунный механизм содержит вращающийся кривошипный вал, имеющий эксцентричный участок в положении, смещенном от его центра вращения, и соединительный элемент, преобразующий вращение эксцентричного участка в линейное перемещение приводного элемента, и второй кривошипно-шатунный механизм содержит вращающийся кривошипный вал, имеющий эксцентричный участок в положении, смещенном от его центра вращения, и соединительный элемент, преобразующий вращение эксцентричного участка в линейное перемещение элемента, открывающего и закрывающего вентиляционную часть.
10. Ударный инструмент по п.7, в котором, если максимально убранное положение заднего конца и максимально продвинутое вперед положение переднего конца элемента привода принять как 0° и 180° соответственно в отношении угла поворота кривошипного вала первого кривошипно-шатунного механизма, элемент, открывающий и закрывающий вентиляционную часть, способен открывать вентиляционную часть при угле поворота кривошипного вала в диапазоне от около 135° до около 220° и закрывать вентиляционную часть за пределами упомянутого диапазона углов.
11. Ударный инструмент по п.6, дополнительно содержащий устройство динамического снижения вибрации, имеющее груз, установленный снаружи цилиндра и способный линейно перемещаться под действием силы смещения упругого элемента, и уменьшающее вибрацию корпуса при ударном действии в результате движения груза в осевом направлении долота, причем элемент, открывающий и закрывающий вентиляционную часть, используется как средство вибрации для принудительной вибрации устройства динамического снижения вибрации посредством привода в движение груза через упругий элемент.
| WO 2004082897 A1, 30.09.2004 | |||
| US 2006076154 A1, 13.04.2006 | |||
| МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ | 2004 |
|
RU2268818C2 |
| Электрический бурильный уголок | 1934 |
|
SU44889A1 |
| US 2002185288 A1, 12.12.2002. | |||

