ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к ударному инструменту для выполнения ударного действия на обрабатываемом объекте и более конкретно к механизму для амортизации силы реакции от обрабатываемого объекта при ударном действии.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Японская нерассмотренная выложенная заявка на патент №52-109673 раскрывает электрический молоток, имеющий устройство уменьшения вибрации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является усовершенствование механизма уменьшения вибрации в ударном инструменте.
Согласно изобретению создан ударный инструмент, содержащий корпус инструмента, ударник, осуществляющий заданное ударное действие на обрабатываемом объекте ударяющим движением в осевом направлении, преобразователь динамической вибрации, имеющий груз, способный линейно двигаться под действием силы смещения упругого элемента и уменьшающий вибрацию во время действия ударника движением груза в осевом направлении ударника, позиционирующий упругий элемент, образованный упругим элементом преобразователя динамической вибрации, контактирующий с ударником и позиционирующий корпус инструмента по отношению к обрабатываемому объекту при прижатии ударника к обрабатываемому объекту и его толкании к корпусу инструмента перед действием ударника, поглощая силу реакции, созданной отдачей от обрабатываемого объекта и действующей на ударник при выполнении ударником ударного действия на обрабатываемом объекте.
В настоящем изобретении позиционирование корпуса инструмента по отношению к обрабатываемому объекту выполняется упругим элементом преобразователя динамической вибрации. Преобразователь динамической вибрации служит в качестве механизма уменьшения вибрации, в котором груз и упругий элемент взаимодействуют для уменьшения вибрации, создаваемой в корпусе инструмента в осевом направлении ударника. Кроме того, упругий элемент преобразователя динамической вибрации упруго деформируется силой реакции, которую ударник воспринимает от обрабатываемого объекта и тем самым поглощает эту силу реакции. В результате уменьшается передача силы реакции к корпусу инструмента. Таким образом, согласно данному изобретению упругий элемент преобразователя динамической вибрации способен позиционировать корпус инструмента и поглощать силы реакции так, что количество частей для уменьшения вибрации может быть уменьшено, и структура может быть упрощена.
Ударный инструмент может дополнительно содержать приводной механизм, линейно перемещающий ударник, и цилиндр, в котором размещен приводной механизм, при этом груз и упругий элемент, образующие преобразователь динамической вибрации, расположены по кольцу снаружи цилиндра. В такой компоновке внешнее периферическое пространство цилиндра может быть эффективно использовано. Кроме того, центр тяжести груза в преобразователе динамической вибрации может быть помещен на оси ударника так, что предотвращается создание пары сил.
Сила реакции, действующая на ударник, может содержать средство вибрации для активной вибрации груза посредством упругого элемента. Преобразователь динамической вибрации по существу служит для пассивного подавления вибрации корпуса инструмента вибрацией груза, которая вызывается вибрацией корпуса инструмента. В таком механизме пассивного уменьшения вибрации в форме преобразователя динамической вибрации груз подвергается вибрации посредством упругого элемента. В данной конструкции эффективность уменьшения вибрации преобразователя динамической вибрации может быть повышена. В частности, в настоящем изобретении сила реакции от обрабатываемого объекта применяется в качестве средства для вибрации груза. Следовательно, нет необходимости предусматривать добавочное средство для принудительной вибрации, так что потребление энергии может быть эффективно уменьшено, и структура может быть упрощена.
Ударный инструмент может дополнительно содержать цилиндр, размещенный в корпусе инструмента, приводной элемент, линейно перемещающийся в осевом направлении ударник, ударяющий элемент, линейно перемещающийся в осевом направлении ударника в цилиндре, и воздушную полость, образованную между приводным элементом и ударяющим элементом в цилиндре, при этом ударяющий элемент способен линейно перемещаться посредством колебаний давления в воздушной полости в результате линейного перемещения приводного элемента и ударять ударник для выполнения заданного ударяющего действия на обрабатываемом объекте, позиционирующую деталь, удерживаемую в контакте с ударником при нагруженных условиях, в которых ударник прижимается к обрабатываемому объекту и толкается к стороне приводного элемента, причем позиционирующая деталь отделена от ударника при ненагруженных условиях, в которых ударник не прижимается к обрабатываемому объекту, упруго деформируемый позиционирующий упругий элемент, позиционирующий корпус инструмента по отношению к обрабатываемому объекту посредством контакта с позиционирующей деталью при нагруженных условиях и поглощающий силу реакции, созданную отдачей от обрабатываемого объекта и подаваемой от ударника посредством позиционирующей детали, связующую часть, обеспечивающую связь между воздушной полостью и внешней средой для предотвращения холостого хода долота, и деталь открывания-закрывания связующей части, содержащую ударяющий элемент, расположенный внутри цилиндра, или подвижную деталь, расположенную снаружи цилиндра, причем деталь открывания-закрывания связующей части подвижна между закрытой позицией для закрывания связующей части и открытой позицией для закрывания связующей части, при этом при ненагруженных условиях деталь открывания-закрывания связующей части помещена в открытую позицию для открывания связующей части и предотвращения колебания давления воздушной полости, а при нагруженных условиях деталь открывания-закрывания связующей части толкается ударником или позиционирующей деталью к закрытой позиции для закрывания связующей части и разрешения колебания давления воздушной полости.
Ударный инструмент может дополнительно содержать упругую деталь, смещающую позиционирующую деталь вперед от ударяющего элемента. Позиционирующий упругий элемент и упругая деталь могут быть расположены параллельно в радиальном направлении и в одной и той же позиции на оси ударника. Позиционирующая деталь может содержать кольцевую деталь, расположенную на ударнике и контактирующую с наружным участком ударника сзади, деталь наружного покрытия, обращенную к позиционирующей детали с заданным зазором между ними и расположенную позади позиционирующей детали в корпусе инструмента с предотвращением от движения назад, и позиционирующий упругий элемент содержит витую пружину, расположенную между позиционирующей деталью и деталью наружного покрытия. Осевая передняя область витой пружины может быть размещена над наружным участком позиционирующей детали, и передний конец витой пружины удерживается в контакте с позиционирующей деталью и расположен перед точкой контакта между ударником и позиционирующей деталью.
Ударный инструмент может содержать ограничитель, расположенный на одной из позиционирующей детали и детали наружного покрытия, и упруго деформируемый контактом с другой из позиционирующей деталью и деталью наружного покрытия перед контактом витков витой пружины при поглощении силы реакции деформацией сжатия витой пружины.
Другие цели, признаки и преимущества настоящего изобретения раскрыты в нижеследующем подробном описании со ссылками на чертежи, на которых изображено следующее:
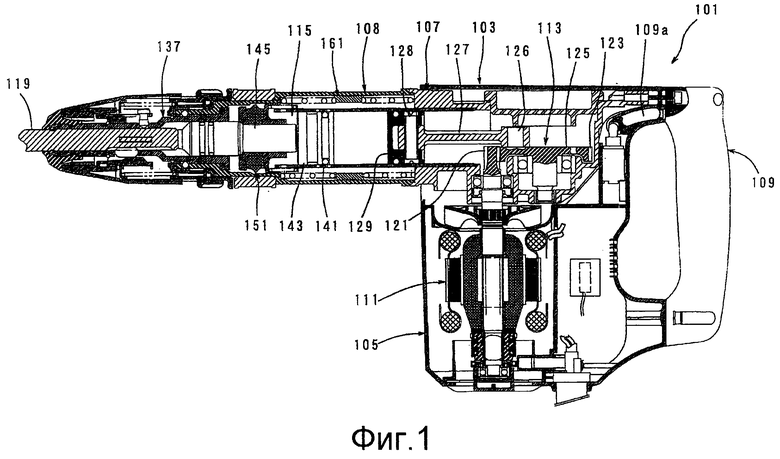
Фиг.1 изображает вид сбоку в разрезе электрического молотка согласно первому варианту осуществления этого изобретения.
Фиг.2 - увеличенный вид в разрезе существенной части молотка при ненагруженных условиях, в которых долото молотка не прижимается к обрабатываемому объекту.
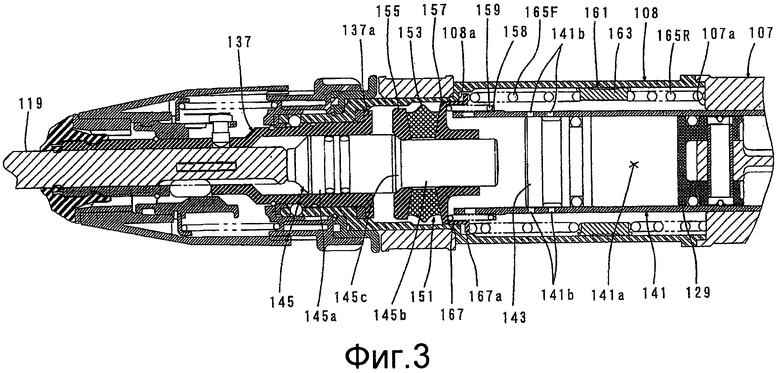
Фиг.3 - увеличенный вид в разрезе существенной части электрического молотка при нагруженных условиях, в которых долото молотка прижимается к обрабатываемому объекту.
Фиг.4 - увеличенный вид в разрезе существенной части электрического молотка согласно модификации к первому варианту осуществления при ненагруженных условиях, в которых долото молотка не прижимается к обрабатываемому объекту.
Фиг.5 - увеличенный вид сверху в разрезе существенной части электрического молотка согласно модификации при нагруженных условиях, в которых долото молотка прижимается к обрабатываемому объекту.
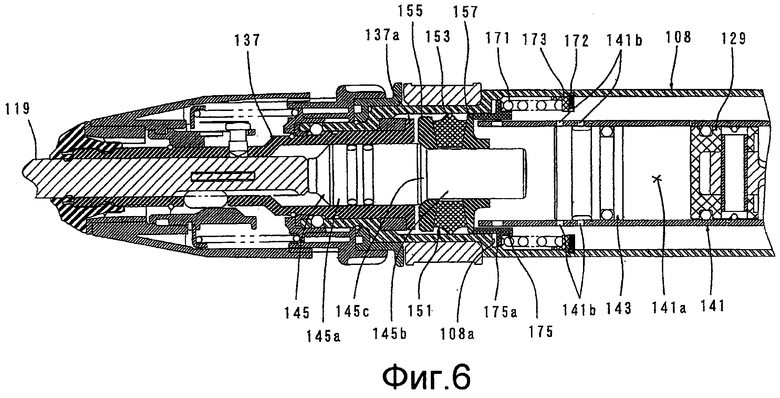
Фиг.6 - вид сверху в разрезе, показывающий существенную часть электрического молотка в состоянии поглощения силы реакции.
Фиг.7 - вид сбоку в разрезе, показывающий перфоратор, согласно второму варианту осуществления этого изобретения в захваченном состоянии (состояние предотвращенного холостого привода) ударника.
Фиг.8 - также вид сбоку в разрезе, показывающий перфоратор согласно второму варианту осуществления во время ударяющего движения.
Фиг.9 - увеличенный вид части A на фиг.8.
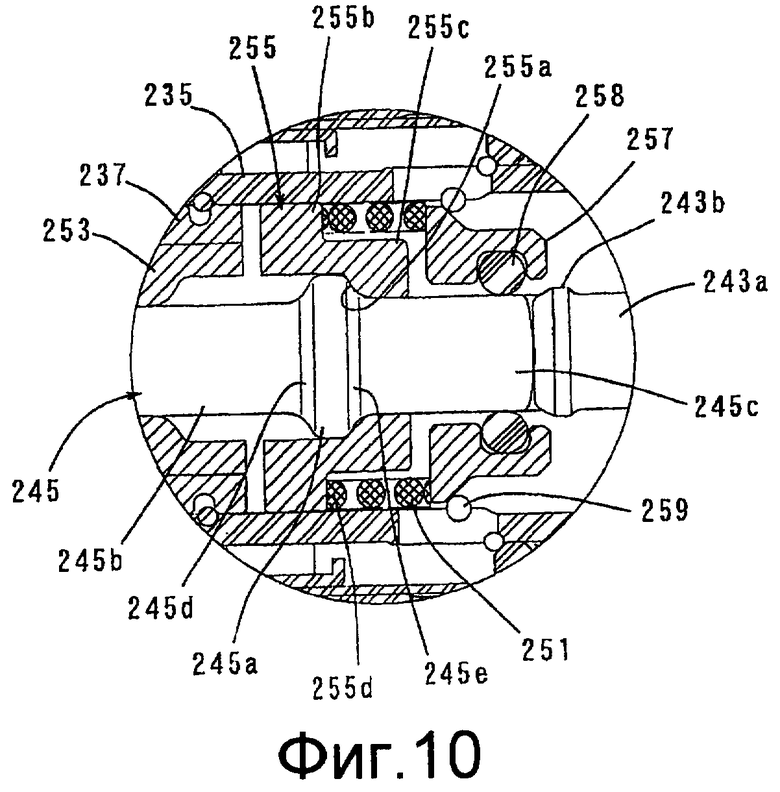
Фиг.10 - увеличенный вид части A на фиг.8 в состоянии поглощения силы реакции.
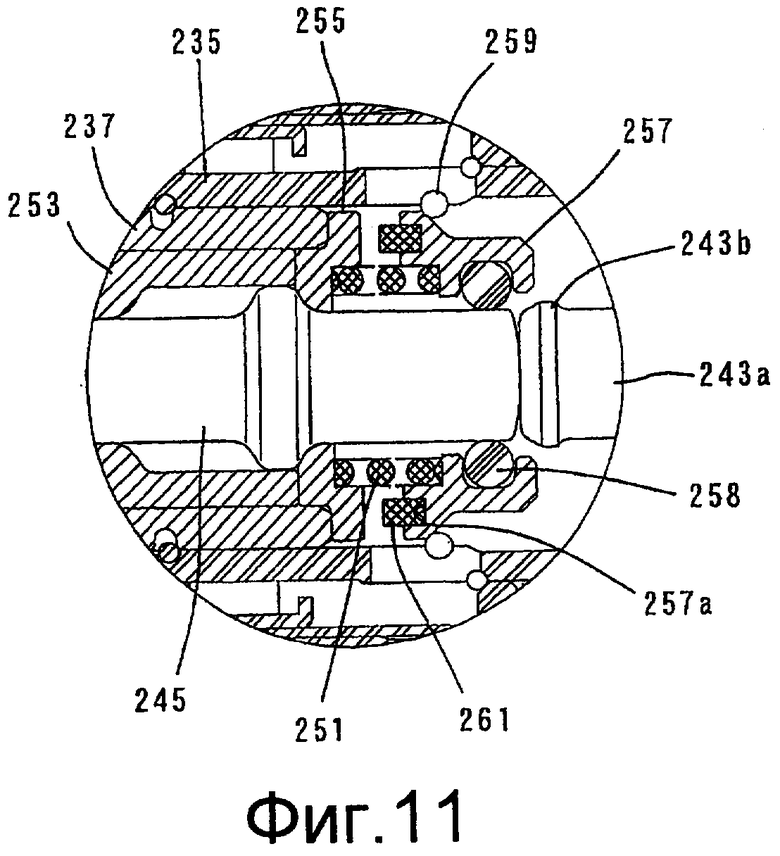
Фиг.11 - увеличенный вид существенной части модификации второго варианта осуществления во время ударяющего движения.
Фиг.12 - увеличенный вид существенной части модификации в состоянии поглощения силы реакции.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Каждый из дополнительных признаков и этапов способа, раскрытых выше и ниже, может быть применен отдельно или совместно с другими признаками и этапами способа, чтобы обеспечивать и производить усовершенствованные ударные инструменты, и способ для использования таких ударных инструментов и устройств, применяемых в них. Предпочтительные варианты по настоящему изобретению, которые использовали многие из этих дополнительных признаков и этапов способа совместно, будут сейчас описаны подробно со ссылкой на чертежи. Это подробное описание просто предназначено обучить специалиста в данной области техники дополнительным подробностям для применения на практике предпочтительных аспектов настоящих идей и не предназначено ограничивать объем изобретения. Только формула изобретения определяет объем заявленного изобретения. Поэтому комбинации признаков и этапов, раскрытых в нижеследующем подробной описании, могут не являться необходимыми, чтобы применять на практике изобретение в самом широком смысле, а изложены просто, чтобы подробно описывать некоторые представительные образцы изобретения, при этом подробное описание будет дано со ссылкой на прилагаемые чертежи.
Первый вариант осуществления изобретения
Первый вариант осуществления настоящего изобретения сейчас описывается со ссылкой на фиг.1-3. На фиг.1 показан электрический молоток 101 как вариант осуществления ударного инструмента согласно настоящему изобретению.
Молоток 101 данного варианта осуществления включает в себя корпус 103, долото 119 молотка, съемным образом соединенное с областью конца вершины (на левой стороне, как видно на фиг.1) корпуса 103 посредством держателя 137 инструмента, и рукоятку 109, которая присоединена к корпусу 103 на стороне, противоположной долоту 119 молотка, и выполнена с возможностью быть удерживаемой пользователем. Долото 119 молотка удерживается держателем 137 инструмента с возможностью возвратно-поступательного движения по отношению к держателю 137 инструмента в его осевом направлении и предотвращения от вращения по отношению к держателю 137 инструмента в его направлении по окружности. В настоящем варианте осуществления, ради удобства объяснения, сторона долота 119 молотка принимается в качестве передней стороны, и сторона рукоятки 109 - в качестве задней стороны.
Корпус 103 включает в себя кожух 105 двигателя, который размещает приводной двигатель 111, и кожух 107 редуктора, который размещает механизм 113 преобразования движения, и ударяющий механизм 115. Механизм 113 выполнен с возможностью надлежащим образом преобразовывать вращения приводного двигателя 111 к линейному движению и затем передавать его к ударяющему механизму 115. В результате создается ударная сила в осевом направлении долота 119 молотка посредством ударяющего механизма 115. Кроме того, ползунковый переключатель 109a предусмотрен на рукоятке 109 и может плавно перемещаться пользователем для приведения в движение приводного двигателя 111.
Механизм 113 преобразования движения включает в себя ведущую шестерню 121, которая вращается в горизонтальной плоскости приводным двигателем 111, кривошипный диск 125, имеющий ведомую шестерню 123, которая входит в зацепление с ведущей шестерней 121, плечо 127 кривошипа, которое свободно присоединено на его одном конце к кривошипному диску 125 посредством вала 126 эксцентрика в позиции, смещенной на заданное расстояние от центра вращения кривошипного диска 125, и приводной элемент в форме поршня 129, смонтированного к другому концу плеча 127 кривошипа посредством соединительного вала 128. Кривошипный диск 125, плечо 127 кривошипа и поршень 129 образуют кривошипно-шатунный механизм.
Как показано на фиг.2-3, ударяющий механизм 115 включает в себя ударяющий элемент 143, который расположен с возможностью скольжения во внутреннем диаметре цилиндра 141, и промежуточный элемент в форме ударного болта 145, который расположен с возможностью скольжения в держателе 137 инструмента, и передает кинетическую энергию ударяющего элемента 143 к долоту 119 молотка. Воздушная полость 141a определена между поршнем 129 и ударяющим элементом 143 в цилиндре 141. Ударяющий элемент 143 приводится посредством действия воздушной пружины воздушной полости 141a цилиндра 141, которое вызывается движением скольжения поршня 129. Ударяющий элемент 143 затем сталкивается с (ударяет) промежуточным элементом в форме ударного болта 145, который расположен с возможностью скольжения в держателе 137 инструмента, и передает ударяющую силу к долоту 119 молотка посредством ударного болта 145. Ударный болт 145 и долото 119 молотка являются признаками, которые соответствуют «ударнику» согласно этому изобретению.
Воздушная полость 141a служит для приведения в движение ударяющего элемента 143 посредством действия воздушной пружины и связывания с наружной поверхностью посредством воздушных отверстий 141b, которые сформированы в цилиндре 141 для предотвращения холостого привода. При ненагруженных условиях, в которых долото 119 молотка не прижимается к обрабатываемому объекту, или в состоянии, в котором ударный болт 145 не толкается назад, ударяющему элементу 143 позволяется двигаться к передней позиции для открывания воздушных отверстий 141b (фиг.2). С другой стороны, при нагруженных условиях, в которых долото 119 молотка прижимается к обрабатываемому объекту силой пользователя нажатия, прикладываемой вперед к корпусу 103 инструмента, ударяющий элемент 143 не толкается отводящим ударным болтом 145 и перемещается к задней позиции для закрывания воздушных отверстий 141b (фиг.3). Воздушные отверстия 141b являются признаками, которые соответствуют «связующей части» согласно этому изобретению.
Таким образом, ударяющий элемент 143 управляет открыванием и закрыванием воздушных отверстий 141b воздушной полости 141a. Открывание воздушных отверстий 141b блокирует действие воздушной пружины, в то же время закрывание воздушных отверстий 141b разблокирует действие воздушной пружины. Конкретно, воздушные отверстия 141b и ударяющий элемент 143 образуют механизм предотвращения холостого привода такого типа, который открывает воздушную полость, чтобы предотвращать привод долота 119 молотка при ненагруженных условиях (холостой привод). Ударяющий элемент 143 является признаком, который соответствует «детали открывания-закрывания связующей части» согласно этому изобретению.
Кроме того, молоток 101 в этом варианте осуществления имеет преобразователь 161 динамической вибрации для уменьшения вибрации, созданной в корпусе 103 во время работы молотком. Кольцевое пространство определено между внутренней стороной кожуха 107 редуктора, который размещает цилиндр 141, и внешней стороной цилиндра 141. Преобразователь 161 динамической вибрации главным образом включает в себя цилиндрический груз 163, расположенный в кольцевом пространстве, и переднюю и заднюю смещающие пружины 165F, 165R, расположенные на передней и задней сторонах груза 163 в осевом направлении долота молотка. Смещающие пружины 165F, 165R являются признаками, которые соответствуют «упругому элементу» согласно этому изобретению. Передняя и задняя смещающие пружины 165F, 165R оказывают усилие пружины на груз 163 в направлении друг к другу, когда груз 163 движется в осевом направлении долота 119 молотка. Часть картера 107 редуктора, которая размещает цилиндр 141, сформирована отдельной цилиндрической деталью (бочкой) 108. Цилиндрическая деталь 108 и кожух 107 редуктора жестко присоединены друг к другу и фактически сформированы как один компонент.
Груз 163 скомпонован так, что его центр совпадает с осью долота 119 молотка, и может свободно скользить со своей поверхностью наружной стенки, удерживаемой в соприкосновении с поверхностью внутренней стенки цилиндрической детали 108. Кроме того, передняя и задняя смещающие пружины 165F, 165R сформированы витыми пружинами сжатия и, как груз 163, они скомпонованы так, что каждый из их центров совпадает с осью долота 119 молотка. Один конец (задний конец) задней смещающей пружины 165R удерживается в соприкосновении с принимающей пружину поверхностью 107a кожуха 107 редуктора, в то же время другой конец (передний конец) удерживается в соприкосновении с осевым задним концом груза 163. Кроме того, один конец (задний конец) передней смещающей пружины 165F удерживается в соприкосновении с осевым передним концом груза 163, в то же время другой конец (передний конец) удерживается в соприкосновении с принимающей пружину деталью 167.
Принимающая пружину деталь 167 сконфигурирована как кольцо, имеющее выдающийся радиально наружу заплечик 167a. Принимающая пружину деталь 167 пригнана во внутренний диаметр цилиндрической детали 108 так, что она может скользить в осевом направлении долота молотка. Заплечик 167a принимающей пружину детали 167 соприкасается со ступенчатой поверхностью 108a зацепления цилиндрической детали 108 сзади и обычно удерживается в этой позиции соприкосновения.
Преобразователь 161 динамической вибрации уменьшает импульсную и циклическую вибрацию, вызываемую во время работы молотком (когда приводится долото 119 молотка). Конкретно, груз 163 и смещающие пружины 165F, 165R служат в качестве уменьшающих вибрацию элементов в преобразователе 161 динамической вибрации и взаимодействуют, чтобы пассивно уменьшать вибрацию корпуса 103 молотка 101. Таким образом, вибрация молотка 101 может быть эффективно смягчена или уменьшена.
В молотке 101, когда долото 119 молотка прижимается к обрабатываемому объекту силой пользователя нажатия, прикладываемой вперед к корпусу 103, ударный болт 145 толкается назад (к поршню 129) вместе с долотом 119 молотка и входит в соприкосновение с деталью со стороны корпуса. В результате корпус 103 позиционируется по отношению к обрабатываемому объекту. В этом варианте осуществления такое позиционирование совершается описанными выше смещающими пружинами 165F, 165R преобразователя 161 динамической вибрации посредством позиционирующей детали 151.
Позиционирующая деталь 151 является частью узла, включающей в себя резиновое кольцо 153, твердую металлическую шайбу 155 передней стороны, соединенную с осевой передней стороной резинового кольца 153, и твердую металлическую шайбу 157 задней стороны, соединенную с осевой задней стороной резинового кольца 153. Позиционирующая деталь 151 свободно пригнана на участок 145b малого диаметра ударного болта 145. Ударный болт 145 имеет ступенчатую, цилиндрическую форму, имеющую участок 145a большого диаметра, который пригнан по скольжению в цилиндрический участок держателя 137 инструмента, и участок 145b малого диаметра, сформированный на задней стороне участка 145a большого диаметра. Ударный болт 145 имеет конический участок 145c, сформированный между поверхностью наружной стенки участка 145a большого диаметра и поверхностью наружной стенки участка 145b малого диаметра. Кроме того, позиционирующая деталь 151 расположена между поверхностью наружной стенки участка 145b малого диаметра и поверхностью внутренней стенки цилиндрической детали 108.
При нагруженных условиях, в которых долото 119 молотка прижимается пользователем к обрабатываемому объекту, когда ударный болт 145 отводится вместе с долотом 119 молотка, конический участок 145c ударного болта 145 соприкасается с позиционирующей деталью 151 в заданной отведенной позиции и толкает позиционирующую деталь 151 назад. Затем позиционирующая деталь 151 вступает в соприкосновение с передней торцевой поверхностью принимающей пружину детали 167. Конкретно, смещающие пружины 165F, 165R упруго воспринимают силу пользователя нажатия прижимания долота 119 молотка к обрабатываемому объекту так, что корпус 103 позиционируется по отношению к обрабатываемому объекту. Поэтому смещающие пружины 165F, 165R выполнены с возможностью обычно иметь избыточное давление, большее, чем сила пользователя прижимания долота 119 молотка к обрабатываемому объекту.
Позиционирующая деталь 151 смещается вперед витой пружиной 159. Таким образом, при ненагруженных условиях, в которых долото 119 молотка не прижимается к обрабатываемому объекту, позиционирующая деталь 151 перемещается к передней позиции, в которой осевой передний конец передней металлической шайбы 155 соприкасается с задним концом 137a держателя 137 инструмента и удерживается в позиции. Перемещая таким образом позиционирующую деталь 151 к передней позиции, ударный болт 145 может быть помещен от ударяющего элемента 143. В результате ударяющий элемент 143 предотвращается от холостого привода долота 119 молотка, когда поршень 129 приводится при ненагруженных условиях. Кроме того, позиционирующая деталь 151, удерживаемая в передней позиции, отделяется от конического участка 145c ударного болта 145. Витая пружина 159 расположена снаружи цилиндра 141 и скомпонована радиально внутрь из передней смещающей пружины 165F преобразователя 161 динамической вибрации, параллельно смещающей пружине 165F. Один осевой конец (задний конец) витой пружины 159 принимается стопорным кольцом 158, закрепленным к цилиндру 141, и другой конец удерживается в соприкосновении с задней торцевой поверхностью задней металлической шайбы 157.
Действие молотка 101 осуществляется следующим образом. Когда приводной двигатель 111 (фиг.1) приводится, вращение приводного двигателя 111 приводит во вращение ведущую шестерню 121 в горизонтальной плоскости. Когда ведущая шестерня 121 вращается, кривошипный диск 125 поворачивается в горизонтальной плоскости посредством ведомой шестерни 123, входящей в зацепление с ведущей шестерней 121. Затем поршень 129 линейно скользит в цилиндре 141 посредством плеча 127 кривошипа. В это время при ненагруженных условиях, в которых долото 119 молотка не прижимается к обрабатываемому объекту, как показано на фиг.2, позиционирующая деталь 151 смещается вперед витой пружиной 159 и помещается в переднюю позицию, определяемую задним концом 137a держателя 137 инструмента. В результате ударяющий элемент 143 движется или ему позволяется двигаться к своей передней позиции для открывания воздушных отверстий 141b. Следовательно, когда поршень 129 движется вперед или назад, воздух выпускается из или в воздушную полость 141a через воздушные отверстия 141b. Таким образом, воздушная полость 141a предотвращается от выполнения действия пружины сжатия. Это означает, что предотвращается холостой привод долота 119 молотка.
С другой стороны, при нагруженных условиях, в которых долото 119 молотка прижимается к обрабатываемому объекту, как показано на фиг.3, ударный болт 145 толкается назад вместе с долотом 119 молотка и, в свою очередь, толкает ударяющий элемент 143 назад так, что он закрывает воздушные отверстия 141b. Таким образом, ударяющий элемент 143 двигается возвратно-поступательно в цилиндре 141 и сталкивается с (ударяет) ударным болтом 145 действием функции воздушной пружины в цилиндре 141 в результате движения скольжения поршня 129. Кинематическая энергия ударяющего элемента 143, которая вызывается столкновением с ударным болтом 145, передается к долоту 119 молотка. Таким образом, долото 119 молотка выполняет ударяющее движение в своем осевом направлении, и работа молотка выполняется на обрабатываемом объекте.
Как описано выше, работа молотком выполняется при нагруженных условиях, в которых долото 119 молотка прижимается к обрабатываемому объекту. Когда долото 119 молотка прижимается к обрабатываемому объекту, долото 119 молотка толкается назад и, в свою очередь, отводит ударный болт 145. Задняя металлическая шайба 157 позиционирующей детали 151 затем соприкасается с принимающей пружину деталью 167 преобразователя 161 динамической вибрации. Таким образом, смещающие пружины 165F, 165R преобразователя 161 динамической вибрации упруго воспринимают силу пользователя нажатия прижимания долота 119 молотка к обрабатываемому объекту так, что корпус 103 позиционируется по отношению к обрабатываемому объекту. В этом состоянии выполняется работа молотком. Во время работы молотком преобразователь 161 динамической вибрации служит в качестве механизма уменьшения вибрации, в котором груз 163 и смещающие пружины 165F, 165R взаимодействуют, чтобы пассивно уменьшать циклическую вибрацию, вызываемую в корпусе 103 в осевом направлении долота молотка. Таким образом, вибрация молотка 101 может быть эффективно смягчена или уменьшена.
После ударяющего движения долота 119 молотка на обрабатываемом объекте долото 119 молотка вынуждается отдавать силой реакции от обрабатываемого объекта. Сила, вызываемая этой отдачей, или сила реакции, перемещает ударный болт 145, позиционирующую деталь 151 и принимающую пружину деталь 167 назад и упруго деформирует смещающие пружины 165F, 165R. Конкретно, сила реакции, вызываемая отдачей долота 119 молотка, поглощается упругой деформацией смещающих пружин 165F, 165R так, что передача силы реакции к корпусу 103 уменьшается. В это время задняя металлическая шайба 157 позиционирующей детали 151 обращена к передней торцевой поверхности цилиндра 141 с заданным зазором между ними и может входить в соприкосновение с ней так, что определяется максимальная отведенная позиция позиционирующей детали 151. Поэтому действие поглощения силы реакции смещающими пружинами 165F, 165R совершается в диапазоне вышеупомянутого зазора.
Как описано выше, в этом варианте осуществления смещающие пружины 165F, 165R преобразователя 161 динамической вибрации используются, чтобы позиционировать корпус 103 по отношению к обрабатываемому объекту перед работой молотком и чтобы поглощать силу реакции, которую долото 119 молотка воспринимает от обрабатываемого объекта после своего ударяющего движения. Это означает, что пружина для поглощения силы реакции и пружина для преобразователя 161 динамической вибрации сформированы как одна общая часть, так что число частей, относящихся к уменьшению вибрации, может быть уменьшено, и структура может быть упрощена.
Кроме того, сила реакции отдачи долота 119 молотка подается к грузу 163 посредством ударного болта 145, позиционирующей детали 151, принимающей пружину детали 167, и смещающих пружин 165F, 165R. Конкретно, сила реакции отдачи долота 119 молотка служит в качестве средства вибрации для вибрирования (приведения) активно груза 163 преобразователя 161 динамической вибрации. Таким образом, преобразователь 161 динамической вибрации служит в качестве активного механизма уменьшения вибрации для уменьшения вибрации принудительной вибрацией, в которой груз 163 является активно приводимым. Поэтому вибрация, которая вызывается в корпусе 103 во время работы молотком, может быть дополнительно эффективно уменьшена или смягчена. В результате может быть гарантирована достаточная функция уменьшения вибрации даже в рабочих условиях, в которых, хотя уменьшение вибрации является крайне требуемым, только небольшая величина вибрации подается к преобразователю 161 динамической вибрации, и преобразователь 161 динамической вибрации не функционирует в достаточной мере, в частности, например, в работе, которая выполняется интенсивной силой пользователя нажатия, прикладываемой к электроинструменту.
Кроме того, в этом варианте осуществления позиционирование корпуса 103 выполняется смещающими пружинами 165F, 165R. С такой конструкцией сильным прижиманием долота 119 молотка к обрабатываемому объекту смещающие пружины 165F, 165R могут быть деформированы так, что ударному болту 145 позволяется двигаться дальше назад. Конкретно, согласно этому изобретению когда долото 119 молотка сильно прижимается к обрабатываемому объекту, величина движения ударяющего элемента 143 к поршню 129 может быть увеличена так, что усовершенствуется всасывание ударяющего элемента 143. Всасывание здесь представляет явление, в котором когда воздушная полость 141a расширяется отводящим движением поршня 129, воздух в воздушной полости 141a охлаждается, и давление воздушной полости 141a уменьшается, что заставляет ударяющий элемент 143 двигаться назад.
Кроме того, в этом варианте осуществления передняя смещающая пружина 165F преобразователя 161 динамической вибрации и витая пружина 159, которая смещает позиционирующую деталь 151 вперед, скомпонованы параллельно в радиальном направлении и в той же позиции на оси долота 119 молотка. Таким образом, может быть реализована эффективная конфигурация для экономии в пространстве. Кроме того, в этом варианте осуществления при нагруженных условиях, в которых долото 119 молотка прижимается к обрабатываемому объекту, задняя металлическая шайба 157 позиционирующей детали 151 обращена к передней торцевой поверхности цилиндра 141 с заданным зазором между ними и может входить в соприкосновение с ней так, что определяется максимальная отведенная позиция позиционирующей детали 151. Таким образом, долото 119 молотка и ударный болт 145, и ударяющий элемент 143, которые толкаются долотом 119 молотка, могут быть предотвращены от движения назад за упомянутую выше максимальную отведенную позицию.
Кроме того, в этом варианте осуществления груз 163 и смещающие пружины 165F, 165R, которые образуют преобразователь 161 динамической вибрации, скомпонованы по кольцу снаружи цилиндра 141. Таким образом, внешнее периферическое пространство цилиндра 141 может быть эффективно использовано. Кроме того, оно может быть скомпоновано так, что центры тяжести груза 163 и смещающих пружин 165F, 165R помещены на ось долота 119 молотка. В результате пара сил (сила бокового вращения вокруг оси, простирающейся поперек продольного направления долота молотка) может быть предотвращена от действия на корпус 103.
Ниже объясняется модификация к первому варианту осуществления со ссылкой на фиг.4-6. В описанном выше первом варианте осуществления смещающие пружины 165F, 165R преобразователя 161 динамической вибрации применяются, чтобы поглощать силу реакции, которую долото 119 молотка воспринимает от обрабатываемого объекта. Наоборот, в этой модификации предусмотрена витая пружина 171 сжатия, конкретно, выполненная с возможностью поглощать силу реакции. В других точках он имеет такую же конструкцию, как первый вариант осуществления. Компонентам или элементам в этой модификации, которые по существу идентичны тем, что в первом варианте осуществления даны одинаковые цифры, как в первом варианте осуществления, и не будут описаны. Витая пружина 171 сжатия является признаком, который соответствует «позиционирующему упругому элементу» в этом изобретении.
Витая пружина 171 сжатия расположена снаружи цилиндра 141. Один осевой конец (задний конец) витой пружины 171 сжатия удерживается в соприкосновении с передней поверхностью принимающего пружину кольца 173, которое закреплено к цилиндрической детали 108 посредством стопорного кольца 172, в то же время другой конец (передний конец) удерживается в соприкосновении с задней поверхностью передающей силу реакции детали в форме принимающей пружину детали 175. Принимающая пружину деталь 175 является кольцеподобным компонентом, имеющим выдающийся радиально наружу заплечик 175a. Принимающая пружину деталь 175 пригнана во внутренний диаметр цилиндрической детали 108 так, что она может скользить в осевом направлении долота молотка. Принимающая пружину деталь 175 толкается вперед (налево, как видно на чертежах) витой пружиной 171 сжатия, и заплечик 175a соприкасается со ступенчатой поверхностью 108a зацепления цилиндрической детали 108 сзади и обычно удерживается в этой позиции соприкосновения. В этом состоянии соприкосновения передний конец принимающей пружину детали 175 удерживается в соприкосновении с задней поверхностью задней металлической шайбы 157. Следовательно, при ненагруженных условиях, в которых долото 119 молотка не прижимается к обрабатываемому объекту, позиционирующая деталь 151 удерживается в соприкосновении с задним концом 137a держателя 137 инструмента, в то же время она отделена от конического участка 145c ударного болта 145. Это состояние показано на фиг.4.
Согласно модификации, имеющей описанную выше конструкцию, когда долото 119 молотка прижимается к обрабатываемому объекту для того, чтобы выполнять работу молотком, ударный болт 145 отводится вместе с долотом 119 молотка, и затем конический участок 145c ударного болта 145 соприкасается с передней металлической шайбой 155 позиционирующей детали 151. Задняя металлическая шайба 157 позиционирующей детали 151 находится в соприкосновении с принимающей пружину деталью 175, которая воспринимает силу смещения витой пружины 171 сжатия. Следовательно, витая пружина 171 сжатия упруго воспринимает силу пользователя нажатия прижимания долота 119 молотка к обрабатываемому объекту. Это состояние показано на фиг.5. Таким путем корпус 103 позиционируется по отношению к обрабатываемому объекту, и в этом состоянии выполняется работа молотком.
Когда долото 119 молотка вынуждается отдавать силой реакции от обрабатываемого объекта после ударяющего движения долота 119 молотка на обрабатываемом объекте сила, вызываемая этой отдачей, или сила реакции перемещает долото 119 молотка, позиционирующую деталь 151 и принимающую пружину деталь 167 назад и упруго деформирует витую пружину 171 сжатия. Конкретно, сила реакции, вызываемая отдачей долота 119 молотка, эффективно поглощается упругой деформацией витой пружины 171 сжатия так, что передача силы реакции к корпусу 103 уменьшается. Это состояние показано на фиг.6.
В этой модификации предотвращение холостого привода выполняется таким же путем, как в первом варианте осуществления.
Второй вариант осуществления изобретения
Второй вариант осуществления настоящего изобретения описывается сейчас со ссылкой на фиг.7-10.
На фиг.7 и 8 показан перфоратор 201, включающий в себя корпус 203, долото 219 молотка, съемным образом соединенное с областью конца вершины (на левой стороне, как видно на чертежах) корпуса 203 посредством держателя 237 инструмента, и рукоятку (не показана), которая присоединена к корпусу 203 или стороне, противоположной долоту 219 молотка, и выполнена с возможностью быть удерживаемой пользователем. Долото 219 молотка удерживается держателем 237 инструмента так, что ему позволяется двигаться возвратно-поступательно по отношению к держателю 237 инструмента в его осевом направлении и предотвращается от вращения по отношению к держателю 237 инструмента в его направлении по окружности. В настоящем варианте осуществления, ради удобства объяснения, сторона долота 219 молотка принимается в качестве передней стороны, и сторона рукоятки - в качестве задней стороны.
Корпус 203 включает в себя кожух 205 двигателя, который размещает приводной двигатель 211 (чей конец выходного вала двигателя показан), и кожух 207 редуктора, который размещает механизм 207 преобразования движения, механизм 214 передачи энергии и ударяющий механизм 215. Механизм 213 преобразования движения выполнен с возможностью надлежащим образом преобразовывать выход вращения приводного двигателя 211 к линейному движению и затем передавать его к ударяющему механизму 215. В результате ударная сила порождается в осевом направлении долота 219 молотка посредством ударяющего механизма 215. Кроме того, скорость выхода вращения приводного двигателя 211 надлежащим образом уменьшается механизмом 214 передачи энергии и затем передается к долоту 219 молотка. В результате долото 219 молотка вынуждается вращаться в направлении по окружности.
Механизм 213 преобразования движения включает в себя ведущую шестерню 221, которая вращается в вертикальной плоскости приводным двигателем 211, ведомую шестерню 223, входящую в зацепление с ведущей шестерней 221, вращающийся элемент 227, который вращается вместе с ведомой шестерней 223 посредством промежуточного вала 225, качающееся кольцо 229, которое вынуждается качаться в осевом направлении долота 219 молотка вращением вращающегося элемента 227, и цилиндрический поршень 241, который двигается возвратно-поступательно качательным движением качающегося кольца 229. Цилиндрический поршень 241 сформирован объединением цилиндра и поршня и поддерживается с возможностью скольжения цилиндрической направляющей 235 цилиндра. Цилиндрический поршень 241 является признаком, который соответствует «цилиндру» и «приводному элементу» согласно данному изобретению. Промежуточный вал 225 расположен параллельно (горизонтально) осевому направлению долота 219 молотка. Поверхность наружной стенки вращающегося элемента 227, пригнанного на ведомый вал 225, наклонена под заданным углом по отношению к оси промежуточного вала 225. Качающееся кольцо 229 поддерживается на наклонной поверхности наружной стенки вращающегося элемента 227 посредством подшипника 226 так, что оно может вращаться по отношению к вращающемуся элементу 227. Качающееся кольцо 229 качается в осевом направлении долота 229 молотка вращением вращающегося элемента 227. Вращающийся элемент 227 и качающееся кольцо 229, поддерживаемое с возможностью вращения на вращающемся элементе 227 посредством подшипника 226, образуют качающийся механизм.
Качающийся рычаг 228 сформирован в верхней области конца качающейся пружины 229 и простирается вверх (в радиальном направлении) от качающегося кольца 229. Качающийся рычаг 228 свободно пригнан в часть 224 зацепления, которая сформирована в заднем участке конца цилиндрического поршня 241. Цилиндрический поршень 241 расположен с возможностью скольжения в направляющей 235 цилиндра, и он приводится качательным движением (компоненты движения в осевом направлении долота 219 молотка) качающегося кольца 229 и движется возвратно-поступательно вдоль направляющей 235 цилиндра.
Механизм 214 передачи энергии включает в себя первую шестерню 231 передачи, которая вынуждается вращаться в вертикальной плоскости приводным двигателем 211 посредством ведущей шестерни 221 и промежуточного вала 225, вторую шестерню 233 передачи, которая входит в зацепление с первой шестерней 231 передачи, и направляющую 235 цилиндра, которая вынуждается вращаться вместе со второй шестерней 233 передачи. Вращательная приводная сила направляющей 235 цилиндра передается к держателю 237 инструмента и далее к долоту 219 молотка, удерживаемому держателем 237 инструмента. Направляющая 235 цилиндра может вращаться вокруг оси и в то же время предотвращается от движения в осевом направлении по отношению к кожуху 207 редуктора.
Ударный механизм 215 включает в себя ударяющий элемент 243, который расположен с возможностью скольжения во внутреннем диаметре цилиндрического поршня 241, и промежуточный элемент в форме ударного болта 245, который расположен с возможностью скольжения в держателе 237 инструмента и выполнен с возможностью передавать кинетическую энергию ударника 243 к долоту 219 молотка. Ударяющий элемент 243 приводится посредством действия воздушной пружины воздушной полости 241a цилиндрического поршня 241, которое вызывается движением скольжения цилиндрического поршня 241. Ударяющий элемент 243 затем сталкивается с (ударяет) ударным болтом 245, который расположен с возможностью скольжения в держателе 237 инструмента и передает ударяющую силу к долоту 219 молотка посредством ударного болта 245. Цилиндрический поршень 241, ударяющий элемент 243 и ударный болт 245 образуют приводной механизм инструмента. Ударный болт 245 и долото 219 молотка являются признаками, которые соответствуют «рабочей детали молотка» согласно этому изобретению.
Воздушные отверстия 241b для предотвращения холостого привода сформированы в цилиндрической части цилиндрического поршня 241 и обеспечивают связь между воздушной полостью 241a и наружной поверхностью. Кожух 257 кольца, имеющий уплотнительное кольцо для предотвращения холостого привода, расположен на переднем участке ударяющего элемента 243. Как показано на фиг.9 и 10, ударяющая часть 243a малого диаметра для ударения ударного болта 245 сформирована на стороне конца вершины (сторона переднего конца) ударника 243, и заплечик 243b сформирован на внешней периферии конца ударяющей части 243a и выдается из нее радиально наружу. Когда ударяющий элемент 243 двигается вперед мимо обычной позиции ударения (показано на фиг.8), заплечик 243b ударяющей части 243a движется вперед мимо уплотнительного кольца 258. Таким образом, уплотнительное кольцо 258 упруго захватывает ударяющий элемент 243. Это состояние показано на фиг.7. Когда ударяющий элемент 243 помещается в переднюю позицию, в которой он захвачен уплотнительным кольцом 258, предотвращающие холостой привод воздушные отверстия 241b открываются и обеспечивают связь с наружной поверхностью во время возвратно-поступательного движения цилиндрического поршня 241. Следовательно, воздух выпускается из или в воздушную полость 241a через воздушные отверстия 241b. Таким образом, ударяющий элемент 243 предотвращается от привода при ненагруженных условиях или холостом приводе.
При нагруженных условиях, в которых долото 219 молотка прижимается к обрабатываемому объекту, как показано на фиг.8, ударный болт 245 отводится вместе с долотом 219 молотка и, в свою очередь, толкает ударяющую часть 243a. В результате заплечик 243b ударяющей части 243a выводится из зацепления с уплотнительным кольцом 258. Таким образом, ударяющий элемент 243 освобождается от захватывания уплотнительным кольцом 258 и перемещается к задней позиции ударения. Когда ударник 243 помещается в позицию ударения, ударяющий элемент 243 сохраняет предотвращающие холостой привод воздушные отверстия 241b закрытыми во время возвратно-поступательного движения цилиндрического поршня 241. В результате разблокируется действие воздушной пружины воздушной полости 241a. Воздушные отверстия 241b, уплотнительное кольцо 258 и ударяющий элемент 243, как описано выше, образуют механизм предотвращения холостого привода. Воздушные отверстия 241b и ударяющий элемент 243 являются признаками, которые соответствуют «связующей части» и «детали открывания-закрывания связующей части» соответственно согласно этому изобретению.
Кроме того, кожух 257 кольца пригнан внутри направляющей 235 цилиндра на передней стороне конца, и стопорное кольцо 259, закрепленное к направляющей 235 цилиндра, предотвращает движение кожуха 257 кольца назад.
Механизм позиционирования корпуса 203 по отношению к обрабатываемому объекту, когда долото 219 молотка прижимается к обрабатываемому объекту, и механизм поглощения силы реакции, вызываемой отдачей долота 219 молотка во время работы молотка, сейчас описываются. Как показано на фиг.9 и 10, ударный болт 245 имеет ступенчатую цилиндрическую форму, имеющую участок 245a большого диаметра, участки 245b, 245c малого диаметра, сформированные на передней и задней сторонах участка 245a большого диаметра в осевом направлении, и передний и задний конические участки 245d, 245e, сформированные между участком 245a большого диаметра и передним и задним участками 245b, 245c малого диаметра. Передний и задний держатели 253, 255 колец позволяют ударному болту 245 свободно скользить в осевом направлении. Когда долото 219 молотка прижимается к обрабатываемому объекту и перемещается назад, ударный болт 245 отводится вместе с долотом 219 молотка. В это время задний конический участок 245e входит в соприкосновение с внутренним коническим участком 255a заднего держателя 255 кольца. Задний держатель 255 кольца является признаком, который соответствует «позиционирующей детали» согласно этому изобретению.
Задний держатель 255 кольца пригнан в передний участок конца направляющей 235 цилиндра так, что он может скользить в осевом направлении. Задний держатель 255 кольца расположен перед описанным выше кожухом 257 кольца и обращен к нему. Витая пружина 251 сжатия для поглощения силы реакции расположена между кожухом 257 кольца и задним держателем 255 кольца. Следовательно, когда долото 219 молотка прижимается к обрабатываемому объекту, сила прижимания долота 219 молотка к обрабатываемому объекту упруго воспринимается витой пружиной 251 сжатия посредством заднего держателя 255 кольца. Таким образом, корпус 103 позиционируется по отношению к обрабатываемому объекту. В это время витая пружина 251 сжатия выполнена с возможностью обычно иметь избыточное давление, большее, чем сила пользователя прижимания долота 119 молотка к обрабатываемому объекту. Витая пружина 251 сжатия является признаком, который соответствует «позиционирующему упругому элементу» и «витой пружине», и кожух 257 кольца соответствует «детали покрытия» согласно этому изобретению.
Кроме того, задний держатель 255 кольца имеет ступенчатую наружную форму, имеющую участок 255b большого диаметра на передней стороне и участок 255c малого диаметра на задней стороне. Осевая передняя область витой пружины 251 сжатия помещена над участком 255c малого диаметра. Осевой передний конец витой пружины 251 сжатия удерживается в соприкосновении со ступенчатой поверхностью 255d зацепления, сформированной между участком 255b большого диаметра и участком 255c малого диаметра заднего держателя 255 кольца, в то же время задний конец витой пружины 251 сжатия удерживается в контакте с передней поверхностью кожуха 257 кольца. Таким образом, точка соприкосновения между витой пружиной 251 сжатия и задним держателем 255 кольца располагается перед точкой контакта между ударным болтом 245 и задним держателем 251 кольца.
Теперь объясняется работа молоткового перфоратора 201, сконструированного, как описано выше. Когда приводится приводной двигатель 211, вращающийся элемент 227 вынуждается вращаться в вертикальной плоскости посредством ведомой шестерни 223, входящей в зацепление с ведущей шестерней 221 и промежуточным валом 225. Качающееся кольцо 229 и качающийся рычаг 228 затем качаются. Цилиндрический поршень 241 затем вынуждается скользить линейно качательным движением качающегося рычага 228. В это время, если ударник 243 захватывается уплотнительным кольцом 258 при ненагруженных условиях, в которых долото 219 молотка не прижимается к обрабатываемому объекту, ударяющий элемент 243 помещается в переднюю позицию для открывания воздушных отверстий 241b. Следовательно, когда цилиндрический поршень 241 перемещается вперед или назад, воздух выпускается из или в воздушную полость 241a через воздушные отверстия 241b. Таким образом, предотвращается холостой привод долота 219 молотка.
При нагруженных условиях, в которых долото 219 молотка прижимается к обрабатываемому объекту, как показано на фиг.8, ударный болт 245 толкается назад вместе с долотом 219 молотка и, в свою очередь, толкает ударяющий элемент 243 назад так, что ударяющий элемент 243 закрывает воздушные отверстия 241b. Таким образом, ударяющий элемент 243 двигается возвратно-поступательно в цилиндре 241 и сталкивается с (ударяет) ударным болтом 245 действием функции воздушной пружины воздушной полости 241a цилиндрического поршня 241 в результате движения скольжения цилиндрического поршня 241. Кинематическая энергия ударяющего элемента 243, которая вызывается столкновением с ударным болтом 245, передается к долоту 219 молотка.
Когда первая шестерня 231 передачи вращается вместе с промежуточным валом 225, направляющая 235 цилиндра вынуждается вращаться в вертикальной плоскости посредством второй шестерни 233 передачи, которая входит в зацепление с первой шестерней 231 передачи. Кроме того, держатель 237 инструмента и долото 219 молотка, удерживаемое держателем 237 инструмента, вынуждаются вращаться вместе с направляющей 235 цилиндра. Таким образом, долото 219 молотка выполняет движение удара молотком в осевом направлении и движение сверления в направлении по окружности так, что работа молоткового перфоратора выполняется на обрабатываемом объекте.
Как описано выше, работа молотковым перфоратором выполняется при нагруженных условиях, в которых долото 219 молотка прижимается к обрабатываемому объекту. Когда долото 219 молотка прижимается к обрабатываемому объекту, долото 219 молотка толкается назад и отводит ударный болт 245. Отводимый ударный болт 245 входит в соприкосновение с задним держателем 255 кольца. Таким образом, сила пользователя нажатия прижимания долота 219 молотка к обрабатываемому объекту упруго воспринимается витой пружиной 251 сжатия. В результате корпус 203 позиционируется по отношению к обрабатываемому объекту, и в таком состоянии выполняется работа молотковым перфоратором.
После ударяющего движения долота 219 молотка на обрабатываемом объекте долото 219 молотка вынуждается отдавать силой реакции от обрабатываемого объекта. Сила, вызываемая этой отдачей, или сила реакции, перемещает ударный болт 245 и задний держатель 255 кольца назад и упруго деформирует витую пружину 251 сжатия. Конкретно, сила реакции, вызываемая отдачей долота 219 молотка, эффективно поглощается упругой деформацией витой пружины 251 сжатия так, что передача силы реакции к корпусу 203 уменьшается. В это время задняя торцевая поверхность заднего держателя 255 кольца обращена к передней торцевой поверхности кожуха 257 кольца с заданным зазором между ними так, что определяется максимальная отведенная позиция заднего держателя 255 кольца. Поэтому действие поглощения силы реакции витой пружины 251 сжатия совершается в диапазоне вышеупомянутого зазора.
Как описано выше, в этом варианте осуществления витая пружина 251 сжатия используется, чтобы позиционировать корпус 203 по отношению к обрабатываемому объекту перед работой молотковым перфоратором и чтобы поглощать силу реакции, которую долото 219 молотка воспринимает от обрабатываемого объекта после своего ударяющего движения. С такой конструкцией по сравнению с конструкцией, например, в которой резиновое кольцо используется, чтобы поглощать силу реакции, жесткость пружины может быть уменьшена, и эффект поглощения силы реакции может быть улучшен.
Кроме того, в этом варианте осуществления задний держатель 255 кольца имеет участок 255c малого диаметра на задней стороне, и витая пружина 251 сжатия помещена над участком 255c малого диаметра. Конкретно, она сконфигурирована так, что осевая передняя область витой пружины 251 сжатия помещена над наружным участком заднего держателя 255 кольца, и точка соприкосновения между витой пружиной 251 сжатия и задним держателем 255 кольца располагается перед точкой соприкосновения между ударным болтом 245 и задним держателем 255 кольца. С этой конструкцией, гарантирующей заданную величину упругой деформации витой пружины 251 сжатия, которая требуется, чтобы поглощать силу реакции, витая пружина 251 сжатия может быть уменьшена в длине в осевом направлении молоткового перфоратора 201.
Далее описана модификация второго варианта осуществления со ссылкой на фиг.11 и 12. В описанном выше втором варианте осуществления во время работы молотковым перфоратором, когда витая пружина 251 сжатия толкается при избыточной прижимающей нагрузке сверх установленного значения и смежные витки витой пружины 251 сжатия входят в тесное касание друг с другом, большой удар на витую пружину 251 сжатия может повредить или сломать витую пружину 251 сжатия. Или сила реакции может быть непосредственно передана к стороне корпуса 203 соприкосновением заднего держателя 255 кольца с кожухом 257 кольца.
Соответственно, в этой модификации, дополнительно к витой пружине 251 сжатия предусмотрена амортизирующая деталь 261 между задним держателем 255 и кожухом 257 кольца для того, чтобы поглощать силу реакции во время работы молотковым перфоратором. Амортизирующая деталь 261 является признаком, который соответствует «ограничителю» согласно этому изобретению.
Амортизирующая деталь 261 сформирована в кольцеподобной форме уретаном или резиной. Амортизирующая деталь 261 монтируется радиально наружу из витой пружины 251 сжатия и в кольцевой монтажной канавке 257a, сформированной в передней поверхности кожуха 257 кольца, и выдается на заданную протяженность вперед из передней поверхности. Амортизирующая деталь 261 может быть смонтирована на стороне заднего держателя 255 кольца.
Согласно модификации, имеющей описанную выше конструкцию, во время работы молотковым перфоратором, когда витая пружина 251 сжатия подвергается действию большой прижимающей нагрузки сверх установленного значения, амортизирующая деталь 261 входит в соприкосновение с задней поверхностью заднего держателя 255 кольца, как показано на фиг.12. Конкретно, амортизирующая деталь 261 соприкасается с задней поверхностью заднего держателя 255 кольца перед тем, как витки вступят в тесное касание друг с другом. Поэтому витая пружина 251 сжатия может быть защищена против удара, который действует на нее тесным касанием. Кроме того, поглощение силы реакции может быть дополнительно улучшено упругой деформацией амортизирующей детали 261.
В описанном выше первом варианте осуществления механизм предотвращения холостого привода для предотвращения холостого привода долота 119 молотка при ненагруженных условиях было описано, как являющееся типом, который управляет открыванием и закрыванием воздушных отверстий 141b цилиндра 141 посредством ударяющего элемента 143. Однако механизм предотвращения холостого привода не ограничен этим. Например, он может быть сконфигурирован так, что деталь клапана, сформированная на скользящей муфте, расположенной с возможностью скольжения снаружи цилиндра 141, перемещается позиционирующей деталью 151 и тем самым управляет открыванием и закрыванием воздушных отверстий 141b. В этом случае скользящая муфта обычно смещается пружиной вперед и удерживается в открытой позиции для открывания воздушных отверстий 141b. При нагруженных условиях, в которых долото 119 молотка прижимается к обрабатываемому объекту, скользящая муфта перемещается к закрытой позиции для закрывания воздушных отверстий 141b посредством позиционирующей детали 151 ударным болтом 145, отводимым вместе с долотом 119 молотка. Скользящая муфта соответствует «подвижной детали» согласно этому изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2466854C2 |
| ИНЕРЦИОННО-УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2006 |
|
RU2341366C2 |
| УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2008 |
|
RU2478034C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2520242C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2544971C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2008 |
|
RU2477213C2 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2009 |
|
RU2496631C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2009 |
|
RU2505390C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2507060C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2010 |
|
RU2563417C2 |






Изобретение относится к ударным инструментам. Ударный инструмент содержит корпус, ударник и преобразователь динамической вибрации. Преобразователь динамической вибрации содержит груз, выполненный с возможностью линейного передвижения под действием силы смещения позиционирующего упругого элемента. Позиционирующий упругий элемент контактирует с ударником, позиционирует корпус инструмента по отношению к обрабатываемому объекту при прижатии ударника к обрабатываемому объекту и толкании ударника к корпусу инструмента для выполнения ударного действия ударника. При этом позиционирующий упругий элемент поглощает силу реакции, созданную отдачей от обрабатываемого объекта и действующей на ударник при выполнении ударником ударного действия на обрабатываемом объекте. В результате уменьшается вибрация ударного инструмента. 8 з.п. ф-лы, 12 ил.
1. Ударный инструмент, содержащий корпус инструмента, ударник, осуществляющий заданное ударное действие на обрабатываемом объекте ударяющим движением в осевом направлении, преобразователь динамической вибрации, имеющий груз, способный линейно двигаться под действием силы смещения упругого элемента и уменьшающий вибрацию во время действия ударника движением груза в осевом направлении ударника, позиционирующий упругий элемент, образованный упругим элементом преобразователя динамической вибрации, контактирующий с ударником, позиционирующий корпус инструмента по отношению к обрабатываемому объекту при прижатии ударника к обрабатываемому объекту и толкании ударника к корпусу инструмента для выполнения ударного действия ударника и поглощающий силу реакции, созданную отдачей от обрабатываемого объекта и действующую на ударник при выполнении ударником ударного действия на обрабатываемом объекте.
2. Ударный инструмент по п.1, который дополнительно содержит приводной механизм, линейно перемещающий ударник, и цилиндр, в котором размещен приводной механизм, при этом груз и упругий элемент, образующие преобразователь динамической вибрации, расположены по кольцу снаружи цилиндра.
3. Ударный инструмент по п.1, в котором сила реакции, действующая на ударник, служит в качестве средства вибрации для активной вибрации груза посредством упругого элемента.
4. Ударный инструмент по п.1, который дополнительно содержит цилиндр, размещенный в корпусе инструмента, приводной элемент, линейно перемещающийся в осевом направлении ударник, ударяющий элемент, линейно перемещающийся в осевом направлении ударника в цилиндре, и воздушную полость, образованную между приводным элементом и ударяющим элементом в цилиндре, при этом ударяющий элемент способен линейно перемещаться посредством колебаний давления в воздушной полости в результате линейного перемещения приводного элемента и ударять ударник для выполнения заданного ударяющего действия на обрабатываемом объекте, позиционирующую деталь, удерживаемую в контакте с ударником при нагруженных условиях, в которых ударник прижимается к обрабатываемому объекту и толкается к стороне приводного элемента, причем позиционирующая деталь отделена от ударника при ненагруженных условиях, в которых ударник не прижимается к обрабатываемому объекту, упругодеформируемый позиционирующий упругий элемент, позиционирующий корпус инструмента по отношению к обрабатываемому объекту посредством контакта с позиционирующей деталью при нагруженных условиях и поглощающий силу реакции, созданную отдачей от обрабатываемого объекта и подаваемой от ударника посредством позиционирующей детали, связующую часть, обеспечивающую связь между воздушной полостью и внешней средой для предотвращения холостого долота ударника, и деталь открывания-закрывания связующей части, содержащую ударяющий элемент, расположенный внутри цилиндра, или подвижную деталь, расположенную снаружи цилиндра, причем деталь открывания-закрывания связующей части подвижна между закрытой позицией для закрывания связующей части и открытой позицией для открывания связующей части, при этом при ненагруженных условиях деталь открывания-закрывания связующей части помещена в открытую позицию для открывания связующей части и предотвращения колебания давления воздушной полости, а при нагруженных условиях деталь открывания-закрывания связующей части толкается ударником или позиционирующей деталью к закрытой позиции для закрывания связующей части и разрешения колебания давления воздушной полости.
5. Ударный инструмент по п.4, который дополнительно содержит упругую деталь, смещающую позиционирующую деталь вперед от ударяющего элемента.
6. Ударный инструмент по п.5, в котором позиционирующий упругий элемент и упругая деталь расположены параллельно в радиальном направлении и в одной и той же позиции на оси ударника.
7. Ударный инструмент по п.4, в котором позиционирующая деталь содержит кольцевую деталь, расположенную на ударнике и контактирующую с наружным участком ударника сзади, деталь наружного покрытия, обращенную к позиционирующей детали с заданным зазором между ними и расположенную позади позиционирующей детали в корпусе инструмента с предотвращением от движения назад, а позиционирующий упругий элемент содержит витую пружину, расположенную между позиционирующей деталью и деталью наружного покрытия.
8. Ударный инструмент по п.7, в котором осевая передняя область витой пружины помещена над наружным участком позиционирующей детали, и передний конец витой пружины удерживается в контакте с позиционирующей деталью и расположен перед точкой контакта между ударником и позиционирующей деталью.
9. Ударный инструмент по п.7, который содержит ограничитель, расположенный на одной из позиционирующей детали и детали наружного покрытия и упругодеформируемый контактом с другой из позиционирующей детали и детали наружного покрытия перед контактом витков витой пружины при поглощении силы реакции деформацией сжатия витой пружины.
| US 2002050191 A1, 02.05.2002 | |||
| US 2003094292 A1, 22.05.2003 | |||
| МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ | 2004 |
|
RU2268818C2 |
| Устройство преобразования размаха сигнала цветовой поднесущей в постоянное напряжение | 1984 |
|
SU1252976A1 |

