Область техники
Настоящее изобретение относится к хирургическому режуще-сшивающему скобками аппарату, применяемому для диагностики и лечения заболеваний, в которых применяется резекция с ушиванием. Более конкретно, настоящее изобретение относится к хирургическому режуще-сшивающему аппарату, выполненному с возможностью вращения рабочего органа для облегчения доступа к месту операции.
Описание известного уровня техники
Хирургические режуще-сшивающие аппараты обычно используются для диагностики и лечения заболеваний, в которых применяется резекция с ушиванием. В хирургических сшивающих аппаратах предусмотрен механизм, который увеличивает длину внутрипросветного применения механических сшивающих устройств, вводимых через анальный канал, рот, желудок, и служебного доступа. Хотя хирургические режуще-сшивающие аппараты чаще всего используются при лечении заболеваний прямой кишки, их также можно использовать и для целого ряда других заболеваний.
Хирургические режуще-сшивающие аппараты разрабатываются уже в течение длительного времени. Эти аппараты обычно содержат несущий конструктивный элемент, упор, присоединенный к несущему элементу, и модуль кассеты, содержащий множество скобок. Аппараты также включают в себя толкатель внутри модуля кассеты, который толкает одновременно все скобки к упору для придания им формы буквы "В", сшивающей ткани. Кроме того, эти аппараты имеют механизмы сближения для перемещения модуля кассеты из положения, удаленного от упора, при котором ткань размещается между ними, в сомкнутое положении, при котором ткань зажимается между упором и модулем кассеты. И наконец, эти аппараты имеют пусковые средства для перемещения толкателя скобок вперед и формирования скобок на упоре.
После размещения аппарата в полости тела необходимо правильно сориентировать концевой рабочий орган относительно ткани, требующей резекции. Обычно это делается путем изменения ориентации всего аппарата, т.е. рукояти, стержня и рабочего органа, так как они жестко соединены друг с другом вдоль продольной оси аппарата. Однако это ограничивает возможность изменения ориентации рабочего органа, поскольку его ориентация ограничена отверстием доступа, через которое хирургический режуще-сшивающий аппарат введен в тело.
Таким образом, существует потребность в хирургическом режуще-сшивающем скобками аппарате, позволяющем изменять ориентацию рабочего органа без необходимости в изменении ориентации рукоятки и стержня, выступающего из отверстия в теле. Такой механизм предложен в настоящем изобретении.
Краткое изложение сущности изобретения
Таким образом, в основу настоящего изобретения положена задача создания ротационного хирургического степлера, имеющего проксимальный конец и дистальный конец. Хирургический степлер содержит рукоятку на проксимальном конце и рабочий орган надистальном конце для осуществления избирательного поворота, позволяющего улучшить доступ к ткани, требующей лечения, и облегчить использование предложенного линейного хирургического степлера. Несущий стержень соединяет рукоятку с рабочим органом и имеет продольную ось. Рабочий орган присоединен к несущему стержню для поворота вокруг продольной оси степлера.
Задачей настоящего изобретения также является создание хирургического степлера, в котором проксимальный конец несущего стержня присоединен к рукоятке для поворота относительно нее, и несущий стержень избирательно поворачивается относительно рукоятки для облегчения поворота рабочего органа, закрепленного на дистальном конце несущего стержня.
Другой задачей настоящего изобретения является создание хирургического степлера, содержащего артикуляционный механизм, расположенный между несущим стержнем и рабочим органом, для обеспечения избирательного движения концевого рабочего органа относительно несущего стержня, причем артикуляционный механизм содержит шаровой шарнир, соединяющий рабочий орган с несущим стержнем.
Еще одной задачей настоящего изобретения является создание хирургического степлера, содержащего артикуляционный механизм, расположенный между несущим стержнем и концевым рабочим органом для обеспечения избирательного движения рабочего органа относительно несущего стержня, причем артикуляционный механизм содержит шаровой шарнир, соединяющий рабочий орган с несущим стержнем, вращательный стержень проходит через канал, образованный в шаровом шарнире, и жестко прикреплен к рабочему органу для регулируемого поворота рабочего органа при повороте вращательного стержня.
Следующей задачей настоящего изобретения является создание хирургического степлера, имеющего блокировочный механизм, связанный с шаровым шарниром, для обеспечения избирательной блокировки рабочего органа в заданной ориентации и избирательной разблокировки рабочего органа для осуществления регулируемого перемещения в случае необходимости.
Еще одной задачей настоящего изобретения является создание хирургического степлера, в котором блокировочный механизм содержит трубку блокировки/деблокировки шарика.
Задачей настоящего изобретения является создание хирургического степлера, в котором шаровой шарнир содержит шарик с фасонной внешней поверхностью, размеры и форма которого обеспечивают сцепление с дистальным концом трубки блокировки/деблокировки шарика.
Еще одной задачей настоящего изобретения является создание хирургического степлера, в котором шаровой шарнир содержит шарик с фасонной внешней поверхностью, форма и размеры которого обеспечивают "блокировку" с дистальным концом трубки блокировки/деблокировки шарика.
Следующей задачей настоящего изобретения является создание хирургического степлера, в котором предусмотрены подшипники между стержнем на проксимальном конце рабочего органа и дистальным концом несущего стержня.
Другой задачей настоящего изобретения является создание хирургического степлера, в котором вращательный стержень жестко присоединен к рабочему органу для регулируемого поворота рабочего органа при повороте вращательного стержня.
Задачей настоящего изобретения также является создание хирургического степлера, в котором рабочий орган имеет изогнутую форму.
Еще одной задачей настоящего изобретения является создание хирургического степлера, в котором рабочий орган является хирургическим скрепляющим узлом, содержащим модуль кассеты и несущий конструктивный элемент.
Следующей задачей настоящего изобретения является создание хирургического степлера, в котором рабочий орган содержит предохранительный блокировочный механизм, препятствующий пуску ранее сработавшего модуля кассеты.
Задачей настоящего изобретения является создание хирургического степлера, в котором модуль кассеты содержит корпус кассеты, соединенный с упором.
Следующей задачей настоящего изобретения является создание хирургического степлера, содержащего приводной тросик, проходящий от рукояти до рабочего органа, для приведения в действие модуля кассеты.
Задачей настоящего изобретения является создание хирургического степлера, в котором корпус кассеты имеет выемку, форма и размеры которой позволяют скользяще принимать нажимную муфту, внутри которой находится в зацеплении резьбовой дистальный конец приводного тросика, для перемещения корпуса кассеты и нажимной муфты к упору.
Задачей настоящего изобретения также является создание хирургического степлера, в котором нажимная муфта избирательно выводится из зацепления с корпусом кассеты, что позволяет нажимной муфте продолжать движение вперед, прижимая нож и скобки с корпусом кассеты к упору.
Еще одной задачей настоящего изобретения является создание хирургического степлера, дополнительно содержащего противовозвратный механизм, препятствующий нежелательному обратному движению корпуса кассеты.
Задачей настоящего изобретения является создание хирургического степлера, содержащего гибкий приводной тросик для стопорного штифта, приводящий в движение стопорный штифт.
Другие задачи и преимущества настоящего изобретения станут понятными из следующего подробного описания изобретения при его рассмотрении в совокупности с прилагаемыми чертежами, на которых представлены определенные варианты реализации изобретения.
Краткое описание чертежей
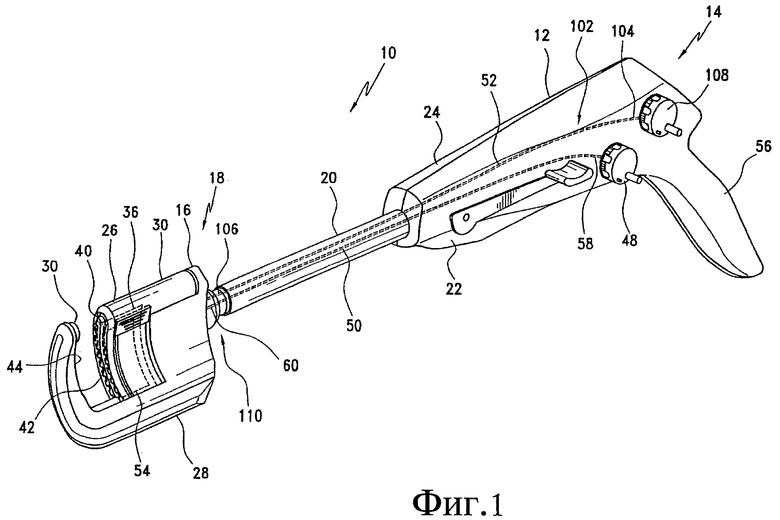
Фиг.1 изображает перспективный вид хирургического степлера согласно настоящему изобретению.
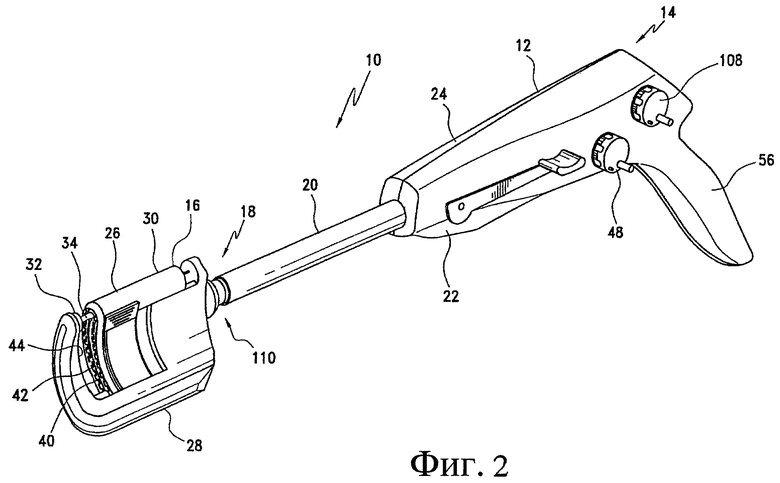
Фиг.2 изображает перспективный вид хирургического степлера, показанного на фиг.1, с приведенной в действие кассетой.
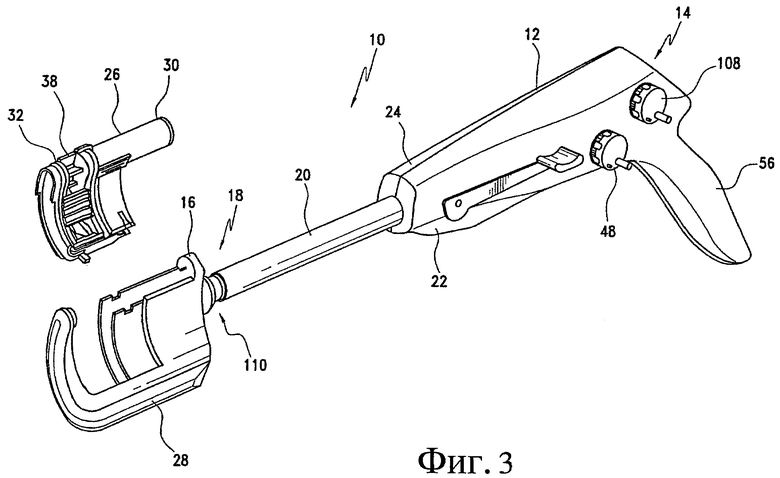
Фиг.3 изображает перспективный вид хирургического степлера, показанного на фиг.1, с удаленной кассетой.
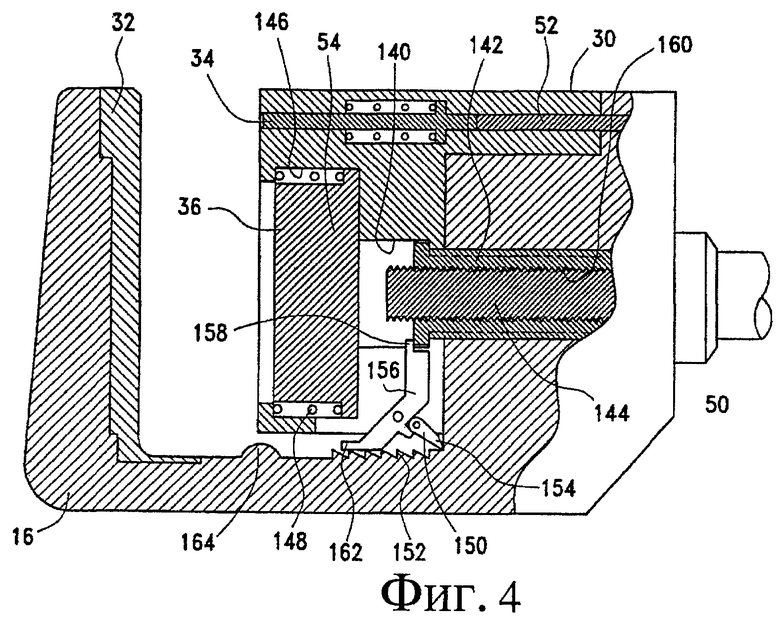
Фиг.4, 5, 6 и 7 изображают поперечные сечения рабочего органа, показывающие приведение кассеты в действие.
Фиг.8 изображает детальный вид, показывающий трансмиссию согласно предпочтительному варианту настоящего изобретения.
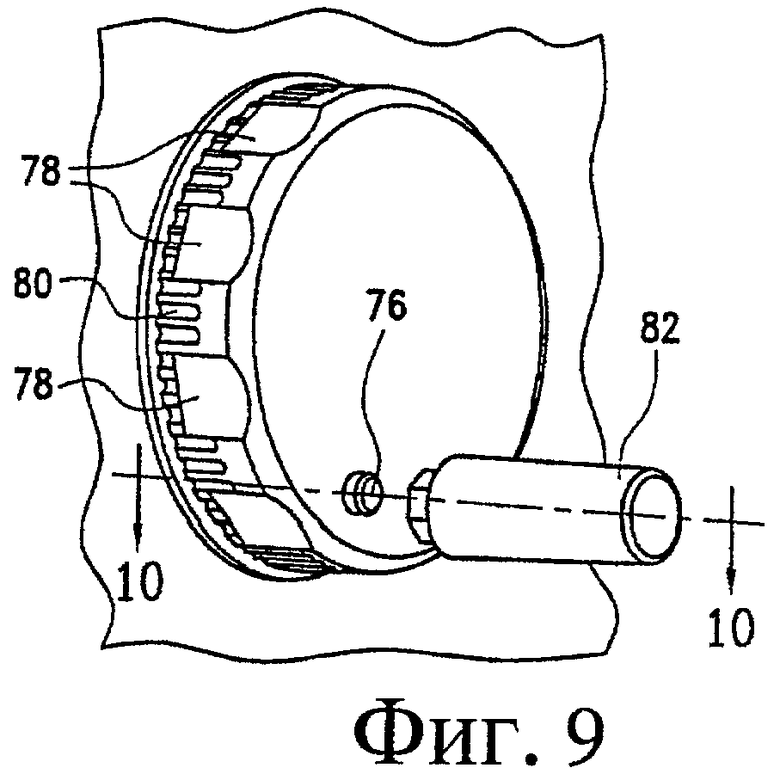
Фиг.9 изображает перспективный вид угловой рукоятки, использованной в варианте, показанном на фиг.8.
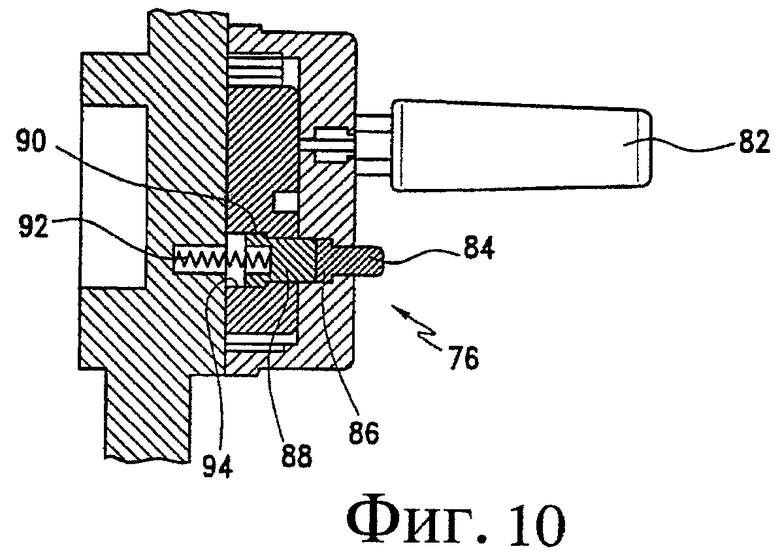
Фиг.10 изображает вид трансмиссии в поперечном сечении.
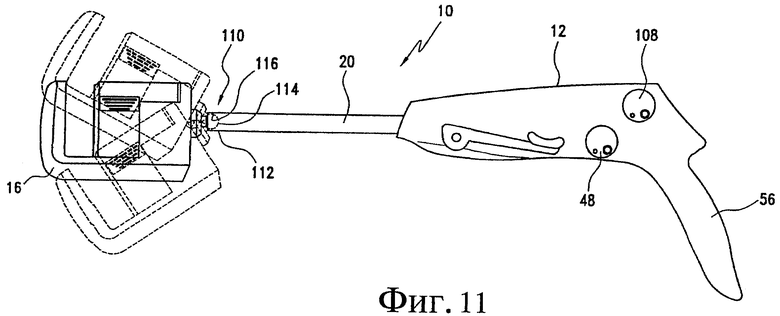
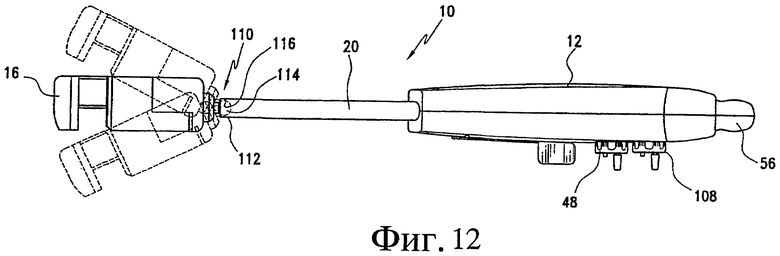
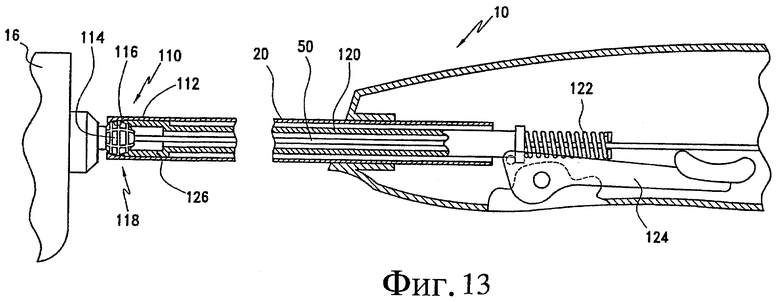
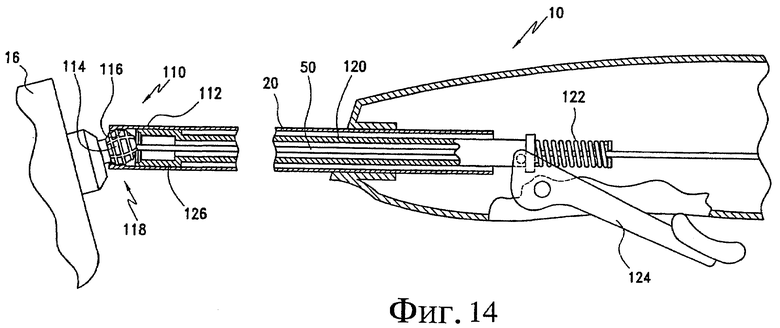
Фиг.11, 12, 13 и 14 показывают различные виды шарового шарнира, использованного в варианте настоящего изобретения со ссылкой на фиг.1.
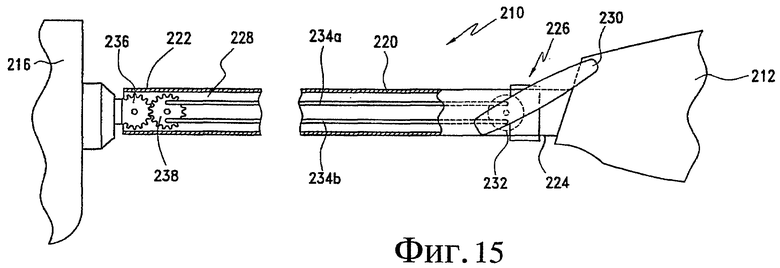
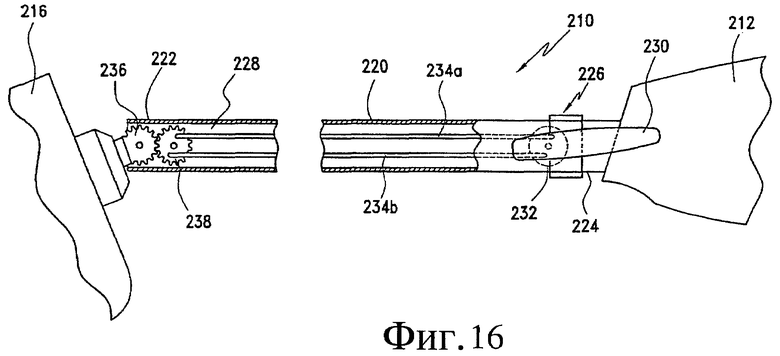
Фиг.15 и 16 изображают еще один вариант осуществления настоящего изобретения.
Фиг.17 и 18 изображают еще один предпочтительный вариант осуществления настоящего изобретения.
Фиг.19, 20 и 21 изображают механизм разъединения для использования в настоящем изобретении.
Фиг.22 и 23 изображают систему, обеспечивающую поворот рабочего органа согласно настоящему изобретению.
Описание предпочтительных вариантов изобретения
Далее будут подробно описаны варианты реализации настоящего изобретения. Однако при этом следует понимать, что описанные варианты являются всего лишь примерами изобретения, которое может быть реализовано в различных формах. Поэтому описанные детали следует толковать не в ограничительном смысле, а всего лишь как основу для притязаний и в качестве информации для специалиста, как осуществить и/или использовать изобретение.
На фиг.1-10 изображен хирургический режуще-сшивающий скобками аппарат, более конкретно линейный хирургический степлер 10. Линейный хирургический степлер 10 предназначен для выполнения разрезов и сшивания ткани скобками. Линейный хирургический степлер 10 имеет рукоятку 12 на проксимальном конце 14 и рабочий орган 16 на противоположном дистальном конце 18. Как будет более подробно описано ниже, рабочий орган 16 закреплен так, что им можно избирательно артикулировать для улучшения доступа к ткани, требующей лечения, и облегчения использования линейного хирургического степлера 10.
В предпочтительном варианте настоящего изобретения рабочий орган 16 изогнут, хотя специалистам будет понятно, что можно использовать рабочие органы различной формы, не выходя за рамки идеи настоящего изобретения. Несущий стержень 20 соединяет рукоятку 12 с рабочим органом 16 аппарата. В предпочтительном варианте настоящего изобретения рукоятка 12 имеет насадки 22, 24 для правой и левой руки. Рукоятка 12 также имеет часть корпуса для захвата и маневрирования линейным хирургическим степлером 10.
Рабочий орган 16 представляет собой хирургический прикрепляемый узел, который включает в себя модуль кассеты 26 и С-образный несущий элемент 28. Термин "С-образный" в данном контексте означает вогнутую форму несущего элемента 28 и сменной кассеты 26. С-образный элемент улучшает функциональные возможности, и термин "С-образный" в данном описании охватывает различные вогнутые формы, которые аналогичным образом улучшают функциональные возможности хирургического режуще-сшивающего аппарата. Форма и размеры рабочего органа 16 позволяют принимать модуль кассеты 26. Рабочий орган 16 также содержит предохранительный блокировочный механизм, препятствующий пуску ранее отработавшей кассеты. Хотя рабочий орган описан ниже как предназначенный для применения вместе со сменным модулем кассеты, содержащим различные компоненты, идею настоящего изобретения можно применить к различным видам рабочего органа и конструкциям модулей кассет, не выходя за рамки идеи изобретения.
Как будет понятно из следующего описания, предложенный линейный хирургический степлер 10 выполнен как устройство, рассчитанное на множество пусков, со сменной кассетой 26. Однако следует понимать, что многие идеи настоящего изобретения можно в равной степени применить в устройствах, рассчитанных на однократный пуск, не выходя за рамки объема изобретения.
Более конкретно и согласно предпочтительным вариантам изобретения модуль кассеты 26 содержит корпус 30 кассеты, соединенный с упором 32. Модуль кассеты 2 6 также имеет стопорный штифт 34, нож 36, съемный ограничитель 38, контактирующую с тканью поверхность 40, которая имеет множество содержащих скобки прорезей 42, расположенных в шахматном порядке в один или несколько рядов (т.е. линий сшивания), с каждой стороны ножа 36. Скобки (не показаны) выстреливают из корпуса 30 кассеты к формирующей скобки поверхности 44 упора 32, которая обращена к контактирующей с тканью поверхности 40 модуля кассеты 30.
Как будет более подробно описано ниже, модуль кассеты 26 работает следующим образом. После соответствующей установки модуля кассеты 26 приводится в действие угловая рукоятка 48, установленная вдоль рукоятки 12, для поворота приводного тросика 50, который приводит в действие рабочий орган 16 линейного хирургического степлера 10. Первоначальное приведение в действие приводного тросика 50 вызывает первоначальное закрытие модуля кассеты 26. Это значит, что приводной тросик 50 вынуждает корпус 30 кассеты перейти из ее полностью открытого положения в положение, промежуточное между открытым и закрытым положениями. После того как корпус 30 кассеты перейдет в промежуточное положение, приводится в движение приводной тросик 52 стопорного штифта, который перемещает стопорный штифт 34 вперед из корпуса 30 кассеты в отверстие в упоре 32. В этом положении можно должным образом позиционировать ткань, находящуюся между корпусом 30 кассеты и упором 32, и зафиксировать ткани между корпусом 30 кассеты и упором 32. После приведения в действие приводного тросика 50 для перемещения корпуса 30 кассеты в промежуточное положение корпус 30 кассеты и упор 32 размещаются соответствующим образом в своих фиксирующих ткань положениях.
При дальнейшем повороте приводного тросика 50 с перемещением корпуса 30 кассеты вперед контактирующая с тканью поверхность 40 корпуса 30 кассеты и формирующая скобки поверхность 4 4 упора 32 располагаются рядом друг с другом и позиционируются должным образом, так что удерживаемая ими ткань полностью зажимается. После этого приводной тросик 50 поворачивается дальше, продвигая толкатель 54 скобок вперед, при этом скобки выстреливаются и нож 36 продвигается вперед для разрезания ткани.
Рукоятка 12 линейного хирургического степлера 10 содержит ручку 56, на которую хирург накладывает ладонь. Ручка 56 состоит из насадки 24 для правой руки и насадки 22 для левой руки. Доступ пользователя к описанной выше угловой рукоятке 48 или другому приводимому в действие пользователем механизму, предназначенному для приведения в действие пускового механизма хирургического режуще-сшивающего аппарата 10, осуществляется вдоль рукоятки 12 линейного хирургического степлера 10.
Так как для артикуляции рабочего органа 16 относительно несущего стержня 20 и рукоятки 12 требуется, чтобы пусковой механизм был способен изгибаться при артикуляции рабочего органа 16, как было кратко описано выше, рукоятка 12 связана с рабочим органом 16 через гибкий приводной тросик 50. Более конкретно, пусковой механизм предложенного линейного хирургического степлера приводится в действие гибким приводным тросиком 50, имеющим проксимальный конец 58 и дистальный конец 60. Приводной тросик 50 регулируемым образом активизирует движение корпуса 30 кассеты, толкателя 54 скобок и ножа 36. В частности, приводной тросик 50 простирается от рукоятки 12 линейного хирургического степлера 10 до корпуса 30 кассеты, толкателя 54 скобок и ножа 36, расположенных в рабочем органе 16 линейного хирургического степлера 10.
На проксимальном конце 58 приводного тросика 50 предусмотрен приводимый в действие пользователем элемент 48. Например, согласно предпочтительному варианту изобретения, приводимым в действие пользователем элементом является угловая рукоятка 48, которую пользователь может избирательно поворачивать для передачи по длине приводного тросика 50 крутящего момента, преобразуемого в конечном итоге в линейные движения корпуса 30 кассеты, толкателя 54 скобок и ножа 36.
Что касается дистального конца 60 приводного тросика 50, то он соединен посредством резьбы с корпусом 30 кассеты, толкателем 54 скобок и ножом 36, что позволяет линейно перемещать эти элементы после регулируемого поворота приводного тросика 50. При повороте приводного тросика 50 корпус 30 кассеты, толкатель 54 скобок и нож 36 перемещаются к упору 32 регулируемым образом, обеспечивая сшивание и разрезание ткани.
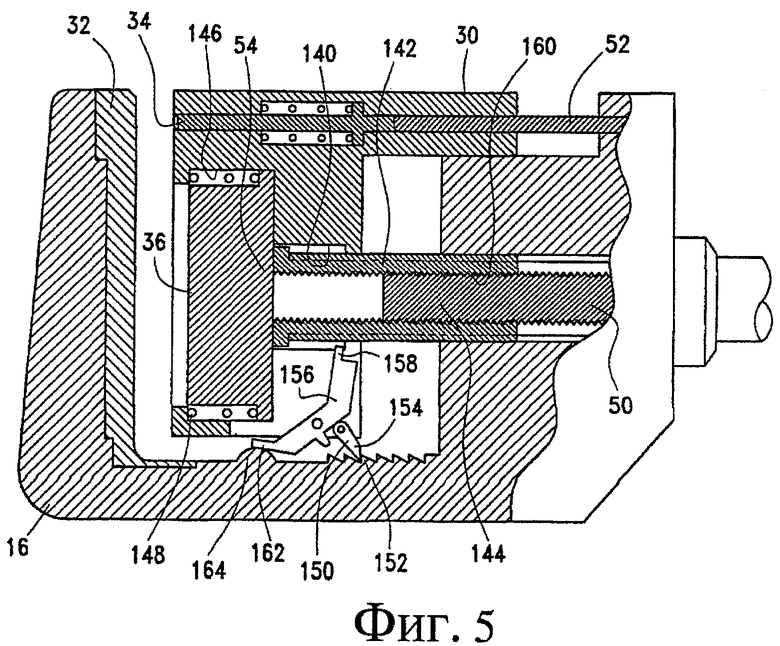
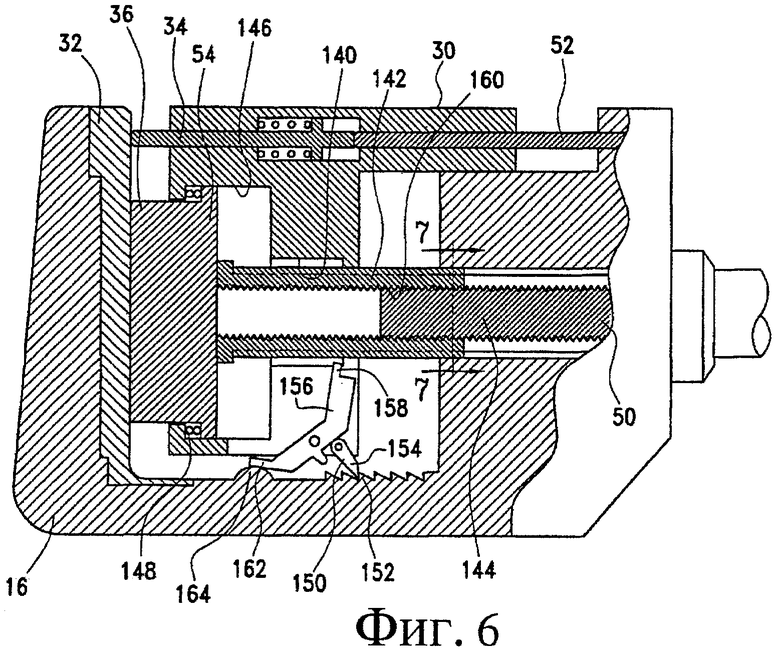
Работа корпуса 30 кассеты при движении скобок и ножа 36 более конкретно проиллюстрирована на фиг.4, 5, 6 и 7. В одном предпочтительном варианте корпус 30 кассеты имеет полость 140, форма и размеры которой позволяют принимать нажимную муфту 142, внутри которой зацепляется резьбовой дистальный конец 144 приводного тросика 50 для его перемещения, как будет более детально описано ниже. Как будет подробно описано далее, нажимная муфта 142 удерживается в полости 140 с возможностью регулируемого перемещения относительно нее.
Когда приводной тросик 50 поворачивается в заданном направлении, корпус 30 кассеты и нажимная муфта 142 перемещаются вперед к упору 32. Скобки и нож 36 также продвигаются вперед к упору 32. Продолжение поворота приводного тросика 50 побуждает корпус 30 кассеты перемещаться еще ближе к упору 32. После того как корпус 30 кассеты приблизится к упору 32 достаточно близко, нажимная муфта 142 выходит из зацепления с корпусом 30 кассеты, что позволяет нажимной муфте 142 и толкателю 54 продолжать движение вперед, прижимая нож 36 и скобки к упору 32.
Более конкретно, толкатель 54 установлен внутри полости 146, выполненной в корпусе 30 кассеты. Толкатель 54 смещается пружиной 148 в направлении от упора 32 к нажимной муфте 142. При этом когда нажимная муфта 142 освобождается и получает возможность свободного перемещения относительно корпуса 30 кассеты, толкатель 54 продвигается к упору 32 против смещения пружиной 148 до тех пор, пока скобки и нож 36 не пройдут через ткань к упору 32, где скобки изгибаются, закрепляясь в ткани.
Специалистам будет понятна важность того, чтобы корпус 30 кассеты не имел возможности случайного обратного движения. Для этого предусмотрен противовозвратный механизм. Этот противовозвратный механизм содержит противовозвратную собачку 150, форма и размеры которой обеспечивают зацепление с зубцами 152, сформированными вдоль рабочего органа 16, чтобы препятствовать движению корпуса 30 кассеты в обратном направлении. В частности, противовозвратная собачка 150 представляет собой продолговатый элемент 154, шарнирно соединенный с корпусом 30 кассеты и смещаемый для поворота к стенке рабочего органа 16. Противовозвратная собачка 150 смещается пружиной (не показана) к стенке рабочего органа 16 таким образом, что она входит в зацепление с зубцами 152, сформированным в ней, и это препятствует ее возврату.
Как было кратко описано выше, движение толкателя 54 обеспечивается за счет наличия нажимной муфты 142 в полости 140 корпуса 30 кассеты. Нажимная муфта 142, маневрируя вместе с приводным тросиком 50 и приводной собачкой 156, позволяет продвигать толкатель 54 против сопротивления пружины 148, сдвигающей толкатель 54 в закрытое положение. Более конкретно, приводная собачка 156 шарнирно установлена на корпусе 30 кассеты с возможностью перемещения между блокирующим положением (см. фиг.4) и положением разблокировки (см. фиг.5 и 6). В блокирующем положении первый конец 158 приводной собачки 156 входит в зацепление с нажимной муфтой 142, находящейся в полости 140 корпуса 30 кассеты. При зацеплении с нажимной муфтой 142 приводная собачка 156 препятствует движению нажимной муфты 142 относительно корпуса 30 кассеты. Нажимная муфта 142 содержит внутреннюю резьбу 160, по которой ходит дистальный конец 144 приводного тросика 50. При этом когда приводная собачка 156 надежно удерживает нажимную муфту 142 на месте, весь корпус 30 кассеты движется вперед при повороте приводного тросика 50.
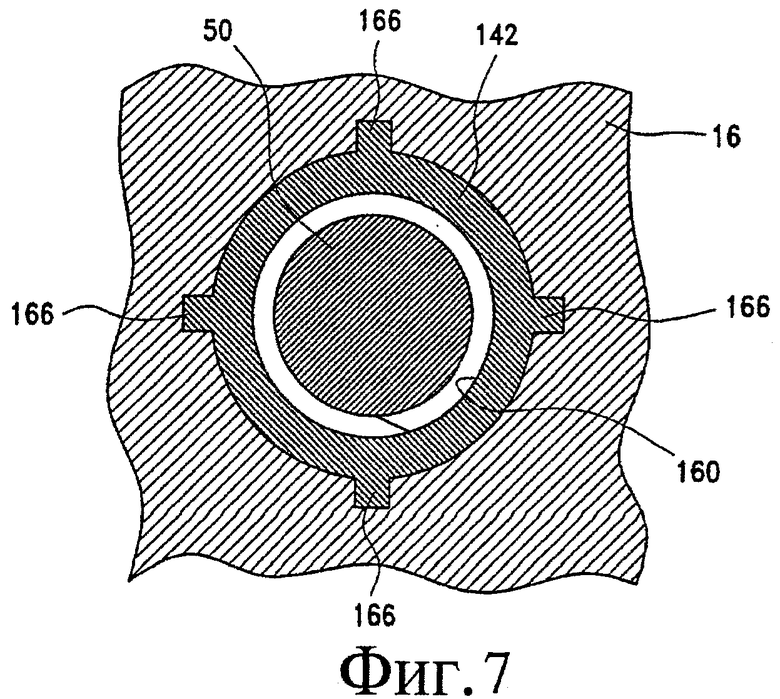
Когда корпус 30 кассеты достигает заданной точки относительно упора 32, второй конец 162 приводной собачки 156 входит в зацепление с уклоном 164 вдоль рабочего органа 16, который поворачивает его против часовой стрелки, перемещая первый конец 158 приводной собачки 156 из зацепленного блокирующего положения с нажимной муфтой 132. При этом нажимная муфта 142 получает возможность перемещаться дистально относительно корпуса 30 кассеты при повороте приводного тросика 50. Повороту нажимной муфты 142 относительно приводного тросика 50 препятствуют шлицы 166, простирающиеся от нажимной муфты в корпус 30 кассеты. При повороте приводного тросика 50, когда приводная собачка 156 выходит из зацепления с нажимной муфтой 142, нажимная муфта 142 отталкивается к упору 32, толкая тем самым толкатель 54 против сопротивления пружины 148 к упору 32, в результате чего скобки и нож вынуждены проходить через ткань.
В предпочтительном варианте настоящего изобретения для использования в конструкции приводного тросика идеально подходят многожильные нити и жгуты. Такие конструкции обеспечивают более высокую прочность и гибкость, чем одножильная нить. Для таких конструктивно сложных изделий часто используются сложные конструкции или процессы, позволяющие повысить усталостную долговечность, прочность, гибкость, крутящий момент, жесткость и гладкость поверхности. Приводной тросик может иметь форму от ультратонких или миниатюрных многожильных нитей диаметром менее приблизительно 0,003 дюйма до жгутов диаметром приблизительно 1,125 дюйма.
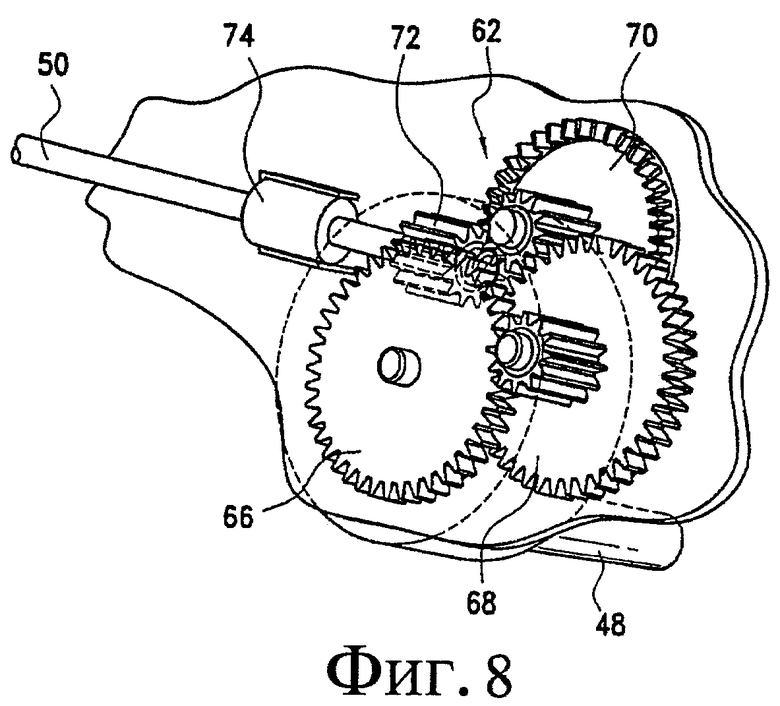
Более конкретно, как показано на фиг.8, 9 и 10, угловая рукоятка 48, используемая для поворота приводного тросика 50, присоединена к трансмиссии 62. Трансмиссия 62 включает в себя входное прямозубое цилиндрическое зубчатое колесо 66, связанное с угловой рукояткой 48, повышающее прямозубое цилиндрическое зубчатое колесо 68, связанное с входным прямозубым цилиндрическим зубчатым колесом 66, и плоское зубчатое колесо 70, которое связано с повышающим прямозубым цилиндрическим зубчатым колесом 68. Плоское зубчатое колесо 70 зацепляется с малым зубчатым колесом 72, присоединенным к приводному тросику 50 для его поворота.
В варианте настоящего изобретения, предпочтительном в настоящее время, к приводному тросику 50 присоединен запасающий энергию маховик 74. Альтернативно, маховик 74 и приводной тросик 50 могут быть выполнены в виде цельной литой детали. Маховик 7 4 выравнивает работу угловой рукоятки 48, так как в противном случае потребовалось бы прикладывать возрастающее усилие при ее повороте, поскольку в начале поворота приводной тросик 48 вызывает продвижение пускового механизма вперед. Специалистам будет понятно, что для эффективного накопления энергии маховик 74 должен иметь относительно большую вращательную массу. Когда маховик 74 приводится во вращение поворотом угловой рукоятки 48, прикладывается определенное количество энергии, которое увеличивает кинетическую энергию маховика 74. Некоторая часть этой энергии теряется в течение времени на трение. Однако часть энергии, использованной на вращение маховика 74, запасается в виде кинетической энергии. В дальнейшем эту энергию можно будет извлечь на прямое механическое перемещение. В данном изобретении, когда угловая рукоятка 48 поворачивается впервые, приводной тросик 50 не оказывает большого сопротивления, и большая часть энергии, приложенная к угловой рукоятке 48, используется для вращения маховика 74. К концу поворота угловой рукоятки нарастает торсионное сопротивление приводного тросика 50, потому что он находится вблизи конца цикла. В этот момент кинетическая энергия маховика 74 высвобождается и облегчает осуществление остальной части цикла угловой рукоятки. Согласно настоящему изобретению предпочтительно выбирать такой маховик 74, у которого сила, прикладываемая к угловой рукоятке 48, будет по существу одинаковой (например, не будет изменяться больше, чем на 25%) в течение всего движения угловой рукоятки 48, необходимого для выпуска одной скобки.
Как лучше видно на фиг.9 и 10, угловая рукоятка 48 снабжен фиксатором 76, который необходимо разблокировать перед поворотом угловой рукоятки 48 и который автоматически заблокирует угловую рукоятку 48 после одного поворота. Предпочтительно, угловая рукоятка 48 также снабжена храповым механизмом (не показан), который не дает ей поворачиваться в обратном направлении. Угловая рукоятка 48 предпочтительно имеет стопор (не показан), который не дает ей поворачиваться до тех пор, пока не сомкнутся бранши. Угловая рукоятка 48 может также быть снабжена счетчиком оборотов (не показан), который может быть присоединен к входному прямозубому цилиндрическому зубчатому колесу 66 и который считает количество оборотов угловой рукоятки 48 и тем самым показывает положение корпуса 30 кассеты, толкателя 54 скобок и ножа 36. Счетчик оборотов можно также использовать для того, чтобы воспрепятствовать повороту угловой рукоятки 48 после завершения пускового цикла.
В варианте, показанном на фиг.9, угловая рукоятка 48 имеет несколько разнесенных пальцевых выемок 78 и рифленую внешнюю периферию 80. Ручка 82 угловой рукоятки факультативно выполнена съемной, поэтому при желании угловую рукоятку 48 можно поворачивать как круглую ручку. Фиксатор 76 включает в себя нажимную кнопку 84, имеющую фланец 86, стопорный штифт 88 с фланцем 90 и пружину 92. Фиксатор 88 размещен в ступенчатом отверстии 94 и смещается пружиной 92 в ступенчатое отверстие 94 в угловой рукоятке 48. При нажатии на кнопку 84 стопорный штифт 88 перемещается против пружины 92 из отверстия 86, освобождая угловую рукоятку 48 для поворота.
Согласно варианту выполнения изобретения трансмиссия 62 вызывает поворот приводного тросика 50 на заданное количество оборотов при повороте угловой рукоятки 48 на один оборот. Шаг резьбы 98 на дистальном конце 60 приводного тросика обеспечивает перемещение корпуса 30 кассеты, толкателя 54 для скобок и ножа 36 вперед на заданное расстояние при повороте угловой рукоятки 48 на один оборот. Зубчатые колеса и шаг резьбы подбираются под определенную длину скобки. В предпочтительном в настоящее время варианте изобретения, чтобы приспособиться к скобкам различной длины, достаточно только заменить плоское зубчатое колесо (увеличив или уменьшив количество зубьев).
Предложенный хирургический степлер 10 также имеет механизм 102 активизации стопорного штифта. Однако учитывая то, что в изобретении требуется гибкость вдоль артикуляционного сочленения, активизация стопорного штифта 34 достигается за счет применения гибкого приводного тросика 52 для стопорного штифта. Гибкий приводной тросик 52 для стопорного штифта имеет проксимальный конец 104 и дистальный конец 106. Гибкий приводной тросик 52 стопорного штифта активизирует движение стопорного штифта 34. В частности, приводной тросик 52 для стопорного штифта проходит от рукоятки 12 линейного хирургического степлера 10 до стопорного штифта 34, расположенного на рабочем органе 16 линейного хирургического степлера 10. На проксимальном конце 104 приводного тросика 52 для стопорного штифта предусмотрен приводимый в действие пользователем элемент 108. Например, в предпочтительном варианте приводимым в действие пользователем элементом является угловая рукоятка 108, которую может избирательно поворачивать пользователь, чтобы передать крутящий момент вдоль длины приводного тросика 52 для стопорного штифта.
Что касается дистального конца 106 приводного тросика 52 для стопорного штифта, он соединен посредством резьбы с стопорным штифтом 34, что позволяет перемещать стопорный штифт 34 при управляющем повороте приводного тросика 52 для стопорного штифта. При этом при повороте приводного тросика 52 для стопорного штифта стопорный штифт 34 перемещается к упору 32 регулируемым образом, что позволяет ему проходить через рабочий орган 16. Движение приводного тросика 52 для стопорного штифта идентично движению приводного тросика 50, описанному выше.
Как показано на фиг.11, 12, 13 и 14, несущий конструктивный элемент 28 рабочего органа 16 присоединен к несущему стержню 20 через шаровой шарнир 110, расположенный на дистальном конце 112 несущего стержня 20, как будет более подробно описано ниже. Шаровой шарнир 110 состоит из шарика 114, заключенного для движения внутри вогнутой выемки 116 на дистальном конце 112 несущего стержня 20, и шарик 114 жестко закреплен на конце рабочего органа для движения вместе с ним.
В предпочтительном варианте настоящего изобретения несущий конструктивный элемент 28 выполнен как единое целое. Более конкретно, несущий конструктивный элемент 28 сформирован посредством экструзии, например алюминия, с последующей механической обработкой для получения несущего элемента 28, описанного в настоящем изобретении. В таком несущем конструктивном элементе 28 не требуется большого числа деталей, что существенно снижает стоимость изготовления и сборки. Кроме того, авторы полагают, что единый несущий конструктивный элемент 28 повышает общую устойчивость предложенного линейного хирургического степлера 10. Также единый прессованный несущий конструктивный элемент 28 позволяет уменьшить массу, облегчить стерилизацию, поскольку облучение кобальтом эффективно проникает в прессованный алюминий, а также снизить травматизм тканей благодаря гладкой внешней поверхности, получаемой при экструзии.
Более конкретно, рабочий орган 16 прикреплен к несущему стержню 20 так, что рабочий орган может избирательно перемещаться относительно него вокруг нескольких осей. Как будет более подробно описано ниже, рабочий орган 16 избирательно закрепляется на несущем стержне 20 таким образом, что его можно снимать и снова собирать, когда хирургический степлер 10 находится в теле пациента.
В частности, как было кратко описано выше, шаровой шарнир 110 соединяет рабочий орган 16 с несущим стержнем 20. Шаровой шарнир 110 удерживается на дистальном конце 112 несущего стержня 20 вогнутой выемкой или гнездом 116, форма и размеры которого позволяют удерживать шарик 114 на дистальном конце 112 несущего стержня 20 с возможностью вращения относительно него. Таким образом, шарик 114 перемещается относительно гнезда 116, образованного в дистальном конце 112 несущего стержня 20, обеспечивая тем самым регулируемое движение рабочего органа 16, на котором он закреплен.
В предпочтительном варианте изобретения, показанном на фиг.13 и 14, шаровой шарнир 110 имеет блокировочный механизм 118, позволяющий хирургу избирательно блокировать рабочий орган 16 в заданной ориентации и избирательно разблокировать рабочий орган 16 для регулируемого движения в случае необходимости. В частности, из рукоятки 12 к шаровому шарниру 110 проходит трубка 120 блокировки/деблокировки шарика. Трубка 120 блокировки/деблокировки шарика расположена с возможностью осевого движения вдоль длины несущего стержня 20. При этом она может перемещаться из заблокированного положения, в котором она находится в зацеплении с шаровым шарниром 110, и разблокированным положением, в котором она расположена проксимально в стороне от шарового шарнира 110.
Пружина 122 присоединена к трубке 120 блокировки/деблокировки шарика для смешения ее в блокированное положение. Когда необходимо переместить трубку 120 блокировки/деблокировки шарика, активизируется расцепляющий рычаг 124, прикрепленный к трубке 120 блокировки/деблокировки шарика, и оттягивает ее от шарового шарнира 110. При отведении трубки 120 блокировки/деблокировки шарика шаровой шарнир 110 может вращаться для обеспечения требуемой артикуляции рабочего органа 16.
Блокировка шарового шарнира 110 дополнительно усиливается за счет того, что шарик 114 имеет фасонную внешнюю поверхность, форма и размер которой позволяет "блокироваться" с дистальным концом 126 трубки 120 блокировки/деблокировки шарика. Фасонная поверхность шарика 114 способствует фрикционному сцеплению между шариком 114 и дистальным концом 126 трубки 120 блокировки/деблокировки шарика.
При этом трубка 120 блокировки/деблокировки и шарик 114 позволяют осуществлять относительную ориентацию рабочего органа 16. Однако в предпочтительном варианте настоящего изобретения эту артикуляцию необходимо задавать заранее до использования аппарата. При этом подразумевается, что можно корректировать ориентацию рабочего органа 16 в полости тела путем разблокировки трубки 120 и приложения соответствующего усилия к рабочему органу 16 для корректировки его положения. После этого трубку 120 перемещают обратно в зацепление с шариком 114, чтобы заблокировать рабочий орган 16 в заданном положении.
В альтернативном варианте, изображенном на фиг.15 и 16, артикуляция рабочего органа 216 регулируется несколькими шарнирными сочленениями. Поворот рабочего органа 216 вокруг оси, по существу совпадающей с продольной осью линейного хирургического степлера 210, достигается путем соединения рабочего органа 216 с несущим стержнем 220 и поворота несущего стержня 220 относительно рукоятки 212. Несущий стержень 220 имеет дистальный конец 222, жестко прикрепленный к рабочему органу 216, так что рабочий орган 216 будет перемещаться вместе с несущим стержнем 220. Проксимальный конец 224 несущего стержня 220 прикреплен к рукоятке 212 для поворота относительно нее.
Регулируемому движению несущего стержня 220 относительно рукояти 212 способствует удаленный артикуляционный элемент 226, который действует на несущий стержень 220, вынуждая его поворачиваться вокруг продольной оси линейного хирургического степлера 210, и в конечном итоге поворачивать рабочий орган 216 вокруг той же оси.
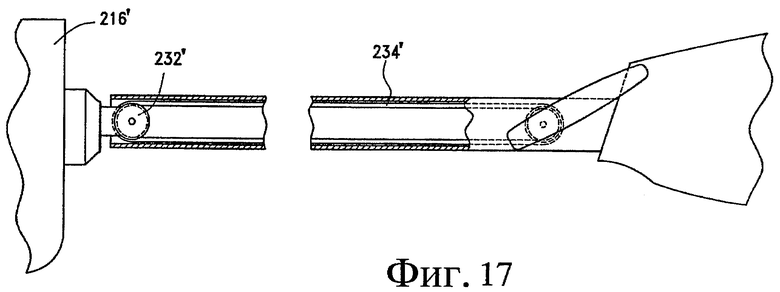
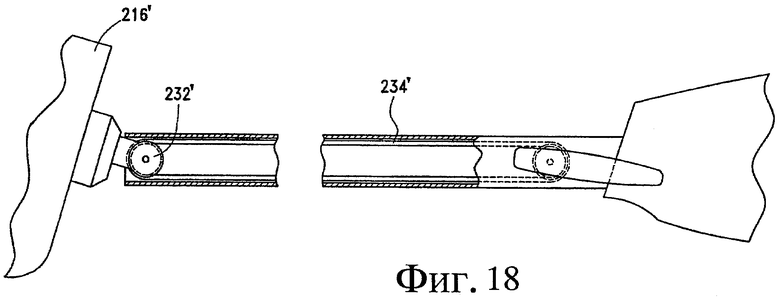
Что касается поворота рабочего органа 216 вокруг оси, перпендикулярной продольной оси линейного хирургического степлера 210, то он регулируется зубчато-ременным вращательным механизмом 228. В частности, рукоятка 212 снабжена артикуляционной ручкой 230, соединенной с зубчатым колесом 232, которое, в свою очередь, соединено с первым и вторым управляющим стержнем 234а, 234b. Аналогично, рабочий орган 216 имеет неподвижное зубчатое колесо 236, связанное с другим концом управляющих стержней 234а, 234b через поворотное зубчатое колесо 238 на дистальном конце 222 несущего стержня 220. Неподвижное зубчатое колесо 236 рабочего органа 216 жестко прикреплено к рабочему органу 216, но может поворачиваться, когда рабочий орган 216 поворачивается, при повороте поворотного зубчатого колеса 238. На практике при повороте ручки 230 аналогично поворачивается зубчатое колесо 232 рукоятки 212, вызывая перемещение управляющих стержней 234а, 234b и поворот поворотного зубчатого колеса 238, которое, в свою очередь, поворачивает неподвижное зубчатое колесо 236 рабочего органа и тем самым поворачивает рабочий орган 216. Такое вращение можно использовать для поворота рабочего органа 216 как по часовой стрелке, так и против часовой стрелки, обеспечивая широкий диапазон ориентации.
Аналогичным образом, как показано на фиг.17 и 18, управляющие стержни можно заменить тросиком 234', который приводит в действие зубчатую передачу 232', присоединенную к рабочему органу 216'.
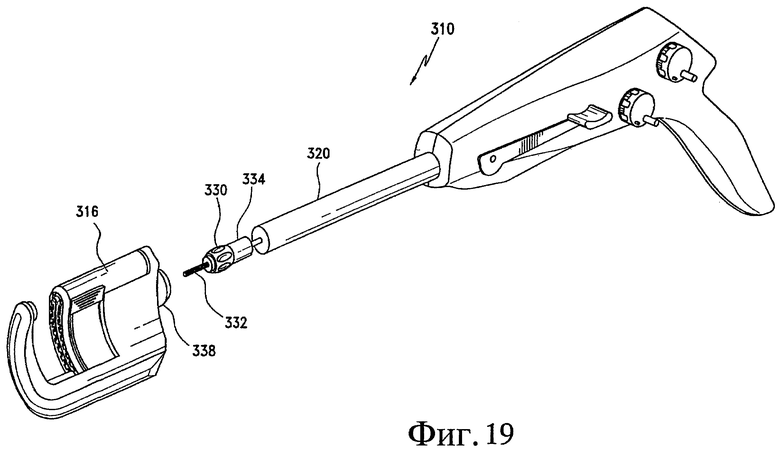
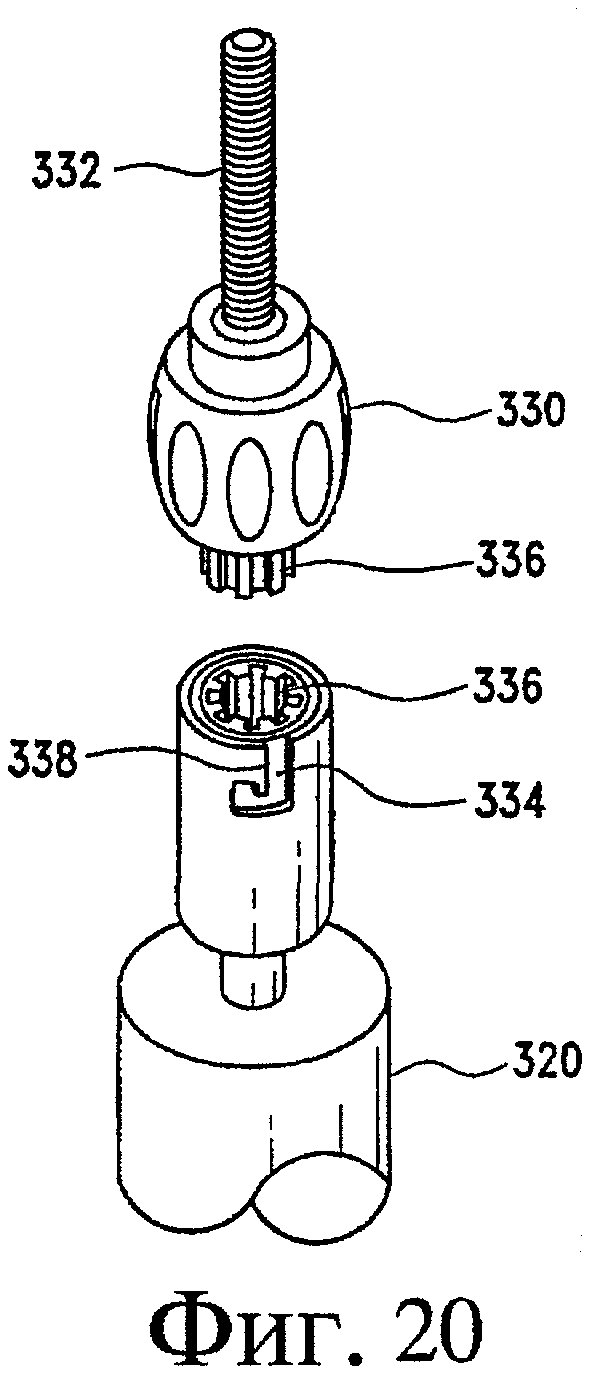
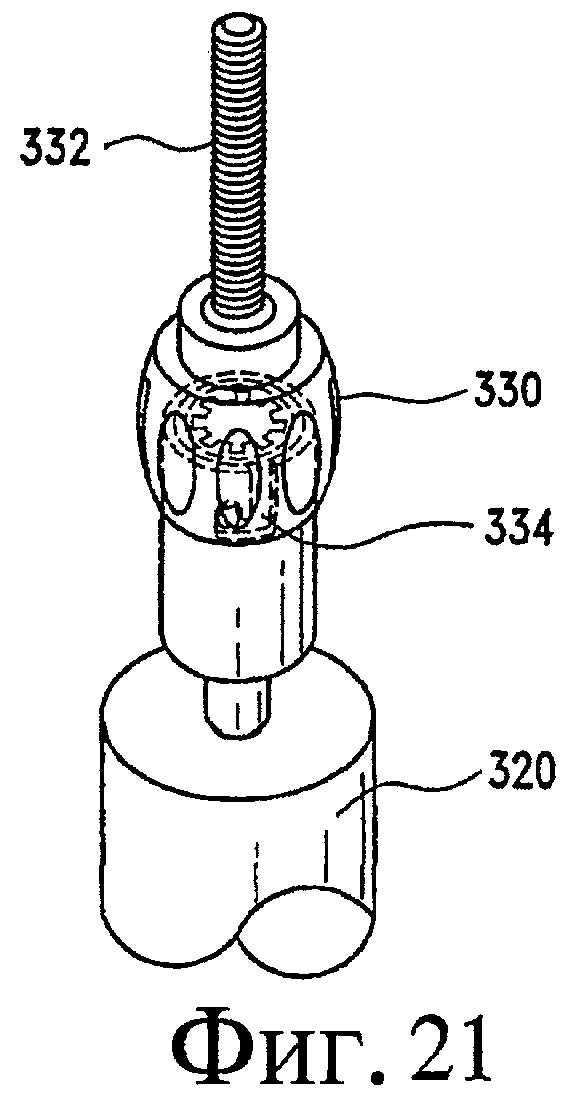
Как показано на фиг.19, 20 и 21, с учетом любого из артикуляционных механизмов, описанных выше, рабочий орган 316 разъемно крепится к несущему стержню 320, чтобы повысить универсальность применения предложенного линейного
хирургического степлера 310. В данном предпочтительном варианте несущий стержень 320 снабжен байонетным замком 334, форма и размеры которого обеспечивают зацепление со съемной блокировочной головкой 330, прикрепленной к проксимальному концу 338 рабочего органа 316 через винтовой вал 332. Специалистам будет понятно, что для зацепления с байонетным замком 334 нужно только поставить стопорную гайку 330 над байонетным замком 334 и повернуть ее для зацепления в байонетном гнезде 338. Чтобы обеспечить правильное позиционирование элементов в байонетном замке 334 и блокировочной головке 330, предусмотрены сопряженные шлицы 336. Специалистам будет понятно, что описанное выше соединение обеспечивается в центральном канале, чтобы обеспечить прохождение управляющих тросиков и других механизмов, необходимых для приведения в действие рабочего органа.
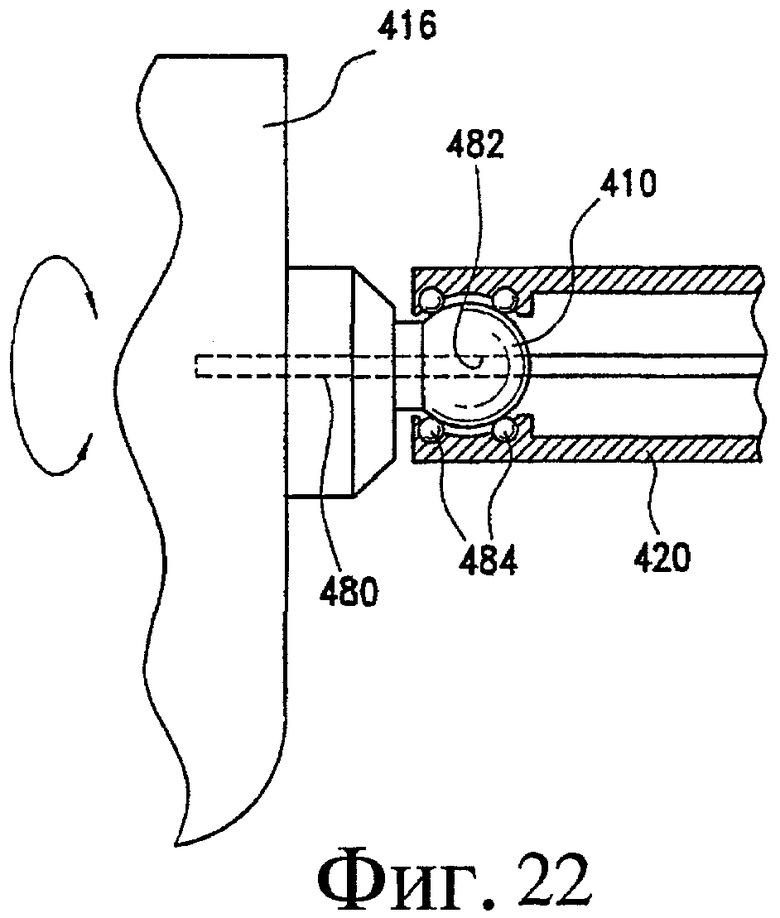
В качестве альтернативы описанным выше вариантам, как показано на фиг.22, шаровой шарнир, описанный со ссылками на фиг.11, 12, 13 и 14, можно соединить с вращательным стержнем 480, проходящим через канал 482, образованный в шаровом шарнире 410, в рабочий орган 416. При жестком закреплении вращательного стержня 480 внутри рабочего органа 416 поворот вращательного стержня 480 вызывает поворот рабочего органа 416 вокруг продольной оси несущего стержня 420. Такому повороту способствует наличие подшипников 484 между шаровым шарниром 410 и несущим стержнем 420, благодаря которым шаровой шарнир 410 может аналогично вращаться при активизации вращательного стержня 480.
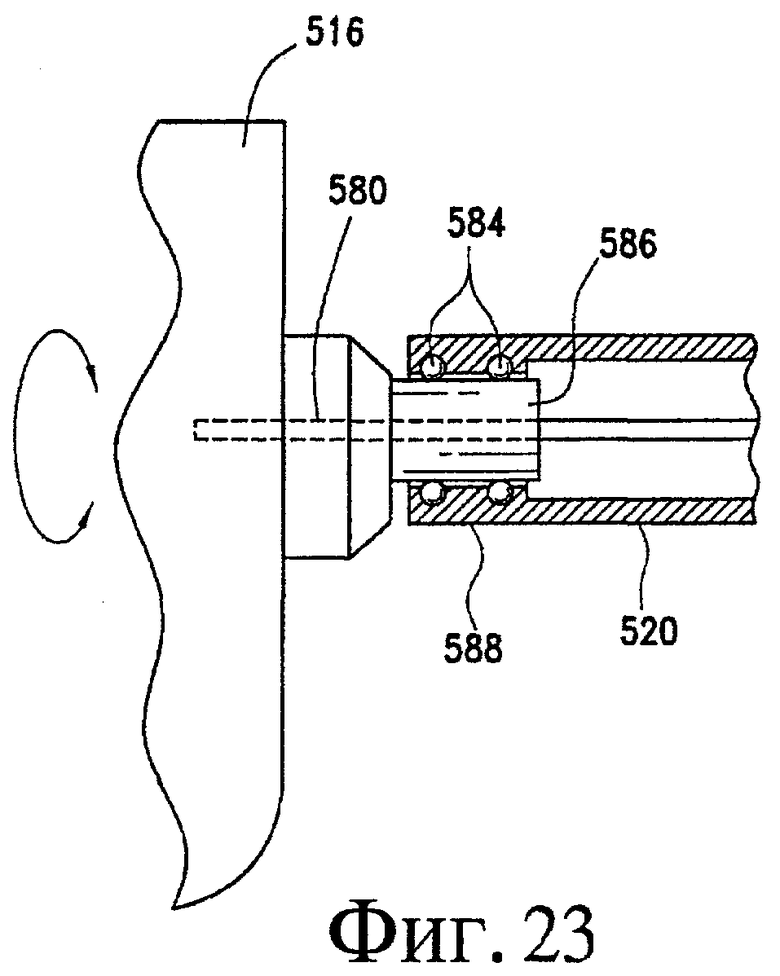
В следующем варианте, изображенном на фиг.23, описанный выше вариант можно упростить, удалив шаровой шарнир 510, если необходимо обеспечить только вращательную регулировку рабочего органа 516 вокруг продольной оси несущего стержня 520. Движению рабочего органа 516 относительно несущего стержня 520 способствует наличие подшипников 584 между стержнем 586 проксимального конца рабочего органа 516 и дистальным концом 588 несущего стержня 520, причем стержень 586 проксимального конца рабочего органа 516 имеет форму и размеры, позволяющие ему входить внутрь несущего стержня 520.
Несмотря на то, чтобы выше были описаны и проиллюстрированы предпочтительные варианты осуществления изобретения, понятно, что данное описание не ограничивает объем изобретения, под который подпадают все модификации и альтернативные конструктивные решения, соответствующие идеи и объему изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АРТИКУЛЯЦИОННЫЙ ИЗОГНУТЫЙ РЕЖУЩЕ-СШИВАЮЩИЙ АППАРАТ | 2007 |
|
RU2461363C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С БЛОКИРУЕМОЙ СИСТЕМОЙ ВЫСТРЕЛИВАНИЯ | 2009 |
|
RU2492820C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ПЛАСТИКОВОЙ СМЫКАЮЩЕЙ ПЛАНКОЙ | 2006 |
|
RU2430692C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С АЛЮМИНИЕВОЙ ГОЛОВКОЙ | 2006 |
|
RU2432915C2 |
| ПОВОРОТНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ЭЛЕКТРОПИТАНИЕМ С МНОЖЕСТВЕННЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2014 |
|
RU2663713C2 |
Изобретение относится к медицине. Ротационный изогнутый режуще-сшивающий аппарат содержит рукоятку на проксимальном конце и рабочий орган на дистальном конце для осуществления избирательного поворота. Несущий стержень соединяет рукоятку с рабочим органом и имеет продольную ось. Рабочий орган присоединен к несущему стержню для поворота вокруг продольной оси аппарата. В результате улучшается доступ к ткани, требующей лечения, и облегчается использование линейного хирургического аппарата. 2 з.п. ф-лы, 23 ил.
1. Ротационный хирургический степлер, имеющий проксимальный конец и дистальный конец, содержащий
рукоятку на проксимальном конце и рабочий орган на дистальном конце для осуществления избирательного поворота для улучшения доступа к ткани, требующей лечения, и облегчения использования шарнирного хирургического степлера,
несущий стержень, соединяющий рукоятку с рабочим органом, причем несущий стержень имеет продольную ось, при этом рабочий орган является скрепляющим хирургическим узлом, содержащим несущий конструктивный элемент и модуль кассеты, и приводной тросик проходит от рукоятки до рабочего органа для приведения в действие модуля кассеты при повороте приводного тросика,
рабочий орган присоединен к несущему стержню для поворота вокруг продольной оси степлера, и
артикуляционный механизм, расположенный между несущим стержнем и рабочим органом, для обеспечения избирательного движения рабочего органа относительно несущего стержня, причем артикуляционный механизм содержит шаровой шарнир, соединяющий рабочий орган с несущим стержнем, и блокировочный механизм, связанный с шаровым шарниром, для обеспечения избирательной блокировки рабочего органа в заданной ориентации и избирательной разблокировки рабочего органа для осуществления регулируемого перемещения в случае необходимости, при этом вращательный стержень проходит через канал, образованный в шаровом шарнире, и жестко прикреплен к рабочему органу для регулируемого поворота рабочего органа при повороте вращательного стержня, и блокировочный механизм содержит трубку блокировки/деблокировки шарика, расположенную с возможностью осевого движения относительно несущего стержня для избирательного перемещения между заблокированным положением, в котором трубка блокировки/деблокировки шарика находится в зацеплении с шаровым шарниром, и разблокированным положением, в котором трубка блокировки/деблокировки шарика расположена в стороне от шарового шарнира.
2. Хирургический степлер по п.1, в котором шаровой шарнир содержит шарик с фасонной внешней поверхностью, размеры и форма которого обеспечивают сцепление с дистальным концом трубки блокировки/деблокировки шарика.
3. Хирургический степлер по п.1, в котором шаровой шарнир содержит шарик с фасонной внешней поверхностью, форма и размеры которого обеспечивают блокировку с дистальным концом трубки блокировки/деблокировки шарика.
| US 4566620 А, 28.01.1986 | |||
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |
| US 5662258 А, 02.09.1997 | |||
| УПРАВЛЯЕМЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2000 |
|
RU2181566C2 |
| ПОЛОГОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2144791C1 |
| US 4641657 А, 10.02.1987. | |||

