Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано при создании устройств электронной техники, обладающих высокой надежностью действия в качестве блока, отвечающего за их безопасное функционирование, например, при создании аппаратуры систем автоматического оповещения работающих на путях.
В связи с широким применением микропроцессорной техники в устройствах железнодорожной автоматики и телемеханики, обеспечивающих безопасность движения поездов и безопасность работающих на путях, требуется обеспечить их надежное функционирование с заданными параметрами функциональной безопасности.
Известны различные способы реализации данного требования. Одним из способов является организация питания устройств формирования ответственных сигналов от отдельного автономного «безопасного» источника, формируемого отдельными схемами, которые управляются от двух независимых каналов управления. В качестве формирователей питания, названного «напряжением безопасности», используются каскады безопасности на основе инверторов полярности, которые формируют напряжение определенной полярности, а именно формируют на выходе напряжение, инверсное по отношению к входному напряжению.
В качестве аналогов использованы технические решения, приведенные в патентах России №№2345923, 2253585 и 2253586 (B61L 23/16). Во всех патентах дано описание организации электропитания каскадов безопасности.
Устройства содержат каналы управления, каскады безопасности, вспомогательный источник. Напряжение безопасности получается в результате преобразования напряжения последовательно соединенными каскадами безопасности.
Прототипом устройства является патент Российской Федерации №2345923, в котором с целью повышения надежности устройства каждый из каскадов безопасности содержит дополнительно цепи контроля состояния ключей каскада безопасности, сигналы с которых поступают в каналы обработки, где производится их анализ и делается вывод о работоспособности устройства.
К недостаткам этих устройств можно отнести недостаточную защищенность «напряжения безопасности» на выходе устройства от различного рода повреждений элементов схем, формирующих это напряжение, а также незначительную мощность «напряжения безопасности» на выходе устройства, что затрудняет управление цепями подключения устройств оповещения.
Техническим результатом предлагаемых изменений является повышение безопасности формирования ответственных сигналов, снижение вероятности выдачи ответственных сигналов при различных неисправностях элементов, их формирующих, что уменьшает вероятность выдачи речевых сообщений работающим на путях, не соответствующих поездной обстановке на месте производства работ, и, следовательно, повышает безопасность работающих на путях. В ЭТТ на системы оповещения опасным отказом является формирование контрольного сигнала или формирование неразборчивого сигнала при наличии поезда на участке приближения к месту работ (в зоне производства работ).
Технический результат достигается тем, что в предлагаемом устройстве сигнал исправности вырабатывается генератором первого комплекта контроллера опроса на низкой частоте, например от 30 до 75 Гц, а в качестве выходного устройства используется электромагнитное реле с опорным напряжением определенной полярности, причем выход каждого каскада снабжен фильтром, контролируемым по цепям контроля состояния ключей, а алгоритм исправной работы каскадов безопасности с целью повышения надежности работы устройства построен по асинхронному принципу, причем с целью исключения случайного срабатывания цепь возбуждения реле ВС проходит через оптореле при наличии напряжения на нем от модуля вывода контроллера состояния матрицы при наличии управляющего сигнала от первого комплекта блока обработки.
При повреждениях в схеме и подаче напряжения с полярностью, отличной от требуемой, реле не притянет якорь и выключит подачу сигналов оповещения. Системой оповещения пользоваться нельзя.
Конструктивно устройство формирования напряжения питания определенной полярности с безопасным полярным элементом коммутации ответственных цепей входит в состав контроллера опроса и блока обработки аппаратно-программного комплекса АПК-СОП. К каждому блоку подключено реле РРМ, реагирующее на одну полярность подводимого напряжения. При неисправностях в схеме, в результате которых на реле будет подано напряжение другой полярности, оно не возбудится. Система оповещения работать не будет.
Устройство работает следующим образом.
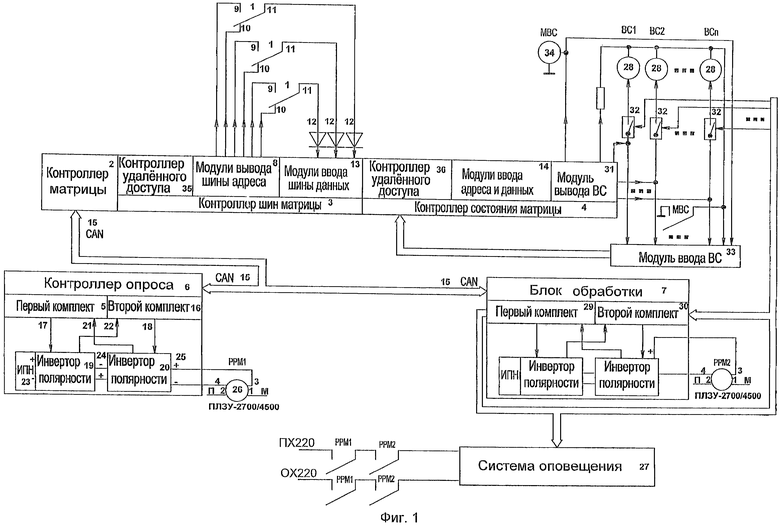
Структурная схема аппаратно-программного комплекса приведена на фиг.1.
Со свободных тройников контактов реле (1) ЭЦ сбор информации производится контроллером матрицы (2), представляющим собой двухкомплектный контроллер, состоящий из контроллера шин матрицы (3) и контроллера состояния матрицы(4), выполненных в виде контроллеров удаленного сбора данных для дискретных и аналоговых сигналов с интерфейсом CANopen, управление которыми осуществляет первый комплект контроллера опроса (5), а считывает эту информацию как контроллер опроса (6), так и блок обработки (7).
Контроллер матрицы (2) состоит из контроллера шин матрицы (первый комплект) (3) и контроллера состояния матрицы (второй комплект (4), которые обмениваются информацией с контроллером опроса (6) по протоколу Robert Bosch CAN Specification 2.OA в соответствии с международным стандартом ISO 11898.
Контроллер шин матрицы (3) состоит из контроллера удаленного доступа (35) модулей вывода шины адреса (8), модулей ввода шины данных (13) и модуля ввода ВС (33). Контроллер состояния матрицы (4) состоит из контроллера удаленного доступа (36), модулей ввода адреса и данных (14) и модуля вывода ВС (31).
Общее число шин, выходящих из модулей вывода шины адреса (8) контроллера шин матрицы (3) к контактам ЭЦ, составляет от 2 до 32, причем половина их соединена с фронтовыми контактами (9), а вторая половина - с тыловыми контактами (10), к каждой шине подключено по 8 фронтовых или по 8 тыловых контактов реле (1). Число контактов реле (тройников) не превышает 128. 8 общих (осевых) контактов (11) реле через диоды развязки (12) соединены с соответствующим входом модуля ввода шины данных(13) контроллера шин матрицы (3) и образуют шину данных. Всего 8 шин (разрядов) данных.
Контроллер состояния матрицы (второй комплект) (4) содержит контроллер удаленного доступа (36), до пяти модулей ввода адреса и данных (14), подключенных параллельно к модулям вывода шины адреса (8) и модулям ввода шины данных (13), и модуль вывода ВС (31). Модули ввода адреса и данных (14) подключены к концам обвязок шин для контроля их целостности.
Сеть CANopen (15) обеспечивает первому комплекту контроллера опроса (5) передачу данных в контроллер матрицы (2) для управления состоянием дискретных модулей и установки параметров настройки сети CANopen (15), в которую входят контроллер матрицы (2), контроллер опроса (6) и блок обработки (7).
Первый комплект контроллера опроса (5) по CAN шине (15) осуществляет задание режимов работы модулей контроллера матрицы (2) и циклическое изменение состояния модулей вывода шины адреса (8) с частотой 30-75 Гц.
При включении питания контроллер матрицы (2) автоматически определяет состав подключенных дискретных модулей и их состояние. Эта информация передается посредством сети CANopen (15) в первый комплект контроллера опроса (5) и используется им для задания режимов работы модулей контроллера матрицы (2).
После чего первый комплект контроллера опроса (5) переходит к генерации циклического изменения состояния модулей вывода шины адреса (8). С каждым таким изменением первый комплект контроллера опроса (5) производит опрос состояния модулей ввода (13, 14) контроллера матрицы (2). Это состояние модулей ввода (13, 14) считывается вторым комплектом контроллера опроса (16) и блоком обработки (7). После считывания данных о состоянии модулей контроллера матрицы (2) обоими комплектами контроллера опроса (6), первый (5) и второй (16) комплекты контроллера опроса (6) обмениваются полученной информацией для проверки ее идентичности. Первый комплект контроллера опроса (5) проверяет состояние контактов реле ЭЦ (1), а второй комплект контроллера опроса (16) отслеживает его проверку.
Это достигается путем установки соответствующих выводов модулей вывода шины адреса (8) и последующего считывания соответствующего этому значению модулей вывода шины адреса (8) состояния модуля ввода шины данных (13) с подключенными к нему через разделительные диоды (12) общими (осевыми) (11) контактами реле, сгруппированными в виде матрицы. После этого первый (5) и второй (16) комплекты контроллера опроса (6) асинхронно и независимо друг от друга сравнивают полученные данные на достоверность и при их совпадении формируют динамический сигнал исправности (17) и (18) на инверторы полярности (19) и (20).
Динамический сигнал исправности ДСИ (17) и (18) является тактовым сигналом для инверторов полярности (19) и (20) и формируется при достоверном сравнении для каждого изменения состояния модулей вывода шины адреса (8), генерируемого первым комплектом контроллера опроса (5). Исправность инверторов полярности (19) и (20) контролируется оптронами, которые через формирователи (21) и (22) подключены к противоположному комплекту контроллера опроса.
Формирователь напряжения безопасности представляет собой два включенных последовательно инвертора полярности (19) и (20), выполненных на оптронах и на биполярных транзисторах, а также конденсаторах и диодах Шотки.
При включении источника питания ИПН (23) на инвертор полярности (19) поступает напряжение питания. В результате динамический сигнал исправности (17) приводит к появлению напряжения обратной полярности (24) на выходе инвертора полярности (19). Это напряжение (24) поступает на вход инвертора полярности (20), преобразуется с помощью динамического сигнала исправности (18) в напряжение безопасности (25) обратной полярности. Напряжение безопасности (25) подается на обмотку 3, 4 реле РРМ1 (26). Реле РРМ1 (26) притянет якорь лишь в том случае, если полярность и величина поданного напряжения соответствует требуемой, так как на обмотку 1, 2 реле РРМ1 (26) подано опорное напряжение установленной полярности.
Исправность (тестирование) инверторов полярности (19) и (20) определяется при каждом переключении динамических сигналов исправности (17) и (18) по динамическим сигналам синхронизации (21) и (22) для первого (5) и для второго (16) комплектов контроллера опроса.
Для приема и обработки «безопасной» информации от контроллера опроса (6) служит блок обработки (7), в котором контроль функционирования производится независимо двумя комплектами со сравнением результатов контроля посредством CAN протокола (15). В контроллере опроса (6) информация о состоянии контактов реле (1) обрабатывается на предмет ее достоверности. В блоке обработки (7) в соответствии с заданным алгоритмом работы систем оповещения и поездной обстановкой выдаются соответствующие команды на синтезаторы оповещения системы оповещения (27), а также вырабатывается время задержки на открытие сигналов при производстве работ на стрелках, ограждаемых данными сигналами. В релейных системах для задержки открытия сигналов при определенных ситуациях устанавливаются реле ВС (28), контакты которых включены в цепи открытия сигналов. Работой реле ВС (28) управляет блок обработки (7). Первый комплект блока обработки (29) подает питание на синтезаторы в подключенной системе оповещения (27). Второй комплект блока обработки (30) считывает сигналы, подаваемые на синтезаторы системы оповещения (27), а также сигналы, контролирующие работу системы оповещения или определяющие задание режимов ее работы. Работа инверторов полярности блока обработки аналогична работе инверторов полярности контроллера опроса.
Для обеспечения безопасного функционирования блока обработки (7) производится периодическое, не менее одного раза в секунду, тестирование вывода питающего синтезатор оповещения напряжения путем кратковременного снятия с него напряжения питания первым комплектом (29) и считывания с него в это время нулевого сигнала вторым комплектом (30). Результатами теста оба комплекта обмениваются с использованием сетевого интерфейса CAN (15).
Для исключения случайного срабатывания вспомогательных реле ВС (28) цепь возбуждения реле ВС (28) проходит через оптореле (32) при наличии напряжения на нем от модуля вывода ВС (31) контроллера состояния матрицы (4) и при наличии управляющего сигнала от первого комплекта (29) блока обработки (7).
Включение оптореле (32) осуществляется непосредственно от первого комплекта (29) блока обработки (7), а включение реле МВС (34) осуществляется только при достоверном формировании сигнала модулем вывода ВС (31) контроллера состояния матрицы (4) и исправной работе оптореле (32) блока обработки (7). Возбуждение вспомогательных реле ВС (28) осуществляется строго по одному, проверяется выключенное состояние оптореле (32) и реле МВС. Тестируется модуль вывода ВС (31) на правильность подачи напряжения для возбуждения выбранного реле ВС (28). Включается требуемое оптореле (32) и контролируется отсутствие срабатывания остальных оптореле (32). После чего возбуждается реле МВС (34). Получение сигнала о срабатывании выбранного реле ВС (28) либо превышение времени 0,25 с сбрасывает в исходное состояние модуль вывода ВС (31), оптореле (32) и реле МВС (34).
Указанный технический результат подтвержден расчетом, при котором интенсивность опасных отказов не превышает 3,68×0-14 1/ч.
Таким образом, применение устройства формирования напряжения питания определенной полярности с безопасным полярным элементом коммутации ответственных цепей при создании аппаратуры систем автоматического оповещения работающих на путях на базе микропроцессорной техники в устройствах железнодорожной автоматики и телемеханики позволит обеспечить их надежное функционирование с заданными параметрами функциональной безопасности и обеспечить безопасность движения поездов и безопасность работающих на путях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2286279C2 |
| Автоматическое предупредительно-оповестительное устройство переездной железнодорожной сигнализации | 2018 |
|
RU2681792C1 |
| БЕСКОНТАКТНЫЙ КОДОВЫЙ ПУТЕВОЙ ТРАНСМИТТЕР | 2013 |
|
RU2526726C1 |
| РЕЛЕЙНЫЙ ОБЪЕКТНЫЙ КОНТРОЛЛЕР ДЛЯ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ, СПОСОБ БЕЗОПАСНОГО ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ РЕЛЕ, СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ РЕЛЕ, СПОСОБ ТЕСТИРОВАНИЯ ОБМОТКИ РЕЛЕ | 2018 |
|
RU2679754C1 |
| Двухканальная система для регулирования движения железнодорожных транспортных средств | 2020 |
|
RU2726243C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ НАПРЯЖЕНИЯ ПИТАНИЯ ДЛЯ ВЫХОДНЫХ КАСКАДОВ ОТВЕТСТВЕННЫХ СИГНАЛОВ | 2007 |
|
RU2345923C2 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| УСТРОЙСТВО ДЛЯ ПОДГОТОВКИ К ПУСКУ РАКЕТЫ | 2022 |
|
RU2801840C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано при создании аппаратуры систем автоматического оповещения работающих на путях. Устройство формирования напряжения содержит каналы управления, каскады безопасности, каждый из которых управляется сигналами исправности и дополнительно содержит цепи контроля состояния ключей каскада безопасности, сигналы с которых поступают в каналы обработки, где они анализируются. В качестве выходного устройства используется электромагнитное реле с опорным напряжением определенной полярности. С целью исключения случайного срабатывания цепь возбуждения реле ВС проходит через оптореле при наличии напряжения на нем от модуля вывода контроллера состояния матрицы при наличии управляющего сигнала от первого комплекта блока обработки. Выход второго инвертора полярности подключен к рабочей обмотке электромагнитного реле постоянного тока, а поляризующая обмотка подключена к местному источнику питания. При повреждениях в схеме и подаче напряжения с полярностью, отличной от требуемой, реле не притянет якорь и выключит подачу сигналов оповещения. Технический результат заключается в повышении безопасности движения поездов. 2 з.п. ф-лы, 1 ил.
1. Устройство формирования напряжения питания определенной полярности с безопасным полярным элементом коммутации ответственных цепей, содержащее каналы управления, каскады безопасности, каждый из которых управляется сигналами исправности и дополнительно содержит цепи контроля состояния ключей каскада безопасности, сигналы с которых поступают в каналы обработки, где они анализируются, и делается вывод о работоспособности устройства,
отличающееся тем, что, с целью повышения безопасности и упрощения устройства, сигнал исправности вырабатывается генератором первого комплекта контроллера опроса на низкой частоте, например от 30 до 75 Гц, а в качестве выходного устройства используется электромагнитное реле с опорным напряжением определенной полярности, причем выход каждого каскада снабжен фильтром, контролируемым по цепям контроля состояния ключей.
2. Устройство по п.1, отличающееся тем, что алгоритм исправной работы каскадов безопасности с целью повышения надежности работы устройства построен по асинхронному принципу.
3. Устройство по п.1, отличающееся тем, что, с целью исключения случайного срабатывания, цепь возбуждения реле ВС проходит через оптореле при наличии напряжения на нем от модуля вывода контроллера состояния матрицы при наличии управляющего сигнала от первого комплекта блока обработки.
| УСТРОЙСТВО ФОРМИРОВАНИЯ НАПРЯЖЕНИЯ ПИТАНИЯ ДЛЯ ВЫХОДНЫХ КАСКАДОВ ОТВЕТСТВЕННЫХ СИГНАЛОВ | 2007 |
|
RU2345923C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ СИГНАЛА ПУТЕВОГО ПРИЕМНИКА АВТОБЛОКИРОВКИ | 1993 |
|
RU2083409C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| DE 19513244 A1, 10.10.1996. | |||

