Изобретение относится к области железнодорожной автоматики и используется на автоматизированных и механизированных сортировочных станциях, оборудованных системой электрической централизацией парка прибытия, как в составе комплексной системы управления процессом надвига и роспуска составов, так и в качестве автономного устройства.
Известно устройство для передачи информации при маневровой работе на железнодорожной станции, содержащее радиокомплексы машинистов локомотивов, составителей поездов и дежурных по станции. Радиокомплекс машиниста содержит приемопередатчик, связанный с блоками контроля занятости канала связи. Радиокомплекс составителя поездов снабжен электронными коммутаторами, связанными с входами управления приемопередатчика. Радиокомплекс дежурного по станции снабжен блоком управления режимом работы приемопередатчика. Передача экстренных сообщений разрешена вне очереди. Приемопередатчики других абонентов локальной радиосети на это время принудительно переводятся в режим приема, чем обеспечивается дополнительная защита от взаимных помех (RU 2179518 С2, 20.02.2002).
Также известна централизованная диспетчерская система, содержащая распределенные контролируемые пункты и центральный пункт управления с рабочим местом поездного диспетчера, объединенные внешней локальной сетью. Резервированный центральный блок управления каждого распределенного контролируемого пункта управления состоит из основного комплекта, резервного комплекта и модуля диагностики, которые связаны между собой. Каждый из упомянутых комплектов состоит из модуля управления и модуля связи. Модуль управления содержит компьютер, запоминающие устройства, устройства индикации, устройство сброса, устройство отображения, буфер ввода-вывода, устройство ввода, устройство согласования с локальной сетью, датчик температуры, счетчик времени, устройство преобразования интерфейса, устройство управления упомянутым комплектом и преобразователь напряжения (RU 2240245 С1, 07.02.2003).
Известна измерительная система, включающая инерционное навигационное устройство в дополнение к системе определения месторасположения и/или системам измерения скорости, осуществляющая сбор данных о месторасположении через GPS или Vsb-радиолокатор, или датчик пульса колеса и сбор скоростных показателей для обеспечения контроля и управления локомотивом. Система содержит устройство, позволяющее ручной ввод данных положения локомотива, процессор, обрабатывающий информацию о положении поезда и его скоростных данных от индивидуальных бортовых систем для оценки, обнаружения и устранения ошибок, неисправностей (ЕР 0736441 А1, 09.10.1996).
Известно горочное программно-задающее устройство, относящееся к системам автоматического регулирования скорости роспуска отцепов на сортировочных горках. Устройство содержит блок печати, скоростемеры надвига, формирователь параметров маршрутов и отцепов, блок вычисления скорости роспуска, блок кодирования и индикации соединены последовательно. Первый выход блока кодирования и индикации является выходом в устройства горочной автоматической централизации (ГАЦ). Устройство снабжено блоком моделирования сортировочного процесса, блоком задания осности, блоком определения текущего веса состава, блоком задания скорости роспуска, блоком дистанционного управления, блоком определения направления движения (RU 2157773 С2, 20.10.2000).
Недостатками данных решений являются недостаточная автоматизация процесса расформирования составов, внедряемого на сортировочных станциях.
Задачей, на решение которой направленно данное изобретение, является создание системы горочной автоматической локомотивной сигнализации, обеспечивающей формирование команд управления, организацию командной радиолинии пост - горочные локомотивы, осуществление локомотивной сигнализации, управление скоростью состава, управление огнями попутных выходных и маневровых сигналов, идентификацию локомотивов, регистрацию реализуемых команд управления, отображение поездной ситуации.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении качества процесса надвига и роспуска, существенном сокращении случаев нарушения технологической дисциплины, за счет проверки бдительности машиниста, и усовершенствовании автоматизации контроля соблюдения установленной регламентируемой технологии процесса, за счет обеспечения функционирования радиоканала в циклическом режиме, обработки сигналов о состоянии напольных устройств, контроля позиции маневровых локомотивов и формирование маршрутных заданий, передачи информации абонентам, подключенным к системе, ведении технологических протоколов работы.
Указанный технический результат достигается тем, что в системе горочной автоматической локомотивной сигнализации ГАЛС Р, состоящей из подсистемы постовой аппаратуры (ПА ГАЛС Р), включающей управляющий вычислительный комплекс (УВК), по меньшей мере, один контроллер сбора данных (КСБ), по меньшей мере, два автоматизированных рабочих места (АРМ), одно из которых отображает текущее состояние напольных устройств, текущие состояния подвижных объектов на станции, а другое контролирует работоспособность постовой аппаратуры системы, и состоящей из подсистемы бортовой аппаратуры (БА ГАЛС Р), включающей контроллер бортовой (БК), блок управления (БУ), блок индикации (БИ) с локомотивным светофором (СЛ), блок переключателей (БП), предназначенный для подачи питания на бортовую аппаратуру и ее подключения к электрооборудованию локомотива, два датчика импульсов (ДИ), приемопередатчик (радиомодем) и антенну приемопередатчика, управляющий вычислительный комплекс состоит из, по меньшей мере, двух контроллеров постовых (ПК), по меньшей мере, двух комплектов распределенной матрицы опроса контактов реле (РМО), по меньшей мере, двух приемопередатчиков (радиомодемов) с блоком питания, по меньшей мере, двух антенн приемопередатчика,
контроллер сбора данных (КСБ) состоит из распределенной матрицы опроса контактов реле и контроллера постового, включающего модем,
при этом информационный обмен бортовой аппаратуры с оборудованием постовой аппаратуры осуществляется по радиоканалу.
Управляющий вычислительный комплекс включает панель для оптомодулей 24-позиционная 70 GRCQ24-HL, оптомодули вывода OUT 70G-ODC5, оптомодули ввода IN 70G-IDC-5B, переходной модуль цифрового ввода/вывода ADAM 3968/50, преобразователи интерфейса RS485/RS232 Transio A52, терминальные платы IP-Term, постовые контроллеры типа Compact PCL, блоки питания матрицы NLP-100 напряжения 24 В, источники бесперебойного питания Smart-UPS 700 напряжения 220 В, модемный пул, модемы М-160.
Постовой контроллер управляющего вычислительного комплекса выполнен в едином корпусе и включает в себя два комплекта устройств: крейт Compact PCI, центральную процессорную плату СР-603, плату ввода-вывода CPCI-200A с платой заднего ввода-вывода BIO-4, плату ввода-вывода СР-6210 с платой заднего ввода-вывода ТМ-680, жесткий диск 20 Гб, zip-дисковод, блок питания.
Постовой контроллер, входящий в состав контроллера сбора данных, включает панель для оптомодулей 24-позиционная 70 GRCQ24 - HL, оптомодули вывода OUT 70G-ODC5, оптомодули ввода IN 70G-IDC-5B, переходной модуль цифрового ввода/вывода ADAM 3968/50, постовой контроллер Advantech, блок питания матрицы NLP-40 напряжения 24 В, модем М160А, источник бесперебойного питания АРС Smart 720 напряжения 220 В.
Контроллер постовой контроллера сбора данных типа Advantech выполнен в едином корпусе и включает в себя центральную процессорную плату PCN-6351, плату интерфейса RS422/485 PCI-1601A, плату интерфейса RS232 PCL-858+, плату цифрового ввода-вывода PCI-1753.
Матрица опроса контактов реле состоит из отдельных диодных плат матрицы, каждая из которых содержит 12 диодов.
Автоматизированное рабочее место представляет собой персональный компьютер.
В состав системы ГАЛС Р входят две подсистемы: ПА ГАЛС Р - постовая аппаратура ГАЛС Р и БА ГАЛС Р - бортовая аппаратура ГАЛС Р.
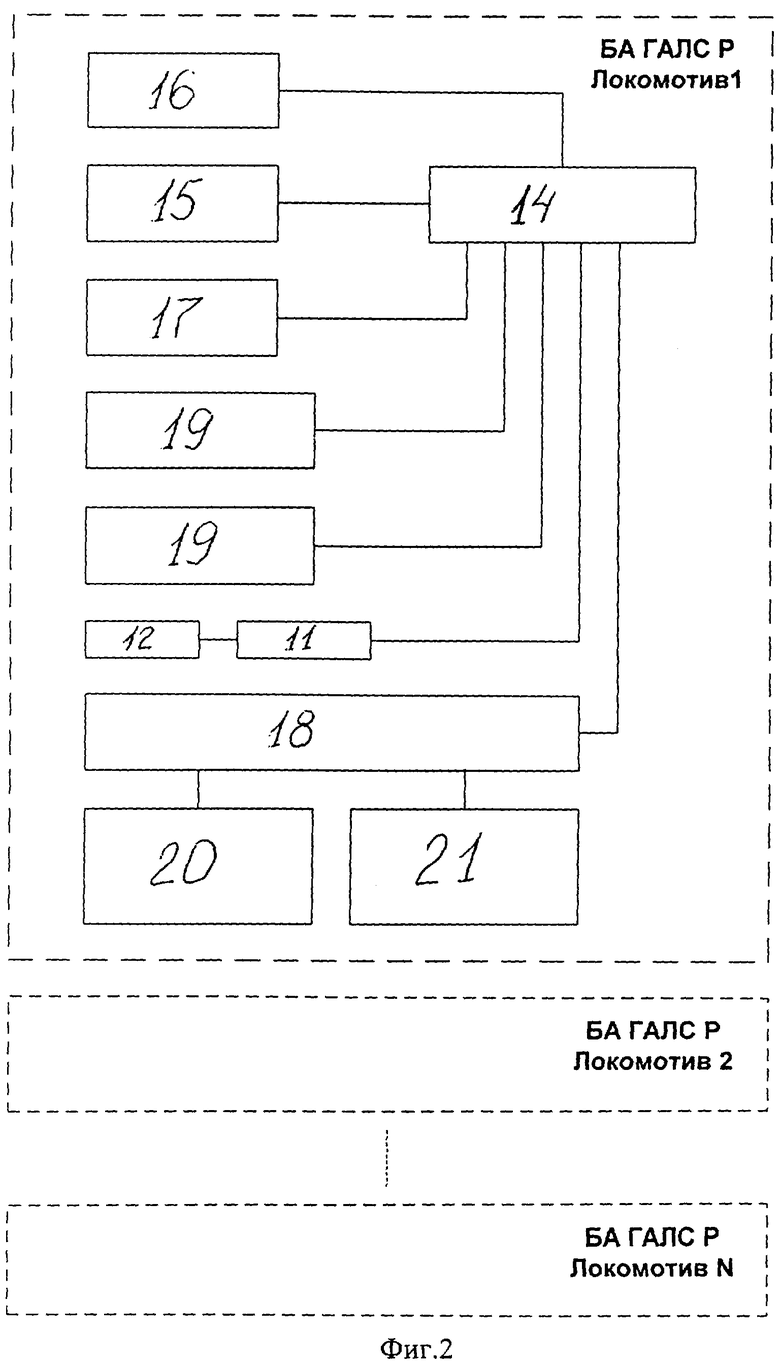
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема постовой аппаратуры системы (ПА ГАЛС Р); на фиг.2 - структурная схема бортовой аппаратуры системы (БА ГАЛС Р).
Система горочной автоматической локомотивной сигнализации ГАЛС Р состоит из постовой аппаратуры (ПА ГАЛС Р), включающей подсистемы постовой аппаратуры центрального поста 1, подсистемы постовой аппаратуры первого периферийного поста 2 и подсистемы постовой аппаратуры второго периферийного поста 3 (фиг.1), и бортовой аппаратуры ГАЛС Р (БА ГАЛС Р).
ПА ГАЛС Р центрального поста 1 состоит из управляющего вычислительного комплекса 4 (УВК), включающего электрическую централизацию 6 (ЭЦ), две распределенные матрицы опроса 7 (РМО), два контроллера постовых 8 (ПК), модемы 10, радиомодемы 11 и антенны 12, и автоматизированных рабочих мест электромеханика 9 (АРМ ШНС), контролирующих работоспособность постовой аппаратуры системы, и автоматизированных рабочих мест дежурного по станции 13 (АРМ ДСП), отображающих текущее состояние напольных устройств, текущее состояние подвижных объектов на станции.
Подсистемы постовой аппаратуры первого периферийного поста 2 и подсистемы постовой аппаратуры второго периферийного поста 3 состоят из электрической централизации 6 (ЭЦ), автоматизированных рабочих мест дежурного по станции 13 (АРМ ДСП) и контроллера сбора данных 5 (КСБ), включающего распределенную матрицу опроса 7 (РМО), контроллер постовой 8 и модем 10.
В состав БА ГАЛС Р входят (фиг.2) контроллер бортовой 14 (БК), блок управления 15 (БУ), блок индикации 16 (БИ) с локомотивным светофором 17 (СЛ), блок переключателей 18 (БП), датчики импульсов 19 (ДИ), антенна 12, радиомодем 11, силовая установка локомотива 20 и устройство автостопа 21.
Управляющий вычислительный комплекс УВК ГАЛС Р обрабатывает сигналы о состоянии напольных устройств, поступающих с КСБ, обеспечивает функционирование радиоканала в циклическом режиме, контролирует позиции маневровых локомотивов и формирует маршрутные задания, передает информацию абонентам, подключенным к УВК, ведет технологические протоколы работы системы.
Контроллер сбора данных КСБ ГАЛС Р осуществляет сбор информации о состоянии напольных объектов путем циклического опроса матрицы чтения состояния контактов реле, сбор информации о состоянии счетчиков осей, сбор информации, поступающей от систем микропроцессорной централизации (МПЦ) или релейно-процессорной централизации (РПЦ), передачу обработанной информации в УВК ГАЛС Р и другим абонентам.
АРМ ДСП отображает текущее состояние напольных устройств, отображает текущее состояние подвижных объектов на станции, предоставляет возможность ввода информации для дежурного по станции. АРМ ШНС контролирует работоспособность постовой аппаратуры системы и распределенной матрицы контактов реле электрической централизации (ЭЦ), осуществляет просмотр электронных протоколов.
В состав УВК ГАЛС Р входит шкаф Proline, два контроллера постовых ПК ГАЛС Р, два комплекта распределенной матрицы опроса контактов реле РМО, два приемопередатчика (радиомодема) с блоком питания DL, две антенны приемопередатчика AN с кабелем, два источника бесперебойного питания «Smart-UPS 700» ИБП, два монитора, две клавиатуры.
В целях обеспечения безопасности перевозочного процесса аппаратура центрального поста резервируется. В связи с этим, устанавливается два комплекта приемопередающей аппаратуры, а также дублируется оборудование, монтируемое внутри шкафа УВК и матрица РМО.
В шкафу УВК размещают следующее оборудование:
- панель для оптомодулей 24-позиционная 70 GRCQ24-HL;
- оптомодули вывода OUT 70G-ODC5;
- оптомодули ввода IN 70G-IDC-5B;
- переходной модуль цифрового ввода/вывода ADAM 3968/50;
- преобразователи интерфейса RS485/RS232 Transio A52;
- терминальные платы IP-Term;
- постовые контроллеры типа CompactPCI;
- блоки питания матрицы NLP-100 (напряжение 24 В);
- источники бесперебойного питания Smart-UPS 700 (напряжение 220 В);
- модемный пул (корзина);
- модемы М-160.
Контроллер центрального поста выполнен в едином корпусе и включает в себя два комплекта устройств:
- крейт (корпус) CompactPCI;
- центральная процессорная плата СР-603;
- плата ввода-вывода CPCI-200A с платой заднего ввода-вывода BIO-4;
- плата ввода-вывода СР-6210 с платой заднего ввода-вывода ТМ-680;
- жесткий диск 20 Гб;
- zip-дисковод;
- блок питания.
УВК системы располагается на центральном посту в помещении УВК КСАУ СП.
В состав ПА ГАЛС Р периферийных постов входит шкаф Conceptline, контроллер постовой ПК ГАЛС Р, распределенная матрица опроса контактов реле РМО, АРМ ДСП (АРМ, отображающее текущее состояние напольных устройств, текущее состояние подвижных объектов на станции), АРМ ШНС (АРМ, контролирующее работоспособность постовой аппаратуры системы) в составе: монитор и клавиатура, источник бесперебойного питания «Smart-UPS 1000» ИБП.
В шкафу ПК располагают следующее оборудование:
- панель для оптомодулей 24-позиционная 70 GRCQ24 - HL;
- оптомодули вывода OUT 70G-ODC5;
- оптомодули ввода IN 70G-IDC-5B;
- переходной модуль цифрового ввода/вывода ADAM 3968/50;
- постовой контроллер Advantech;
- блок питания матрицы NLP-40 (напряжение 24 В);
- модем М160А;
- источник бесперебойного питания АРС Smart 720 (напряжение 220 В).
Контроллер периферийных постов типа Advantech выполнен в едином корпусе и включает в себя центральную процессорную плату PCN-6351, плату интерфейса RS422/485 PCI-1601A, плату интерфейса RS232 PCL-858+, плату цифрового ввода-вывода PCI-1753.
В состав периферийного поста ПА ГАЛС Р входят модемный пул, источник бесперебойного питания, крейт Compact PCI с процессорным модулем - постовой контроллер, распределенная матрица контактов реле ЭЦ и модули сопряжения с УСО (устройством счета осей), монитор, клавиатура, манипулятор «мышь». В зависимости от плана станции КСБ может располагаться на нескольких постах.
В состав АРМ ДСП входят монитор, клавиатура, источник бесперебойного питания, системный блок. АРМ ДСП располагается в помещении дежурного по станции.
В состав АРМ ШНС входят монитор, системный блок, клавиатура, источник бесперебойного питания. Связь АРМ ШНС с УВК ГАЛС Р осуществляется по последовательному каналу RS-232. АРМ ШНС располагается в комнате старшего электромеханика СЦБ.
Постовая аппаратура центрального поста (ПА ГАЛС Р ЦП) размещена в специальном помещении управляющего вычислительного комплекса (УВК). На периферийных постах ПА ГАЛС Р размещена в релейном помещении.
АРМ ДСП установлены в помещении дежурного по станции. Оборудование радиоканала расположено в комнате связи (радиомодемы) и на крыше поста (антенны). Приемопередатчик крепится на стене рядом с вводом кабеля антенны. Приемопередатчик должен пломбироваться.
Аппаратура АРМов ДСП (АРМ ДСП А, АРМ ДСП Б, АРМ ДСП В - фиг.1) размещена на рабочих местах дежурных по станции. АРМ ДСП предназначен для отображения и регистрации технологических операций на станции, ручного задания координаты маневровым локомотивам, просмотра технологического журнала. Для каждого рабочего места ДСП, программа настраивается на отображение района станции, соответствующего зоне контроля и управления конкретного ДСП.
Рядом с постовым контроллером центрального поста установлены АРМ ШНС, использующиеся для выдачи информации электромеханикам об отказах устройств системы и аппаратуры ЭЦ в зоне действия ГАЛС Р, профилактики работы постового контроллера, а также, в случае необходимости, для перезагрузки контроллера.
Матрица РМО состоит из отдельных диодных плат матрицы ДПМ, каждая из которых содержит 12 диодов. Эти платы располагаются на стативах в релейной поста ЭЦ и предназначены для сбора информации о состоянии реле ЭЦ. Схемы РМО приведены в проектах оборудования станций устройствами ГАЛС Р.
Бортовая программа БА ГАЛС Р предназначена для:
- отображения маршрутного задания;
- отображения показаний горочного светофора;
- автоматического управления дизель-генераторной установкой локомотива ЧМЭ3Т (ЧМЭ3);
- проверки бдительности машиниста в процессе реализации заданной скорости надвига и роспуска составов на сортировочных горках по командам устройств ПА ГАЛС Р, передаваемых по каналу цифровой радиосвязи.
Бортовая программа позволяет повысить безопасность выполнения операций надвига и роспуска с использованием современной технологии, предусматривающей параллельный роспуск, подтягивание и попутный надвиг составов, повысить качество расформирования составов за счет более точной реализации скоростных режимов надвига и роспуска, принимать информацию о режиме движения, показаниях горочного сигнала и заданной скорости движения, количества свободных блок-участков впереди состава, состоянии первого по ходу сигнала, а также о маршруте и допустимой скорости движения по маршруту надвига с соответствующим отображением на мониторе и локомотивном светофоре изделия полученной информации, облегчить работу машиниста при управлении локомотивом в одно лицо.
Бортовая программа системы отвечает за локомотивную сигнализацию, а именно за дешифрацию и контроль достоверности команд управления, формирование сообщений о приеме команды управления или вводе/выводе локомотива из системы, отображение команд управления на локомотивном устройстве индикации, сопряжение с имеющимися на локомотиве приборами автостопа, формирование сигналов о фактической скорости движения, координате и номере локомотива, режиме управления и состоянии локомотивных устройств, а также за управление скоростью состава, включающее автоматическую реализацию скоростных заданий, поступающих по радиоканалу, управление позициями мощности регулятора дизеля, управление током возбуждения тягового генератора, управление динамическим тормозом локомотива, измерение фактической скорости движения локомотива, управление пневматическими тормозами локомотива, измерение тягового тока генератора.
В состав БА ГАЛС Р входит контроллер бортовой БК, блок управления БУ, блок индикации БИ с локомотивным светофором СЛ, блок переключателей БП, два датчика импульсов ДИ, приемопередатчик DL, антенна приемопередатчика AN и кабели (9 штук).
Блок БП предназначен для подачи питания на изделие и подключения БА ГАЛС Р к электрооборудованию локомотива и осуществляет автоматическое управление дизель-генераторной установкой локомотива, обработку информации о состоянии органов управления локомотива, обмен информацией с радиостанцией, блоком БИ и блоком БУ.
Блок БИ предназначен для передачи машинисту информации о состоянии электрооборудования локомотива, работе радиостанции, фактической скорости и направления движения локомотива, режимах работы изделия, передаваемых от постовой аппаратуры ПА ГАЛС Р, состоянии путевых сигналов, к которым приближается локомотив, и различных ситуациях, возникающих по ходу роспуска.
Блок БУ служит для ввода машинистом в блок БК информации о заданной скорости локомотива, режиме управления (ручной, местное управление, телеуправление), подтверждения выполнения маршрутов.
Радиостанция и антенна обеспечивают непрерывную связь между постовыми устройствами ГАЛС Р и бортовой аппаратурой. Датчики ДИ предназначены для преобразования угла поворота колеса в импульсы постоянного тока, с помощью которых определяется фактическая скорость и направление движения локомотива.
Блоки БК, DL размещены в верхней передней нише кабины машиниста локомотива. Блоки СЛ и БИ устанавливаются перед машинистом, а блоки БП и БУ на расстоянии вытянутой руки.
Антенна AN закреплена на крыше кабины локомотива. Датчики импульсов ДИ1, ДИ2 размещены на 2-ой и 5-ой оси локомотива со стороны помощника машиниста.
Система работает следующим образом.
Начало функционирования постовой аппаратуры системы осуществляется после включения постового контроллера и АРМов ДСП на всех постах и запуска программы.
Питание каждого комплекта постового контроллера (ПК), а также каждого АРМа ДСП (АРМ ДСП А, АРМ ДСП Б, АРМ ДСП В) на центральном посту осуществляется от своего источника бесперебойного питания (ИБП). Питание АРМ ДСП на маневровом и резервном постах осуществляется от ИБП постового контроллера.
Включение постового контроллера системы и системного блока АРМ ДСП производится переводом тумблера питания на корпусе в положение «ВКЛ».
Запуск программы происходит автоматически при включении электропитания. Перезапуск программы производится кратковременным нажатием кнопки RESET.
В штатном режиме работы ПК после запуска программы на экране монитора АРМ ШНС появляется изображение плана станции и меню оператора. Постовой контроллер центрального поста (ПК ГАЛС Р ЦП) осуществляет формирование информации о технологических операциях и поездной ситуации на станции путем циклического опроса приборов ЭЦ станции и схемы увязки с горкой при помощи распределенной матрицы опроса контактов реле. На резервном и маневровом постах ПК системы осуществляет опрос контактов реле ЭЦ данного поста, передачу их состояний на контроллер центрального поста и поддержание информационного обмена с АРМ ДСП на данном посту.
Матрица РМО, представляющая собой панели для оптомодулей с установленными оптомодулями контактов реле, осуществляет сбор сигналов с этих контактов. Матрица состоит из входных и выходных сигналов, которые управляются соответственно оптомодулями IN и OUT. В штатном режиме светодиоды на всех оптомодулях светятся ровным светом, при этом индикатор состояния матрицы имеет вид - М (буква «М» белого цвета на розовом фоне).
Связь ПК ГАЛС Р ЦП с каждым АРМом ДСП центрального поста осуществляется по интерфейсу RS-422 через преобразователь Transio A52. Связь ПК ГАЛС Р МПЦ и РПЦ с АРМом ДСП осуществляется по интерфейсу RS-422 с помощью платы PCI-1601A. Фактом устойчивой связи между АРМом ДСП и ПК является наличие идентификатора данного АРМа в окне абонентов на экране АРМа ШНС. При этом индикаторы TxD и RxD мигают с частотой 1 сек.
Обмен информации между ПК ГАЛС Р ЦП и постовыми контроллерами на маневровом и резервном постах осуществляется по телефонной линии связи с помощью модемов М-160. Модем подключается к контроллеру по специальному кабелю с интерфейсом RS-232. Подключение модемов к телефонной линии выполняется связевым кабелем через разъем типа RJ45. Фактом устойчивой связи между ПК центрального и периферийных постов является наличие идентификатора данного АРМа в окне абонентов на экране АРМа ШНС, при этом индикаторы TxD и RxD на модемах мигают с частотой 1 сек.
Связь с контроллером ГАЦ МН осуществляется по сети Ethernet, при этом в окне абонентов присутствует идентификатор ГАЦ МН. Связь с контроллером АСУ организуется через системный шлюз с интерфейсом RS-232, при этом в окне абонентов присутствует идентификатор АСУ.
АРМ ДСП предназначен для контроля за выполнением маневровых маршрутов и для работы по управлению надвигом и роспуском составов на сортировочных горках, а также для просмотра журнала обработки составов. Ввод команд осуществляется с клавиатуры.
Связь АРМа ДСП с ПК ГАЛС Р осуществляется по интерфейсу RS-422 с помощью платы PCI-1601A. При наличии устойчивой связи и безошибочным информационным обменом на экране АРМа будет отображаться план станции и работа всех устройств ЭЦ в реальном времени.
Информационный обмен с маневровыми локомотивами оборудованными БА системы осуществляется ПК ГАЛС Р ЦП по радиоканалу. Состояния локомотивов, с которыми поддерживается радиосвязь, отображаются на экране АРМа в специальном окне локомотивов. Радиомодем подключается к ПК по интерфейсу RS-422 через преобразователь Transio A52. При передаче локомотивам команд и приеме от них ответных телеграмм на радиомодеме и преобразователе Transio A52 мигают индикаторы TxD - передача и RxD - прием. Частота мигания индикатора TxD - один раз в 2 сек.
Включение бортовой аппаратуры системы осуществляется при поставке тумблера питания на блоке переключателя БП в положение «ВКЛ». В блоке бортового контроллера БК происходит самотестирование всех узлов изделия. Спустя 20-30 секунд на мониторе блока индикации БИ должно появиться устойчивое изображение рабочего экрана машиниста (фиг.2). После этого тумблер «ГАЛС Р» на блоке БП переводится в положение «ВКЛ» для подключения цепей управления локомотива к блоку БК. Локомотив автоматически вводится в систему, при этом обеспечивается непрерывная связь между постовыми устройствами ГАЛС Р и бортовой аппаратурой системы. Контроль наличия связи осуществляется по миганию индикаторов на передней панели радиостанции DL и изменению скобок на мониторе блока БИ(( )).
Маневровый маршрут движения локомотива задается с поста оператора. При этом на мониторе блока БИ должна появиться информация о типе маршрута, конечном элементе маршрута (имя пути), длине маршрута, количестве свободных блок-участков до конца маршрута, конце маршрута. С помощью этой информации машинист может выполнить маршрут заезда под состав. Связь между постом и локомотивом осуществляется непрерывно по радиоканалу.
После задания оператором поста маршрута надвига для состава, под которым стоит локомотив, на мониторе блока БИ появляется информация о типе маршрута, конечном элементе маршрута, длине маршрута, количестве свободных блок-участков, допустимой скорости.
На бортовом локомотивном светофоре СЛ зажигается огонь, соответствующий горочному светофору.
Выполнение маршрута машинист может осуществлять в трех режимах работы:
- ручное управление;
- телеуправление;
- местное управление.
Ручное управление машинист осуществляет в штатном режиме согласно правилам техники безопасности при эксплуатации электроустановок потребителя и ТРА станции. При этом на мониторе блока БИ отображается значение фактической скорости, измеряемое с помощью датчиков ДИ1 и ДИ2, направление движения («↑» - вперед, «↓» - назад) и режим работы «Р» (ручной).
Телеуправление осуществляется с помощью бортовой аппаратуры системы. В этом режиме локомотив управляется автоматически (тяга и торможение) в соответствии с заданной скоростью, значение которой поступает с постовых устройств системы. Значение этой скорости меняется по мере приближения головы состава к горбу при надвиге и в зависимости от показаний горочного светофора при роспуске. Для перехода в этот режим машинист переводит рукоятку контроллера машиниста КМ в любое положение, кроме нулевого, и нажимает клавишу «Auto» на блоке управления БУ. На мониторе блока БИ под надписью режим работы появляется «А» (автоматический).
В этом режиме система управляет:
- мощностью дизеля ступенчато (позиции контроллера машиниста КМ);
- током обмотки возбуждения возбудителя (плавное управление);
- динамическим тормозом;
- электропневматическим клапаном ЭПК;
- пневматическими тормозами;
- пескоподачей.
На мониторе блока БИ отображается информация о состоянии следующих органов управления локомотива:
- реле управления;
- положения реверсивной рукоятки контроллера машиниста КМ;
- реле управления динамическим тормозом;
- рукоятки бдительности РБ;
- реле боксования.
Кроме этого на мониторе блока БИ отображается фактически скорость локомотива, направление движения, вид операции (надвиг - роспуск), расстояние до конца маршрута, количество свободных блок-участков, состояние радиосвязи с постом и текущая информация по ходу роспуска.
В местном режиме управления машинист имеет возможность сам изменять скорость локомотива с помощью бортовой аппаратуры системы. Система автоматически поддерживает скорость, заданную машинистом.
Предложенная система позволяет проверить бдительность машиниста в следующих случаях:
- скатывание локомотива;
- превышение скорости;
- неисправность данного изделия.
Если подтверждение бдительности отсутствует в течение 6 секунд, срабатывает электропневматический клапан (ЭПК) и происходит экстренное торможение.
При отказе одного из датчиков ДИ система продолжает работать по факту совпадения положения реверсивной рукоятки контроллера КМ и состояния исправного ДИ.
При «зависании» радиостанции автоматически переключается питание, восстанавливая работоспособность связи.
Питание от бортовой сети локомотива подается на составные части системы при включенном и выключенном состоянии дизеля.
В системе предусмотрены схемы защиты от импульсных помех, а также от перенапряжений в бортовой сети локомотива.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СИСТЕМА ФОРМИРОВАНИЯ МНОГОГРУППНЫХ СОСТАВОВ | 2010 |
|
RU2452643C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2429153C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ ДИСЦИПЛИНЫ ПРОЦЕССА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ (СКТД) | 2005 |
|
RU2307041C1 |
Система горочной автоматической локомотивной сигнализации с использованием радиоканала относится к области железнодорожной автоматики и состоит из подсистемы постовой аппаратуры и подсистемы бортовой аппаратуры. Подсистема постовой аппаратуры включает управляющий вычислительный комплекс, контроллер сбора данных, два автоматизированных рабочих места. Подсистема бортовой аппаратуры включает контроллер бортовой, блок управления, блок индикации с локомотивным светофором, блок переключателей, два датчика импульсов, приемопередатчик и антенну приемопередатчика. Управляющий вычислительный комплекс состоит из двух контроллеров постовых, двух комплектов распределенной матрицы опроса контактов реле, двух приемопередатчиков с блоком питания, двух антенн приемопередатчика. Контроллер сбора данных состоит из распределенной матрицы опроса контактов реле и контроллера постового, включающего модем. Информационный обмен бортовой аппаратуры с оборудованием постовой аппаратуры осуществляется по радиоканалу. Технический результат заключается в повышении качества процесса надвига и роспуска. 6 з.п. ф-лы, 2 ил.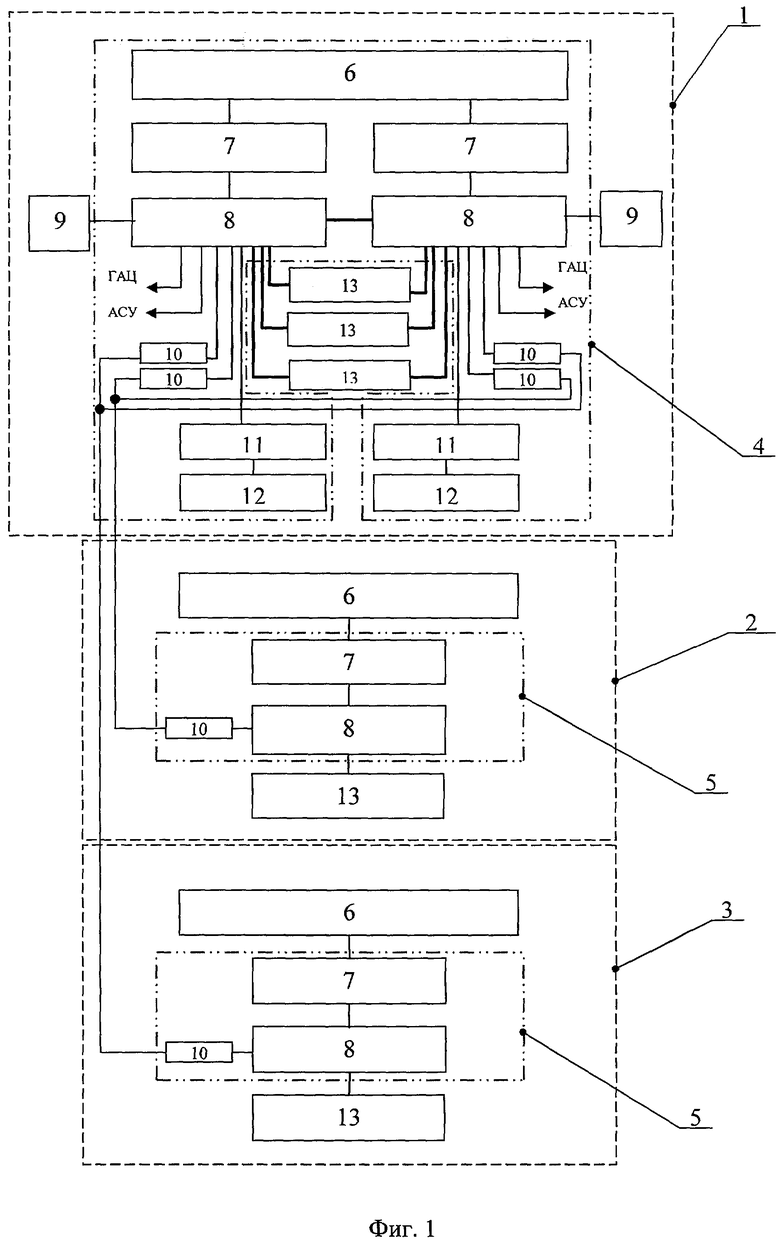
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ ПРИ МАНЕВРОВОЙ РАБОТЕ НА ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 1999 |
|
RU2179518C2 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| Устройство для автоматической локомотивной сигнализации | 1987 |
|
SU1512845A1 |
| ЕР 0736441 А1, 09.10.1996 | |||
| Способ выщелачивания руд и концентратов | 1976 |
|
SU605848A1 |

