Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и устройствам для осуществления контроля за скважинными инструментами. Более конкретно, настоящее изобретение относится к способам и устройствам для управления скважинными инструментами в зависимости от их глубины в буровой скважине.
Уровень техники
Сбор точных данных геофизических исследований является ключевым средством для эффективной разведки и добычи нефтяных ресурсов. На основе данных, собранных в буровой скважине (таких как электрические и радиоактивные свойства), а также распространения звука через подземную формацию геофизики принимают много важных оперативных решений. Например, геофизики могут использовать скважинные данные для выбора места установки обсадной трубы в скважине и варианта перфорирования скважины для возбуждения потока углеводородов.
Одним из способов сбора данных геофизических исследований скважины является кабельный каротаж. При проведении кабельного каротажа каротажный инструмент (часто также называемый зондом) опускают в ствол скважины на электрическом каротажном кабеле. Каротажным инструментом является электрический измерительный прибор, который может, например, собирать электрические данные, акустические сигналы, которые распространяются через окружающую формацию, или измерять радиоактивность. Эти измерения обычно преобразуются в цифровую форму и передаются по каротажному кабелю. Другими известными методами каротажа являются каротаж в процессе бурения (LWD) и измерение в процессе бурения (MWD). При данных видах каротажа данные собираются в процессе бурения.
Каротажные данные обычно индексированы по глубине, на которой проводились измерения. В современном оборудовании каротажные измерения могут также проводиться не на основе интервала по глубине, а на основе временного интервала. Такие каротажные измерения во временной области в конечном итоге преобразуются в данные, индексированные по глубине.
Точность данных является критическим элементом в оценке каротажных данных. Точность данных зависит как от точности измерений, так и от точности показателя глубины.
В кабельном каротаже показатель глубины обычно определяется путем измерения длины кабеля, опущенного в ствол скважины, и длины намотанного кабеля. Эти измерения проводятся на поверхности, когда кабель пропускается через комплексную систему измерения глубины с роликом (IDW). Однако в измерениях с помощью IDW существуют погрешности по отношению к реальной глубине измерительных инструментов. Например, если инструменты застревают в стволе скважины (вследствие различных скважинных условий) при проведении каротажа вверх по стволу скважины, кабель может растягиваться, так как лебедка продолжает наматывать кабель. Подобные проблемы возникают также при проведении каротажа методами LWD и MWD, например, гибкие насосно-компрессорные трубы и бурильная труба могут искривляться.
Было предложено несколько различных подходов для корректировки зарегистрированного показателя глубины. Один подход, описанный в патенте США № 5019978, выданном Howard, Jr и др., использует акселерометры для определения местоположения измерительных инструментов. Данные акселерометров используются в алгоритме для коррекции показателя глубины. Другой подход, описанный в патенте США № 6704655, выданном Kelly, использует данные тензодатчика в комбинации с данными акселерометра в алгоритме замкнутой системы пропорционально-интегрально-дифференциального регулирования для коррекции показателя глубины. Патент США № 7020557, выданный Reniska, раскрывает устройство для сбора данных кабельного каротажа и способы установления скорректированной глубины на основе данных давления, получаемых от двух датчиков давления, расположенных на известном расстоянии друг от друга.
Следовательно, существует необходимость в более точных и усовершенствованных методах для обеспечения точных измерений глубины и управления скважинным оборудованием на точной глубине во время скважинных операций.
Краткое описание изобретения
В одном аспекте некоторые варианты осуществления настоящего изобретения относятся к способам слежения за инструментом в стволе скважины. Способ в соответствии с одним вариантом осуществления настоящего изобретения включает: получение первого изображения ствола скважины, используя устройство формирования изображения, связанное с инструментом; получение второго изображения ствола скважины, используя устройство формирования изображения по истечении выбранного периода времени; согласование первого изображения со вторым изображением путем смещения одного из первого и второго изображений; определение величины смещения; и сравнение величины смещения с опорным расстоянием для определения расстояния перемещения инструмента.
Другой способ в соответствии с одним вариантом осуществления настоящего изобретения включает: получение изображения элемента ствола скважины, используя первое устройство формирования изображения, связанное с инструментом; перемещение инструмента в стволе скважины; и регистрацию расстояния перемещения инструмента, когда изображение данного элемента ствола скважины получено с помощью второго устройства формирования изображения, расположенного на расстоянии от первого устройства формирования изображения, в котором расстояние перемещения инструмента равно расстоянию между первым и вторым устройствами формирования изображения.
В другом аспекте некоторые варианты осуществления настоящего изобретения относятся к системам для слежения за инструментом, перемещающимся в стволе скважины. Система в соответствии с вариантом осуществления настоящего изобретения включает: процессор и память, в котором память хранит программу, содержащую инструкции для: получения первого изображения ствола скважины, используя устройство формирования изображения, связанное с инструментом; получения второго изображения ствола скважины, используя устройство формирования изображения по истечении выбранного периода времени; согласования первого изображения со вторым изображением путем смещения одного из первого и второго изображений; определения величины смещения; и сравнения величины смещения с опорным расстоянием для определения расстояния перемещения инструмента.
Другая система в соответствии с одним вариантом осуществления настоящего изобретения включает процессор и память, в котором память хранит программу, содержащую инструкции для: получения изображения элемента ствола скважины, используя первое устройство формирования изображения, связанное с инструментом; перемещения инструмента в стволе скважины; и регистрации расстояния перемещения инструмента, когда изображение данного элемента ствола скважины получено с помощью второго устройства формирования изображения, расположенного на расстоянии от первого устройства формирования изображения, в котором расстояния перемещения инструмента равно расстоянию между первым и вторым устройствами формирования изображения.
Другие аспекты и преимущества настоящего изобретения будут понятны из следующего описания и прилагаемой формулы изобретения.
Краткое описание чертежей
На Фиг.1 изображена принципиальная схема, иллюстрирующая выполнение каротажа в соответствии с одним вариантом осуществления настоящего изобретения.
На Фиг.2 изображена принципиальная схема компьютерной системы для сбора данных кабельного каротажа, которое может быть использовано с вариантами осуществления настоящего изобретения.
На Фиг.3 изображена схема, иллюстрирующая оптическое устройство формирования изображения, которое может быть использовано с вариантами осуществления настоящего изобретения.
На Фиг.4А и Фиг.4В изображены схемы, иллюстрирующие согласование изображений в соответствии с одним вариантом осуществления настоящего изобретения.
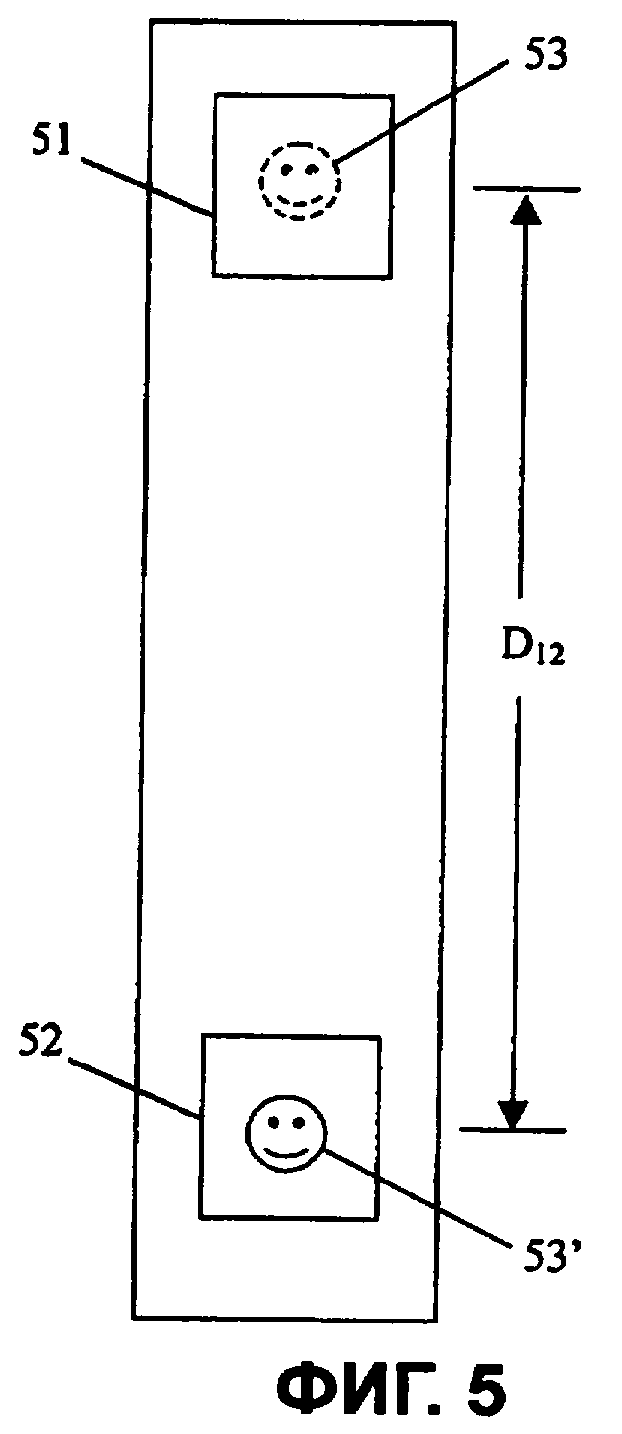
На Фиг.5 изображен инструмент, имеющий два устройства формирования изображения в соответствии с одним вариантом осуществления настоящего изобретения.
На Фиг.6 изображена блок-схема, иллюстрирующая способ в соответствии с одним вариантом осуществления настоящего изобретения.
Подробное описание изобретения
Варианты осуществления настоящего изобретения относятся к способам и устройству для измерения и контроля глубины оборудования в стволе скважины. Способы настоящего изобретения используют датчики или устройства формирования изображения для слежения за перемещением инструмента в стволе скважины. Поэтому способы настоящего изобретения особенно полезны для слежения за инструментом в стволе скважины в зависимости от осевой глубины, которой является расстояние от поверхности (устья скважины) вдоль оси скважины до местоположения инструмента. В отличие от вышеуказанных способов, которые более пригодны для определения вертикальной глубины, которой является вертикальное расстояние от земной поверхности независимо от траектории ствола буровой скважины.
В соответствии с вариантами осуществления настоящего изобретения для отслеживания или согласования изображений ствола скважины могут быть использованы одно или более устройств формирования изображения (датчиков). Устройствами формирования изображения или датчиками могут быть любые известные в данной области техники устройства, используемые для формирования изображения скважины, включая оптические, акустические и резистивные устройства формирования изображения. Слежение по изображению в сочетании с опорным расстоянием, которое может быть внутренним или внешним по отношению к устройствам формирования изображения, обеспечивает возможность слежения за перемещением инструмента в скважине.
Возможность слежения за перемещением инструмента в буровой скважине обеспечивает пользователю возможность проведения скважинных операций с более высокой точностью в зависимости от глубины скважины. В соответствии с некоторыми вариантами осуществления настоящего изобретения возможность точного слежения за инструментом в зависимости от глубины скважины позволяет иметь инструмент, выполняющий операции автоматически, когда он достигает заранее установленной глубины. То есть варианты осуществления настоящего изобретения обеспечивают автономный контроль глубины инструмента в стволе скважины.
Варианты осуществления настоящего изобретения могут быть использованы в различных скважинных операциях, таких как бурение, каротаж, возбуждение и эксплуатация скважины. Устройство настоящего изобретения, обеспечивающее возможность слежения по изображению ствола скважины для контроля глубины, может быть включено в любой инструмент, используемый в скважине. Для ясности в следующем описании, приводимом с целью иллюстрации вариантов осуществления настоящего изобретения, будет использоваться скважинный инструмент, который обычно используется в каротажных измерениях. Однако специалистам в данной области техники будет понятно, что варианты осуществления настоящего изобретения не ограничиваются конкретными примерами, описанными ниже.
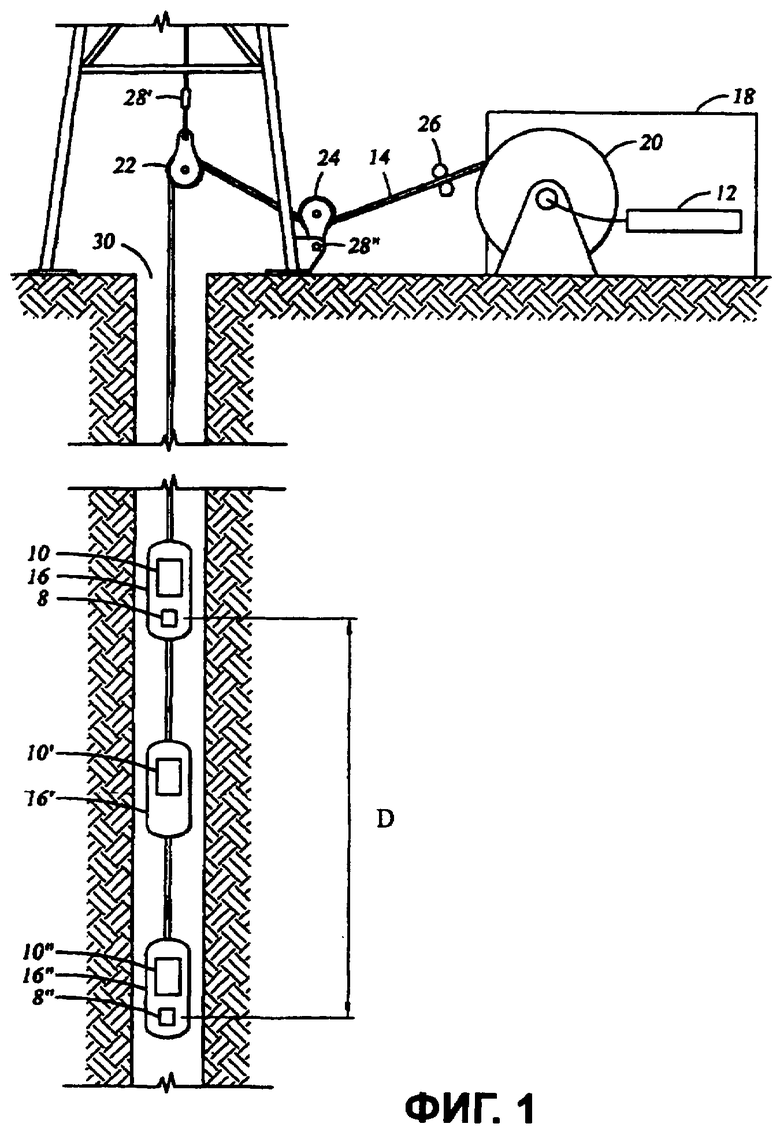
Фиг.1 изображает кабельное каротажное устройство, расположенное в буровой скважине 30. Как показано, множество каротажных инструментов 16 (например, 16′ и 16″) могут быть соединены для образования колонны инструментов. Каротажные инструменты 16 соединены с каротажным кабелем 14, который может также обеспечивать передачу данных вверх по стволу скважины. При выполнении каротажа методом LWD собранные данные могут храниться в инструменте и передаваться на поверхность, используя пульсацию бурового раствора. Каждый каротажный инструмент 16 может включать один или более скважинных электронных приборов 10. Каротажный инструмент 16 может также включать один или более датчиков (или устройств формирования изображения) 8. Устройство формирования изображения/датчик 8 может быть использован для контроля глубины инструмента в стволе скважины в соответствии с вариантами осуществления настоящего изобретения. Предпочтительно, если каротажные инструменты 16-16″ жестко соединены друг с другом в осевом направлении, так как это связано с обеспечиваемой точностью измерений. Например, можно заменить/модифицировать каротажный кабель, показанный на Фиг.1, соединяющий каротажные инструменты 16-16″, более жестким в осевом направлении элементом или устройством.
Каротажный кабель 14 соединен на поверхности с лебедкой в каротажной станции 18, которой может быть передвижная каротажная станция или морская каротажная станция. Каротажный кабель 14 проходит через шкивы 22 и 24. Каротажный кабель 14 также может проходить через устройство для измерения глубины 26, которое известно как комплексная система измерения глубины с роликом (IDW), и обеспечивает показатель глубины в обычном подходе. В соответствии с вариантами осуществления настоящего изобретения устройство для измерения глубины 26 может не использоваться или может использоваться для получения дополнительных данных о глубине.
Каротажный кабель 14 также соединен с компьютером для сбора данных 12. Компьютером для сбора данных 12 может быть цифровой компьютер, имеющий такие компоненты, как память, центральный процессор, одно или более вспомогательных запоминающих устройств, например дисковое запоминающее устройство, и монитор. Компьютер для сбора данных 12 может содержать модем или другое устройство связи для получения и передачи данных через каротажный кабель 14. В соответствии с некоторыми вариантами осуществления настоящего изобретения компьютер для сбора данных 12 может быть встроенным в скважинный инструмент 16. В данном случае встроенный компьютер для сбора данных 12 может включать только процессор и память с программой для осуществления слежения по изображению; он может не включать некоторые компоненты, описанные ниже.
В соответствии с некоторыми вариантами осуществления настоящего изобретения в комплект инструментов могут быть включены дополнительные инструменты 16′ и 16″. Если один из данных инструментов также имеет устройство формирования изображения/датчик 8′ (помимо устройства формирования изображения 8 в инструменте 16), обеспечивается возможность слежения по изображениям, используя внешнее (по отношению к устройству формирования изображения) опорное расстояние (такое как расстояние D между двумя устройствами формирования изображения) для слежения по изображениям. Отмечается, что варианты осуществления настоящего изобретения могут также использовать более двух устройств формирования изображения. В показанном конкретном варианте осуществления два датчика 8 и 8″ размещены в разных скважинных инструментах 16 и 16″, как показано. В соответствии с некоторыми вариантами осуществления настоящего изобретения два или более устройств формирования изображения могут быть размещены в одном и том же инструменте.
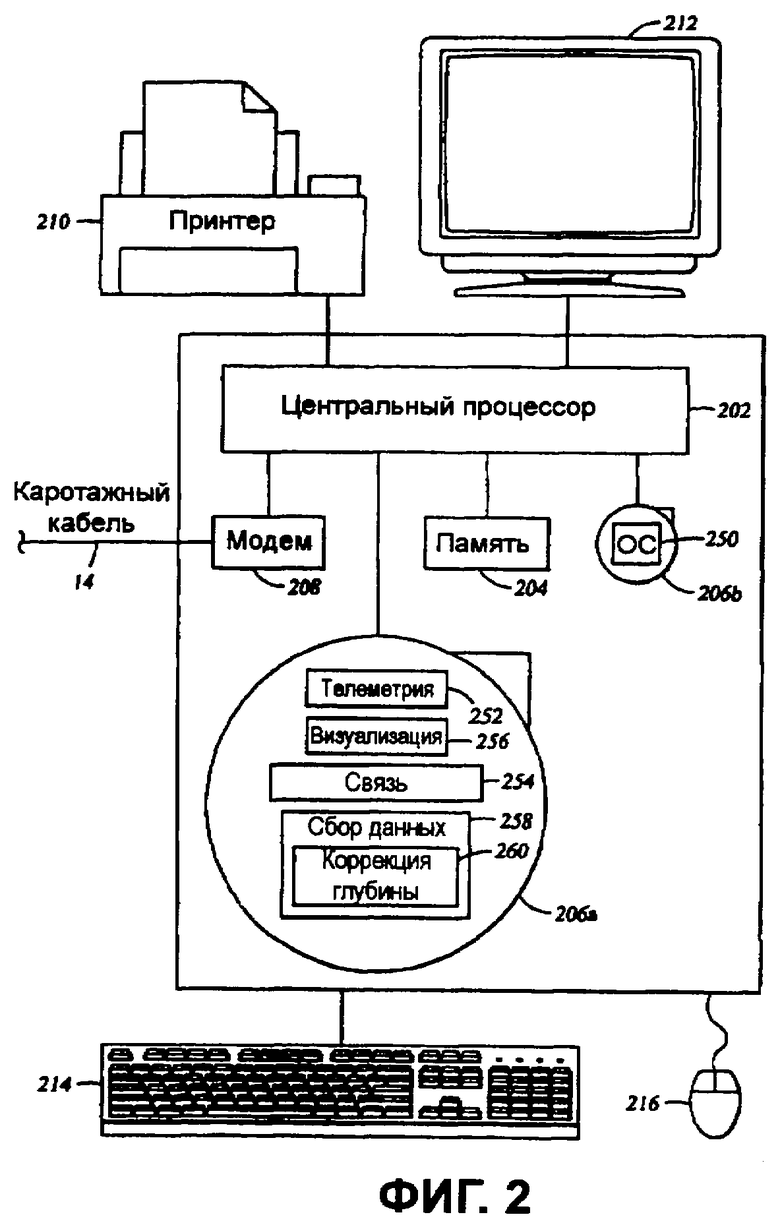
На Фиг.2 показана типовая схема компьютера для сбора данных 12. Компьютер для сбора данных 12, расположенный на поверхности, содержит один или более центральных процессоров (CPU) 202. На чертеже показан только один CPU. Однако в некоторых вариантах осуществления может быть использовано несколько CPU. CPU 202 соединен с одним или более модулями памяти 204 (не показанными). Модули памяти могут включать, например, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM) и стираемое программируемое постоянное запоминающее устройство (EPROM). CPU 202 также соединен с одним или более вспомогательными запоминающими устройствами 206, например 206а и 206b. CPU 202 также соединен с модемом или устройством связи 208. Модем или устройство связи 208 соединено с каротажным кабелем 14 и используется для передачи и получения данных через каротажный кабель 14.
Компьютер для сбора данных 12 может быть также соединен с устройствами ввода-вывода, такими как принтер 210, монитор 212, клавиатура 214 или мышь 216. Вспомогательные запоминающие устройства хранят различные компьютерные программы для управления сбором данных через каротажный кабель 14. Данные компьютерные программы могут включать операционную систему (operating system - OS) 250, программное обеспечение обработки телеметрической информации 252, программное обеспечение связи 254, программное обеспечение отображения и визуализации данных 256 и программное обеспечение сбора данных 258. Программное обеспечение сбора данных может также включать программное обеспечение коррекции показателя глубины 260.
Для слежения по изображению варианты осуществления настоящего изобретения могут использовать любое известное в данной области техники устройство формирования изображения/датчик, включая оптическое, акустическое, инфракрасное, микроволновое и резистивное устройство формирования изображения. Хотя варианты осуществления настоящего изобретения могут использовать различные типы устройств формирования изображения, в приведенном ниже описании будет использовано оптическое устройство формирования изображения для иллюстрации вариантов осуществления настоящего изобретения. В данной области техники хорошо известно использование для слежения оптических устройств формирования изображения, таких как оптическая мышь для ввода данных в компьютер, которая раскрыта в патенте США № 6281882, выданном Gordon и др.
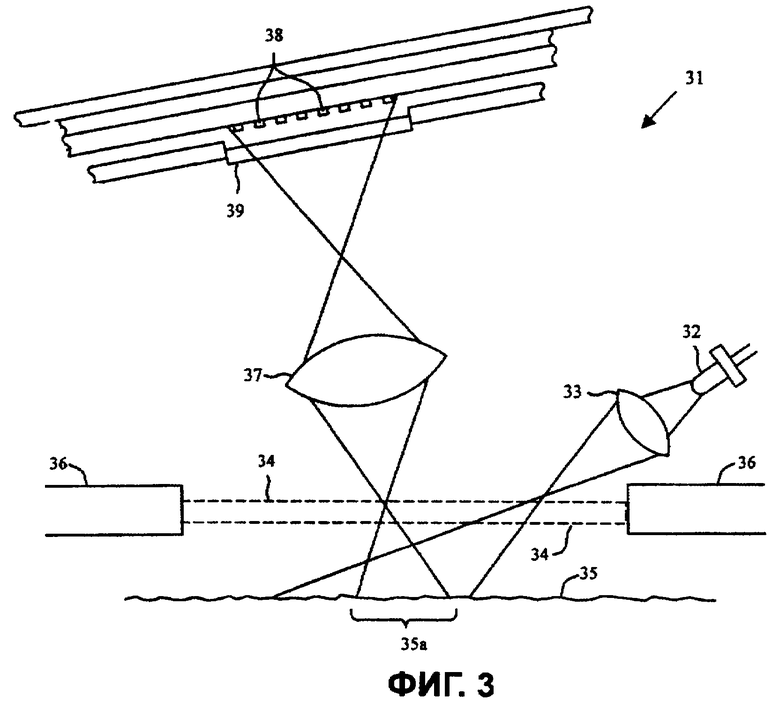
На Фиг.3 изображено упрощенное представление вида сбоку в разрезе устройства формирования изображения (формирователя изображения) 31, которое может быть использовано с вариантами осуществления настоящего изобретения. Как показано на Фиг.3, источник света 32, которым может быть инфракрасный светодиод или другой подходящий источник света, излучает свет, который может проецироваться с помощью линзы 33 (которая может быть составным элементом блока источника света) через окно 34 в корпусе 36 и на участок 35а, который является частью ствола скважины 35. Освещение поверхностей стенок скважины может осуществляться под углом, отличающимся от 90°, как показано на Фиг.3. Освещение под углом менее 90° может выделять рисунок из ярких и темных участков, образуемых неровностями на поверхности.
Как показано на Фиг.3, изображение освещенного участка 35а проецируется через оптическое окно 39 на матрицу 38 фотоприемников. Это может быть обеспечено с помощью линзы 37. Окно 39 и линза 37 могут быть также объединены в один элемент. Фотоприемники могут составлять матрицу фотоприемников, при этом каждый фотоприемник является фототранзистором. Примеры матриц фотоприемников, которые могут быть использованы с вариантами осуществления настоящего изобретения, могут включать датчики на основе приборов с зарядовой связью (CCD) и датчики на комплементарной структуре металл-оксид-полупроводник (CMOS).
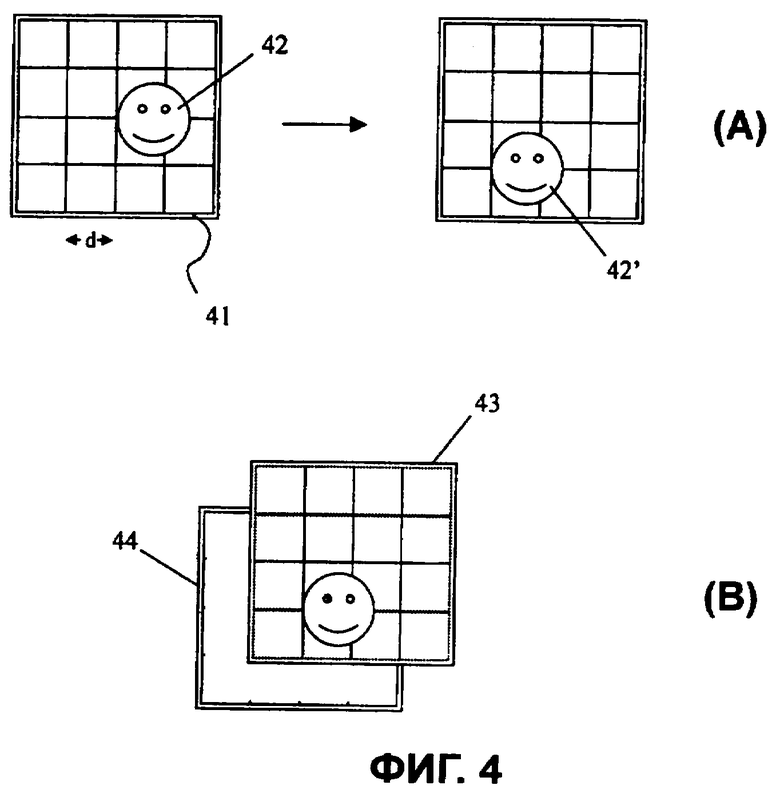
На Фиг.4А показан вариант использования датчика изображения, такого как показанный на Фиг.3, для слежения за глубиной инструмента в стволе скважины. Как показано на Фиг.4А, устройство формирования изображения 41 имеет матрицу фотоприемников с 4×4 элементами, которая имеет разрешение d, равное расстоянию между соседними элементами. Вначале устройство формирования изображения 41 получает изображение 42 на определенном участке матрицы. Изображением 42 может быть любой заметный элемент в поле изображения (показанном на Фиг.3 под номером 35а). Когда инструмент переместился на определенное расстояние, устройство формирования изображения получает изображение 42′, которое расположено на другом участке матрицы. Для того чтобы определить величину перемещения инструмента, можно определить величину смещения изображения в матрице фотоприемников.
На Фиг.4В показано, что если переместить устройство формирования изображения 43 в новую позицию, показанную с помощью устройства формирования изображения 44, то изображение 42′ окажется в том самом месте в матрице фотоприемников, как если бы инструмент никуда не перемещался. В данном конкретном примере устройство формирования изображения 43 сместилось на расстояние d вниз и на расстояние d влево, чтобы занять местоположение устройства формирования изображения 44. Поэтому можно сделать заключение о том, что изображение 42′ сместилось из позиции 42 (Фиг.4А) на расстояние d вниз и на расстояние d влево. Следовательно, инструмент переместился на расстояние d вверх и на расстояние d вправо в данном конкретном примере.
В примере, проиллюстрированном на Фиг.4А и 4В, в качестве опорного расстояния для слежения за глубиной или перемещением инструмента используется внутренний размер в датчике (т.е. расстояние d между соседними элементами). Специалистам в данной области техники будет понятно, что варианты осуществления настоящего изобретения могут также использовать внешние опорные расстояния для оценки глубины или расстояния перемещения инструмента в скважине. Для использования внешнего опорного расстояния (т.е. когда опорное расстояние не находится в одном устройстве формирования изображения), можно использовать два или более устройств формирования изображения/датчиков с известным расстоянием между устройствами формирования изображения/датчиками.
На Фиг.5 изображен один пример, который использует два устройства формирования изображения 51 и 52, которые расположены в скважинном инструменте на расстоянии D12. Изображение 53 может сначала быть получено первым устройством формирования изображения 51, и затем инструмент переместился на расстояние D12, тогда то же самое изображение 53′ будет получено вторым устройством формирования изображения 52. Таким образом, когда второе устройство формирования изображения 52 воспринимает то же самое изображение, которое ранее воспринималось первым устройством формирования изображения 51, можно сделать заключение о том, что инструмент переместился на расстояние, равное расстоянию между двумя устройствами формирования изображения 51 и 52. Хотя в данном примере используется только два устройства формирования изображения, специалистам в данной области техники будет понятно, что можно также использовать большее количество устройств формирования изображения, размещенных на равных или неравных расстояниях друг от друга для слежения за расстоянием перемещения инструмента в скважине.
Хотя вышеприведенные примеры используют оптические устройства формирования изображения для иллюстрации вариантов осуществления настоящего изобретения, специалистам в данной области техники будет понятно, что варианты осуществления настоящего изобретения могут также использовать другие типы устройств формирования изображения или датчиков. Как было отмечено выше, варианты осуществления настоящего изобретения могут также использовать акустический (или звуковой), резистивный и другие датчики. Акустические или звуковые датчики широко использовались в скважинных устройствах формирования изображений. Примеры таких устройств формирования изображения включают двухполюсный формирователь изображения акустических волн (DSI®) разработки компании Schlumberger Technology Corp. (Хьюстон, шт. Техас). Подобным образом резистивные датчики использовались в скважинных устройствах формирования изображения. Примеры скважинных устройств формирования изображения, использующих резистивные датчики, включают устройство формирования микроизображения продуктивного пласта (FMI®) разработки компании Schlumberger Technology Corp. (Хьюстон, шт. Техас).
Кроме того, устройства формирования изображения настоящего изобретения могут быть установлены в скважинном инструменте, муфте, замке или насосно-компрессорной трубе. В большинстве случаев для слежения за перемещением (или глубиной) инструмента в стволе скважины не требуется высокое разрешение (например, менее 1 см). Поэтому нет необходимости в размещении устройства формирования изображения около стенки скважины. Однако, если требуется слежение с очень высокой точностью, можно разместить данные устройства формирования изображения на шарнирно-сочлененном рычаге так, чтобы, например, они могли быть прижаты к стенке скважины.
С вариантами осуществления настоящего изобретения пользователь может выполнять различные операции в скважине на основе глубины погружения инструмента. Некоторые такие операции могут заранее программироваться таким образом, что инструмент автоматически будет производить работу, когда он достигнет определенной глубины. Примеры таких автономных операций, проводимых на основе контроля глубины, могут включать использование скважинного перфоратора, который опускается в скважину. Такой перфоратор может включаться автоматически, когда он достигает заранее установленной глубины.
На Фиг.6 показан способ 60 в соответствии с одним вариантом осуществления настоящего изобретения. Как показано, первое изображение получается с помощью устройства формирования изображения в первый момент времени (этап 61). Как было отмечено выше, может быть использовано любое подходящее устройство формирования изображения. Спустя некоторое время получают второе изображение (этап 62). Затем оба изображения сравниваются и согласовываются путем сдвига одного из двух изображений таким образом, чтобы оба изображения накладывались одно на другое (этап 63). Величина сдвига, требующаяся для наложения двух изображений, сравнивается с опорным расстоянием, которое может быть внутренним или внешним по отношению к устройству формирования изображения, для того чтобы определить местоположение или глубину инструмента в скважине (этап 64). Вышеописанные этапы могут повторяться многократно по мере необходимости. Затем скважинная операция может выполняться на основе определенного местоположения или глубины инструмента в скважине (этап 65).
Варианты осуществления настоящего изобретения могут иметь одно или более следующих преимуществ. Варианты осуществления настоящего изобретения могут обеспечивать точное измерение глубины в скважине. Измерения глубины могут производиться автономно без вмешательства пользователя. Измерения глубины могут быть интегрированы в систему измерений таким образом, чтобы виды деятельности, которые должны проводиться в зависимости от существующих скважинных измерений, могли быть локализованы с высокой точностью. Варианты осуществления настоящего изобретения могут быть также использованы для решения проблемы скачкообразного перемещения вследствие проведения измерений глубины в скважине.
Хотя настоящее изобретение описано относительно ограниченного количества вариантов осуществления, специалистам в данной области техники, владеющим преимуществами данного раскрытия, будет понятно, что другие варианты осуществления могут быть предложены без отхода от объема настоящего изобретения, раскрытого в данном изобретении. Следовательно, объем настоящего изобретения должен ограничиваться только прилагаемой формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ АНАЛИЗА ВРЕМЕННОГО ИНТЕРВАЛА МЕЖДУ ПРИЧИНОЙ И СЛЕДСТВИЕМ | 2003 |
|
RU2354998C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ В СКВАЖИНЕ | 2016 |
|
RU2626486C1 |
| ВЫЧИСЛЕНИЕ СКОРОСТИ И ГЛУБИНЫ БУРЕНИЯ ДЛЯ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2013 |
|
RU2582608C1 |
| СКВАЖИННЫЕ УСТРОЙСТВА, УПРАВЛЯЕМЫЕ ПО РАДИАЛЬНОМУ ПОЛОЖЕНИЮ, И СПОСОБЫ ИХ ПРИМЕНЕНИЯ | 2004 |
|
RU2319833C2 |
| ИНСТРУМЕНТ И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА ПЛАСТА | 2009 |
|
RU2457326C2 |
| СИСТЕМА ДВУСТОРОННЕЙ ТЕЛЕМЕТРИИ ПО БУРИЛЬНОЙ КОЛОННЕ ДЛЯ ИЗМЕРЕНИЙ И УПРАВЛЕНИЯ БУРЕНИЕМ | 2006 |
|
RU2413841C2 |
| ОПРЕДЕЛЕНИЕ ВОДОНАСЫЩЕННОСТИ И ФРАКЦИИ ПЛАСТА ПЕСКА С ИСПОЛЬЗОВАНИЕМ ИНСТРУМЕНТА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ В БУРОВОЙ СКВАЖИНЕ, ИНСТРУМЕНТА ПОПЕРЕЧНОГО ИНДУКЦИОННОГО КАРОТАЖА И ТЕНЗОРНОЙ МОДЕЛИ ВОДОНАСЫЩЕННОСТИ | 1999 |
|
RU2242029C2 |
| УДАЛЕНИЕ ПСЕВДОЭХО- СИГНАЛОВ ИЗ АКУСТИЧЕСКИХ ВОЛН | 2014 |
|
RU2630005C2 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ БУРОВЫХ РАБОТ НА НЕФТЯНОМ МЕСТОРОЖДЕНИИ С ИСПОЛЬЗОВАНИЕМ СПОСОБОВ ВИЗУАЛИЗАЦИИ | 2008 |
|
RU2452855C2 |
| МОДЕЛИРОВАНИЕ ПЕРЕХОДНОГО РЕЖИМА КНБК/БУРИЛЬНОЙ КОЛОННЫ В ПРОЦЕССЕ БУРЕНИЯ | 2008 |
|
RU2461707C2 |

Изобретение относится к способам и устройствам для управления скважинными инструментами в зависимости от их глубины в буровой скважине. Техническим результатом является повышение точности измерения глубины и управления скважинным оборудованием на точной глубине во время скважинных операций. Способ включает получение первого изображения скважины, используя устройство формирования изображения, связанное с инструментом, получение второго изображения скважины, используя устройство формирования изображения по истечении выбранного периода времени, согласование первого изображения со вторым изображением путем смещения одного из первого и второго изображений, определение величины смещения, и сравнение величины смещения с опорным расстоянием для определения расстояния перемещения инструмента. 4 н. и 13 з.п. ф-лы, 6 ил.
1. Способ слежения за местоположением инструмента в буровой скважине, включающий этапы:
(a) получения первого изображения скважины, используя устройство формирования изображения, связанное с инструментом;
(b) получения второго изображения скважины, используя устройство формирования изображения по истечении выбранного периода времени;
(c) согласования первого изображения со вторым изображением путем смещения одного из первого и второго изображений;
(d) определения величины смещения; и
(e) сравнения величины смещения с опорным расстоянием для определения расстояния перемещения инструмента в скважине,
причем этапы (а-е) выполняют в скважине.
2. Способ по п.1, в котором опорным расстоянием является опорная длина в устройстве формирования изображения.
3. Способ по п.1, повторяющий этапы (а)-(е).
4. Способ по п.3, включающий также выполнение скважинной операции, когда расстояние перемещения инструмента соответствует выбранному критерию.
5. Способ по п.4, в котором выполнение скважинной операции запускается автоматически без вмешательства пользователя.
6. Способ по п.1, в котором устройством формирования изображения является устройство, выбираемое из группы устройств, состоящей из оптического устройства формирования изображения, акустического устройства формирования изображения, инфракрасного устройства формирования изображения, микроволнового устройства формирования изображения и резистивного устройства формирования изображения.
7. Способ слежения за местоположением инструмента в буровой скважине, включающий этапы:
(a) получения изображения элемента буровой скважины, используя первое устройство формирования изображения, связанное с инструментом;
(b) перемещения инструмента в стволе скважины; и
(c) регистрации расстояния перемещения инструмента, когда изображение элемента получено вторым устройством формирования изображения, расположенным на расстоянии от первого устройства формирования изображения, в котором расстояние перемещения инструмента равно расстоянию между первым устройством формирования изображения и вторым устройством формирования изображения,
причем этапы (а-с) выполняют в скважине.
8. Способ по п.7, повторяющий этапы (а)-(с).
9. Способ по п.8, включающий также выполнение скважинной операции, когда расстояние перемещения инструмента соответствует выбранному критерию.
10. Способ по п.9, в котором выполнение скважинной операции запускается автоматически без вмешательства пользователя.
11. Способ по п.7, в котором первым устройством формирования изображения и вторым устройством формирования изображения являются однотипные устройства, выбираемые из группы устройств, состоящей из оптического устройства формирования изображения, акустического устройства формирования изображения, инфракрасного устройства формирования изображения, микроволнового устройства формирования изображения и резистивного устройства формирования изображения.
12. Система для слежения за перемещением инструмента в буровой скважине, включающая:
процессор и память, установленные на инструменте, в котором память хранит программу, содержащую инструкции для:
(a) получения первого изображения скважины, используя устройство формирования изображения, связанное с инструментом;
(b) получения второго изображения скважины, используя устройство формирования изображения по истечении выбранного периода времени;
(c) согласования первого изображения со вторым изображением путем смещения одного из первого и второго изображений;
(d) определения величины смещения; и
(e) сравнения величины смещения с опорным расстоянием для определения расстояния перемещения инструмента в скважине.
13. Система по п.12, в которой устройство включено в состав инструмента.
14. Система по п.12, в которой устройством формирования изображения является устройство, выбираемое из группы устройств, состоящей из оптического устройства формирования изображения, акустического устройства формирования изображения, инфракрасного устройства формирования изображения, микроволнового устройства формирования изображения и резистивного устройства формирования изображения.
15. Система для слежения за перемещением инструмента в буровой скважине, содержащая:
процессор и память, установленные на инструменте, в которой память хранит программу, содержащую инструкции для:
(a) получения изображения элемента скважины, используя первое устройство формирования изображения, связанное с инструментом;
(b) перемещения инструмента в буровой скважине; и
(c) регистрации расстояния перемещения инструмента, когда изображение элемента буровой скважины получено вторым устройством формирования изображения, расположенным на расстоянии от первого устройства формирования изображения, в котором расстояние перемещения инструмента равно расстоянию между первым устройством формирования изображения и вторым устройством формирования изображения.
16. Система по п.15, в которой система включена в состав инструмента.
17. Система по п.15, в которой первым устройством формирования изображения и вторым устройством формирования изображения являются однотипные устройства, выбираемые из группы устройств, состоящей и оптического устройства формирования изображения, акустического устройства формирования изображения, инфракрасного устройства формирования изображения, микроволнового устройства формирования изображения и резистивного устройства формирования изображения.
| US 20050149265 А1, 07.07.2005 | |||
| Регистратор перемещения бурового инструмента | 1959 |
|
SU127214A1 |
| Способ определения глубины в скважине | 1976 |
|
SU711280A1 |
| ЕР 1806473 А1, 11.07.2007 | |||
| WO 2006086417 А1, 17.08.2006. | |||

