ПРЕДПОСЫЛКИ
[0001] При выполнении многих операций бурения и каротажа желательно иметь скорость бурения или скорость проходки (СП) для скважинных инструментов. Обычно вследствие ограниченных вычислительных ресурсов в скважинных приборах скорость проходки и измеренная глубина имеются только на поверхности. Имеются способы оценивания в скважине скорости проходки на основании данных скважинных акселерометров, но они не являются надежными вследствие тяжелых скважинных условий (например, ударов и вибраций). Кроме того, в отрасли промышленности имеется тенденция к бурению более глубоких скважин с меньшими диаметрами, в которых скважинные условия становятся все более тяжелыми.
КРАТКОЕ ИЗЛОЖЕНИЕ
[0002] В общем, согласно одному аспекту изобретение относится к способу управления операцией бурения в подземном пласте. Способ включает в себя образование с помощью первого датчика компоновки низа бурильной колонны (КНБК) и во время операции бурения первой временной каротажной диаграммы данных, представляющей параметр буровой скважины вдоль траектории бурения, образование с помощью второго датчика компоновки низа бурильной колонны во время операции бурения второй временной каротажной диаграммы данных, представляющей параметр бурения вдоль траектории бурения, определение с помощью компьютерного процессора компоновки низа бурильной колонны и во время операции бурения временного сдвига путем сравнения первой временной каротажной диаграммы данных и второй временной каротажной диаграммы данных, при этом смещением первой и второй временных каротажных диаграмм данных в соответствии с временным сдвигом максимизируют коэффициент корреляции первой и второй временных каротажных диаграмм данных, определение в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных скорости бурения на основании временного сдвига и заранее заданного расстояния между первым датчиком и вторым датчиком и выполнение операции бурения на основании скорости бурения.
[0003] Другие аспекты изобретения станут понятными из нижеследующего подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0004] Прилагаемыми чертежами иллюстрируются несколько вариантов осуществления вычисления скорости и глубины бурения для скважинных инструментов и они не должны считаться ограничивающими объем этого вычисления, при этом для вычисления скорости и глубины бурения для скважинных инструментов можно предположить другие столь же эффективные варианты осуществления. На чертежах:
[0005] фиг. 1 - схематичный вид места расположения скважины с показом операции бурения, при которой могут быть реализованы один или несколько вариантов осуществления вычисления скорости и глубины бурения для скважинных инструментов;
[0006] фиг. 2 - структурная схема системы для вычисления скорости и глубины бурения согласно одному или нескольким вариантам осуществления;
[0007] фиг. 3 - блок-схема последовательности действий при вычислении скорости бурения для скважинных инструментов согласно одному или нескольким вариантам осуществления;
[0008] фигуры 4.1-4.11 - примеры вычислений скорости и глубины бурения для скважинных инструментов согласно одному или нескольким вариантам осуществления; и
[0009] фиг. 5 - структурная схема компьютерной системы, при использовании которой можно реализовать один или несколько вариантов осуществления вычисления скорости и глубины бурения для скважинных инструментов.
ПОДРОБНОЕ ОПИСАНИЕ
[0010] Аспекты настоящего раскрытия показаны на идентифицированных выше чертежах и описываются ниже. В описании аналогичные или идентичные позиции используются для идентификации одинаковых или подобных элементов. Чертежи не обязательно выполнены в масштабе и для ясности и выразительности некоторые компоненты могут быть показаны в увеличенном масштабе или схематично.
[0011] Аспекты настоящего раскрытия включают в себя способ, систему и считываемый компьютером носитель, в которых устранены упомянутые выше недостатки способов оценивания скорости и глубины проходки из предшествующего уровня техники. В одном или нескольких вариантах осуществления датчики одного вида размещают на известном расстоянии друг от друга в компоновке низа бурильной колонны (КНБК), чтобы временные каротажные диаграммы данных, собираемые на двух различных местах, сравнивать для вычисления временного сдвига, приводящего к максимальной корреляции между сдвинутыми во времени каротажными диаграммами данных. В соответствии с этим по временному сдвигу и известному расстоянию между датчиками вычисляют почти текущие скорость и глубину проходки.
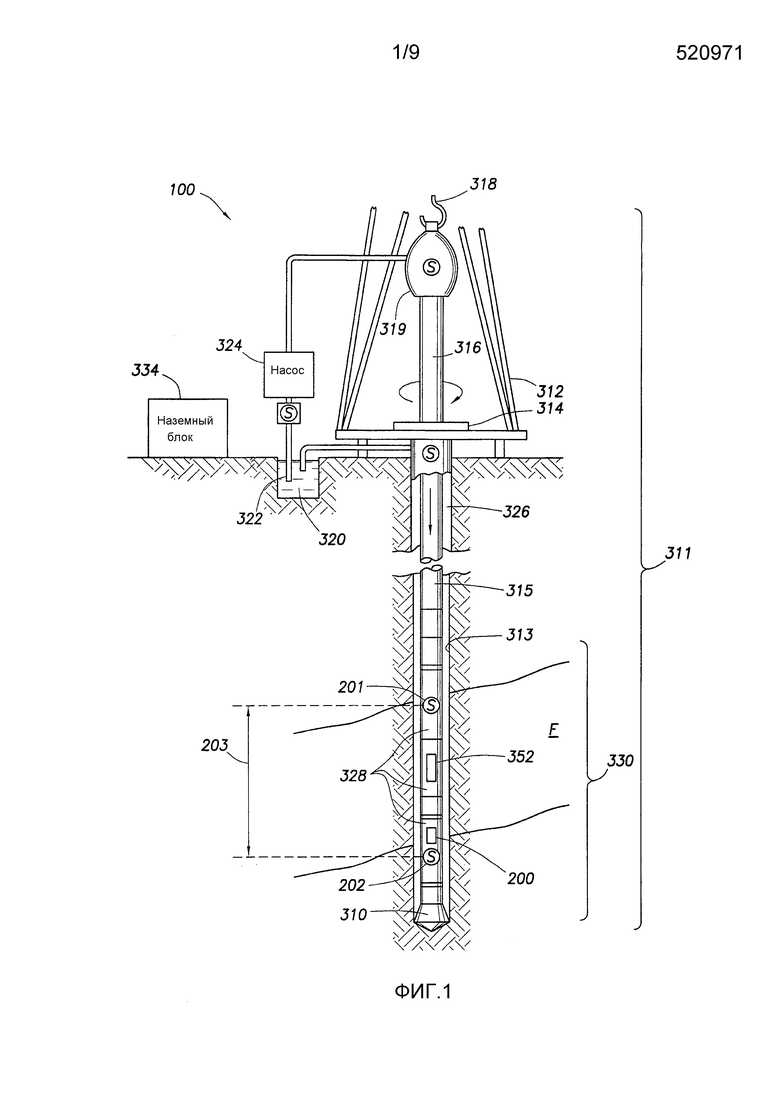
[0012] На фиг. 1 представлен схематичный вид места (100) расположения скважины с показом операции бурения. Место (100) расположения скважины включает в себя буровую систему (311) и наземный блок (334). В показанном варианте осуществления буровая скважина (313) образована вращательным бурением, способом, который хорошо известен. Однако специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, должно быть понятно, что настоящее изобретение также найдет применение при других технологиях бурения помимо обычного вращательного бурения (например, наклонном бурении с помощью забойного двигателя) и не ограничено наземными буровыми установками.
[0013] Буровая система (311) включает в себя бурильную колонну (315), подвешенную в буровой скважине (313), с буровым долотом (310) на нижнем конце. Кроме того, буровая система (311) включает в себя наземную платформу и узел (312) буровой вышки, расположенный над буровой скважиной (313), проникающей в подземный пласт (F). Узел (312) включает в себя роторный стол (314), ведущую трубу (316), буровой крюк (318) и вертлюг (319). Бурильная колонна (315) приводится во вращение роторным столом (314), получающим энергию от непоказанного средства, который находится в зацеплении с ведущей трубой (316) на верхнем конце бурильной колонны. Бурильная колонна (315) подвешена на буровом крюке (318), прикрепленном к талевому блоку (также непоказанному) через ведущую трубу (316) и вертлюг (319), который обеспечивает вращение бурильной колонны относительно бурового крюка.
[0014] Буровая система (311) также включает в себя промывочную жидкость или буровой раствор (320), сохраняемый в емкости (322), образованной на месте расположения скважины. Насос (324) подает буровой раствор (320) внутрь бурильной колонны (315) через отверстие в вертлюге (319), вынуждая буровой раствор протекать, как показано направленной стрелкой, вниз через бурильную колонну (315). Буровой раствор (320) выходит из бурильной колонны (315) через отверстия в буровом долоте (310) и затем продвигается вверх через область между внешней поверхностью бурильной колонны (315) и стенкой буровой скважины (313), называемой кольцевым пространством (326). Таким образом, буровой раствор (320) смазывает буровое долото (310) и выносит на поверхность обломки выбуренной породы, когда он возвращается в емкость (322) для повторного использования.
[0015] Бурильная колонна (315) также включает в себя компоновку (330) низа бурильной колонны вблизи бурового долота (310) (иначе говоря, на расстоянии нескольких длин утяжеленной бурильной трубы от бурового долота). Компоновка (330) низа бурильной колонны обладает функциональными возможностями измерения, обработки и сохранения информации, а также поддержания связи с наземным блоком. Кроме того, компоновка (330) низа бурильной колонны включает в себя утяжеленные бурильные трубы (328) для выполнения различных других измерительных функций. В частности, компоновка (330) низа бурильной колонны включает в себя прибор (200) для вычисления скорости и глубины бурения.
[0016] Датчики (Д) размещают вокруг места расположения скважины для сбора данных (возможно, в реальном времени), относительно работы на месте расположения скважины, а также условий на месте расположения скважины. Кроме того, датчики (Д) могут иметь признаки или обладать функциональными возможностями мониторов, таких как камеры (непоказанные) для получения картин работы. Наземные датчики или измерительные приборы (Д) могут быть размещены вокруг наземных систем для получения информации вокруг наземного блока, такой как давление в стояке, нагрузка на буровой крюк, глубина, крутящий момент на поверхности, число оборотов в минуту ротора, наряду с некоторыми другими. Скважинные датчики или измерительные приборы (Д) располагают вокруг бурового инструмента и/или ствола скважины для получения информации о скважинных условиях, таких как давление в стволе скважины, нагрузка на долото, крутящий момент на долоте, направление, наклон, число оборотов в минуту муфты трубы, температура инструмента, температура в кольцевом пространстве и на поверхности инструмента, наряду с некоторыми другими. Многочисленные скважинные датчики (Д) могут располагаться на различных местах в компоновке (330) низа бурильной колонны, такие как датчик (201) и датчик (202). Информация, собираемая датчиками и камерами, передается к различным частям буровой системы и/или в наземный блок (334).
[0017] При работе буровая система (311) связана с наземным блоком (334) для обмена информацией между ними. Компоновка (330) низа бурильной колонны снабжена связным вспомогательным узлом (352), который поддерживает связь с наземным блоком. Связной вспомогательный узел (352) выполнен с возможностью передачи сигналов на поверхность и приема сигналов с поверхности при использовании телеметрии по гидроимпульсному каналу связи. Связной вспомогательный узел (352) может включать в себя, например, передатчик, который формирует сигнал, такой как акустический или электромагнитный сигнал, который соответствует измеряемым параметрам бурения. Специалисту в соответствующей области техники должно быть понятно, что можно использовать многочисленные телеметрические системы, такие как системы телеметрии по гидроимпульсному каналу связи, по бурильной трубе, снабженной проводом, или другие.
[0018] Обычно ствол скважины пробуривают в соответствии с планом бурения, который разрабатывают до бурения. В плане бурения отражают оборудование, давления, траектории и/или другие параметры, которыми определяется процесс бурения на намеченном месте расположения скважины. Затем в соответствии с планом бурения выполняют бурильные работы. Однако по мере сбора информации бурильные работы могут отклоняться от плана бурения. Кроме того, по мере выполнения бурения или других работ подземные условия могут изменяться. Модель геологической среды также можно корректировать по мере сбора новой информации.
[0019] Например, мгновенную скорость проходки можно использовать для определения пропорционального коэффициента усиления, чтобы применять его в буровой системе с замкнутым контуром, вследствие чего автоматизированное регулирование траектории, осуществляемое инструментом направленного бурения, может стать более точным во время бурильных работ на протяжении различных пластов. Кроме того, глубину пробуренной наклонной скважины (вычисленную путем интегрирования скорости на протяжении некоторого периода времени) можно использовать для вычисления траектории бурения наклонной скважины. Еще одно полезное применение включает в себя построение изображения при каротаже во время бурения (КВБ), когда интервалы регистрации изображения или интервалы телеметрии можно регулировать в зависимости от скорости бурения. В общем, благодаря возможности вычисления скорости проходки направленной скважины резко повышается качество автоматического регулирования направления бурения направленной скважины при использовании, например, роторных управляемых систем, систем с колонной гибких труб и/или снабженных двигателями роторных управляемых инструментов.
[0020] Хотя подземные ресурсы не ограничены углеводородами, такими как нефть, на всем протяжении этого документа термины «нефтяное месторождение» и «разработка нефтяного месторождения» могут использоваться на равных основаниях с терминами «месторождение» и «разработка месторождения» для обозначения места, где ценные флюиды любого вида могут быть обнаружены и где необходимы действия по извлечению их. Кроме того, термины могут относиться к площадкам, на которых вещества сохраняют или накапливают после нагнетания их на поверхность при использовании буровых скважин и операций, связанных с этим процессом. Кроме того, термин «разработка месторождения» относится к полевым работам, связанным с месторождением, включая действия, относящиеся к составлению плана месторождения, бурению ствола скважины, заканчиванию скважины и/или добычи с использованием ствола скважины.
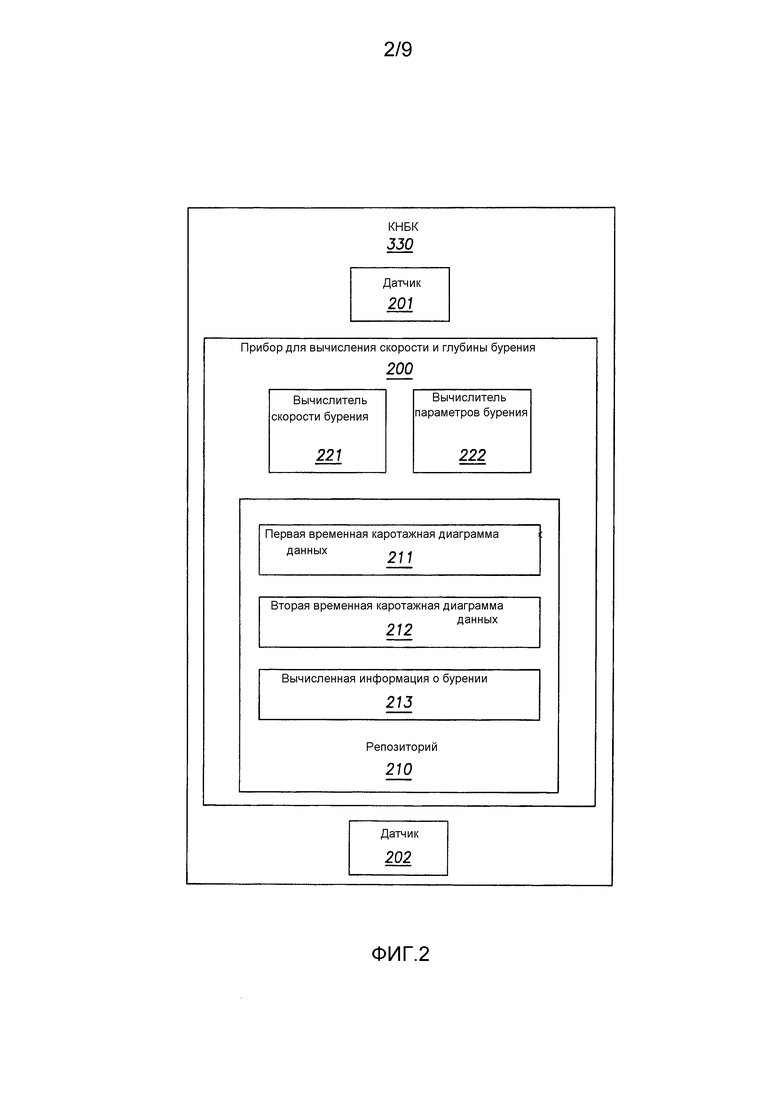
[0021] На фиг. 2 представлен схематичный вид компоновки (330) низа бурильной колонны с дополнительными элементами. В одном или нескольких вариантах осуществления изобретения один или несколько модулей и элементов, показанных на фиг. 2, могут опускаться, повторяться и/или заменяться. В соответствии с этим варианты осуществления вычисления скорости и глубины бурения для скважинных инструментов не должны считаться ограниченными конкретными компоновками модулей, показанными на фиг. 2.
[0022] Как показано на фиг. 2, компоновка (330) низа бурильной колонны включает в себя первый датчик (201), второй датчик (202) и прибор (200) для вычисления скорости и глубины бурения. В одном или нескольких вариантах осуществления первый датчик (201) выполнен с возможностью образования во время операции бурения первой временной каротажной диаграммы (211) данных, представляющей параметр буровой скважины вдоль траектории бурения, по которой образуют буровую скважину (313) из фиг. 1, приведенной выше. Кроме того, второй датчик (202) выполнен с возможностью образования во время операции бурения второй временной каротажной диаграммы (212) данных, представляющей параметр буровой скважины вдоль траектории бурения. Например, параметром буровой скважины может быть диаметр буровой скважины, пористость пластовых пород вблизи буровой скважины, наклон буровой скважины, полное магнитное поле и т.д. В одном или нескольких вариантах осуществления первый датчик (201) и второй датчик (202) расположены на различных местах в компоновке (330) низа бурильной колонны и находятся на расстоянии друг от друга (то есть, на расстоянии (203), показанном на фиг. 1). В одном или нескольких вариантах осуществления первый датчик (201) и второй датчик (202) являются датчиками подобного типа. На всем протяжении этого раскрытия термин «подобного типа» или «подобного вида» относится к по меньшей мере одному параметру буровой скважины, который можно измерять первым датчиком (201) и вторым датчиком (202). В частности, особенности профиля параметра буровой скважины вдоль буровой скважины могут обнаруживаться первым датчиком (201) и вторым датчиком (202), так что можно выполнять коррелирование результирующих каротажных диаграмм данных. В частности, корреляция становится максимальной, когда результирующие каротажные диаграммы данных сдвинуты относительно друг друга в соответствии с временным сдвигом по шкале времени. Как описывается далее относительно вычислителя (221) скорости бурения, этот временной сдвиг используют для вычисления скорости бурения.
[0023] В одном или нескольких вариантах осуществления первый датчик (201) и второй датчик (202) включают в себя датчики изображения. Например, первый датчик (201) может быть нейтронным датчиком изображения, тогда как второй датчик (202) может быть акустическим датчиком изображения. В другом примере первый датчик (201) может быть датчиком механического каверномера, тогда как второй датчик (202) может быть датчиком акустического каверномера. Хотя они являются датчиками различных типов, они являются датчиками подобного типа или подобного вида, поскольку они оба могут измерять диаметр буровой скважины и обнаруживать особенности (например, выступы поверхности буровой скважины) профиля диаметра буровой скважины вдоль буровой скважины.
[0024] В одном или нескольких вариантах осуществления первый датчик (201) и второй датчик (202) включают в себя навигационные датчики (например, акселерометры, магнитометры, гироскопы и т.д.) и результирующие каротажные диаграммы данных включают в себя навигационную информацию (такую как наклон, азимут, полное магнитное поле и т.д.). В дополнение к каротажным диаграммам данных промежуточные численные значения с навигационных датчиков (то есть, с первого датчика (201) и второго датчика (202)) также можно использовать для распознавания корреляции. Например, показания осевых акселерометров с первого датчика (201) и второго датчика (202) на двух различных осевых местах (с заранее заданным осевым смещением) в компоновке (330) низа бурильной колонны можно сопоставлять/коррелировать для определения временного сдвига между ними, чтобы максимизировать сопоставление/корреляцию. Нижеследующие формулы хорошо известны в соответствующей области техники:
[0025] Наклон =arccos(Gz/TGF), где TGF обозначает полное гравитационное поле;
[0026] Наклон =arccos(Gz), где TGF=1G (9,8 м/с2);
[0027] Наклон =arcsin(Gxy/TGF);
[0028] Наклон =arcsin(Gxy), где TGF=1G (9,8 м/с2).
[0029] Gz является показанием осевого акселерометра (показанным, например, на фиг. 4.8). Gxy является показанием акселерометра поперечного ускорения (по поперечной оси), вычисленным с использованием уравнения 
[0030] Кроме того, точно так же показания осевого магнитометра и магнитометра поперечной компоненты (показанные, например, на фиг. 4.10) можно использовать аналогичным образом. В общем случае полное магнитное поле (TMF) (показанное, например, на фиг. 4.11) можно использовать для вычисления скорости и глубины бурения. Полное магнитное поле можно вычислить из следующего уравнения 
[0031] В других случаях, особенно при парогравитационном дренировании (ПГД), скважину-близнеца размещают параллельно первой скважине, когда при бурении имеется влияние магнитного поля обсадной колонны. В этом случае (парогравитационного дренирования) величина магнитных помех (при использовании полного магнитного поля) и вектор магнитного поля помех однозначно изменяются в соответствии с осевым положением в буровой скважине (что показано, например, на фиг. 4.10). Можно размещать два или большее количество наборов магнитометров и путем сопоставления/коррелирования можно определять скорость и глубину бурения скважины. В качестве варианта параметры, вычисляемые при использовании трехкомпонентных магнитометров, такие как углы магнитного склонения и азимут, можно в равной мере использовать для согласования их точек данных, поскольку данные магнитометров содержат магнитные помехи, образующие конкретную сигнатуру на определенной глубине.
[0032] Для примера в скважине J или скважине S первый датчик (201) представляет собой навигационный датчик в роторной управляемой системе (РУС), измеряющий конкретный наклон и азимут. Второй датчик (202) представляет собой другой навигационный датчик в приборе измерений в процессе бурения (на расстоянии около 50100 футов (15,24-30,48 м), измеряющий те же самые наклон и азимут там, где ранее прошла роторная управляемая система. На практике буровая скважина (313) никогда не является совершенно прямолинейной скважиной, и эта комбинация датчиков также применима для любой типичной вертикальной скважины и/или горизонтальной скважины. На фиг. 4.7 и 4.9 показано использование наклона и азимута буровой скважины для определения скорости бурения. Азимут скважины можно вычислить из следующего уравнения, хорошо известного в соответствующей области техники:

[0033] где Gx, Gy и Gz - показания акселерометра по осям x, y и z, соответственно, и Bx, By и Bz - показания магнитометра по осям x, y и z, соответственно. Кроме того, имеются альтернативные уравнения, которые могут использовать специалисты в соответствующей области техники.
[0034] Акселерометры, подходящие для использования в навигационных датчиках, могут быть выбраны из числа по существу любых пригодных, доступных для приобретения устройств, известных в соответствующей области техники. Например, подходящими акселерометрам могут быть имеющие номер по каталогу 979-0273-001, производимые Honeywell, и номер по каталогу JA-5H175-1, производимые Japan Aviation Electronics Industry, Ltd. (JAE). В качестве варианта подходящими акселерометрами могут быть твердотельные акселерометры на основе микроэлектромеханических систем (МЭМС), которые можно получить, например, от Analog Devices, Inc. (Норвуд, Массачусетс). Такие акселерометры на основе микроэлектромеханических систем могут быть предпочтительны при некоторых применениях датчиков вблизи долота, поскольку они являются стойкими к ударным нагрузкам, рассчитанными на работу при высоких температурах и недорогими. Подходящие датчики магнитного поля могут включать в себя обычные магнитометры с насыщенным кольцевым сердечником или обычные магниторезистивные датчики, например, имеющие номер по каталогу HMC-1021D, которые можно получить от Honeywell.
[0035] В одном или нескольких вариантах осуществления первый датчик (201) и второй датчик (202) также включают в себя датчик пластового давления, скважинную камеру и датчик температуры. Дополнительные примеры каротажных диаграмм данных с датчиков подобного вида описаны ниже с обращением к фиг. 4.1-4.6.
[0036] В одном или нескольких вариантах осуществления прибор (200) для вычисления скорости и глубины бурения включает в себя вычислитель (221) скорости бурения, вычислитель (222) параметров бурения и репозиторий (210). В одном или нескольких вариантах осуществления репозиторий (210) представляет собой скважинный модуль запоминающего устройства, известный специалистам в соответствующей области техники. В частности скважинное запоминающее устройство имеет ограниченную плотность и емкость вследствие тяжелых скважинных условий. В одном или нескольких вариантах осуществления репозиторий (210) выполнен с возможностью сохранения первой временной каротажной диаграммы (211) данных, второй временной каротажной диаграммы (212) данных и вычисленной информации (213) о бурении. Кроме того, репозиторий (210) может совместно использоваться прибором (200) для вычисления скорости и глубины бурения и другими скважинными приборами, такими как приборы построения изображений при каротаже во время бурения (непоказанные), через посредство общей шины связи (непоказанной). Несколько скважинных компьютеров можно использовать для обработки данных датчиков и их можно соединять с общей шиной связи. Репозиторий (210) можно располагать где угодно в бурильной колонне (315), например, на расстоянии 10-100 футов (3,048-30,48 м) от датчиков (201) и (202). В одном или нескольких вариантах осуществления общая шина связи может быть жестко смонтированной между различными приборами или может включать в себя частично электромагнитный (ЭМ) короткий ретрансляционный участок или другую беспроводную шину связи, такую как акустические каналы связи. В соответствии с этим репозиторий (210) также выполнен с возможностью сохранения других данных (непоказанных), таких как изображения, получаемые при каротаже во время бурения, образуемые приборами построения изображений при каротаже во время бурения.
[0037] В одном или нескольких вариантах осуществления вычислитель (221) скорости бурения выполнен с возможностью определения во время операции бурения временного сдвига путем сравнения первой временной каротажной диаграммы (211) данных и второй временной каротажной диаграммы (212) данных. В частности, временной сдвиг определяется путем смещения первой временной каротажной диаграммы (211) данных и второй временной каротажной диаграммы (212) данных, например, до максимизации коэффициента корреляции. Для нахождения соответствия можно использовать другие способы, а не максимизацию коэффициента корреляции. Такие способы включают в себя максимизацию взаимной корреляции, минимизацию ошибки регрессии и т.д. В этом контексте термин «коэффициент корреляции» может использоваться для обозначения коэффициента взаимной корреляции, обратной величины ошибки регрессии и т.д. Например, если датчики (201) и (202) могут обнаруживать особенности профиля диаметра буровой скважины, временной сдвиг определяется путем сдвига (то есть, смещения) шкалы времени первой временной каротажной диаграммы (211) данных относительно шкалы времени второй временной каротажной диаграммы (212) данных до согласования соответствующих пиков, представляющих выступы на поверхности буровой скважины. Дополнительные примеры определения временного сдвига описываются ниже с обращением к фиг. 4.1-4.6.
[0038] В одном или нескольких вариантах осуществления вычислитель (221) скорости бурения выполнен с возможностью определения в пределах предварительно заданного периода времени от образования первой временной каротажной диаграммы (211) данных и второй временной каротажной диаграммы (212) данных скорости бурения на основании временного сдвига и заранее заданного расстояния между первым датчиком (201) и вторым датчиком (202). Например, заранее заданное расстояние может быть расстоянием (203), показанным на фиг. 1, тогда как скорость бурения вычисляется путем деления расстояния (203) на временной сдвиг. В одном или нескольких вариантах осуществления вычисление выполняется компьютерным процессором (непоказанным) компоновки (330) низа бурильной колонны без передачи какой-либо каротажной диаграммы данных на поверхность и без внесения задержек при передаче (как например, при телеметрии по гидроимпульсному каналу связи). В соответствии с этим заранее заданным периодом времени может быть одна секунда, одна минута или период времени, значительно меньший, чем задержка при передаче на поверхность при использовании телеметрии по гидроимпульсному каналу связи. В частности, вычисление скорости бурения в пределах заранее заданного периода времени означает вычисление почти текущей скорости бурения или вычисление скорости бурения в реальном времени. В одном или нескольких вариантах осуществления вычислитель (221) скорости бурения дополнительно выполнен с возможностью определения в пределах заранее заданного периода времени глубины бурения путем по меньшей мере математического интегрирования скорости бурения на протяжении времени.
[0039] В одном или нескольких вариантах осуществления прибор (200) для вычисления скорости и глубины бурения также включает в себя вычислитель (222) параметров бурения, который выполнен с возможностью вычисления различных параметров бурения и сохранения их в качестве вычисленной информации (213) о бурении в репозитории (210). Например, вычислитель (222) параметров бурения на основании скорости бурения и в пределах заранее заданного периода времени вычисляет параметры, такие как скорость повышения кривизны ствола скважины, скорость поворота, резкое искривление ствола скважины, эффективный гравитационный угол положения торца долота и т.д. В соответствии с этим угол положения торца долота и/или степень отклонения можно регулировать в реальном времени на основании по меньшей мере одного из этих параметров бурения.
[0040] Как известно специалистам в соответствующей области техники, положение торца долота представляет собой угол, под которым буровое долото продвигается или направляется относительно гравитационного поля земли. В применениях направленного наклонного бурения «угол положения торца долота равен 0°» относится к противоположной стороне гравитационного поля. Если требуемый угол положения торца долота положить равным 0°, следует ожидать, что инструмент будет выполнять чистый набор кривизны. Точно так же «угол положения торца долота равен 90°», «угол положения торца долота равен 270°» и «угол положения торца долота равен 180°» соответствуют чистому повороту направо, чистому повороту налево и чистому понижению наклона, соответственно. Степень отклонения (СО) соответствует крутизне кривой. Например, степени отклонения 0%, 50% и 100% соответствуют нейтральному бурению (без наклона), 50% максимальной кривизны (максимального резкого искривления ствола скважины) и максимальной кривизне (максимальному резкому искривлению ствола скважины), соответственно. В общем случае при регулировании угла положения торца долота и степени отклонения посредством системы направленного наклонного бурения (например, роторной управляемой системы, системы с использованием гибких труб, системы вращательного управляемого бурения с забойным двигателем и т.д.) можно пробуривать двумерные и трехмерные скважины.
[0041] На рынке имеются различные роторные управляемые системы (РУС). В зависимости от типа роторной управляемой системы можно использовать различные управляемые параметры (например, вектор силы торца долота, вектор давления торца долота, вектор положения торца долота, величину вектора силы, величину вектора давления, величину сдвига положения, эксцентричное расстояние и т.д.), которые эквивалентны упомянутым выше управляемым параметрам, углу положения торца долота и степени (или пропорции) отклонения.
[0042] В одном или нескольких вариантах осуществления вычислитель (222) параметров бурения также выполнен с возможностью определения во время операции бурения постоянных интервалов глубин на основании скорости бурения. Постоянные интервалы глубин представляют собой временные интервалы, на которых буровое долото продвигается вперед на постоянную глубину в продолжение каждого из интервалов. В одном или нескольких вариантах осуществления скважинное устройство для направленного бурения настраивают для периодического регулирования траектории бурения на основании этих постоянных интервалов глубин. Например, скважинное устройство для направленного бурения может включать в себя пропорциональный контроллер, пропорциональный интегральный контроллер или пропорциональный интегральный дифференциальный контроллер, который регулируют один раз на каждом из постоянных интервалов глубин. Иначе говоря, контроллеры, используемые для регулирования траектории скважинного инструмента направленного бурения, включают в себя, но без ограничения ими, пропорциональный контроллер, пропорциональный интегральный контроллер или пропорциональный интегральный дифференциальный контроллер. Для этих контроллеров требуются определенные коэффициенты усиления, такие как пропорциональный коэффициент усиления, интегральный коэффициент усиления, дифференциальный коэффициент усиления и т.д. Эти коэффициенты усиления можно регулировать (например, повышать или понижать) на основании скорости бурения, вычисляемой в скважине.
[0043] В одном или нескольких вариантах осуществления вычислитель (222) параметров бурения также выполнен с возможностью определения во время операции бурения, сколь часто сохраняются в репозитории (210) выходные данные скважинного прибора построения изображения и/или сколь часто пересылаются выходные данные скважинного прибора построения изображения к наземному блоку (334) через посредство телеметрии по гидроимпульсному каналу связи. Например, когда скорость бурения низкая, изображения могут реже сохраняться в скважине или передаваться на поверхность для экономии ограниченной емкости скважинного запоминающего устройства и вследствие ограниченной полосы пропускания телеметрии по гидроимпульсному каналу связи.
[0044] Дополнительный примеры вычисления скорости бурения и других параметров бурения описываются ниже с обращением к фиг. 4.1-4.6.
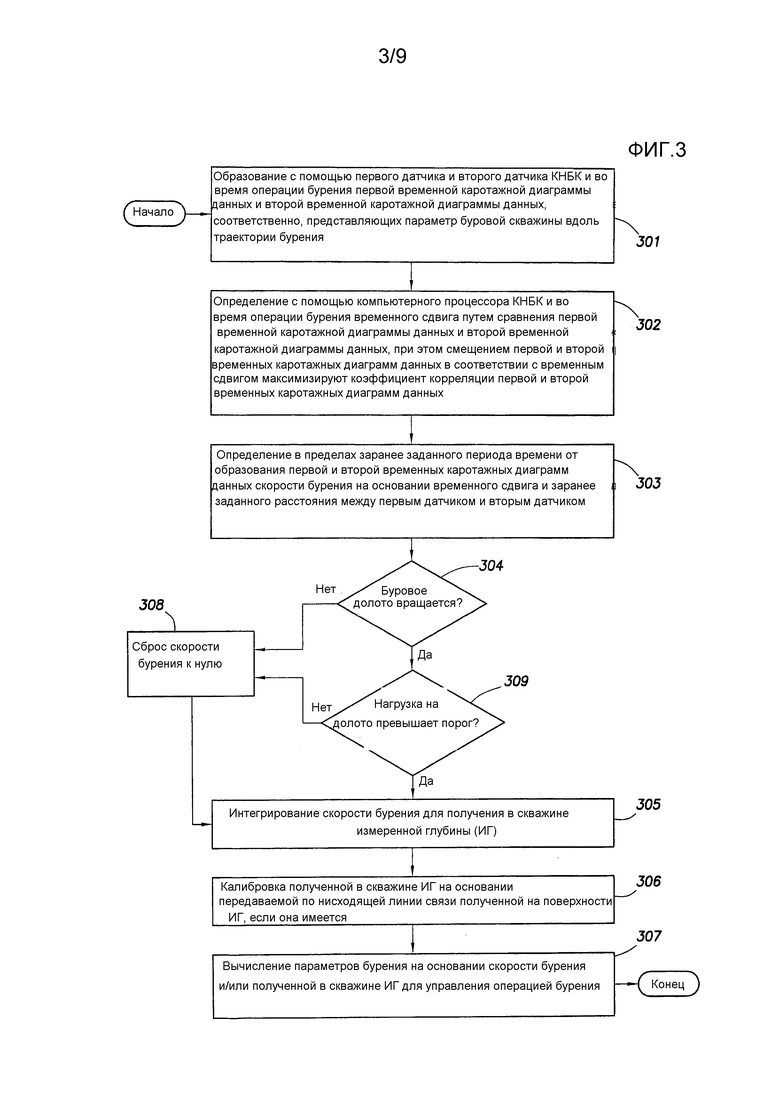
[0045] На фиг. 3 показан пример способа вычисления скорости и глубины бурения для скважинных инструментов согласно одному или нескольким вариантам осуществления. Например, способ, показанный на фиг. 3, можно применять на практике при использовании прибора (200) для вычисления скорости и глубины бурения, описанного выше с обращением к фиг. 1 и 2. В одном или нескольких вариантах осуществления один или несколько элементов, показанных на фиг. 3, можно опускать, повторять и/или выполнять в ином порядке. В соответствии с этим варианты осуществления вычисления скорости и глубины бурения для скважинных инструментов не должны считаться ограниченными конкретными компоновками элементов, показанными на фиг. 3.
[0046] Сначала во время операции бурения согласно блоку 301 образуют первую временную каротажную диаграмму данных и вторую временную каротажную диаграмму данных с помощью первого датчика и второго датчика, соответственно. В частности первый и второй датчики располагают в компоновке низа бурильной колонны (КНБК) и разносят на известное расстояние. В одном или нескольких вариантах осуществления первый датчик и второй датчик являются однотипными, так что первая и вторая временные каротажные диаграммы данных представляют скважинные параметры вдоль траектории бурения. Например, первый и второй датчики могут быть нейтронным датчиком изображения и акустическим датчиком изображения, соответственно, при этом нейтронное изображение и акустическое изображение содержат информацию относительно диаметра буровой скважины вдоль траектории бурения.
[0047] Согласно блоку 302 временной сдвиг определяют путем сравнения первой временной каротажной диаграммы данных и второй временной каротажной диаграммы данных. В одном или нескольких вариантах осуществления временной сдвиг определяют с помощью компьютерного процессора компоновки низа бурильной колонны и определяют во время операции бурения. В одном или нескольких вариантах осуществления временной сдвиг определяют перемещением первой и второй временных каротажных диаграмм данных до момента, когда временной сдвиг максимизирует коэффициент корреляции первой и второй временных каротажных диаграмм данных. Например, если первый и второй датчики могут обнаруживать особенности профиля диаметра буровой скважины, временной сдвиг определяют путем сдвига (то есть, смещения) шкалы времени первой временной каротажной диаграммы данных относительно шкалы времени второй временной каротажной диаграммы данных до согласования соответствующих пиков, представляющих выступ поверхности буровой скважины. Дополнительные примеры временного сдвига описываются ниже с обращением к фиг. 4.1-4.6.
[0048] Согласно блоку 303 скорость бурения определяют на основании временного сдвига и известного (то есть, заранее заданного) расстояния между первым датчиком и вторым датчиком. В одном или нескольких вариантах осуществления скорость бурения определяют с помощью компьютерного процессора компоновки низа бурильной колонны во время операции бурения и называют вычисленной в скважине скоростью бурения или полученной в скважине скоростью бурения. Например, скорость бурения можно вычислять делением известного расстояния между датчиками на временной сдвиг. Она представляет собой среднюю скорость проходки, которую усредняют на протяжении периода времени, в течение которого буровое долото продвигается на расстояние, равное расстоянию между датчиками. В одном или нескольких вариантах осуществления скорость бурения определяют в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных. Поскольку скорость бурения вычисляет компьютерный процессор компоновки низа бурильной колонны и не вносится никакая временная задержка при передаче каротажных диаграмм данных на поверхность, заранее заданный период времени может быть коротким периодом времени, таким как секунда, минута или любой период времени, значительно более короткий, чем задержка при передаче на поверхность при использовании телеметрии по гидроимпульсному каналу связи. В этой связи вычисленную скорость бурения называют почти текущей скоростью. Дополнительные подробности относительно вычисления скорости бурения описываются ниже с обращением к фиг. 4.1-4.6 и уравнениям 1-8.
[0049] Согласно блокам 304 и 309 определяют, вращается ли буровое долото или не превышает ли нагрузка на долото заранее заданный порог. Например, чтобы определить это, можно использовать скважинный датчик нагрузки на долото (НД) и датчик обнаружения вращения бурильной колонны (такой как гироскоп, акселерометры и магнитометры). В одном или нескольких вариантах осуществления отслеживание глубины прекращают, когда действие долота в забое скважины прекращается (нагрузка на долото очень небольшая или нулевая) и/или когда буровое долото не вращается. Иначе говоря, если согласно блоку 304 или блоку 309 следует ответ «нет», в способе переходят к блоку 308, согласно которому скорость бурения сбрасывают до нулевой перед продолжением способа согласно блоку 305; если же согласно блокам 304 и 309 следует ответ «да», в способе переходят непосредственно к блоку 305, согласно которому скорость бурения математически интегрируют на протяжении периода времени, чтобы определить расстояние, на которое долото внедрилось в породу. В качестве варианта, если компоновка низа бурильной колонны не содержит вблизи долота датчика нагрузки на долото, можно использовать только датчик обнаружения вращения. Кроме того, датчики вибрации и ударов можно альтернативно использовать для обнаружения состояния бурения и состояния отсутствия бурения. Например, если уровень вибрации меньше, чем заранее заданный порог, то скорость бурения можно сбросить до нулевой или до некоторого заранее заданного уровня, который по существу равен нулю. В одном или нескольких вариантах осуществления этот признак отсутствия бурения можно использовать для предотвращения накопления в приборе погрешностей отслеживания глубины, сужения полосы пропускания скважинной связи, снижения коэффициента загрузки запоминающего устройства и вычислительных ресурсов и/или передачи этих дорогих ресурсов другим элементам. В соответствии с этим глубину (называемую полученной в скважине измеренной глубиной (ИГ)) определяют на основании известной начальной глубины и вычисленного расстояния, на которое буровое долото внедрилось в породу. Например, начальная глубина может быть основана на переданной по нисходящей линии связи полученной на поверхности измеренной глубине (например, переданной с использованием телеметрии по гидроимпульсному каналу связи) к компьютерному процессору компоновки низа бурильной колонны.
[0050] Со временем погрешности полученной в скважине измеренной глубины могут накапливаться вследствие неточностей при определении временного сдвига и интегрировании вычисленной скорости бурения. Согласно блоку 306 полученную в скважине измеренную глубину периодически калибруют (то есть, корректируют) на основании полученной на поверхности измеренной глубины. В одном или нескольких вариантах осуществления полученную на поверхности измеренную глубину периодически (например, один раз в час) передают по нисходящей линии связи и сравнивают с полученной в скважине измеренной глубиной. В таком случае любое различие между полученной на поверхности измеренной глубиной и полученной в скважине измеренной глубиной можно анализировать, чтобы определять погрешность, которую используют для коррекции полученной в скважине измеренной глубины. Вследствие ограниченной полосы пропускания нисходящей линии связи (например, с использованием телеметрии по гидроимпульсному каналу связи) полученная на поверхности измеренная глубина доступна намного реже, чем полученная в скважине измеренная глубина. Иначе говоря, передача полученной на поверхности измеренной глубины по нисходящему каналу связи происходит намного реже, чем вычисление почти текущей скорости бурения и интегрирование ее для определения полученной в скважине измеренной глубины.
[0051] В одном или нескольких вариантах осуществления блоки 305 и 306 могут быть исключены, при этом регулирование скважинного инструмента будет осуществляться на основании скорости бурения без вычисления параметра глубины. В таких вариантах осуществления после блока 308 или 309 можно переходить непосредственно к блоку 307, описанному ниже.
[0052] Согласно блоку 307 дополнительные параметры бурения вычисляют на основании по меньшей мере скорости бурения и полученной в скважине измеренной глубины. Например, параметры бурения могут включать в себя скорость повышения кривизны ствола скважины, скорость поворота, резкое искривление ствола скважины, эффективный гравитационный угол положения торца долота и т.д., которые можно вычислять по скорости бурения и/или по полученной в скважине измеренной глубине при использовании формул, известных специалистам в соответствующей области техники. Кроме того, в этих формулах могут использоваться другие параметры (например, наклон компоновки низа бурильной колонны, азимут, магнитное склонение, магнитный угол положения торца долота, гравитационный угол положения торца долота, полное магнитное поле, полное гравитационное поле и т.д.), измеряемые с использованием других скважинных приборов компоновки низа бурильной колонны. В одном или нескольких вариантах осуществления операцию бурения регулируют на основании скорости бурения скважины и/или других вычисленных параметров бурения. Например, угол положения торца долота и/или степень отклонения можно регулировать в реальном времени на основании по меньшей мере одного из этих параметров бурения. В другом примере постоянные интервалы глубин могут определяться на основании скорости бурения скважины. Постоянные интервалы глубин представляют собой временные интервалы, на которых буровое долото продвигается на постоянную глубину в продолжение каждого из интервалов. В одном или нескольких вариантах осуществления скважинное устройство для направленного бурения настраивают для периодического регулирования траектории бурения на основании этих постоянных интервалов глубин. Например, скважинное устройство для направленного бурения может включать в себя пропорциональный контроллер, пропорциональный интегральный контроллер или пропорциональный интегральный дифференциальный контроллер, который регулируют один раз на каждом из постоянных интервалов глубин. В еще одном примере скорость бурения скважины можно использовать для определения во время операции бурения, сколь часто сохраняются в скважинном запоминающем устройстве выходные данные скважинного прибора построения изображений и/или сколь часто выходные данные скважинного прибора построения изображений передаются на поверхность к наземному блоку через посредство телеметрии по гидроимпульсному каналу связи. Например, когда скорость бурения низкая, изображения могут реже сохраняться в скважине или передаваться на поверхность для экономии ограниченной емкости скважинного запоминающего устройства и вследствие ограниченной полосы пропускания телеметрии по гидроимпульсному каналу связи.
[0053] Дополнительные подробности относительно вычисления параметров бурения для управления операцией бурения описаны ниже с обращением к фиг. 4.1-4.6 и уравнениям 9-16.
[0054] На фиг. 4.1-4.11 показаны примеры вычисления скорости и глубины бурения для скважинных инструментов согласно одному или нескольким вариантам осуществления. Например, примеры, показанные на фиг. 4.1-4.11, на практике можно получать при использовании прибора (200) для вычисления скорости и глубины бурения, описанного выше с обращением к фиг. 1 и 2.
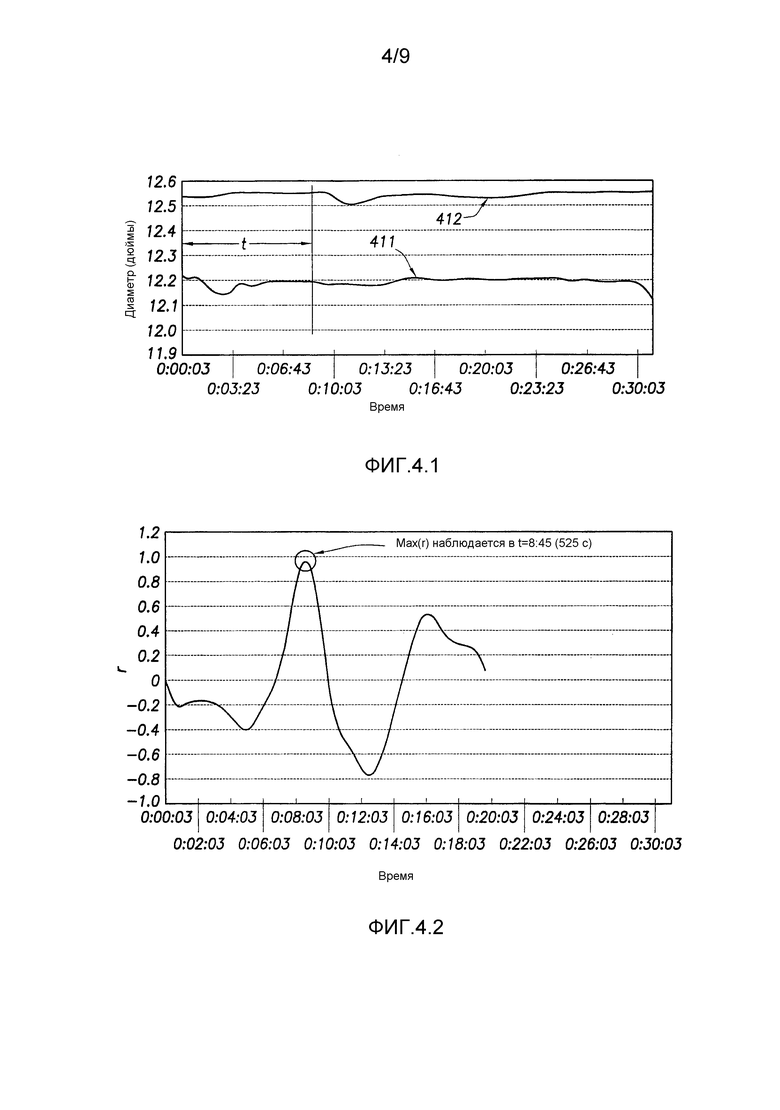
[0055] На фиг. 4.1 показаны данные скважинных каверномеров, измеренные на двух различных местах в одной и той же компоновке низа бурильной колонны. В частности информация (411) о диаметре буровой скважины получена из временной каротажной диаграммы данных, основанной на данных каверномера роторной управляемой системы (данных механического каверномера вблизи долота) и данных акустического каверномера, полученных при использовании прибора с плотностным нейтронным каверномером (ПНК). В частности, информация (411) о диаметре буровой скважины основана на данных механического каверномера вблизи долота из роторной управляемой системы, показывающих уменьшение диаметра буровой скважины в момент времени 0:03:00 по горизонтальной шкале времени. В дополнение к этому информация (412) о диаметре буровой скважины представляет собой временную каротажную диаграмму данных прибора каротажа во время бурения с акустическим каверномером, показывающую уменьшение диаметра буровой скважины в момент времени 0:11:00 по той же горизонтальной шкале времени. Промежуток между моментами времени 0:03:00 и 0:11:00 по горизонтальной шкале времени обозначает временной сдвиг t. Датчик роторной управляемой системы и датчик каротажа во время бурения физически расположены в компоновке низа бурильной колонны на расстоянии d друг от друга. Специалисту в соответствующей области техники должно быть понятно, что, даже если информация (411) о диаметре буровой скважины и информация (412) о диаметре буровой скважины точно не согласуются, две каротажные диаграммы данных можно сдвинуть (сместить) относительно друг друга на время t для получения соответствия на основании формы провала, показывающей уменьшение диаметра буровой скважины. Например, поскольку буровая скважина могла быть дополнительно расширена или размыта потоком бурового раствора, обломками выбуренной породы и/или контактами со стабилизатором, показания каверномера вблизи долота из роторной управляемой системы (обычно получаемые на расстоянии приблизительно 2-3 фута (0,60-0,91 м) от бурового долота) обычно меньше показаний акустического каверномера или равны им (обычно получаемые на расстоянии приблизительно 50-100 футов (15,24-30,48 м) от бурового долота. Этот пример показывает, что датчики, находящиеся на известном расстоянии (d) друг от друга, не дают точно одинаковых показаний для получения корреляции между результирующими каротажными диаграммами данных. В механическом каверномере в роторной управляемой системе и акустическом каверномере при каротаже во время бурения используются принципиально разные физические явления/конструктивные элементы для измерения подобных величин. Поэтому датчики определяются не как датчики одного вида, а как подобного вида. Другие датчики подобных видов включают в себя счетчики гамма-излучения, измерители наклона, азимута, температуры, пластового давления, каверномер, отклонитель, формирователь изображений при каротаже в процессе бурения и т.д.
[0056] В приведенном выше примере роторная управляемая система, приборы измерений в процессе бурения и каротажа во время бурения соединены через посредство общей шины связи в компоновке низа бурильной колонны. Шина связи может включать в себя электромагнитный короткий ретрансляционный участок в качестве частичного канала. В компоновке низа бурильной колонны можно использовать любую другую телеметрию с коротким ретрансляционным участком, включая акустическую связь с коротким ретрансляционным участком, связь с коротким ретрансляционным участком с использованием телеметрии по буровому раствору и т.д. Прибор (200) для вычисления скорости и глубины бурения из фигур 1 и 2 можно объединять с прибором роторной управляемой системы, объединять с прибором каротажа во время бурения или автономным прибором по шине связи. В другом случае прибор (200) для вычисления скорости и глубины бурения может быть ведущим устройством на шине, которое может поддерживать связь с приборами роторной управляемой системы и каротажа во время бурения через посредство шины связи. Кроме того, скорость бурения может вычисляться скважинным компьютером и передаваться через посредство телеметрии по проводу в бурильной трубе на поверхность. Затем скорость бурения скважины может использоваться для получения более точной, вычисленной на поверхности глубины (измеренной глубины). Хорошо известно, что бурильная труба может сжиматься и растягиваться и наземное измерение глубины может не быть точным без сравнения со скоростью бурения, вычисленной в скважине.
[0057] На фиг. 4.2 показано определение временного сдвига между двумя временными каротажными диаграммами данных, при котором корреляционная функция становится максимальной. В частности, на фиг. 4.2 показана корреляция r Пирсона между двумя наборами данных каверномера, показанными на фиг. 4.1, как функция смещения t по шкалам времени между двумя наборами данных каверномера. Как показано на фиг. 4.2, максимум корреляции r Пирсона между двумя наборами данных каверномера появляется, когда смещение равно 0:08:45 или 525 с, которое определяют как временной сдвиг, используемый в способе, показанном на фиг.3 выше.
[0058] Как известно специалистам в соответствующей области техники, корреляция между переменными отражает степень, с которой переменные связаны. Общей мерой корреляции является корреляция Пирсона по смешанным моментам или корреляция Пирсона, которая отражает степень линейной зависимости между двумя переменными. Она изменяется в пределах от +1 до -1. Корреляция +1 означает, что имеется точная положительная линейная зависимость между переменными. Уравнением 1 представлена формула для вычисления корреляции r Пирсона как функции текущего времени Т и временного сдвига t.
[0059] 

[0060] В уравнении 1 N является числом точек данных в каждой из каротажных диаграмм данных, X[] является массивом из временной каротажной диаграммы 1 данных, имеющим элементы массива, индексированные в соответствии с t=1…N по шкале времени каротажной диаграммы данных, Y[] является массивом из временной каротажной диаграммы 2 данных, имеющим элементы массива, индексированные в соответствии с t=1…N по шкале времени каротажной диаграммы данных. 

[0061] Временной сдвиг t, при котором корреляция r Пирсона становится максимальной, представлен в уравнении 2.
t=argmaxt→N(rT). (Уравнение 2)
[0062] Уравнения 3-6 представляют собой упрощенные формулы для оценивания временного сдвига t, при котором оптимизируются (например, становятся максимальными) различные упрощенные корреляционные функции между двумя каротажными диаграммами данных.

[0063] Поскольку для вычисления корреляции Пирсона с использованием уравнений 1-3 требуются вычислительные ресурсы, обычно не имеющиеся в скважине, нижеследующие упрощенные уравнения регрессии используют для нахождения наилучшего соответствия между двумя каротажными диаграммами данных группы датчиков с учетом ограниченного вычислительного ресурса скважинного компьютера.

[0064] 
[0065] где abs() является оператором абсолютного значения:

[0066] Эти упрощенные формулы могут использоваться в приборе (200) для вычисления скорости и глубины бурения из фиг. 2 или в блоке 302 способа из фиг. 3, изложенного выше. После определения временного сдвига t почти текущую скорость проходки (ROP) в заданный момент Т времени можно оценить на основании средней скорости бурения, вычисленной с использованием уравнения 7, приведенного ниже, где d и t расстояние между датчиками и временной сдвиг, рассмотренные выше.
ROP[T]=d/t. (Уравнение 7)
[0067] Соответственно, перемещение Disp в заданный момент Т времени можно оценить путем математического суммирования дискретных значений ROP при использовании уравнения 8, приведенного ниже, где t является временным индексом по шкале времени каротажной диаграммы данных. Специалистам в соответствующей области техники должно быть понятно, что, когда число точек данных в каротажной диаграмме данных возрастает до большого количества, дискретным суммированием аппроксимируется математический интеграл.
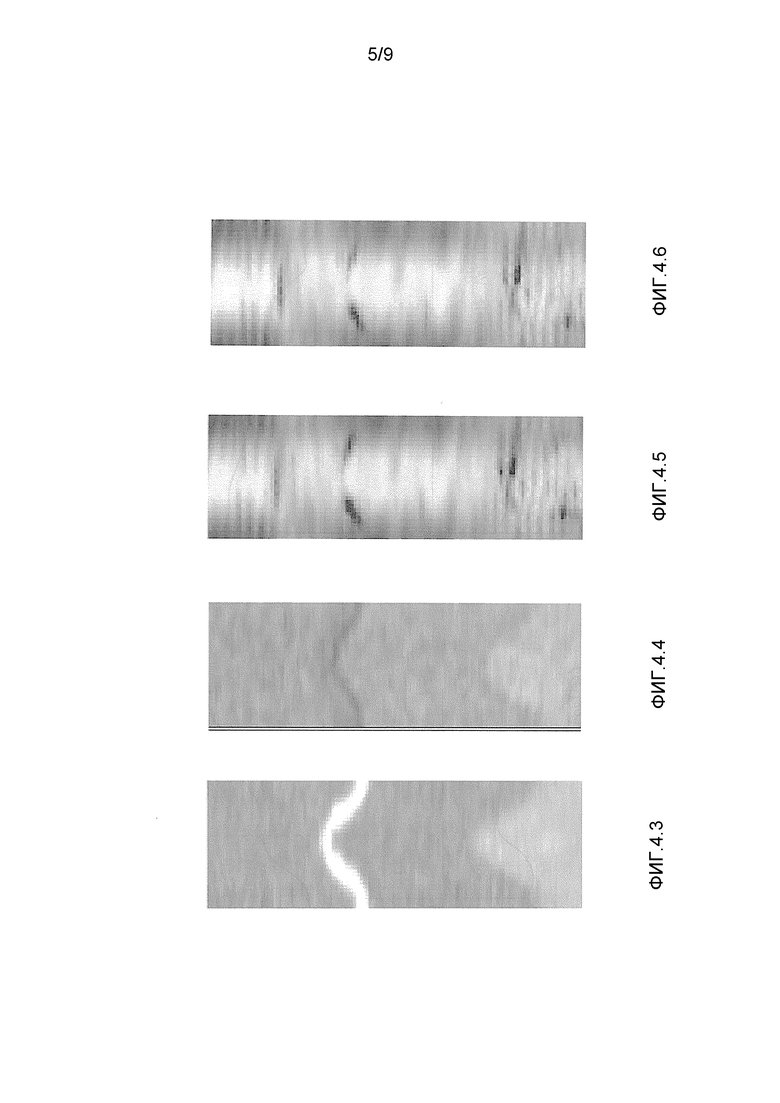
[0068] На фигурах 4.3-4.4 показаны каротажные изображения, представляющие плотностной гамма-гамма каротаж (объемной плотности) и разреза фотоэлектрической (ФЭ) абсорбции, соответственно. На фиг. 4.5-4.6 показаны полученные на расстоянии изображения при использовании резервных акустических датчиков в одной и той же компоновке низа бурильной колонны. Датчики, образующие эти каротажные изображения, расположены с известным разнесением и создают почти идентичные двумерные изображения. В этом примере каждое двумерное изображение представляет собой набор 32 каротажных диаграмм одномерных данных, соответствующих 32 азимутальным углам в буровой скважине. Специалистам в соответствующей области техники должно быть понятно, что уравнения 1-6, приведенные выше, применимы к каротажной диаграмме многомерных данных с учетом X[] и Y[] в качестве многомерных массивов. Кроме того, данные датчика каротажа во время бурения (или другого датчика оценивания пласта) и данные датчика измерений в процессе бурения (или другого навигационного датчика) можно обрабатывать одновременно, чтобы повышать достоверность и точность вычисления скорости и/или глубины бурения.
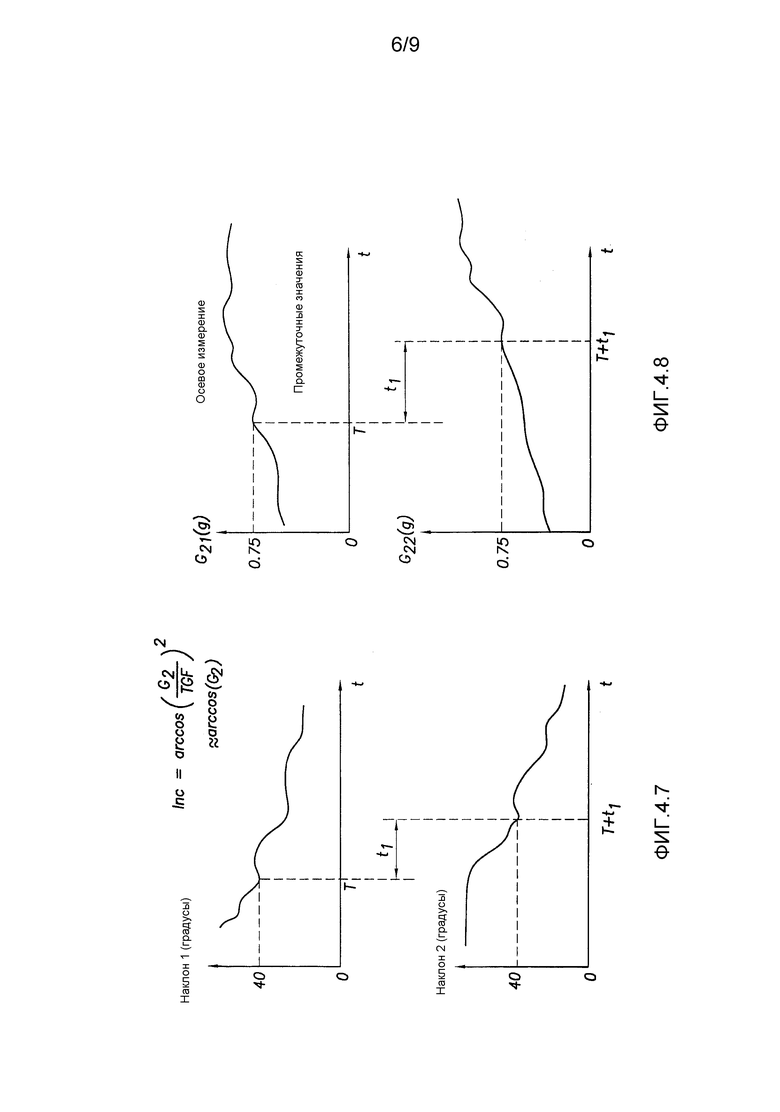
[0069] На фиг. 4.7 показаны данные о наклоне, измеренные на двух различных местах в одной и той же компоновке низа бурильной колонны при использовании датчика роторной управляемой системы и (навигационного) датчика измерений в процессе бурения, которые физически расположены в компоновке низа бурильной колонны с разнесением на расстояние d. Специалисту в соответствующей области техники должно быть понятно, что, даже если первая информация о наклоне (Наклон 1) и вторая информация о наклоне (Наклон 2) точно не соответствуют, две каротажные диаграммы данных можно сдвинуть (сместить) на время t1 для достижения соответствия на основании неравномерного изменения наклона. В данном случае по оси X отложено время или дискретный временной индекс и по оси Y отложен наклон в градусах.
[0070] На фиг. 4.8 показаны данные осевых акселерометров, измеренные на двух различных местах в одной и той же компоновке низа бурильной колонны при использовании датчика роторной управляемой системы и (навигационного) датчика измерений в процессе бурения, которые физически расположены в компоновке низа бурильной колонны с разнесением на расстояние d. Данные осевых акселерометров можно считать промежуточным значением для вычисления наклона буровой скважины и тесно связанными с изменением наклона. Специалисту в соответствующей области техники должно быть понятно, что, даже если информация (Gz1) осевого акселерометра и информация (Gz2) осевого акселерометра точно не соответствуют, две каротажные диаграммы данных можно сдвинуть (сместить) на время t1 для достижения соответствия на основании неравномерного изменения данных осевых акселерометров. В данном случае по оси X отложено время или дискретный временной индекс и по оси Y отложено ускорение в единицах G, где 1G=9,8 м/с2.
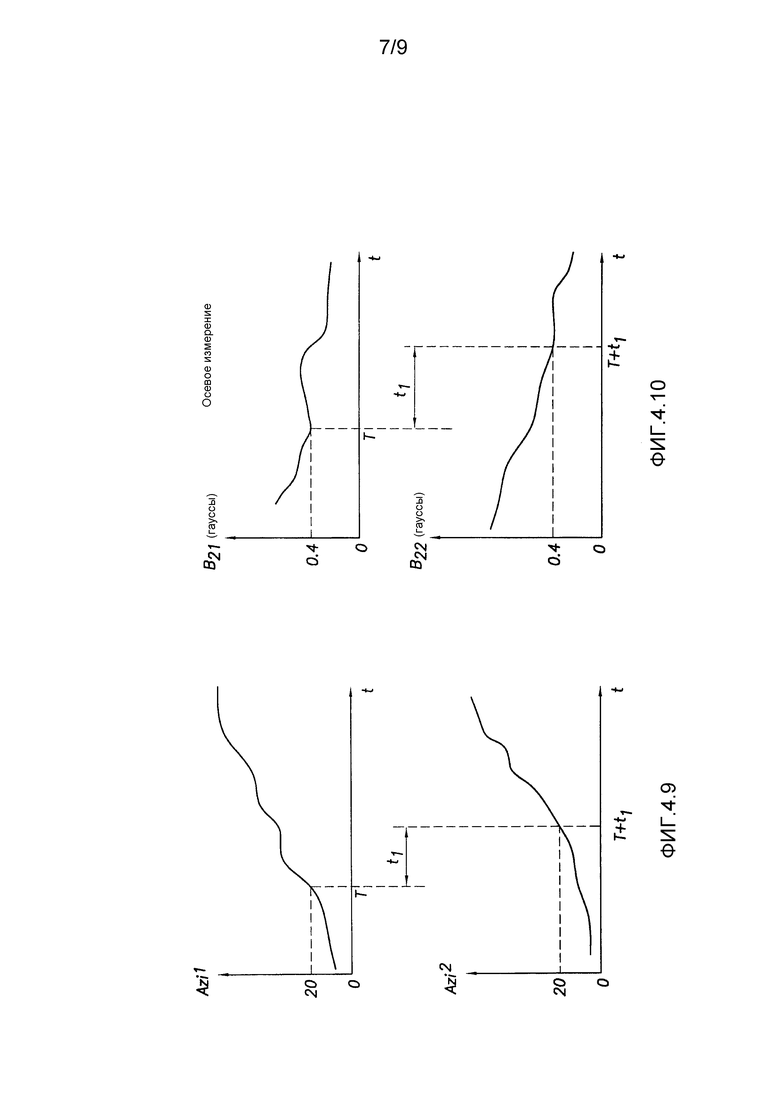
[0071] На фиг. 4.9 показаны азимутальные данные, измеренные на двух различных местах в одной и той же компоновке низа бурильной колонны при использовании датчика роторной управляемой системы и (навигационного) датчика измерений в процессе бурения, которые физически расположены в компоновке низа бурильной колонны с разнесением на расстояние d. Специалисту в соответствующей области техники должно быть понятно, что, даже если первая информация (Азимут 1) об азимуте буровой скважины и вторая информация (Азимут 2) об азимуте буровой скважины точно не соответствуют, две каротажные диаграммы данных можно сдвинуть (сместить) на время t1 для достижения соответствия на основании неравномерного изменения данных азимута. В данном случае по оси X отложено время или дискретный временной индекс и по оси Y отложен азимут в градусах.
[0072] На фиг. 4.10 показаны данные осевых магнитометров, измеренные на двух различных местах в одной и той же компоновке низа бурильной колонны при использовании датчика роторной управляемой системы и (навигационного) датчика измерений в процессе бурения, которые физически расположены в компоновке низа бурильной колонны с разнесением на расстояние d. Данные осевых магнитометров можно считать промежуточным значением для вычисления азимута буровой скважины и тесно связанными с изменением наклона и азимута. Специалисту в соответствующей области техники должно быть понятно, что, даже если информация (Bz1) осевого магнитометра и информация (Bz2) осевого магнитометра точно не соответствуют, две каротажные диаграммы данных можно сдвинуть (сместить) на время t1 для достижения соответствия на основании неравномерного изменения показаний осевых магнитометров. В данном случае по оси X отложено время или дискретный временной индекс и по оси Y отложена напряженность магнитного поля в гауссах.
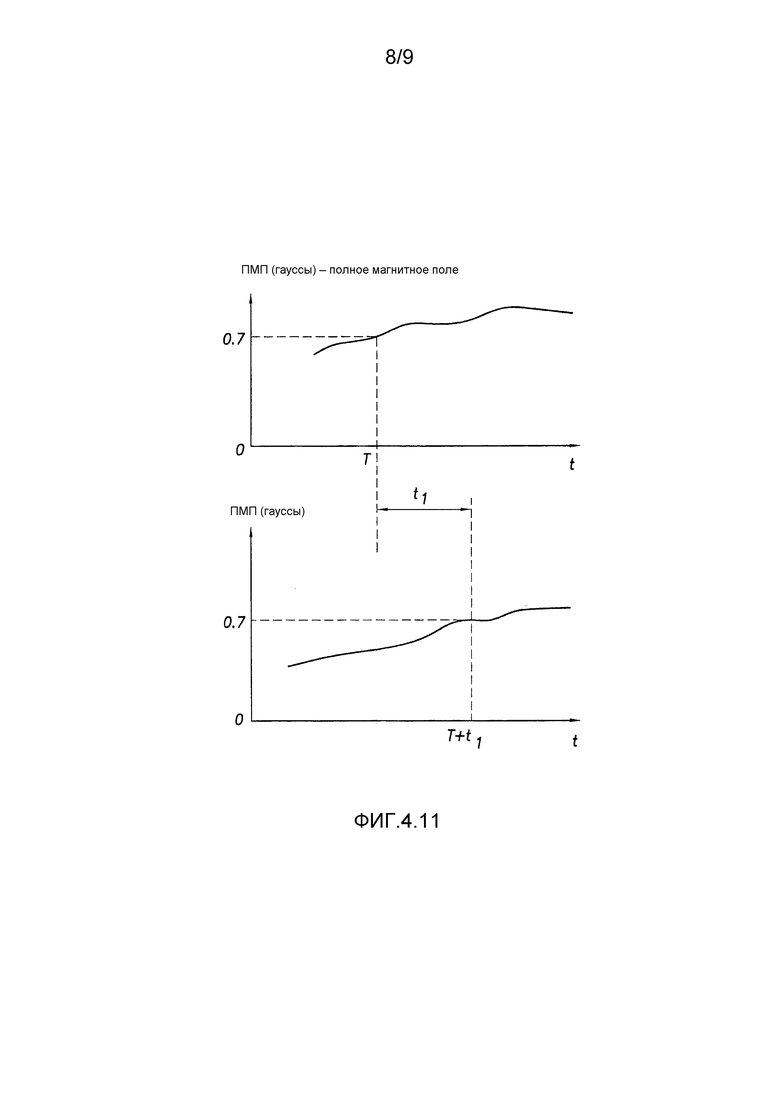
[0073] На фиг. 4.11 показаны данные о полном магнитном поле (ПМП), измеренные на двух различных местах в одной и той же компоновке низа бурильной колонны в случае, когда имеется влияние магнитного поля (например, от находящейся вблизи обсадной колонны и т.д.), при использовании датчика роторной управляемой системы и (навигационного) датчика измерений в процессе бурения, которые физически расположены в компоновке низа бурильной колонны с разнесением на расстояние d. Специалисту в соответствующей области техники должно быть понятно, что, даже если информация о магнитном поле в буровой скважине в двух каротажных диаграммах данных точно не соответствует одна другой, две каротажные диаграммы данных можно сдвинуть (сместить) на время t1 для достижения соответствия на основании неравномерной формы полного магнитного поля. В данном случае по оси X отложено время или дискретный временной индекс и по оси Y отложена напряженность магнитного поля в гауссах.
[0074] Как показано в примерных сценариях, приведенных выше, в приборе (200) для вычисления скорости и глубины бурения из фиг. 2 или способе из фиг. 3 используются данные наборов датчиков, имеющихся в компоновке низа бурильной колонны (например, данные механического каверномера роторной управляемой системы в сопоставлении с акустическими дистанционными данными каротажа во время бурения, [азимутальные] гамма-данные из роторной управляемой системы в сопоставлении с [азимутальными] гамма-данными каротажа во время бурения и измерениями в процессе бурения, данные исследований из роторной управляемой системы в сопоставлении с данными исследований при измерениях в процессе бурения и т.д.) и не нужны никакие дополнительные наборы специализированных датчиков и/или специализированные механические компоненты (намагничивающие устройства и/или счетчики). При корректировке скважинного программного обеспечения переводник для каротажа в процессе бурения может иметь двойное назначение, а именно, (1) датчика изображения при каротаже во время бурения и (2) специализированного вычислителя скорости проходки.
[0075] После получения в приведенном выше примере скорости проходки скважины пропорциональный коэффициент усиления автоматизированной системы регулирования траектории роторной управляемой системы можно скорректировать на основании скорости бурения. Кроме того, в результате объединения вычисленной глубины с данными исследований в роторной управляемой системе (наклона и азимута вблизи долота) компьютер роторной управляемой системы может вычислить в скважине точное положение скважины. Кроме того, скорость каротажа и скорость телеметрии (частоты обновления данных) можно изменять в зависимости от вычисленной скорости проходки. В целом, как показано в примерах, приведенных ниже, при известности скорости проходки скважины можно повысить качество скважинной управляющей автоматики (например, используемой в роторных управляемых системах).
ВЫЧИСЛЕННАЯ В СКВАЖИНЕ ГЛУБИНА
[0076] Глубину (бурильной колонны или измеренную глубину, обозначаемую как «Глубина») в заданный момент Т времени можно обновлять при использовании перемещения в заданный момент Т времени, показанного в уравнении 9 и называемого вычисленной в скважине глубиной или полученной в скважине измеренной глубиной.
Глубина [Т]=Глубина [Т-1]+Перемещение [Т].
(уравнение 9)
[0077] Кроме того, чтобы исключать накопление погрешности, полученную в скважине измеренную глубину можно периодически синхронизировать (обновлять) с полученной на поверхности измеренной глубиной. Эту синхронизацию можно осуществлять, например, путем периодической передачи по нисходящему каналу связи измеренной глубины к скважинному прибору (например, каждый час, или через каждые 200 футов (60,96 м) и т.д.). Кроме того, основанный на корреляции способ вычисления скорости проходки и глубины можно сочетать с другими известными способами, такими как способы, основанные на скважинных счетчиках, или на основе акселерометров и т.п.
ИССЛЕДОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ В ТЕЧЕНИЕ ОПЕРАЦИИ БУРЕНИЯ
[0078] Одно эффективное применение измеренной в скважине глубины заключается в определении в реальном времени скорости поворота и скорости повышения кривизны ствола скважины для системы направленного наклонного бурения скважины. Это особенно полезно, если скважинный прибор непрерывно регулирует угол положения торца долота и степень отклонения для получения заданной характеристики направленного наклонного бурения, определяемой скоростью повышения кривизны ствола скважины, скоростью поворота, резким искривлением ствола скважины и эффективным гравитационным углом положения торца долота, которые можно вычислить при использовании уравнений 10-14, приведенных ниже, в которых D является промежуточным значением при вычислении резкого искривления ствола скважины.
Скорость повышения кривизны ствола скважины = (Наклон[Т]-Наклон[Т-t])/(Глубина[Т]-Глубина[Т-t]), (Уравнение 10)
Скорость поворота = (Азимут[Т]-Азимут[Т-t]/(Глубина[Т]-Глубина[Т-t]), (Уравнение 11)
D=arccos[cos(Азимут[Т]-Азимут[Т-t])sin(Наклон[Т-t])sin(Наклон[Т])+cos(Наклон[Т]cos(Наклон[Т-t])], (Уравнение 12)
Резкое искривление ствола скважины = D/(Глубина[Т]-Глубина[Т-t]), (Уравнение 13)
Гравитационный угол положения торца долота = arccos[(cos(D)cos(Наклон[Т-t])-cos(Наклон[Т]))/sin(Наклон[Т-t])sin(D)], 
или








где:

[0079] В этих эквивалентных уравнениях «Наклон 1» является наклоном скважины на первой измеренной глубине (ИГ1), «Наклон 2» является наклоном скважины на второй измеренной глубине (ИГ2), «Азимут 1» является наклоном скважины на первой измеренной глубине и «Азимут 2» является наклоном скважине на второй измеренной глубине, Gx1, Gy1 и Gz1 являются показаниями акселерометра по оси x, y и z, соответственно, на первой измеренной глубине, Gx2, Gy2 и Gz2 являются показаниями акселерометра по оси x, y и z, соответственно, на второй измеренной глубине, Bx1, By1 и Bz1 являются показаниями магнитометра по оси x, y и z, соответственно, на первой измеренной глубине, Bx1, By2 и Bz2 являются показаниями магнитометра по оси x, y и z, соответственно, на второй измеренной глубине. Например, первая измеренная глубина и вторая измеренная глубина могут соответствовать двум местам нахождения датчиков в любой конкретный момент времени в течение операции бурения.
[0080] Обычно три магнитометра и три акселерометра используют для измерения трех составляющих гравитационного вектора и вектора магнитного поля земли в течение кадра датчиков. Выходные напряжения акселерометров обозначаются Gx, Gy и Gz в соответствии с тремя ортогональными осями. Точно так же выходными сигналами магнитометра являются Bx, By и Bz. В частности, ось z направлена вниз по оси долота, а ось y определяется как находящаяся на одной линии с торцом долота.
[0081] Скорость повышения кривизны ствола скважины и скорость поворота можно вычислять по данным временной области при использовании эквивалентных уравнений, основанных на данных на первой измеренной глубине и второй измеренной глубине.
[0082] Чтобы выполнить задачу направленного наклонного бурения, оператору необходимо знать ориентацию изогнутой секции (то есть, роторной управляемой компоновки низа бурильной колонны). Зависимость между направленным датчиком и изогнутой секцией является постоянной для каждой компоновки низа бурильной колонны. Угол положения инструментальной поверхности направленного датчика известен из измерения направленным датчиком. Если выполняют измерение угловой разности между опорной точкой направленного датчика и изогнутой секцией, оператор может использовать это измерение и отсчет угла положения инструментальной поверхности направленного датчика для определения ориентации изогнутой секции.
РЕГУЛИРОВАНИЕ УСИЛЕНИЯ ЗАМКНУТОГО КОНТУРА
[0083] Общеизвестная проблема при автоматизированном направлении скважинного управляемого устройства (например, роторной управляемой системы) заключается в том, что для скважинного компьютера обычно неизвестна скорость бурения. В результате регулировка пропорционального контроллера (например, коэффициента усиления) не осуществляется надлежащим образом. Если скважинный компьютер способен вычислять (или задавать) текущую скорость бурения (например, скорость проходки), то он может эффективно регулировать коэффициент усиления пропорционального контроллера, используемого при реализации алгоритма поддержания наклона и/или азимута. При поддержании наклона и/или азимута скорость повышения кривизны ствола скважины и скорость поворота вычисляются в соответствии с уравнениями 15 и 16, приведенными ниже.
Скорость повышения кривизны ствола скважины = Kbr∗ROP∗(ΔInc)+Тенденция к понижению кривизны ствола скважины.
(уравнение 15)
Скорость поворота = Ktr∗ROP∗(ΔAzi)+Тенденция к отклонению от заданного направления (Уравнение 16)
[0084] В уравнениях 15 и 16 Kbr является пропорциональным коэффициентом усиления контроллера, предназначенного для регулирования скорости повышения кривизны ствола скважины, Ktr является пропорциональным коэффициентом усиления контроллера, предназначенного для регулирования скорости поворота, ROP является вычисленной в скважине скоростью бурения, ΔInc является разностью между заданным наклоном и фактическим наклоном, ΔAzi является разностью между заданным азимутом и фактическим азимутом, тенденция к понижению кривизны ствола скважины представляет собой тенденцию к понижению наклона долота/компоновки низа бурильной колонны и тенденция к отклонению от заданного направления представляет собой тенденцию к отклонению от заданного направления долота/компоновки низа бурильной колонны, все эти термины понятны специалисту в соответствующей области техники. Хотя в приведенном выше примере регулируются только пропорциональные коэффициенты усиления, специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, должно быть понятно, что та же самая концепция равным образом применима для интегральных коэффициентов усиления, дифференциальных коэффициентов усиления и т.д. Эти уравнения используются, когда регулирование управляемого инструмента производится на фиксированном временном интервале и на этом фиксированном временном интервале коэффициент усиления регулируется на основании скорости бурения. В качестве варианта регулирование управляемого инструмента может производиться на фиксированном интервале глубин без значительного изменения коэффициентов усиления контроллера (контроллеров) на основании скорости бурения.
[0085] На основании скорости повышения кривизны ствола скважины и скорости поворота, вычисленных выше, при использовании нижеследующих уравнений можно вычислить заданный угол положения торца долота и степень (пропорцию) отклонения. Для наглядности и простоты тенденция к понижению кривизны ствола скважины и тенденция к отклонению от заданного направления предполагаются нулевыми.
Скорость повышения кривизны ствола =Kbr∗ROP∗(ΔInc),
Скорость поворота =Ktr∗ROP∗(ΔAzi),
Заданный угол положения торца долота =arctan 2 (Скорость повышения кривизны ствола скважины, Скорость поворота),
Заданная пропорция =
=
где:
ΔInc = Заданный наклон - Фактический наклон,
ΔAzi = Заданный азимут - Фактический азимут.
[0086] В соответствии с этим, чтобы регулировать направление траектории бурения, желательный угол положения торца долота и пропорцию задают для управляемого инструмента. При наличии заданной скорости бурения роторная управляемая система способна точно регулировать траекторию. Специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, должно быть понятно, что приведенные выше уравнения и схема регулирования равным образом применимы для вертикального бурения, изменения направления ствола скважины по магнитным измерениям, бурения с постоянной кривизной (с постоянной скоростью повышения кривизны и/или с постоянной скоростью поворота) и схем автоматизированного бурения тангенциальных и горизонтальных скважин.
ИНТЕРВАЛ РЕГИСТРАЦИИ ПРИ КАРОТАЖЕ ВО ВРЕМЯ БУРЕНИЯ
[0087] Для современного прибора построения изображений при каротаже во время бурения требуется скважинное запоминающее устройство большой емкости с высокой плотностью записи, чтобы после выполнения бурения иметь возможность формировать высококачественные каротажные изображения, относящиеся к этапу каротажа во время бурения (изображения, основанные на данных из запоминающего устройства). Однако при известности скорости бурения (скорости проходки) управляемым инструментом прибор построения изображений при каротаже во время бурения способен экономить ресурс запоминающего устройства и интеллектуально управлять использованием памяти. Например, если скорость бурения становится небольшой, прибор не записывает в запоминающее устройство данные об изображения столь часто, как при более высокой скорости бурения.
[0088] Аналогичный принцип применяется относительно использования полосы пропускания телеметрии по гидроимпульсному каналу связи. Когда скорость бурения становится очень низкой, данные об изображениях при каротаже во время бурения не посылаются часто, и полосу пропускания телеметрии можно отдавать другим приборам.
[0089] Согласно вариантам осуществления вычисление скорости и глубины бурения для скважинных инструментов может быть реализовано практически на компьютере любого типа независимо от используемой платформы. Например, как показано на фиг. 5, компьютерная система (500) включает в себя один или несколько процессоров (502), таких как центральный процессор (ЦП) или аппаратный процессор, ассоциативное запоминающее устройство (505) (например, оперативное запоминающее устройство (ОЗУ), кэш-память, флэш-память и т.д.), устройство (506) хранения данных (например, жесткий диск, оптический накопитель, такой как накопитель на компакт-дисках или накопитель на цифровых видеодисках (ЦВД), карта флэш-памяти и т.д.) и многочисленные другие элементы и функциональные компоненты (непоказанные), типичные для современных компьютеров. Кроме того, компьютер (500) может включать в себя средства ввода, такие как клавиатура (508), мышь (510) или микрофон (непоказанный). Компьютер (500) может также включать в себя средства вывода, такие как монитор (512) (например, жидкокристаллический дисплей (ЖКД), плазменный дисплей или монитор на электроннолучевой трубке (ЭЛТ)). Компьютерная система (500) может быть соединена с сетью (515) (например, с локальной сетью (ЛС), глобальной сетью (ГС), такой как Интернет, или любой другой сетью подобного вида) через посредство сетевого интерфейса (непоказанного). Специалистам в соответствующей области техники должно быть понятно, что существуют компьютерные системы многих других видов (например, рабочая станция, настольный компьютер, переносный компьютер, персональное устройство хранения данных, мобильное устройство, такое как сотовый телефон или персональный цифровой ассистент, или любая другая вычислительная система, способная выполнять считываемые компьютером инструкции), а упомянутые выше средства ввода и вывода могут иметь другие формы, известные в настоящее время или разрабатываемые. Вообще говоря, компьютерная система (500) включает в себя по меньшей мере средства минимальной обработки, ввода и/или вывода, необходимые для применения на практике одного или нескольких вариантов осуществления.
[0090] Кроме того, специалистам в соответствующей области техники должно быть понятно, что один или несколько элементов упомянутой выше компьютерной системы (500) могут быть расположены на удаленном месте и связаны с другими элементами по сети. Кроме того, один или несколько вариантов осуществления можно реализовать в распределенной системе, имеющей множество узлов, при этом каждая часть реализации может быть реализована в отдельном узле распределенной системы. В одном или нескольких вариантах осуществления узел соответствует компьютерной системе. В качестве варианта узел может соответствовать процессору с ассоциативным физическим запоминающим устройством. В качестве варианта узел может соответствовать процессору с совместно используемым запоминающим устройством и/или ресурсами. Кроме того, инструкции программного обеспечения по выполнению одного или нескольких вариантов осуществления могут сохраняться на считываемом компьютером носителе, таком как компакт-диск (КД), дискета, лента или любое другое считываемое компьютером устройство хранения данных.
[0091] Вычисление скорости и глубины бурения для скважинных инструментов было описано применительно к ограниченному количеству вариантов осуществления, при этом специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, должно быть понятно, что могут быть разработаны другие варианты осуществления без отступления от объема вычисления скорости и глубины бурения для скважинных инструментов, раскрытого в этой заявке. Например, уравнения, приведенные на протяжении этого раскрытия, можно решать при использовании программного обеспечения, аппаратно-программного обеспечения, вентильной матрицы, программируемой пользователем (ВМПП), аппаратного обеспечения (в том числе, например, аналоговых или цифровых схем) или сочетаний из них. В соответствии с этим объем вычисления скорости и глубины бурения для скважинных инструментов должен ограничиваться только прилагаемой формулой изобретения.
Изобретение относится к управлению процессом бурения. Техническим результатом является определение скорости и глубины бурения для скважинных инструментов. Способ управления операцией бурения включает в себя образование с помощью первого датчика и второго датчика компоновки низа бурильной колонны (КНБК) первой временной каротажной диаграммы данных и второй временной каротажной диаграммы данных, соответственно, представляющих параметр буровой скважины вдоль траектории бурения, определение с помощью компьютерного процессора компоновки низа бурильной колонны и во время операции бурения временного сдвига путем сравнения первой временной каротажной диаграммы данных и второй временной каротажной диаграммы данных, при этом смещением первой и второй временных каротажных диаграмм данных максимизируют коэффициент корреляции первой и второй временных каротажных диаграмм данных, и определение в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных скорости бурения на основании временного сдвига и заранее заданного расстояния между первым датчиком и вторым датчиком. 3 н. и 12 з.п. ф-лы, 15 ил.
1. Способ управления операцией бурения в подземном пласте, содержащий этапы, на которых:
образуют с помощью первого датчика компоновки низа бурильной колонны (КНБК) и во время операции бурения первую временную каротажную диаграмму данных, представляющую параметр буровой скважины вдоль траектории бурения;
образуют с помощью второго датчика компоновки низа бурильной колонны во время операции бурения вторую временную каротажную диаграмму данных, представляющую параметр буровой скважины вдоль траектории бурения;
определяют во время операции бурения временной сдвиг, сравнивая первую временную каротажную диаграмму данных и вторую временную каротажную диаграмму данных, при этом смещением первой и второй временных каротажных диаграмм данных в соответствии с временным сдвигом максимизируют коэффициент корреляции первой и второй временных каротажных диаграмм данных;
определяют в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных скорость бурения на основании временного сдвига и заранее заданного расстояния между первым датчиком и вторым датчиком; и
выполняют операцию бурения на основании скорости бурения.
2. Способ по п. 1, дополнительно содержащий:
вычисление с помощью компьютерного процессора компоновки низа бурильной колонны и во время операции бурения разности между первой и второй временными каротажными диаграммами данных на основании X[T] и Y[T-t],
при этом коэффициент корреляции обратно пропорционален разности и при этом временной сдвиг определяют на основании по меньшей мере одного, выбираемого из группы, состоящей из
где Σ обозначает суммирование по N моментам времени в первой временной каротажной диаграмме данных, Т обозначает один из N моментов времени, t обозначает временной сдвиг, X[T] обозначает первое нормированное значение первой временной каротажной диаграммы данных в Т и Y[T-t] обозначает второе нормированное значение второй временной каротажной диаграммы данных в T-t.
3. Способ по п. 1, дополнительно содержащий:
деление с помощью компьютерного процессора компоновки низа бурильной колонны и в пределах заранее заданного периода времени заранее заданного расстояния на временной сдвиг для определения скорости бурения;
сброс с помощью компьютерного процессора компоновки низа бурильной колонны и в пределах заранее заданного периода времени скорости бурения до заранее заданного уровня в ответ на определение, что уровень вибрации компоновки низа бурильной колонны меньше, чем заранее заданный порог; и
определение с помощью компьютерного процессора компоновки низа бурильной колонны и в пределах заранее заданного периода времени глубины бурения путем по меньшей мере математического интегрирования скорости бурения на протяжении времени.
4. Способ по п. 1, дополнительно содержащий:
вычисление с помощью компьютерного процессора компоновки низа бурильной колонны и в пределах заранее заданного периода времени по меньшей мере одного параметра бурения, выбираемого из группы, состоящей из скорости повышения кривизны ствола скважины, скорости поворота, резкого искривления ствола скважины и эффективного гравитационного угла положения торца долота, на основании скорости бурения; и
регулирование в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных по меньшей мере одного, выбираемого из группы, состоящей из угла положения торца долота и степени отклонения, на основании по меньшей мере одного параметра бурения.
5. Способ по п. 1, дополнительно содержащий:
определение во время операции бурения множества постоянных интервалов глубин на основании скорости бурения; и
регулирование на множестве постоянных интервалов глубин коэффициента усиления по меньшей мере одного, выбираемого из группы, состоящей из пропорционального контроллера, пропорционального интегрального контроллера и пропорционального интегрального дифференциального контроллера из скважинного управляемого устройства для управления траекторией его.
6. Способ по п. 1, дополнительно содержащий:
определение на основании скорости бурения частоты по меньшей мере одного, выбираемого из группы, состоящей из сохранения выходных сигналов скважинного прибора построения изображений в скважинном запоминающем устройстве компоновки низа бурильной колонны и передачи выходных сигналов скважинного прибора построения изображений к наземному блоку через посредство телеметрии по гидроимпульсному каналу связи.
7. Способ по п. 1, дополнительно содержащий:
передачу скорости бурения к наземному блоку,
при этом в наземном блоке сравнивают для калибровки скорость бурения с определенной на поверхности скоростью бурения.
8. Способ по п. 1,
в котором первый датчик и второй датчик содержат по меньшей мере один, выбираемый из группы, состоящей из датчика оценивания пласта, навигационного датчика, датчика каротажа во время бурения (КВБ), датчика отбора пробы флюида, датчика давления, датчика температуры, скважинной камеры и датчика каверномера, и
в котором первая временная каротажная диаграмма данных и вторая временная каротажная диаграмма данных содержат по меньшей мере одну, выбираемую из группы, состоящей из одномерного массива данных первой временной каротажной диаграммы данных, многомерного массива данных, азимутальных данных и данных об изображении.
9. Способ по п. 1, дополнительно содержащий:
образование с помощью третьего датчика компоновки низа бурильной колонны и во время операции бурения третьей временной каротажной диаграммы данных, представляющей еще один параметр бурения вдоль траектории бурения;
образование с помощью четвертого датчика компоновки низа бурильной колонны во время операции бурения четвертой временной каротажной диаграммы данных, представляющей еще один параметр бурения вдоль траектории бурения;
определение с помощью компьютерного процессора компоновки низа бурильной колонны и во время операции бурения еще одного временного сдвига путем сравнения третьей временной каротажной диаграммы данных и четвертой временной каротажной диаграммы данных, при этом смещением третьей и четвертой временных каротажных диаграмм данных в соответствии с еще одним временным сдвигом максимизируют еще один коэффициент корреляции третьей и четвертой временных каротажных диаграмм данных; и
проверку достоверности скорости бурения на основании еще одного временного сдвига и еще одного заранее заданного расстояния между третьим датчиком и четвертым датчиком,
при этом первый датчик и второй датчик содержат датчик оценивания пласта, и
при этом третий датчик и четвертый датчик содержат навигационный датчик.
10. Компоновка низа бурильной колонны (КНБК), содержащая:
первый датчик, выполненный с возможностью образования во время операции бурения первой временной каротажной диаграммы данных, представляющей параметр буровой скважины вдоль траектории бурения;
второй датчик, выполненный с возможностью образования во время операции бурения второй временной каротажной диаграммы данных, представляющей параметр буровой скважины вдоль траектории бурения; и
вычислитель скорости бурения, выполненный с возможностью:
определения во время операции бурения временного сдвига путем сравнения первой временной каротажной диаграммы данных и второй временной каротажной диаграммы данных, при этом смещением первой и второй временных каротажных диаграмм данных в соответствии с временным сдвигом максимизируется коэффициент корреляции первой и второй каротажных диаграмм данных;
определения в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных скорости бурения на основании временного сдвига и заранее заданного расстояния между первым датчиком и вторым датчиком; и
при этом операция бурения выполняется на основании скорости бурения.
11. Компоновка низа бурильной колонны по п. 10, в которой вычислитель скорости бурения дополнительно выполнен с возможностью:
вычисления во время операции бурения разности между первой и второй временными каротажными диаграммами данных на основании X[T]-Y[T-t],
при этом коэффициент корреляции обратно пропорционален разности и при этом временной сдвиг определяется на основании по меньшей мере одного, выбираемого из группы, состоящей из
где Σ обозначает суммирование по N моментам времени в первой временной каротажной диаграмме данных, Т обозначает один из N моментов времени, t обозначает временной сдвиг, X[T] обозначает первое нормированное значение первой временной каротажной диаграммы данных в Т и Y[T-t] обозначает второе нормированное значение второй временной каротажной диаграммы данных в T-t.
12. Компоновка низа бурильной колонны по п. 10, в которой вычислитель скорости бурения дополнительно выполнен с возможностью:
деления в пределах заранее заданного периода времени заранее заданного расстояния на временной сдвиг для определения скорости бурения;
сброса в пределах заранее заданного периода времени скорости бурения до заранее заданного уровня в ответ на определение, что уровень вибрации компоновки низа бурильной колонны меньше, чем заранее заданный порог; и
определения в пределах заранее заданного периода времени глубины бурения путем по меньшей мере математического интегрирования скорости бурения на протяжении времени.
13. Компоновка низа бурильной колонны по п. 10, дополнительно содержащая вычислитель параметров бурения, выполненный с возможностью:
вычисления в пределах заранее заданного периода времени по меньшей мере одного параметра бурения, выбираемого из группы, состоящей из скорости повышения кривизны ствола скважины, скорости поворота, резкого искривления ствола скважины и эффективного гравитационного угла положения торца долота, на основании скорости бурения; при этом по меньшей мере одно, выбираемое из группы, состоящей из угла положения торца долота и степени отклонения, регулируется в пределах заранее заданного периода времени от образования первой и второй временных каротажных диаграмм данных на основании по меньшей мере одного параметра бурения;
определения во время операции бурения множества постоянных интервалов глубин на основании скорости бурения, при этом коэффициент усиления по меньшей мере одного, выбираемого из группы, состоящей из пропорционального контроллера, пропорционального интегрального контроллера и пропорционального интегрального дифференциального контроллера скважинного управляемого устройства, регулируется для управления траекторией его на множестве постоянных интервалов глубин; и
определения на основании скорости бурения частоты по меньшей мере одного, выбираемого из группы, состоящей из сохранения выходных сигналов скважинного прибора построения изображений в скважинном запоминающем устройстве компоновки низа бурильной колонны и передачи выходных сигналов скважинного прибора построения изображений к наземному блоку через посредство телеметрии по гидроимпульсному каналу связи.
14. Компоновка низа бурильной колонны по п. 10, дополнительно содержащая:
третий датчик, выполненный с возможностью образования во время операции бурения третьей временной каротажной диаграммы данных, представляющей еще один параметр бурения вдоль траектории бурения; и
четвертый датчик, выполненный с возможностью образования во время операции бурения четвертой временной каротажной диаграммы данных, представляющей еще один параметр бурения вдоль траектории бурения,
вычислитель скорости бурения, выполненный с возможностью:
проверки достоверности скорости бурения на основании еще одного временного сдвига и еще одного заранее заданного расстояния между третьим датчиком и четвертым датчиком,
при этом первый датчик и второй датчик содержат датчик оценивания пласта, и
при этом третий датчик и четвертый датчик содержат навигационный датчик.
15. Компьютерный программный продукт, содержащий считываемый компьютером программный код, реализованный в нем, для выполнения способа по любому из пп. 1-9.
| US 20120069713 A1, 22.03.2012 | |||
| СПОСОБ КОРРЕЛИРОВАНИЯ КАРОТАЖНЫХ ДИАГРАММ | 2002 |
|
RU2312375C2 |
| US 20010046042 A1, 29.11.2001 | |||
| US 20080083564 A1, 10.04.2008 | |||
| US 20090090555 A1, 09.04.2009. | |||

