Изобретение относится к области геофизических исследований нефтяных и газовых скважин и может быть использовано для измерения в скважинном приборе глубины его местоположения относительно точки отсчета (стола ротора буровой установки, планшайбы эксплуатационной скважины) [1, стр. 21], а также длины пути вдоль оси ствола скважины [2, стр. 4] от точки отсчета до местоположения скважинного прибора. В данном случае глубина - это проекция длины пути на вертикальную ось [3, стр. 88], поэтому в вертикальных скважинах [4, стр. 20] длина пути и вертикальная глубина равны.
При проведении геофизических исследований и работ приборами на кабеле в нефтяных и газовых скважинах спускоподъемные операции осуществляют путем намотки (смотки) геофизического кабеля на барабан (с барабана) лебедки каротажного подъемника [1, стр. 221], при этом кабель пропускается через систему измерения глубины с роликом [1, стр. 20], которая позволяет получать длину пути вдоль оси ствола скважины от точки отсчета в скважине до местоположения скважинного прибора посредством измерения длины кабеля. Такую длину пути при геофизических исследованиях скважин принято называть глубиной, при этом каротажные данные всегда привязываются к этой глубине. И даже если измерения фиксируются не по глубине, а через определенные интервалы времени, в конечном итоге эти измерения преобразуются в данные, индексированные по глубине. Достоверность получаемых данных является критическим элементом при их интерпретации и зависит от точности измерения данных и глубины. В данном случае определение глубины проводят на поверхности, в этом случае существуют погрешности по отношению к реальной глубине нахождения скважинного прибора в скважине. При проведении каротажа по стволу скважины кабель может растягиваться, в результате чего возникает погрешность измерения глубины.
Предложено несколько различных методов уменьшения погрешности определения глубины.
Известен способ определения глубины оборудования в подземной скважине [5], включающий определение длины кабеля, спущенного в скважину, на поверхности, деление кабеля в скважине на серию элементов. Причем каждый элемент в серии задают как часть кабеля, для которого натяжение рассматривается как эффективно постоянная величина. Затем определяют натяжение в каждом элементе кабеля в скважине, растяжение кабеля в скважине для определенного натяжения во всех элементах и определяют глубину оборудования по длине кабеля, спущенного в скважину с поверхности, и определенному растяжению кабеля в скважине. Этот способ имеет следующий недостаток: в данном случае невозможно учесть такие ситуации, как, когда, к примеру, скважинный прибор застревает в стволе скважины (вследствие различных скважинных и возможно меняющихся условий) при проведении каротажа вверх по стволу скважины, кабель может растягиваться, при этом лебедка продолжает наматывать кабель, а это, в свою очередь, обуславливает возникновение погрешности измерения глубины.
Известен способ измерения глубины скважины при геофизических исследованиях [6], основанный на разметке обсадной колонны по ее длине магнитными метками и счете этих меток. Разметку обсадной колонны производят посредством перемещения мерной базы, вынесенной в скважину разметочной установки, с одновременным исследованием геологического разреза и определением элементов конструкции обсадной колонны. Производят привязку к глубине геологического разреза по данным модуля естественной радиоактивности пород и элементов конструкции обсадной колонны с применением модуля локатора муфт, спускаемых в скважину одновременно с разметочной установкой на геофизическом кабеле. Недостатком данного способа является невозможность измерения глубины в необсаженных скважинах [1]. Также этот способ не позволяет измерять глубину в скважинах, обсаженных с использованием немагнитных труб [7].
Известен способ слежения за местоположением инструмента (в данном случае подразумевается скважинный прибор - это следует из описания изобретения) в буровой скважине [8], включающий получение первого изображения скважины, используя устройство формирования изображения, связанное с инструментом, получение второго изображения скважины, используя устройство формирования изображения по истечении выбранного периода времени, согласование первого изображения со вторым изображением путем смещения одного из первого и второго изображений, определение величины смещения и сравнение величины смещения с опорным расстоянием для определения расстояния перемещения инструмента. Для слежения по изображению могут использоваться любые известные в данной области техники устройства формирования изображения/датчики, включая оптические, акустические, инфракрасные, микроволновые и резистивные. Датчики изображения выполнены в виде матрицы, размер которой должен обеспечивать достоверное формирование изображения. Слежение по изображению предполагает использование специальных алгоритмов сопоставления изображений, некоторые из которых представлены в [9]. Уровень вычислительной сложности данных алгоритмов таков, что их реализация со скоростью обработки, приемлемой для определения местоположения скважинного прибора при геофизических исследованиях скважин [1], возможна только в гибридных оптико-цифровых системах и в высокопроизводительных аппаратных средствах, таких как графические процессоры, или в программируемых матричных устройствах, указанных в [9]. Недостатком данного способа является то, что при работе в обсаженных скважинах изменения изображений внутренней поверхности на всем протяжении обсадной трубы могут быть недостаточными для измерения глубины таким способом, т.е. возможна ситуация, когда два изображения не будут различаться и вследствие этого будет наблюдаться погрешность определения глубины. Влияние состава среды в скважине на возможность измерения глубины путем слежения по изображению также является недостатком, к примеру, для оптических датчиков среда должна быть прозрачной, для акустических датчиков скважина должна быть заполнена любой негазирующей жидкостью плотностью не более 1,3 г/см3 [1, стр. 201] и т.д.
Все изложенные выше способы определения глубины в скважине имеют общий недостаток, а именно: в наклонно направленных скважинах [3, стр. 129], когда забой скважины имеет определенное отклонение от вертикали, этими способами нельзя измерить вертикальную глубину, которая необходима для привязки данных скважинных исследований к геологическому разрезу [3, 76]. Для этих целей проводят дополнительные инклинометрические исследования [1, стр. 179], а привязку данных измерений к вертикальной глубине осуществляют путем последующей комплексной обработки данных инклинометрии и данных скважинных исследований. В результате возможно возникновение значительных погрешностей в определении вертикальной глубины, обусловленных несколькими спускоподъемными операциями и погрешностями при обработке.
Следовательно, а также учитывая актуальность использования наклонно направленных скважин в силу того, что они по производительности значительно превосходят вертикальные скважины [3, 129], существует необходимость в применении методов, позволяющих повысить точность измерений вертикальной глубины и длины пути при геофизических исследованиях скважин.
Предлагаемое изобретение решает задачи измерения в скважинном приборе вертикальной глубины и длины пути вдоль оси ствола скважины от точки отсчета (стола ротора буровой установки, планшайбы эксплуатационной скважины) до местоположения скважинного прибора в вертикальных и наклонно направленных скважинах при проведении геофизических исследований скважин, а также повышения точности измерения этих параметров за счет использования бесплатформенной инерциальной навигационной системы [10], устанавливаемой в скважинный прибор.
Указанные задачи решаются тем, что с применением скважинного прибора, спускаемого в скважину на геофизическом кабеле, содержащего бесплатформенную инерциальную навигационную систему, состоящую из блока электроники, выполненного с использованием высокопроизводительных аппаратных средств и имеющего возможность обработки данных и регистрации результатов обработки при помощи управляющей программы, с подключенными к нему трехосевым датчиком угловой скорости, предназначенным для ориентации данных и расположенным так, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, и трехосевым датчиком линейного ускорения для измерения проекций кажущихся ускорений на оси, связанные с корпусом скважинного прибора, расположенным таким образом, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, а две другие были параллельны двум осям чувствительности датчика угловой скорости, не лежащим на оси скважинного прибора. Блоком электроники через одинаковые интервалы времени производится считывание данных с обоих датчиков и расчет по известным алгоритмам, изложенным в [10], [11], [12], вектора ускорения скважинного прибора в базовой декартовой системе координат с использованием данных трехосевого датчика угловой скорости и учетом начальных условий движения, заданных в блоке электроники в виде соответствующих параметров ориентации. При этом длительность интервалов времени выбирается исходя из требуемой детализации по глубине и точности измерений, начало базовой системы координат находится в точке отсчета скважины, а аппликата направлена вертикально. Далее в блоке электроники производится двойное интегрирование рассчитанного вектора ускорения скважинного прибора в базовой системе координат по известным формулам, изложенным в [13], результатом которого является вектор перемещения в базовой системе координат, при этом проекция этого вектора на вертикальную ось представляет собой глубину и регистрируется блоком электроники.
Также блоком электроники производится двойное интегрирование рассчитанной составляющей вектора ускорения вдоль оси скважинного прибора в базовой системе координат и регистрация результатов интегрирования, результатом которого является перемещение, значение которого является длиной пути вдоль оси ствола скважины от точки отсчета до местоположения скважинного прибора.
Настоящее изобретение, обеспечивающее измерение глубины в скважинном приборе, может быть включено в любой инструмент, используемый в скважине.
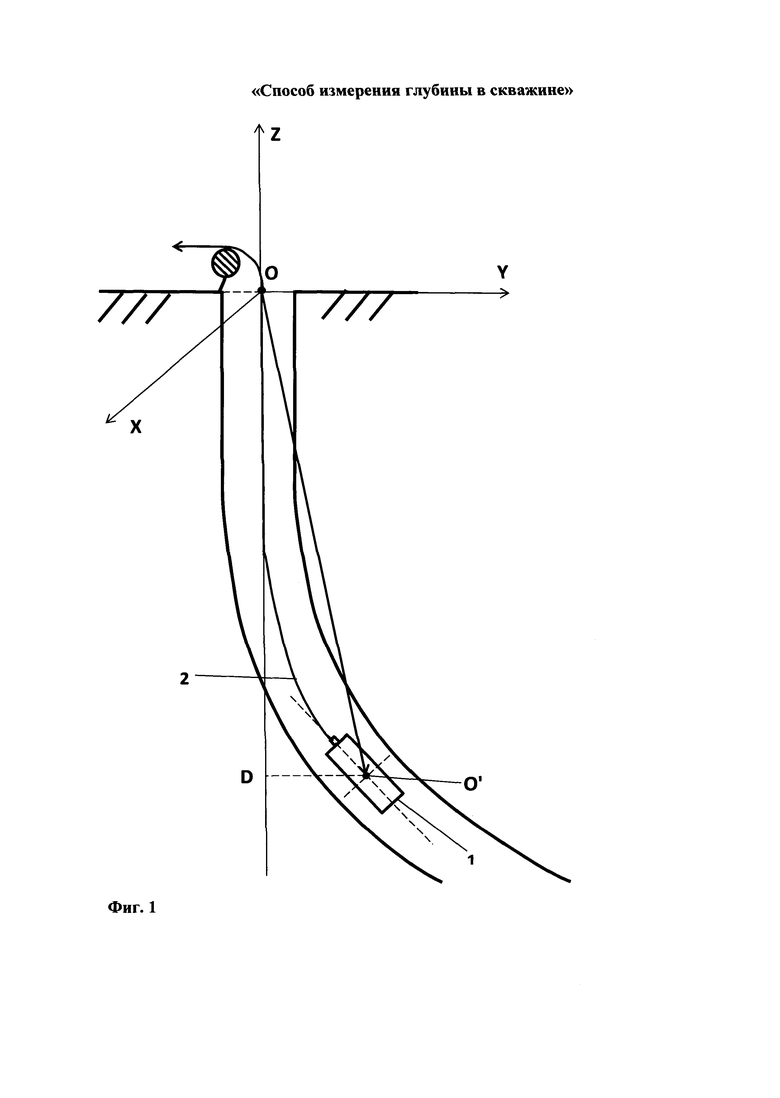
На фиг. 1 представлена схема реализации способа в наклонно направленной скважине.
На фиг. 2 приведена структурная схема скважинного прибора, посредством которого реализуется предлагаемый способ.
Устройство, реализующее способ, представляет собой скважинный прибор 1, спускаемый в скважину на геофизическом кабеле 2 (фиг. 1). Скважинный прибор 1, подключенный к геофизическому кабелю 2, содержит бесплатформенную инерциальную навигационную систему 4, состоящую из блока электроники 7 с подключенными к нему трехосевым датчиком угловой скорости 5, расположенным так, чтобы одна из его осей чувствительности лежала на оси скважинного прибора 3, и трехосевым датчиком линейного ускорения 6, расположенным так, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, а две другие были параллельны двум осям датчика угловой скорости, не лежащим на оси скважинного прибора (фиг. 2).
Способ реализован следующим образом. Перед включением скважинного прибора 1 он устанавливается на устье скважины в точку отсчета О (фиг. 1), относительно которой будет определяться глубина. После включения скважинного прибора 1 блок электроники 7 начинает считывание значений линейного ускорения и угловой скорости по трем осям с трехосевого датчика линейного ускорения 6 и трехосевого датчика угловой скорости 5, после чего осуществляется запоминание этих значений во внутреннюю память блока электроники. Учитывая расположение этих датчиков относительно оси корпуса скважинного прибора, данные, считываемые с трехосевого датчика линейного ускорения 6, представляют собой три значения, являющиеся проекциями кажущегося ускорения на оси системы координат скважинного прибора O'X'Y'Z' (фиг. 2). Данные, считываемые с трехосевого датчика угловой скорости 5, представляют собой три значения, являющиеся угловыми скоростями вращения датчика вокруг осей той же системы координат O'X'Y'Z (фиг. 2). Когда прибор находится на устье, подвижную систему координат O'X'Y'Z' принимаем как базовую OXYZ (фиг. 1), а запомненные в этом положении скважинного прибора данные датчиков используются в дальнейшем при расчетах как начальные условия движения, определяющие параметры ориентации. Считывание данных блоком электроники с датчиков производят через одинаковые интервалы времени, длительность которых выбирается исходя из требуемой детализации по глубине и точности измерений. Каждый раз после считывания данных в блоке электроники 7 (фиг. 2) под управлением управляющей программы производится расчет по известным алгоритмам, изложенным в [10], [11], [12], вектора ускорения скважинного прибора в базовой декартовой системе координат OXYZ, начало которой находится в точке отсчета скважины О (фиг. 1), а аппликата направлена вертикально. Вектор ускорения скважинного прибора в системе координат OXYZ рассчитывается с использованием данных трехосевого датчика угловой скорости и учетом начальных условий движения. Дополнительно в блоке электроники под управлением управляющей программы рассчитывается составляющая вектора ускорения вдоль оси скважинного прибора в базовой системе координат OXYZ.
Для определения вектора перемещения  в базовой системе координат OXYZ (фиг. 1) в блоке электроники под управлением управляющей программы производится двойное интегрирование ускорения скважинного прибора в системе координат OXYZ, проекцией на вертикальную ось будет отрезок ⎪OD⎪ (фиг. 1), который является вертикальной глубиной и регистрируется блоком электроники.
в базовой системе координат OXYZ (фиг. 1) в блоке электроники под управлением управляющей программы производится двойное интегрирование ускорения скважинного прибора в системе координат OXYZ, проекцией на вертикальную ось будет отрезок ⎪OD⎪ (фиг. 1), который является вертикальной глубиной и регистрируется блоком электроники.
Для определения длины пути вдоль оси ствола скважины от точки отсчета до местоположения скважинного прибора в блоке электроники под управлением управляющей программы производится двойное интегрирование составляющей вектора ускорения вдоль оси скважинного прибора в базовой системе координат OXYZ (фиг. 1), результатом которого является перемещение, значение которого является длиной пути вдоль оси ствола скважины от точки отсчета до местоположения скважинного прибора. Затем осуществляется регистрация модуля вектора перемещения.
Таким образом, в любой момент времени после включения скважинного прибора 1 внутренняя память блока электроники 7 (фиг. 2) будет содержать массивы данных вертикальной глубины (длина отрезка ⎪OD⎪) и длины пути вдоль оси ствола скважины от точки отсчета О до местоположения скважинного прибора О' (фиг. 1).
Данное изобретение позволяет проводить измерения в скважинном приборе вертикальной глубины и длины пути вдоль оси ствола скважины от точки отсчета (стола ротора буровой установки, планшайбы эксплуатационной скважины) до местоположения скважинного прибора в вертикальных и наклонно направленных скважинах при проведении геофизических исследований скважин. При этом повышается точность измерения этих параметров за счет использования бесплатформенной инерциальной навигационной системы, устанавливаемой в скважинный прибор. В результате увеличивается точность привязки данных скважинных исследований к геологическому разрезу. На данные измерений не влияют скважинные условия, состояние кабеля, погрешность наземного датчика глубины. Для контроля длина пути и вертикальная глубина также могут передаваться по геофизическому кабелю в наземный регистратор [14].
Технико-экономическая эффективность от использования предлагаемого изобретения определяется тем, что способ позволяет повысить точность измерения вертикальной глубины, а также длины пути вдоль оси ствола скважины от точки отсчета и таким образом определять местонахождение геофизического прибора в скважине относительно геологического разреза.
Источники информации
1. РД 153-39.0-072-01. Техническая инструкция по проведению геофизических исследований и работ приборами на кабеле в нефтяных и газовых скважинах. Москва. 2002 г.
2. ГОСТ Р 53713 2009. Месторождения нефтяные и газонефтяные. Правила разработки.
3. Коршак А.А., Шаммазов А.М. Основы нефтегазового дела: Учебник для вузов. - 3-е изд., испр. и доп. - Уфа.: ООО «ДизайнПолиграфСервис», 2005. - 528 с.
4. Муравьев В. М. Эксплуатация нефтяных и газовых скважин. М., «Недра», 1973, 381 с.
5. Патент на изобретение. 2319002 РФ. МПК Е21В 47/04. Способ определения глубины оборудования в подземной скважине / Фитцджеральд Питер.
6. Патент на изобретение. 2298646 РФ. МПК Е21В 47/04. Способ измерения глубины скважины при геофизических исследованиях / Масленников В.А., Марков В.А., Иванов О.В.
7. Легкосплавная обсадная труба. Режим доступа: http://akvatik-dp.ru/JIOT.htm (дата обращения: 23.12.2015).
8. Патент на изобретение. 2461708 РФ. МПК Е21В 47/04, G01B 21/18. Автономный контроль глубины для скважинного оборудования / Гудман Кеннет.
9. Алгоритм сопоставления изображений на основе скользящих гистограмм направленных градиентов. Режим доступа:
http://www.jip.ru/2014/56-63-2014.pdf (дата обращения: 23.12.2015).
10. Мелешко В.В., Нестеренко О.И. Бесплатформенные инерциальные навигационные системы. Учебное пособие. - Кировоград: ПОЛИМЕД-Сервис, 2011.- 171 с.
11. Коваленко В.В., Малогабаритная инерциальная система. Учебное пособие. - Челябинск: 2010. - 53 с.
12. Матвеев В.В. Основы построения бесплатформенных инерциальных систем. СПб.: ГНЦ РФ ОАО "Концерн "ЦНИИ Электроприбир",2009. - 280 с.
13. Конев В.В., Векторная алгебра. Учебное пособие. - Томск. Изд. ТПУ. 2008. -31 с.
14. Блок каротажного регистратора ВУЛКАН V3. Режим доступа: http://www.npf-geofizika.ru/?part_id=41,251 &obj_id=438 (дата обращения: 07.12.2015).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ МНОГОСЕКТОРНЫЙ ДЕФЕКТОСКОП | 2016 |
|
RU2622509C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| БЕЗПЛАТФОРМЕННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС С ИНЕРЦИАЛЬНОЙ СИСТЕМОЙ ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ И СПОСОБ КОРРЕКЦИИ ЕГО ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2014 |
|
RU2548115C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ЦЕНТРА МАСС | 2015 |
|
RU2590287C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |

Изобретение относится к области геофизических исследований нефтяных и газовых скважин и может быть использовано для измерения в скважинном приборе глубины, а также длины пути вдоль оси ствола скважины. Техническим результатом является повышение точности измерения этих параметров и, следовательно, точности привязки данных скважинных исследований к геологическому разрезу. Технический результат достигается за счет способа с применением скважинного прибора, содержащего бесплатформенную инерциальную навигационную систему, состоящую из блока электроники с подключенными к нему трехосевым датчиком угловой скорости, расположенным так, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, и трехосевым датчиком линейного ускорения, расположенным таким образом, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, а две другие были параллельны двум осям чувствительности датчика угловой скорости, включающего расчет векторов ускорения и перемещения скважинного прибора в базовой системе координат, результатом которого является определение вертикальной глубины и длины пути, которые регистрируются блоком электроники. 1 з.п. ф-лы, 2 ил.
1. Способ измерения глубины в скважине с применением скважинного прибора, спускаемого в скважину на геофизическом кабеле, содержащего бесплатформенную инерциальную навигационную систему, состоящую из блока электроники, выполненного с использованием высокопроизводительных аппаратных средств, имеющего возможность обработки данных и регистрации результатов обработки при помощи управляющей программы, с подключенными к нему трехосевым датчиком угловой скорости, предназначенным для ориентации данных и расположенным так, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, и трехосевым датчиком линейного ускорения для измерения проекций кажущихся ускорений на оси, связанные с корпусом скважинного прибора, расположенным так, чтобы одна из его осей чувствительности лежала на оси скважинного прибора, а две другие были параллельны двум осям чувствительности датчика угловой скорости, не лежащим на оси скважинного прибора, включающий этапы:
(a) запоминания данных трехосевого датчика угловой скорости и трехосевого датчика линейного ускорения в положении скважинного прибора на устье скважины для фиксации базовой системы координат;
(b) считывания данных трехосевого датчика угловой скорости и трехосевого датчика линейного ускорения через одинаковые интервалы времени, длительность которых выбирается исходя из требуемой детализации по глубине и точности измерений;
(c) расчета векторов ускорения и перемещения скважинного прибора в базовой системе координат;
(d) регистрации модуля вектора перемещения, являющегося вертикальной глубиной.
2. Способ измерения глубины в скважине по п. 1, включающий этапы:
(a) расчета составляющей вектора ускорения вдоль оси скважинного прибора в базовой системе координат и последующего расчета перемещения;
(b) регистрации значения перемещения, являющегося длиной пути вдоль оси ствола скважины от точки отсчета до местоположения скважинного прибора.
| АВТОНОМНЫЙ КОНТРОЛЬ ГЛУБИНЫ ДЛЯ СКВАЖИННОГО ОБОРУДОВАНИЯ | 2008 |
|
RU2461708C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1926 |
|
SU7499A1 |
| Несущие поверхности для летательных аппаратов | 1926 |
|
SU11204A1 |
| US 20050149265 A1, 07.07.2005. | |||

