Изобретение относится к электронно-измерительной технике и нанотехнологиям, предназначено в том числе для использования со сканирующим зондовым микроскопом (СЗМ) при исследовании микро- и нанорельефа поверхности. Известно исследование нанорельефа на поверхности методом сканирующей микроскопии (зондовые и сканирующие микроскопы). В качестве сканирующего устройства могут использоваться сканирующий туннельный микроскоп (СТМ), атомно-силовой микроскоп (АСМ), сканирующий-емкостный микроскоп, сканирующий электронный микроскоп, сканирующий оптический микроскоп ближнего поля и т.д.
Одной из проблем в этой области является необходимость систем позиционирования зонда микроскопа или обрабатывающего инструмента, особенно при исследовании поверхностей больших размеров.
Известен сканирующий зондовый микроскоп, настройка которого включает позиционирование зонда в необходимую область поверхности образца, осуществляемое визуально при помощи наблюдения зонда и поверхности образца в оптический микроскоп (см. Неволин В.К. Зондовые нанотехнологии в электронике, М., 2006, стр.18 и Version 4.22-15JULY96 MultiMode SPM Instruction Manual, Chapter 6.2.3).
Однако данный способ настройки микроскопа не позволяет точно позиционировать зонд микроскопа в необходимую область поверхности образца, например вершину, впадину или участок поверхности образца с наклоном. Другие недостатки СЗМ связаны с необходимостью использования специального калибровочного эталона при калибровке сканера, а также с невозможностью точного позиционирования зонда микроскопа в необходимую область поверхности образца, например вершину, впадину или участок поверхности образца с наклоном.
Известен сканирующий зондовый микроскоп и способ его настройки, который включает калибровку сканера и/или позиционирование зонда на основе интерференционной картины, полученной путем дополнительного использования источника светового потока и разделения потока света на два когерентных потока света, которые проходят различные оптические пути, а затем сводятся вместе и направляются в систему видеонаблюдения микроскопа или дополнительную систему видеонаблюдения. При калибровке сканера один из световых потоков претерпевает отражение от поверхности образца и/или зонда, а при позиционировании зонда световой поток претерпевает отражение от поверхности образца.
Один из вариантов СЗМ включает систему видеонаблюдения, держатель образца, сканер, зонд, держатель зонда и систему для перемещений держателя образца. Кроме того, он дополнительно содержит закрепленные с возможностью ориентации в пространстве источник светового потока, отражательный элемент и оптический делительный элемент, как пропускающий, так и отражающий часть светового потока, идущего от источника, причем держатель образца расположен на пути одного из потоков света, отраженного или пропущенного делительным элементом, а отражательный элемент - на пути второго потока света таким образом, чтобы ход световых потоков, отраженных от поверхности отражательного элемента и от поверхности держателя образца или поверхности помещенного на него исследуемого образца, совпадал с ходом падающих на них световых потоков, и после дальнейшего отражения одного отраженного светового потока от делительного элемента и прохождения второго отраженного светового потока через делительный элемент каждый из них был направлен в систему видеонаблюдения. По расстояниям между полосами и их толщине определяют угол наклона участка поверхности кристалла.
В техническом решении можно использовать различные держатели образца, например магнитный, механический, держатель на липкой основе и т.д. Держатели образца могут быть закреплены как жестко, так и с возможностью ориентации в пространстве, достигаемой за счет использования, например, шарового шарнира, системы цилиндрических шарниров, пластичного крепления, винтов, их комбинации и т.д. При реализации предлагаемого технического решения предпочтительно использовать держатели образца, закрепленные с возможностью ориентации в пространстве. Система для перемещений держателя образца может быть выполнена на основе механических редукторов перемещений, винтов, шаговых электродвигателей, шаговых пьезодвигателей и т.д. Позиционирование зонда в необходимую область поверхности образца можно проводить как вручную, так и в автоматическом режиме с наблюдением относительного положения зонда и поверхности образца в системе видеонаблюдения или визуально. В СЗМ сканирование можно осуществлять двумя различными способами. В первом случае с помощью сканера зонд перемещают относительно неподвижного образа, закрепленного в держателе. Во втором случае сканирование производят при перемещении держателя с закрепленным образцом относительно неподвижного зонда (см. патент на изобретение. №2382389, МПК G02B 21/00).
Известно, что при измерении рельефа поверхности сканирующим зондовым микроскопом используют особенности поверхности в качестве опорных точек при выполнении перемещений. Перемещения осуществляют от одной особенности к другой, расположенной по соседству. В результате образуется связанная цепочка, в которой особенности размещены относительно друг друга. Поиск, обнаружение и вычисление координат положения особенности выполняет программа распознавания. Сканируя небольшую область вокруг каждой особенности, а затем раскладывая полученные фрагменты поверхности по соответствующим позициям, определенным при распознавании, можно реконструировать реальный рельеф поверхности. Наличие информации о координатах положения особенностей вместе с механизмом привязки позволяет осуществлять прецизионное позиционирование зонда (см. патент на изобретение №2175761, МПК G01N 13/12).
Однако данные микроскопы предназначены для работы с небольшими образцами и не могут исследовать образцы больших размеров, содержащие наклонные поверхности, вершины и впадины.
Близким к заявленному является сканирующий зондовый микроскоп для получения изображения образца в соответствии с взаимодействием между образом и зондом, выполненный с возможностью осуществления в ходе работы сканирования поверхности образца и содержащий: средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца и способное приводить образец и зонд в непосредственную близость друг с другом, достаточную для установления между ними детектируемого взаимодействия; средство придания колебаний либо зонду, либо образцу; механизм детектирования зонда, выполненный с возможностью измерения, по меньшей мере, одного параметра, характеризующего интенсивность взаимодействия между зондом и образцом; и механизм обратной связи, выполненный с возможностью обеспечения регулирования отделяющего зонд и образец расстояния за счет приведения в действие средства привода в качестве отклика на изменение среднего значения одного из упомянутых параметров относительно предварительно заданного значения, отличающийся тем, что средство придания колебаний обеспечивает относительное колебательное движение зонда по занятой образцом поверхности так, что зонд выполняет по существу линейную развертку поверхности образца, причем во время сканирования поверхности образца участок сканирования охватывается за счет упорядоченного расположения строк сканирования, каждая из которых снимается при колебании либо зонда, либо образца на его резонансной частоте или около его резонансной частоты, так что двойная амплитуда колебания равна максимальной длине строки сканирования, а их упорядоченное расположение обеспечивается действием средства привода (см. заявку на изобретение РФ №: 2005102703/28, 04.07.2003).
Недостатком известного СЗМ является невозможность наклона образца под нужным углом к зонду.
Технической задачей является создание СЗМ, который может исследовать поверхность или как-то взаимодействовать с участками поверхности образца, имеющего большие размеры, при этом образец имеет сложную поверхность с вершинами, впадинами, наклонными участками.
Технический результат заключается в расширении функциональных возможностей СЗМ за счет обеспечения возможности работы микроскопа с образцами большого размера и сложной формы путем требуемого для исследования позиционирования образца и измерения расстояния между зондом и образцом.
Заявленный технический результат достигается тем, что заявленный СЗМ, содержащий виброизоляционное основание, средство привода точного позиционирования, обеспечивающее детектируемое взаимодействие между зондом и образцом, механизм детектирования зонда и механизм обратной связи, обеспечивающий регулирование расстояния, отделяющего зонд и образец, дополнительно содержит шестиосевую механическую систему сближения и позиционирования, программируемый блок управления измерением и перемещением, а также измерительный датчик с механизмом обратной связи.
Сканирующий зондовый микроскоп выполнен с возможностью в ходе работы сканирования поверхности образца 1 и исследования его электрофизических параметров (диэлектрической проницаемости, электропроводности) с нанометровым пространственным разрешением. Микроскоп содержит зонд 2, средство привода, которое состоит из прецизионного механизма перемещения 3, например пьезоэлектрического привода, подключенного к зонду 2, и системы точного позиционирования 4 образца, например, в виде X, Y, Z пьезоэлектрического преобразователя. Средство привода обеспечивает возможность относительного движения между зондом 2 и поверхностью образца 1 и способно приводить образец и зонд в непосредственную близость друг с другом, достаточную для установления между ними детектируемого взаимодействия. К зонду 2 подключен механизм детектирования 5 зонда, выполненный с возможностью измерения, по меньшей мере, одного параметра, характеризующего интенсивность взаимодействия между зондом 2 и образцом 1. Механизм детектирования 5 зонда подключен через механизм обратной связи 6 к системе индикации, например компьютеру 7. Механизм обратной связи 6 выполнен с возможностью обеспечения регулирования отделяющего зонд и образец расстояния за счет приведения в действие средства привода в качестве отклика на изменение среднего значения одного из параметров относительно предварительно заданного значения.
Микроскоп дополнительно содержит шестиосевую систему сближения и позиционирования 8, выполненную с возможностью перемещения по шести координатам для обеспечения работы СЗМ с образцами больших размеров сложной формы, так чтобы исследуемая поверхность находилась нужным участком поверхности 1 под нужным углом относительно зонда 2. Система сближения и позиционирования 8 размещена на виброизоляционном основании 9, являющемся также основанием для механизма 3. Она может быть выполнена в виде платформы Стюарта. Система 8 подключена к блоку управления шестиосевым перемещением и измерением 10, соединенным с измерительным датчиком 11.
Шестиосевая система сближения и позиционирования 8 содержит тяги с 6 независимыми приводами, измерительную раму с 6 линейными измерителями, и соединена с системой точного позиционирования 4, на которой закреплен образец 1.
Блок управления 10 шестиосевым перемещением и измерением представляет собой программируемый электронно-вычислительный комплекс, который обеспечивает управление системой сближения и позиционирования 8. Блок управления 10 управляет перемещением образца, обеспечивая расположение объекта нужным участком под нужным углом. Блок управления 10 содержит блок расчета и построения математической модели и выполняет привязку системы координат к конкретному образцу. Следит за наличием или отсутствием касания поверхности образца измерительный датчик 11, также зафиксированнный на основании 9.
Измерительный датчик 11 содержит корпус и размещенный в нем щуп и сигнализатор касания поверхности. Измерительный датчик нужен для сбора точек с поверхности образца и построения его реальной математической модели.
Для того чтобы обеспечить работу СЗМ с образцами большого размера и/или сложной формы, необходимо знать математическую модель реального образца. Для этого при помощи системы сближения и позиционирования 8 жестко закрепленный образец 1 сначала подводится к измерительному датчику 11 и осуществляется сбор координат точек с поверхности. В результате строится математическая модель поверхности и описывается ее положение в системе координат сканирующего зондового микроскопа.
Теперь образец 1 приводится в непосредственную близость к зонду 2 с использованием шестиосевой системы сближения и позиционирования 8 под заданным углом заданным участком поверхности. Нормаль к исследуемому участку поверхности должна располагаться под заданным углом относительно оси зонда. Устройство 8 будет перемещать образец так, что зонд будет всегда располагаться в нужном участке над поверхностью под заданным углом к исследуемой поверхности. Точные регулировки высоты и исходного стартового положения образца производят с помощью пьезоэлектрического преобразователя 4, в то время как механизм детектирования 5 измеряет изгиб кантилевера зонда, возникающий в результате взаимодействия зонд-образец. Как только измеряемый изгиб достиг заданной величины, поверхность образца сканируется под зондом. Механизм обратной связи 6 настроен на поддержание среднего изгиба кантилевера постоянным по величине за счет соответствующего перемещения образца с помощью системы точного позиционирования 4. Выходной сигнал, формируемый механизмом обратной связи 6, направляется непосредственно на компьютер 7 и отображается на его дисплее.
Микроскоп может содержать дополнительный зонд 12, соединенный с зондом 2 и расположенный в непосредственной близости от него, источник 13 и приемник 14 СВЧ-сигнала, соединенные с помощью волноведущей системы 15 с дополнительным зондом 12.
Дополнительный зонд при этом представляет собой отрезок коаксиальной линии передачи с центральным проводником, выдвинутым за пределы внешнего проводника на величину, много меньшую длины волны СВЧ-сигнала, при этом приемник 14 сигнала соединен с системой точного позиционирования 4.
Дополнительный зонд является источником ближнего СВЧ-поля, с помощью которого обеспечивается возможность проведения нанометровых измерений. СВЧ-сигнал от источника электромагнитного излучения 13 через волноведущую систему 15 поступает на дополнительный зонд 12, после взаимодействия СВЧ-поля с поверхностью исследуемого образца отраженный от поверхности образца СВЧ-сигнал поступает на приемник СВЧ-сигнала 14. По величине, по меньшей мере, одной из характеристик сигнала приемника при известном расстоянии от дополнительного зонда до поверхности образца, проведя предварительную калибровку сигнала приемника с использованием эталонных образцов, судят о параметрах исследуемого образца (диэлектрическая проницаемость, электропроводность, толщина).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА И СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382389C2 |
| Способ исследования микрообъектов и ближнепольный оптический микроскоп для его реализации | 2016 |
|
RU2643677C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ СРЕЗАНИЯ ТОНКИХ СЛОЕВ ОБЪЕКТА | 2004 |
|
RU2287129C2 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ОПТИЧЕСКИМ МИКРОСКОПОМ | 2002 |
|
RU2244332C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ ИЗМЕРЕНИЯ МАССЫ И ДИССИПАТИВНЫХ СВОЙСТВ | 2008 |
|
RU2407021C2 |
Изобретение относится к электронно-измерительной технике и нанотехнологиям и предназначено в том числе для использования со сканирующим зондовым микроскопом (СЗМ) при исследовании микро- и нанорельефа поверхности. СЗМ содержит виброизоляционное основание, средство привода точного позиционирования, обеспечивающее детектируемое взаимодействие между зондом и образцом, механизм детектирования зонда и механизм обратной связи, обеспечивающий регулирование расстояния, отделяющего зонд и образец, а также шестиосевую механическую систему сближения и позиционирования, программируемый блок управления измерением и перемещением, измерительный датчик с механизмом обратной связи. Технический результат - расширение функциональных возможностей СЗМ за счет обеспечения возможности работы микроскопа с образцами большого размера и сложной формы путем требуемого для исследования позиционирования образца и измерения расстояния между зондом и образцом. 1 з.п. ф-лы, 1 ил.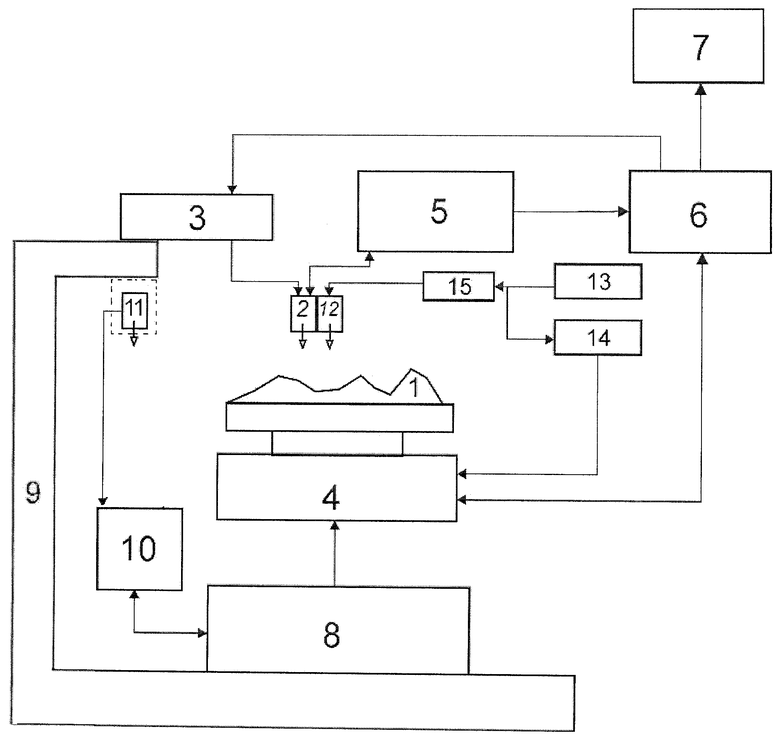
1. Сканирующий зондовый микроскоп для исследования образца, содержащий средство привода образца, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца и способное приводить образец и зонд в непосредственную близость друг с другом, достаточную для установления между ними детектируемого взаимодействия, механизм детектирования, вход которого соединен с зондом, а выход - с входом механизма обратной связи, выход которого соединен с входом системы индикации и со средством привода, приводимого в действие механизмом обратной связи в качестве отклика на изменение среднего значения одного из параметров относительно предварительно заданного значения, виброизоляционное основание, отличающийся тем, что дополнительно содержит размещенную на виброосновании систему сближения и позиционирования, выполненную с возможностью регулируемого перемещения по шести координатам, так чтобы нормаль к исследуемому участку поверхности располагалась под заданным углом относительно оси зонда, и соединенную с системой точного позиционирования и подключенную к блоку управления системой сближения и позиционирования, соединенному с измерительным датчиком для предварительного сбора координат точек с исследуемой поверхности и построения по собранным точкам математической модели образца, при этом средство привода состоит из прецизионного механизма перемещения и системы точного позиционирования образца, входы которых соединены с выходами механизма обратной связи.
2. Микроскоп по п.1, отличающийся тем, что он содержит дополнительный зонд, соединенный с зондом и расположенный в непосредственной близости от него, источник и приемник СВЧ-сигнала, соединенные с помощью волноведущей системы с дополнительным зондом, при этом дополнительный зонд представляет собой отрезок коаксиальной линии передачи с центральным проводником, выдвинутым за пределы внешнего проводника на величину, много меньшую длины волны СВЧ-сигнала, а приемник сигнала соединен с системой сближения и позиционирования.
| RU 2005102703 А, 20.08.2005 | |||
| US 2006230474 A1, 12.10.2006 | |||
| JP 2001296229 A, 26.10.2001 | |||
| US 5172002 A, 15.12.1992. |

