Изобретение относится к измерительной технике, а именно к способам измерения с помощью сканирующего зондового микроскопа (СЗМ) рельефа, линейных размеров и физических характеристик поверхности объектов (образцов) в режимах сканирующего туннельного микроскопа (СТМ), атомно-силового микроскопа (АСМ), близкопольного оптического микроскопа (БОМ) и др.
Известны способы сканирования образцов с помощью СЗМ (см. [1], [2], [3], [4]). В этих способах, в случаях исследования малоразмерных образцов, образец помещают в держатель образца и устанавливают на пьезосканере, который в свою очередь размещают на механизме сближения, расположенном на основании прибора. Зонд помещают в держатель зонда и устанавливают над поверхностью образца. При исследовании преимущественно крупноразмерных образцов образец также помещают в держатель образца и устанавливают на механизме сближения, а зонд - в держатель зонда, который закрепляют на пьезосканере и также устанавливают над поверхностью образца. Затем в обоих вариантах производят сближение зонда и образца с помощью механизма сближения. При этом используемая система регистрации измеряет полезный сигнал, являющийся функцией взаимного положения зонда и поверхности исследуемого образца. При работе в режиме СТМ система регистрации фиксирует туннельный ток, протекающий между зондом и образцом, подключенными к источнику напряжения. Режим работы АСМ предусматривает регистрацию величины отклонения консоли кантилевера (зонда) или изменения характеристик ее колебаний при сближении с поверхностью образца. При работе в режиме БОМ регистрируется изменение уровня освещенности вблизи острия световода, являющегося в данном случае зондом, при сканировании им поверхности образца. Общим недостатком описанных способов является недостаточный диапазон сканирования.
Известен также способ сканирования объектов с помощью сканирующего зондового микроскопа, при котором объект устанавливают на первом пьезосканере, зонд закрепляют на втором пьезосканере и располагают над исследуемой поверхностью объекта и производят их сближение, затем, используя взаимное перемещение двух пьезосканеров, производят сканирование в противофазе по каждой из координат сканирования, далее с использованием системы регистрации измеряют полезный сигнал, являющийся функцией взаимного положения зонда и поверхности объекта [5]. Этот способ выбран в качестве прототипа предложенного решения.
Основной недостаток описанного способа заключается в том, что практически невозможно подобрать два пьезосканера с одинаковыми активными элементами, а это при отсутствии контроля за их перемещением приведет к снижению разрешения способа сканирования.
Задача предлагаемого изобретения заключается в повышении разрешения способа сканирования.
Поставленная задача достигается тем, что в способе сканирования образцов с помощью СЗМ, в котором объект устанавливают на первом пьезосканере, зонд закрепляют на втором пьезосканере и располагают над исследуемой поверхностью объекта и производят их сближение, затем, используя взаимное перемещение двух пьезосканеров, производят сканирование в противофазе по каждой из координат сканирования, далее с использованием системы регистрации измеряют полезный сигнал, являющийся функцией взаимного положения зонда и поверхности объекта, используют пьезосканеры с эквивалентными активными элементами, положение одного из пьезосканеров измеряют по каждой из координат сканирования X, Y, Z и по результатам этих измерений определяют величины перемещений по этим координатам каждого из пьезосканеров, при этом сканирование осуществляют путем вращения зонда и образца вокруг соответствующих фиксированных центров.
Существует также вариант, где на каждый из активных элементов пьезосканеров устанавливают эквивалентные присоединенные массы.
Возможен также вариант, в котором сканирование производят с отключением, по крайней мере, одной из координат на одном из пьезосканеров.
Приведенные графические материалы поясняют схему осуществления предлагаемого способа.
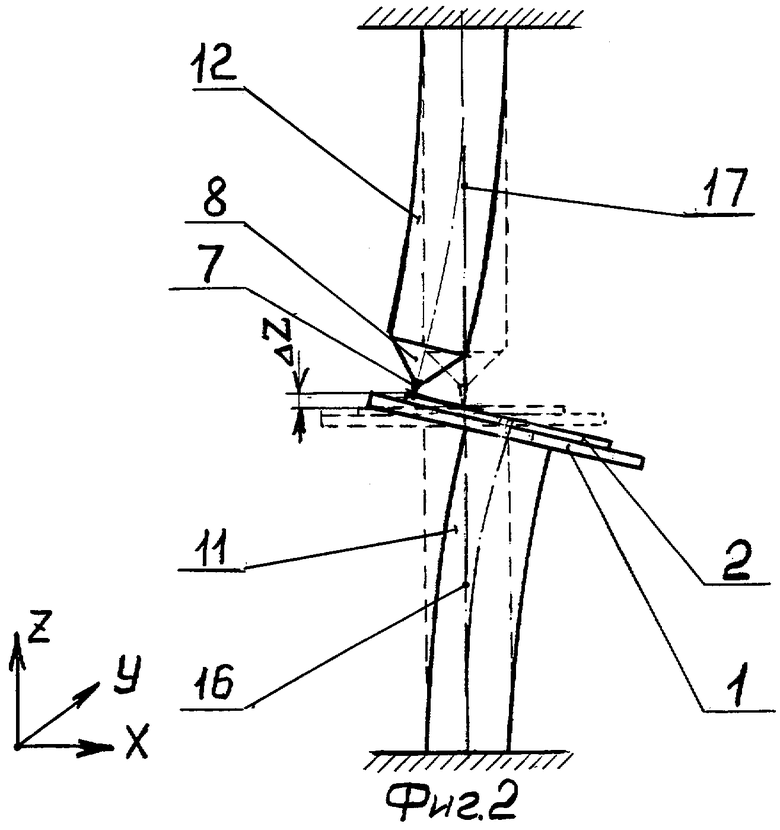
Фиг.1 показывает схему размещения двух пьезосканеров, зонда и образца при проведении сканирования по этому способу. Фиг.2 схематично изображает возникновение нефункциональных перемещений по координате Z на трубочном пьезосканере с центрально расположенным зондом при изгибе пьезотрубки и отработке координат X, Y. Фиг.3 показывает нефункциональные перемещения при воздействии на основание прибора импульса силы (вибрации). На Фиг.4 изображена схема возникновения нефункциональных перемещений при сканировании по предлагаемому способу многозондовым картриджем путем вращения зонда и образца вокруг соответствующих фиксированных центров, расположенных на оси системы О1-О2.
Держатель образца 1 (Фиг.1) с образцом 2 установлен на первом пьезосканере 3 (отрабатывает координаты X1, Y1, Z1), который, в свою очередь, расположен на механизме сближения 4. Над исследуемой поверхностью образца 2 помещен блок анализа 5, содержащий второй пьезосканер 6 (отрабатывает координаты X2, Y2, Z2) с закрепленным на нем зондом 7, установленным в держатель зонда 8. Блок анализа 5 установлен на основании 9. В варианте сканирования СТМ образец 2 и зонд 7 подключены к системе регистрации 10. Первый пьезосканер 3 с установленным на нем держателем образца 1 с образцом 2 содержит активный элемент 11. Второй пьезосканер 6 с зондом 7 содержит активный элемент 12 с присоединенными к нему датчиками положения 13 (координата Х2), 14 (координата Y2) и 15 (координата Z2). Датчики 13 и 14 показаны условно развернутыми по углу на 180° (вместо 90°).
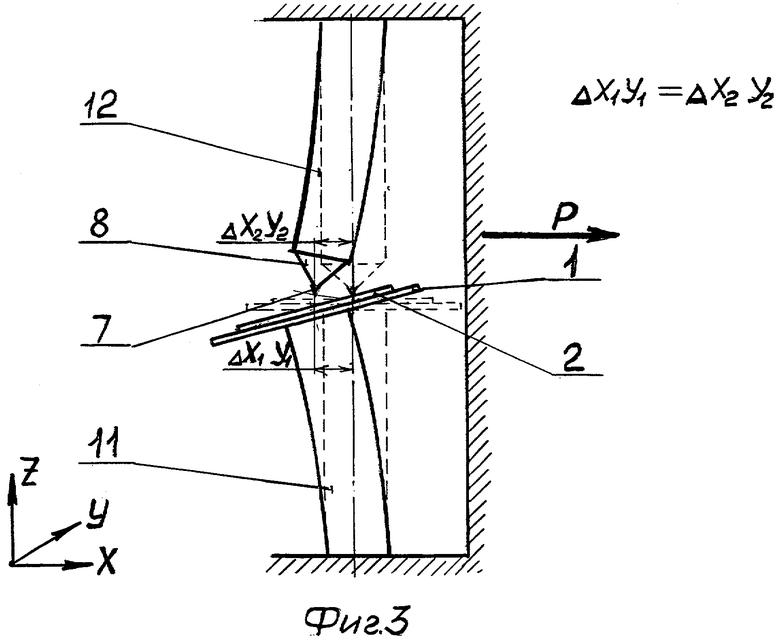
На Фиг.2 схематично показана величина перемещения ΔZ по координате Z центрально расположенного зонда 7 относительно исходного положения образца 2, вызванная изгибом активных элементов (пьезотрубок) 11 и 12 при отработке координат Х, Y и вращении относительно центров изгиба 16 и 17.
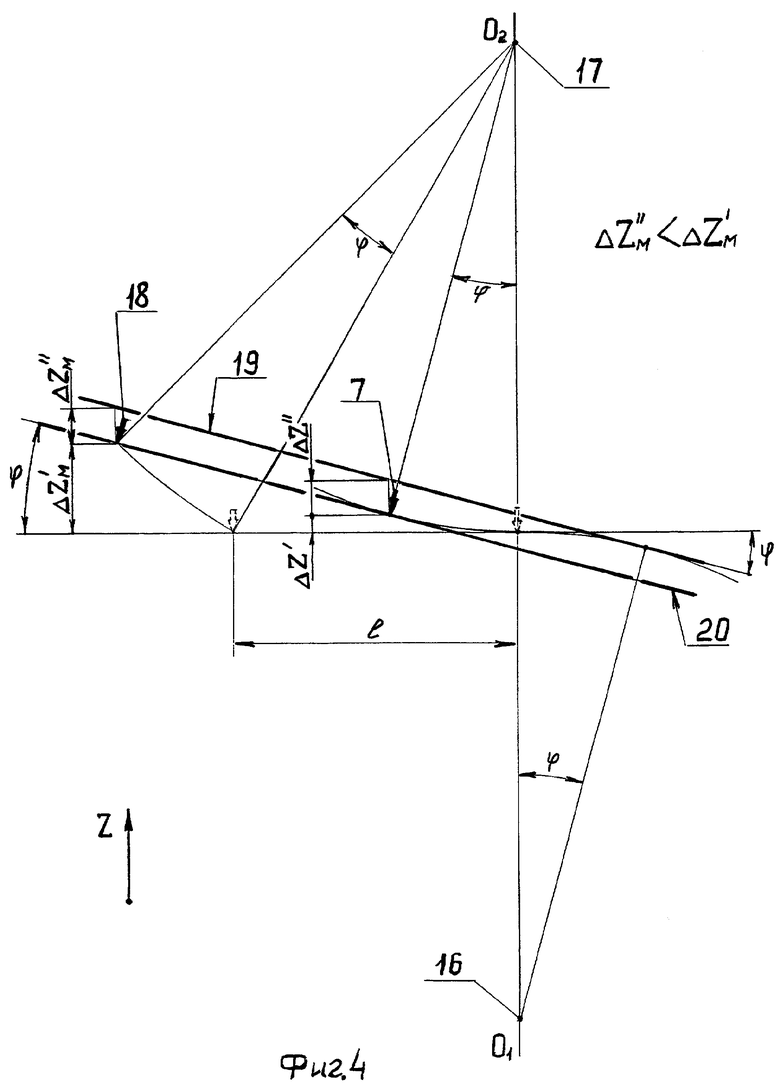
Нефункциональные перемещения в плоскости образца 2 (по координатам X, Y) при воздействии на основание поперечного импульса силы Р будут ΔX1Y1 у пьезотрубки 11 и ΔХ2Y2 у пьезотрубки 72 (см. Фиг.3).
На Фиг.4 показано, что нефункциональное перемещение центрально расположенного зонда 7 по координате Z при неподвижном образце 2 и повороте зонда 7 вокруг центра вращения 17 на некоторый угол ϕ (известный способ сканирования) будет ΔZ', а при одновременном повороте и образца 2 вокруг центра вращения 16 (предлагаемый способ сканирования) - ΔZ''. При сканировании многозондовым картриджем [6, 7] для смещенного относительно оси O1-O2 зонда 18 на некоторое расстояние l такие нефункциональные перемещения будут соответственно ΔZ'M и ΔZ''M. При этом первая плоскость 19 поверхности образца и вторая плоскость 20 острий зондов картриджа развернуты относительно исходного положения на вышеуказанный угол ϕ. При использовании в качестве активных элементов пьезотрубок указанные нефункциональные перемещения ΔZ' и ΔZ'', а также ΔZ'M и ΔZ''M, сохраняя свой характер, будут несколько отличаться от приведенных на Фиг.4. Эти отличия вызваны изменением длин пьезотрубок при их вращении относительно фиксированных центров и отработке координат X, Y.
Сканирование образца по предлагаемому способу проводят следующим образом (см. Фиг.1).
Образец 2 помещают в держатель образца 1 и устанавливают на первом пьезосканере 3, расположенном на механизме сближения 4. Зонд 7 устанавливают в держатель зонда 8. Затем блок анализа 5, содержащий второй пьезосканер 6, устанавливают на основание 9 над образцом 2. При работе в режиме СТМ образец 2 и зонд 7 подключают к системе регистрации 10 и производят сближение зонда и образца с помощью механизма сближения 4. Подробнее методы сближения, регистрации полезного сигнала, управления сканерами и механизмом сближения даны в литературе [1], [2] и [3]. При достижении необходимого расстояния между зондом и образцом сближение прекращают и осуществляют сканирование зондом поверхности образца. При этом оба пьезосканера включают в противофазе по каждой из координат сканирования.
По сигналам датчиков положения 13, 14 и 15, установленных, например, на пьезосканере 6, определяют величины перемещений по тем же координатам пьезосканера 3 (и образца 2).
В варианте сканирования, когда оба активных элемента сканеров снабжены эквивалентными присоединенными массами, такими массами являются:
а) для активного элемента 11 (сканер 3) - масса держателя образца 1 и масса образца 2;
б) для активного элемента 12 (сканер 6) - масса держателя зонда 8 и масса зонда 7, а также масса обкладок датчиков положения 13, 14 и 75.
Предложенный способ сканирования объектов позволяет отключать, по крайней мере, одну из координат на одном из сканеров.
При сканировании преимущественно многозондовыми картриджами по предложенному способу сканирование осуществляют путем вращения зонда и образца вокруг соответствующих фиксированных центров.
Использование пьезосканеров с эквивалентными активными элементами, положение одного из которых измеряют по каждой из координат сканирования и определяют величины перемещений по этим координатам каждого из пьезосканеров, повышает разрешение способа сканирования. Это достигается тем, что повышается координатная достоверность каждой точки измерения. Вращение зонда и образца вокруг фиксированных центров с одновременным координатным измерением повышает разрешение при сканировании многозондовыми картриджами.
При сканировании по предложенному способу сканерами на пьезотрубках с эквивалентными присоединенными массами (т.е. с одинаковыми резонансными частотами) достигается взаимная компенсация нефункциональных перемещений ΔX1Y1 и ΔX2Y2 при воздействии на основание импульса силы Р (действие вибрации) в направлении этих координат (см. Фиг.3). В этом случае присоединенные массы на концах пьезотрубок колеблются синфазно, и ΔX1Y1=ΔX2Y2.
При использовании двух разноразмерных сканеров, имеющих разные (хотя бы по одной координате) диапазоны отработки координат и разные резонансные частоты, можно по данному способу проводить сканирование с отключением, по крайней мере, одной из координат на одном из сканеров. При этом возможны различные варианты сканирования. Например:
1. Требуется получение больших по площади сканов на образце с малым по высоте рельефом.
В этом случае отключается координата Z у низкочастотного (крупноразмерного) сканера, диапазоны сканирования по координатам X, Y обоих сканеров складываются, и сканирование рельефа образца происходит с частотой высокочастотного (малоразмерного) сканера, т.е. более точного и скоростного.
2. Требуется получение сканов на образцах с высоким профилем рельефа.
При этом у низкочастотного (крупноразмерного) сканера отключаются координаты Х и Y, диапазоны по координате Z обоих сканеров складываются, и сканирование высокопрофильного образца происходит на малом поле также с высокой точностью и скоростью, определяемыми высокочастотным (малоразмерным) сканером.
Список литературы
1. Зондовая микроскопия для биологии и медицины. В.А.Быков и др. Сенсорные системы т 12, №1, 1998 г. с.99-121.
2. Сканирующая туннельная и атомно-силовая микроскопия в электрохимии поверхности. Данилов А.И. Успехи химии 64 (8), 1995 г. с.818-833.
3. Сканирующая туннельная микроскопия. B.C.Эдельман. ПТЭ №5, 1989 г. с.25-49.
4. D.W.Pole, W.Denk and M.Lanz. Appl.Phys.Lett. 44 (7), p.651 (1984 г.)
5. Решение о выдаче. Заявка №2002121274/28(023239).
6. Патент РФ №2124251.
7. Патент РФ №2152063.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С СИСТЕМОЙ АВТОМАТИЧЕСКОГО СЛЕЖЕНИЯ ЗА КАНТИЛЕВЕРОМ | 2002 |
|
RU2227333C1 |
| СПОСОБ СКАНИРОВАНИЯ ПОВЕРХНОСТИ ОБЪЕКТА С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2013 |
|
RU2538416C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ОПТИЧЕСКИМ МИКРОСКОПОМ | 2002 |
|
RU2244332C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ СРЕЗАНИЯ ТОНКИХ СЛОЕВ ОБЪЕКТА | 2004 |
|
RU2287129C2 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2005 |
|
RU2296387C1 |
Изобретение относится к измерительной технике, а именно к способам измерения с помощью сканирующего зондового микроскопа рельефа, линейных размеров и физических характеристик поверхности объектов в режимах сканирующего туннельного микроскопа, атомно-силового микроскопа, близкопольного оптического микроскопа и др. Объект устанавливают на первом пьезосканере. Над исследуемой поверхностью объекта помещают второй пьезосканер с зондом. Производят сближение зонда с поверхностью объекта. Используя взаимное перемещение обоих пьезосканеров, осуществляют сканирование. Оба пьезосканера включают в противофазе по каждой из координат сканирования. Используют два пьезосканера с эквивалентными активными элементами. Положение одного из пьезосканеров измеряют по каждой из координат сканирования. Величины перемещений определяют по результатам измерений. Сканирование осуществляют путем вращения зонда и образца вокруг соответствующих фиксированных центров. Технический результат - повышение разрешения способа сканирования, способ позволяет отключать, по крайней мере, одну из координат на одном из сканеров. 2 з.п. ф-лы, 4 ил.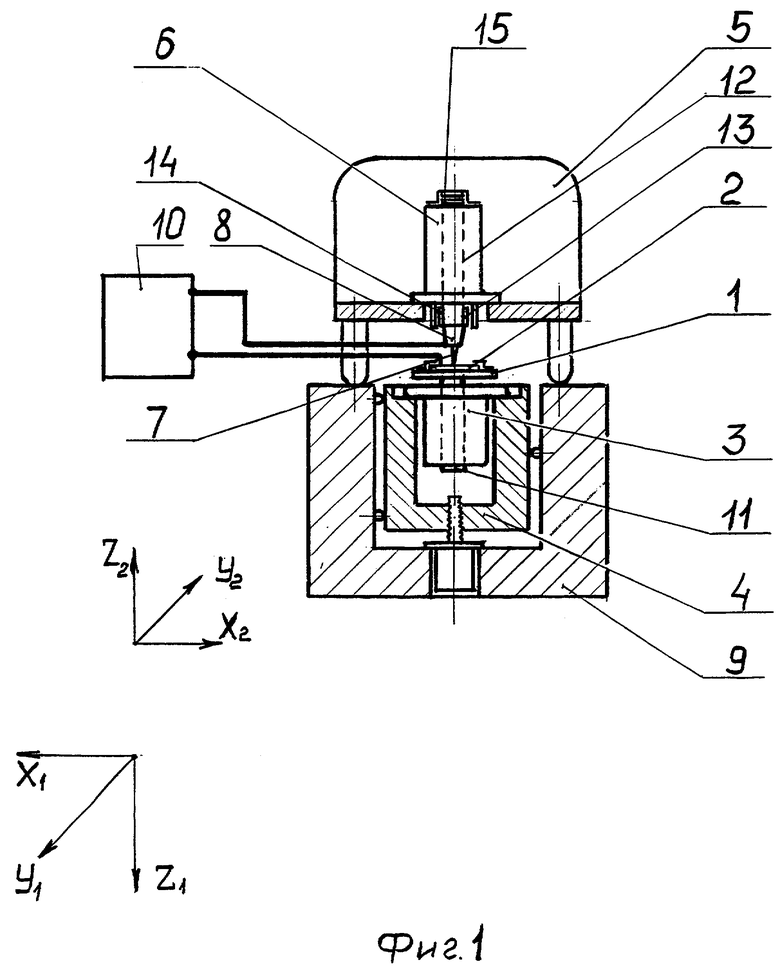
| RU 2002121274 A, 20.03.2004 | |||
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МЕХАНИЧЕСКОЙ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2003 |
|
RU2233490C1 |
| JP 10300758, 13.11.1998 | |||
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |

