Изобретение относится к пьезоэлектрическим устройствам преобразования электрического напряжения в механическое перемещение и может быть использовано в сканирующей зондовой микроскопии.
Известен позиционер (сканер), например, для сканирующего зондового микроскопа (СЗМ) с полем сканирования до 100×100×10 мкм3, построенные на основе пьезотрубок [1].
Недостатком этого устройства является малый диапазон перемещения, особенно по координате (Z), по сравнению с перемещением в плоскости (XY).
Известен также позиционер трехкоординатный, содержащий корпус, на котором установлены пьезобиморфы перемещения по координатам Х и Y, а также пьезотрубка для перемещения по координате Z, соединенные упругими стержнями с перемещаемым сердечником. Объект при этом закреплен на пьезотрубке [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства заключается в том, что диапазон его перемещений по координатам X, Y, Z не превышает 30×30×5 мкм3.
Второй недостаток - это низкая надежность, связанная с хрупкостью пьезокерамики, особенно в местах соединения с металлическими элементами конструкции.
Третий недостаток - использование дополнительно пьезотрубки для движения по координате Z, что усложняет конструкцию и также уменьшает ее надежность.
Технический результат предложенного решения заключается в увеличении диапазона сканирования и повышении надежности устройства.
Сущность изобретения заключается в том, что в позиционере трехкоординатном, состоящем из держателя объекта и корпуса, на котором закреплены первый привод по первой координате, содержащий, по меньшей мере, один первый биморфный элемент, соединенный посредством первого гибкого толкателя с подвижным элементом, второй привод по второй координате, содержащий, по меньшей мере, один второй биморфный элемент, при этом третий привод по третьей координате соединен третьим гибким толкателем с подвижным элементом, в качестве первого и второго биморфного элементов используют пакеты, каждый из которых содержит пьезоэлектрический диск (первый и второй), соединенный по плоскости с металлической мембраной (первой и второй), при этом третий привод выполнен в виде пакета, содержащего третий пьезоэлектрический диск, соединенный по плоскости с третьей металлической мембраной, и закрепленной на корпусе, причем держатель объекта установлен на подвижном элементе.
Существует вариант, в котором держатель объекта установлен на подвижном элементе посредством рычага.
Возможен вариант, в котором толкатели имеют различную жесткость.
Существует также вариант, в котором пьезоэлектрические диски и металлические мембраны имеют отверстия в зоне соединения их с гибкими толкателями, а металлические мембраны закреплены на корпусе накидными фланцами.
На фиг.1 изображен позиционер трехкоординатный.
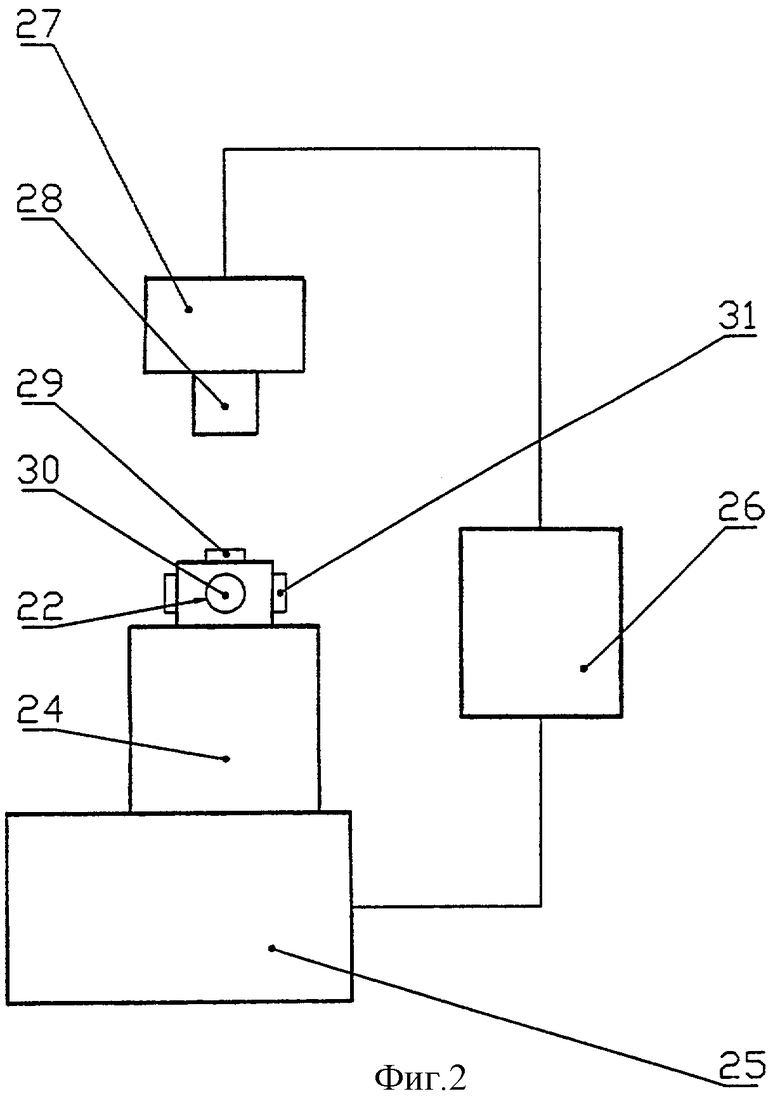
На фиг.2 изображен позиционер трехкоординатный в составе сканирующего зондового микроскопа.
Позиционер трехкоординатный содержит корпус 1, на котором закреплены первый 2, второй 3 и третий 4 приводы соответственно по первой X, второй Y и третьей Z координатам. Каждый привод выполнен в виде пакета (биморфного элемента), состоящего из пьезокерамического диска (первого 5, второго 6 и третьего 7), соединенного по плоскости с первой 8, второй 9 и третьей 10 металлическими мембранами. В качестве материалов мембран можно использовать бронзу или, например, нержавеющую сталь. Диски 5, 6, 7 с мембранами 8, 9, 10 могут быть соединены посредством клея, например «UHUplus endfest 300», а мембраны 8, 9, 10 с корпусом 1 - с использованием пайки, точечной сварки или накидных фланцев (на фиг.1 не показаны).
В дисках 5, 6 и 7 могут быть выполнены отверстия 11, а на мембранах 8, 9 и 10 закреплены переходники 12, 13 и 14, например, посредством пайки, точечной сварки или крепежных винтов (не показаны). В мембранах 8, 9 и 10 также могут быть выполнены отверстия (условно не показаны) для закрепления в них переходников. Переходники 12, 13 и 14 соединены с первым 15, вторым 16 и третьим 17 упругими толкателями, изготовленными из пружинного материала. Следует заметить, что, по меньшей мере, один толкатель может содержать упругие шарниры 18 и 19 для подбора оптимальной жесткости. На толкателях 15, 16 и 17 закреплен подвижный элемент 20, на котором, например, посредством рычага 21 установлен держатель 22 объекта 23. Детали 15, 16, 17, 18, 19, 20, 21 и 22 могут быть соединены посредством прессовых посадок, сварки, пайки, клея и т.п.
Следует заметить, что для выполнения точных характеристик позиционера необходимо соблюдать определенные соотношения жесткостных характеристик его подвижных элементов.
Обозначим изгибную жесткость пакетов (пьезоэлектрический диск - металлическая мембрана) для осей X, Y и Z - как К1, изгибную жесткость толкателей 15 и/или 16 соответственно по координатам Х и Y обозначим К2 (считаем их одинаковыми), изгибную жесткость толкателя 17 по координате Z обозначим К3, а продольную жесткость толкателей 15 и 16 обозначим К2*, К3* соответственно. Тогда для обеспечения перемещения, например, вдоль координаты Z необходимо, чтобы выполнялось соотношение

А для перемещения вдоль оси Х или Y необходимо, чтобы

В последнем случае толкатель 17 не изгибается, а изгибается привод 4 (пакет), на котором установлен толкатель 17, при этом точка его соединения с приводом 4 играет роль шарнира, вокруг которого поворачивается толкатель 17. В описываемой конструкции должно быть обеспечено соотношение

Это сделано для того, чтобы при резких перемещениях по координате Z при работе в СЗМ уменьшить неконтролируемые смещения в плоскости X, Y. Действительно, при условии, что толкатели 15 и 16 не изменяют своей длины, толкатель 17 должен был бы изгибаться под действием силы привода 4. Однако при выполнении условия (3) толкатель 17 не изгибается, а заставляет выгибаться приводы 2 и 3, двигаясь при этом прямолинейно.
Позиционер трехкоординатный 24 (фиг.2) может быть использован в составе сканирующего зондового микроскопа, содержащего систему предварительного сближения 25, блок управления 26 с держателем 27 зонда 28 и образец 29, закрепленный на держателе 22. Возможен вариант, в котором на держателе 22 может быть закреплен зонд, а на держателе 27 - образец (не показано). Кроме этого на корпусе 1 с целью крепления мембран могут быть установлены накидные фланцы 30 и 31.
Устройство работает следующим образом. При подаче управляющего напряжения на один из пьезокерамических дисков, например 5, он изменяет свои размеры, и мембрана 8 прогибается под действием сил с его стороны, двигая прикрепленный к ней толкатель 15. При этом толкатели 16 и 17 изгибаются и не препятствуют этому движению. Кроме того, мембраны 9 и 10 также слегка изгибаются, образуя гибкие безлюфтовые шарниры. Подвижный элемент 20 совершает сложное движение по координате X, близкое к прямолинейному. При подаче напряжений на другие диски соответствующие толкатели перемещаются пропорционально приложенным напряжениям независимо друг от друга, и элемент 20 совершает перемещение по координатам Y, Z. Перемещаемый держатель 22 движется вместе с концом рычага 21. При этом перемещение в горизонтальной плоскости больше, чем по вертикали, вследствие эффекта рычага. Одно плечо рычага это толкатель 17, другое плечо рычага - элемент 21.
В составе СЗМ (фиг.2) позиционер 24 перемещает образец 29 относительно зонда 28, благодаря чему можно осуществлять анализ поверхности образца и локальное воздействие на нее (подробнее работу СЗМ см. в [3, 4, 5]).
Использование пакетов, состоящих из пьезокерамических дисков и металлических мембран, увеличивает диапазон перемещения устройства при тех же его размерах (порядка 40 мм в диаметре) до 150×150×30 мкм2 и его надежность за счет присутствия в пакете металла. Кроме этого закрепление металлических мембран на корпусе, а также соединение их с переходниками более надежно, чем в прототипе, у которого это соединение осуществлено через хрупкую керамику.
Использование в устройстве по одному пакету по каждой координате увеличивает линейность позиционирования за счет исключения несогласованности перемещений пар пьезобиморфов как в прототипе.
Использование рычага в приводе увеличивает диапазон перемещения объекта и позволяет его регулировать.
Применение толкателей с различной жесткостью позволяет повысить точность перемещения при больших значениях за счет оптимизации взаимовлияния толкателей.
Выполнение отверстий в пьезоэлектрических дисках и металлических мембранах повышает надежность устройства за счет уменьшения их силового взаимодействия в процессе длительной эксплуатации, возникающего в результате пластической деформации дисков и мембран.
Использование накидных фланцев обеспечивает электробезопасность и снижает электрические наводки от пьезоэлектрических дисков.
ЛИТЕРАТУРА
1. Патент RU 2199171, 2003.
2. А.С. SU № 1453475, 1989.
3. Зондовая микроскопия для биологии и медицины. В.А. Быков и др., Сенсорные системы, т.12, № 1, 1998 г., с.99-121.
4. Сканирующая туннельная и атомносиловая микроскопия в электрохимии поверхности. Данилов А.И., Успехи химии, 64 (8), 1995 г., с.818-833.
5. Scanning tunneling microscope instrumentation. Y. Kyk, P. Sulverman. Rev. Sci. Instrum. 60 (1989), No.2, 165-180.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ ИЗМЕРЕНИЯ МАССЫ И ДИССИПАТИВНЫХ СВОЙСТВ | 2008 |
|
RU2407021C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| УСТРОЙСТВО ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 2013 |
|
RU2548163C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| ПЬЕЗОСКАНЕР МНОГОФУНКЦИОНАЛЬНЫЙ И СПОСОБ СКАНИРОВАНИЯ В ЗОНДОВОЙ МИКРОСКОПИИ | 2003 |
|
RU2248628C1 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| ПЬЕЗОСКАНЕР С ТРЕХКООРДИНАТНЫМ ПЛОСКОПАРАЛЛЕЛЬНЫМ ПЕРЕМЕЩЕНИЕМ В ПЛОСКОСТИ ОБЪЕКТА | 2002 |
|
RU2227363C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| УСТРОЙСТВО УГЛОВОГО СКАНИРОВАНИЯ | 2015 |
|
RU2628673C2 |
Изобретение относится к пьезоэлектрическим устройствам преобразования электрического напряжения в механическое перемещение и может быть использовано в сканирующей зондовой микроскопии. Сущность: позиционер состоит из держателя объекта и корпуса. На корпусе закреплены три привода, содержащие по меньшей мере один биморфный элемент, соединенный посредством первого гибкого толкателя с подвижным элементом. В качестве биморфных элементов используют пакеты, каждый из которых содержит пьезоэлектрический диск, соединенный по плоскости с металлической мембраной. Держатель объекта установлен на подвижном элементе. Держатель объекта может быть установлен на подвижном элементе посредством рычага. Толкатели имеют различную жесткость. Пьезоэлектрические диски и металлические мембраны имеют отверстия в зоне соединения их с гибкими толкателями. Технический результат: увеличение диапазона сканирования и повышение надежности. 3 з.п. ф-лы, 2 ил.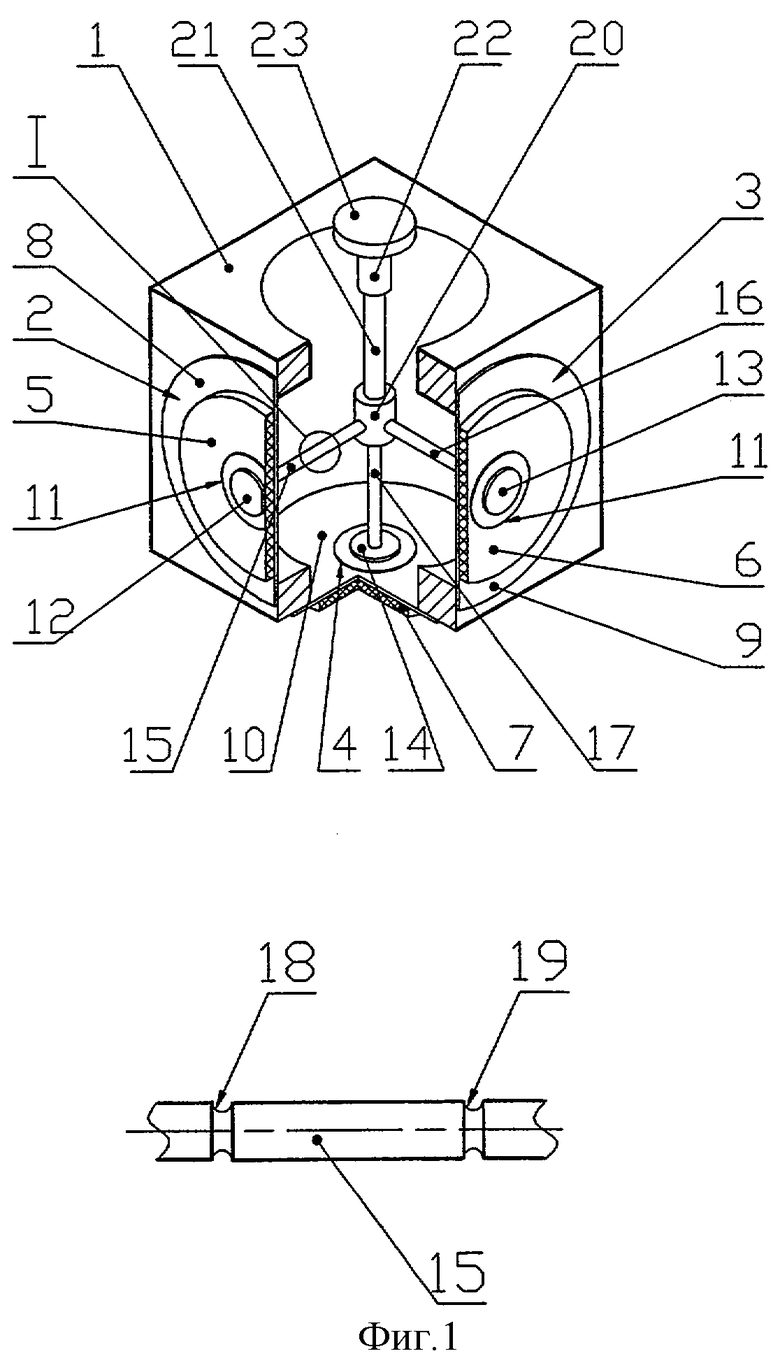
| Сканирующий туннельный микроскоп | 1987 |
|
SU1453475A1 |
| ШИРОКОПОЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2001 |
|
RU2210730C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство контроля фаз трансформатора | 1973 |
|
SU475564A1 |

