Предлагаемая система относится к технике контроля и тревожной сигнализации и может быть использована для оперативного контроля и управления транспортировкой особо важных и опасных грузов.
К особо важным и опасным грузам можно отнести экологически опасные грузы, промышленные и бытовые отходы при транспортировке их в места складирования и переработки, сильнодействующие ядовитые вещества, радиоактивные вещества, биологически опасные вещества, взрывчатые вещества, снаряды, мины, денежные средства при их транспортировке из банков к различным получателям, уникальные картины и другие материальные ценности.
Особо важные и опасные грузы, как правило, транспортируются специальными транспортными средствами (мусоровозами, контейнеровозами, инкассаторскими машинами и т.д.).
Известны системы контроля транспортировки экологически опасных грузов (авт. свид. СССР №№864.318, 924.735, 966.714, 1.117.672, 1.363.126, 1.650.018, 1.693.622, 1.730.648, 1.751,795, 1.755.310, 1.764.070; патенты РФ №№2.032.220, 2.032.227, 2.053.561, 2.058.592, 2.173.889, 2.271.038, 2.312.399, 2.403.623, 2.414.004; патенты США №№3.636.560, 3.713.125. 4.023.163, 4.742.338, 4.751.499; патенты Германии №№2.536.949, 2.616.603, 2.700.690; патент Великобритании №1.267.040; патенты Франции №№2.199.151, 2.415.840 и другие).
Из известных систем наиболее близкой к предлагаемой является «Территориальная система контроля транспортировки экологически опасных грузов» (патент РФ №2.403.623, G08B 25/10, 2009), которая и выбрана в качестве базового объекта.
Указанная система обеспечивает повышение экологической безопасности жилых и промышленных объектов путем безопасного и контролируемого вызова экологически опасных отходов жизнедеятельности человека и промышленных отходов в местах складирования и переработки. Известная система также обеспечивает повышение избирательности, помехоустойчивости и достоверности обмена дискретной информации между пунктом управления и специальными транспортными средствами.
Это достигается реализацией дуплексного метода радиосвязи с использованием двух частей w1, w2, сложных сигналов с фазовой манипуляцией и подавлением ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам.
Однако полное подавление ложных сигналов (помех), принимаемых по первому и второму зеркальным каналам на частотах wз1 и wз2, возможно только при идентичности приемных каналов. Реальные усилители первой промежуточной частоты и другие элементы, входящие в состав каналов, имеют отличающиеся характеристики. Поэтому полного подавления ложных сигналов (помех), принимаемых по зеркальным каналам на частотах wз1 и wз2, не происходит, и снижается избирательность, помехоустойчивость и достоверность обмена дискретной информацией между пунктом управления и специальными транспортными средствами.
Технической задачей изобретения является повышение избирательности, помехоустойчивости и достоверности обмена дискретной информацией между пунктом управления и специальными транспортными средствами путем полного подавления ложных сигналов (помех), принимаемых по зеркальным каналам на частотах wз1 и wз2.
Поставленная задача решается тем, что территориальная система контроля транспортировки особо важных и опасных грузов, содержащая, в соответствии с ближайшим аналогом, на каждом специальном транспортном средстве последовательно связанные радиостанцию, абонентское устройство кодирования и устройство регистрации, а также датчик координатной информации, датчик характера груза и сигнальные датчики, подключенные к абонентскому устройству кодирования, на пункте управления последовательно связанные радиостанцию, первый процессор и рабочее место оператора, к выходу первого процессора последовательно подключены блок сравнения, устройство кодирования, рабочее место оператора и второй процессор, выход которого соединен с вторым входом блока сравнения, при этом радиостанции специальных транспортных средств и пункта управления связаны между собой радиоканалами, каждая радиостанция содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, третий смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель второй промежуточной частоты, усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, и первый смеситель, второй вход которого соединен с первым выходом первого гетеродина, последовательно подключенные к второму выходу первого гетеродина первый фазовращатель на 90° и второй смеситель, второй вход которого соединен с выходом дуплексера, последовательно включенные первый усилитель первой промежуточной частоты, сумматор, второй вход которого через второй фазовращатель на 90° соединен с выходом второго усилителя первой промежуточной частоты, первый перемножитель, второй вход которого соединен с выходом дуплексера, первый узкополосный фильтр, первый амплитудный детектор, ключ, второй вход которого соединен с выходом сумматора, второй перемножитель, второй вход которого соединен с выходом второго гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с вторым выходом первого гетеродина, второй вход фазового манипулятора радиостанции, размещенной на пункте управления, соединен с первым процессором, а выход фазового детектора, подключен к первому процессору, второй вход фазового манипулятора радиостанции, размещенной на каждом специальном транспортном средстве, соединен с абонентским устройством кодирования, а выход фазового детектора подключен к абонентскому устройству кодирования, частоты wг1 и wг2 первого и второго гетеродинов разнесены на значения первой промежуточной частоты wпp1:
wг1-wг2=wпp1,
радиостанция, размещенная на пункте управления, выполнена с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте
w1=wг1=wпp2,
где wпр2 - вторая промежуточная частота, а приема - на частоте
w2=wг2=wпp3,
где wпр3 - третья промежуточная частота,
а радиостанция, размещенная на каждом специальном транспортном средстве, выполнена с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте w2, а приема - на частоте w1, при этом на специальных транспортных средствах размещены идентификационные метки, а на контрольных постах, через которые следуют специальные транспортные средства, перевозящие особо важные и опасные грузы, установлены сканирующие устройства, каждая идентификационная метка выполнена в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой приемопередающей антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой приемопередающей антенной, каждое сканирующее устройство выполнено в виде последовательно включенных генератора высокой частоты, усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, усилителя высокой частоты, фазового детектора, второй вход которого соединен с выходом генератора высокой частоты, и компьютера, последовательно включенных гетеродина, смесителя, второй вход которого соединен с выходом генератора высокой частоты, усилителя третьей промежуточной частоты, фазового манипулятора, второй вход которого соединен с компьютером, усилителя мощности и приемопередающей антенны, отличается от ближайшего аналога тем, что каждая радиостанция снабжена двумя регулируемыми фазовращателями, двумя инверсными усилителями, калибратором, вторым и третьим узкополосными фильтрами, вторым и третьим амплитудными детекторами, блоком вычитания, вторым фазовым детектором и двумя фильтрами нижних частот, причем к выходу первого смесителя последовательно подключены первый регулируемый фазовращатель, второй вход которого соединен с выходом калибратора, первый усилитель первой промежуточной частоты, второй узкополосный фильтр, второй фазовый детектор, первый фильтр нижних частот и первый инверсный усилитель, два выхода которого соединены с третьими входами первого и второго регулируемых фазовращателей соответственно, к выходу второго смесителя последовательно подключены второй регулируемый фазовращатель, второй вход которого соединен с выходом калибратора, второй усилитель первой промежуточной частоты и третий узкополосный фильтр, выход которого соединен с вторым входом второго фазового детектора, к выходу второго узкополосного фильтра последовательно подключены второй амплитудный детектор, блок вычитания, второй вход которого через третий амплитудный детектор соединен с выходом третьего узкополосного фильтра, второй фильтр нижних частот и второй инверсный усилитель, два выхода которых соединены с вторыми входами первого и второго усилителей первой промежуточной частоты соответственно, частота wк калибратора отличается от первой промежуточной частоты wпp1 на незначительную величину Δw.
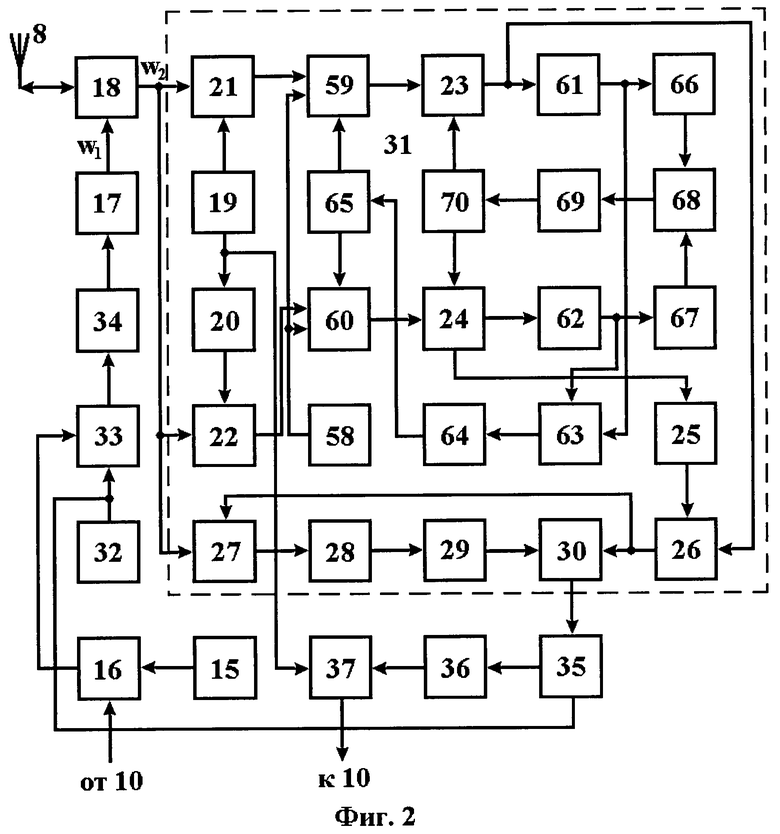
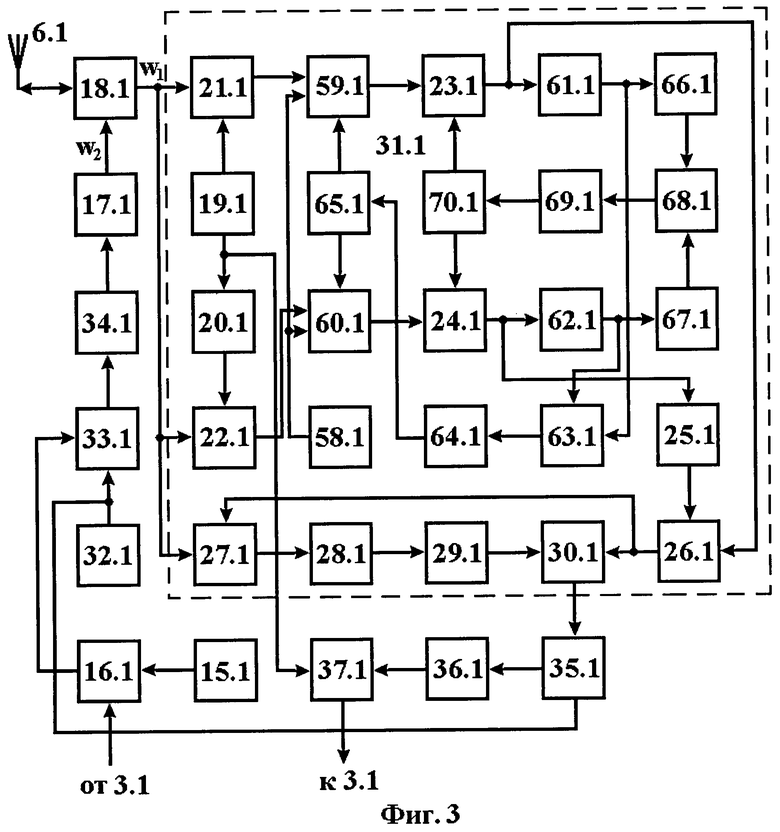
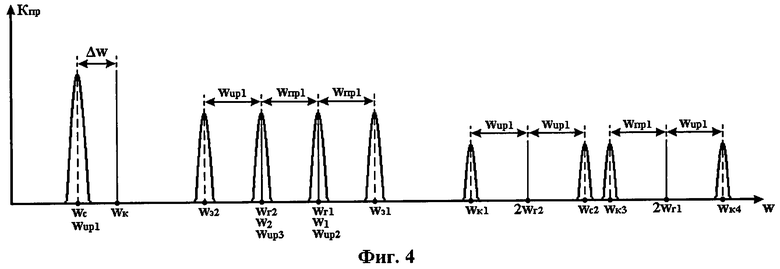
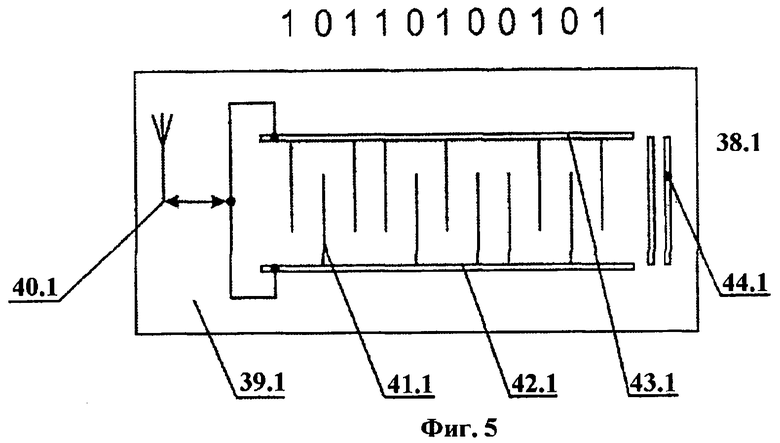
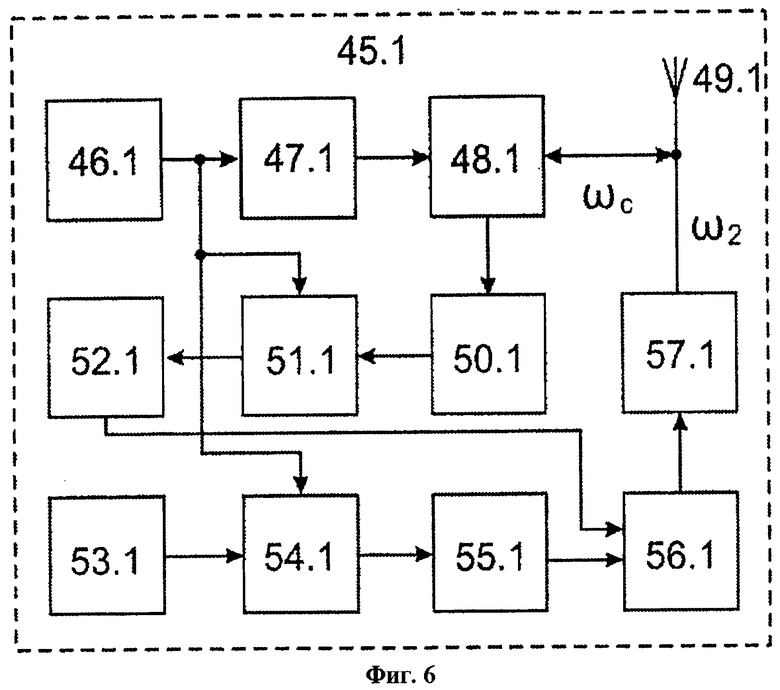
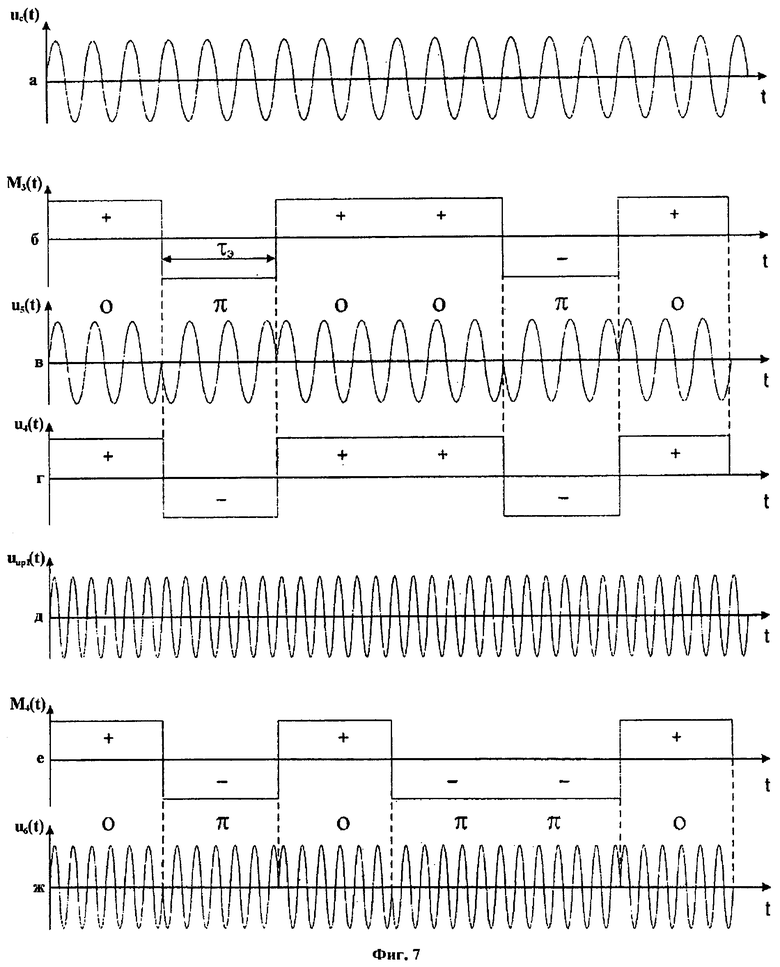
Структурная схема предлагаемой системы представлена на фиг.1. Структурная схема радиостанции пункта управления представлена на фиг.2. Структурная схема радиостанции специального транспортного средства представлена на фиг.3. Частотная диаграмма, поясняющая преобразование сигналов по частоте, изображена на фиг.4. Электрическая схема идентификационной метки показана на фиг.5. Структурная схема сканирующего устройства представлена на фиг.6. Временные диаграммы, поясняющие работу сканирующего устройства, показаны на фиг.7.
Оборудование 1.i, размещенное на каждом специальном транспортном средстве, содержит последовательно связанные радиостанцию 5.i с приемопередающей антенной 6.i, абонентское устройство 3.i кодирования и устройство 4.i регистрации (i=1, 2, …, n), а также датчик 2.1 координатной информации, датчик 2.2 характера груза и специальные датчики 2.3, подключенные к абонентскому устройству 3.i кодирования.
Оборудование, размещенное на пункте управления 7, содержит последовательно связанные радиостанцию 9 с приемопередающей антенной 8, первый процессор 10 и рабочее место 13 оператора, к выходу первого процессора 10 последовательно подключены блок 11 сравнения, устройство 12 кодирования, рабочее место 13 оператора и второй процессор 14, выход которого соединен с вторым входом блока 11 сравнения.
Каждая радиостанция 9 (5.1) содержит последовательно включенные генератор 15 (15.1) высокой частоты, фазовый манипулятор 16 (16.1), третий смеситель 33 (33.1), второй вход которого соединен с выходом второго гетеродина 32 (32.1), усилитель 34 (34.1) второй промежуточной частоты, усилитель 17 (17.1) мощности, дуплексер 18 (18.1), вход-выход которого связан с приемопередающей антенной 8 (6.1), первый смеситель 21 (21.1), второй вход которого соединен с первым выходом первого гетеродина 19 (19.1), первый регулируемый фазовращатель 59 (59.1), второй вход которого соединен с выходом калибратора 58 (58.1), первый усилитель 23 (23.1) первой промежуточной частоты, сумматор 26 (26.1), первый перемножитель 27 (27.1), второй вход которого соединен с выходом дуплексера 18 (18.1), узкополосный фильтр 28 (28.1), амплитудный детектор 29 (29.1), ключ 30 (30.1), второй вход которого соединен с выходом сумматора 26 (26.1), второй перемножитель 35 (35.1), второй вход которого соединен с выходом второго гетеродина 32 (32.1), полосовой фильтр 36 (36.1) и фазовый детектор 37 (37.1), второй вход которого соединен с вторым выходом первого гетеродина 19 (19.1). К выходу первого усилителя 23 (23.1) первой промежуточной частоты последовательно подключены второй узкополосный фильтр 61 (61.1), второй фазовый детектор 63 (63.1), второй вход которого соединен с выходом третьего узкополосного фильтра 62 (62.1), первый фильтр 64 (64.1) нижних частот и первый инверсный усилитель 65 (65.1), два выхода которого соединены с третьим входом первого 59 (59.1) и второго 60 (60.1) регулируемых фазовращателей соответственно. К второму выходу первого гетеродина 19 (19.1) последовательно подключены первый фазовращатель 20 (20.1) на 90°, второй смеситель 22 (22.1), второй вход которого соединен с выходом дуплексера 18 (18.1), второй регулируемый фазовращатель 60 (60.1), второй вход которого соединен с выходом калибратора 58 (58.1), второй усилитель 24 (24.1) первой промежуточной частоты, третий узкополосный фильтр 62 (62.1), третий амплитудный детектор 67 (67.1), блок 68 (68.1) вычитания, второй вход которого через второй амплитудный детектор 66 (66.1) соединен с выходом второго узкополосного фильтра 61 (61.1), второй фильтр 69 (69.1) нижних частот и второй инверсный усилитель 70 (70.1), два выхода которого соединены с вторыми входами первого 23 (23.1) и второго 24 (24.1) усилителей первой промежуточной частоты соответственно. Второй вход сумматора 26 (26.1) через второй фазовращатель 25 (25.1) на 90° соединен с выходом второго усилителя 24 (24.1) первой промежуточной частоты. Причем второй вход фазового манипулятора 16 радиостанции, размещенной на пункте 7 управления, соединен с первым процессором 10, а выход фазового детектора 37 подключен к первому процессору 10, второй вход фазового манипулятора 16.1 радиостанции, размещенный на каждом специальном транспортном средстве, соединен с абонентским устройством 3.1 кодирования, а выход фазового детектора 37.1 подключен к абонентскому устройству 3.1 кодирования.
Первый гетеродин 19 (19.1), фазовращатели 20 (20.1) и 25 (25.1) на 90°, смесители 21 (21.1) и 22 (22.1), усилители 23 (23.1) и 24 (24.1) первой промежуточной частоты, сумматор 26 (26.1), перемножитель 27 (27.1), узкополосный фильтр 28 (28.1), амплитудный детектор 29 (29.1), ключ 30 (30.1), регулируемые фазовращатели 59 (59.1) и 60 (60.1), калибратор 58 (58.1), второй 61 (61.1) и третий 62 (62.1) узкополосные фильтры, второй фазовый детектор 63 (63.1), второй 64 (64.1) и третий 69 (69.1) фильтры нижних частот, первый 65 (65.1) и второй 70 (70.1) инверсные усилители, второй 66 (66.1) и третий 67 (67.1) амплитудные детекторы, блок 68 (68.1) вычитания образуют универсальный преобразователь 31 (31.1) частоты.
Частоты wг1 и wг2 гетеродинов 19 (32.1) и 32 (19.1) разнесены на значение первой промежуточной частоты wпр1
wг1-wг2=wпр1.
Радиостанция 9, размещенная на пункте 7 управления, излучает сложные сигналы с фазовой манипуляцией на частоте
w1=wг1=wпр2,
где wпр2 - вторая промежуточная частота, а принимает на частоте
w2=wг2=wпр3,
где wпр3 - третья промежуточная частота,
а радиостанция 5.1, размещенная на каждом специальном транспортном средстве, наоборот, излучает сложные сигналы с фазовой манипуляцией на частоте w2, а принимает на частоте w1 (фиг.4).
Идентификационная метка 38.i выполнена в виде пьезокристалла 39.i с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой приемопередающей антенной 40.i, и набором отражателей 44.i. Встречно-штыревой преобразователь поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 41.i, шины 42.i и 43.i, которые соединяют электроды каждой из гребенок между собой. Шины в свою очередь связаны с микрополосковой приемопередающей антенной 40.i (i=1, 2, …, n).
Сканирующее устройство 45.j выполнено в виде последовательно включенного генератора 46.j высокой частоты, усилителя 47.j мощности, дуплексера 48.j, вход-выход которого связан с приемопередающей антенной 49.j, усилителя 50.j высокой частоты, фазового детектора 51.j, второй выход которого соединен с выходом генератора 46.j высокой частоты, и компьютера 52.j, последовательно включенных гетеродина 53.j, смесителя 54.j, второй вход которого соединен с выходом генератора 46.j высокой частоты, усилителя 55.j третьей промежуточной частоты, фазового манипулятора 56.j, второй вход которого соединен с компьютером 52.j, усилителя 57.j мощности и приемопередающей антенны 49.j (j=1, 2, …, m).
Предлагаемая система работает следующим образом.
Чувствительными элементами системы являются датчик 2.1 координатной информации, датчик 2.2 характера груза, сигнальные датчики 2.3 (2.i) и идентификационные метки 38.i (i=1, 2, …, n), устанавливаемые на каждом специальном транспортном средстве.
Датчик 2.1 координатной информации (навигационный датчик) является неотъемлемым элементом глобальной радионавигационной спутниковой системы «Глонасс» (РФ) или «Навстар» (США), выполняется съемным и выпускается промышленностью в стандартной упаковке (прибор SDS-221). С помощью указанной радионавигационной системы обеспечиваются определенные географические координаты местоположения (с точностью до 1 метра) и вектора скорости специального транспортного средства. Датчик каждую секунду, в момент смены секунды единого времени, передает координатную информацию в абонентское устройство 3.i кодирования.
Датчик 2.2 характера груза - это прибор для чтения информации о грузе. Маркером груза могут быть штриховой код, перфораторный код, электронный код и т.д. Информация о характере груза также передается в абонентское устройство 3.i кодирования.
Сигнальные датчики 2.3 - это контакты и кнопки, которые фиксируют, например, поднятие-опускание контейнера при погрузке, распечатывание опломбированного груза, открывание-закрывание дверей кабины, капота, топливного бака и т.д. на специальном транспортном средстве.
К основным характеристикам идентификационной метки можно отнести следующее:
- частотный диапазон - 900…920 МГц;
- дальность действия - десятки метров;
- количество кодовых комбинаций - до 107;
- тип излучаемого сигнала - гармоническое колебание;
- тип отраженного (переизлучаемого) сигнала - широкополосный сигнал с фазовой манипуляцией (база сигнала β=Δfc·Tc=200…1000, Δfc - ширина сектора, Tc - длительность сигнала);
- габариты - 8×1,5×5 мм;
- срок службы - не менее 20 лет;
- потребляемая мощность - 0 Вт.
Идентификационная ПАВ-метка размещается на специальном транспортном средстве в зоне прямой видимости антенн сканирующего устройства (на лобовом стекле, бампере, номерном знаке, днище и т.д.).
При выезде специального транспортного средства на линию водителю вместе с путевым листом под расписку выдается датчик 2.1 координатной информации, который вставляется в заранее оборудованное в специальном транспортном средстве место. После включения датчика происходит его автоматическая инициализация, и он связывается с данным специальным транспортным средством. Эта связь осуществляется передачей особого параметра - бортового номера, однозначно определяющего данный автомобиль. После того как автомобиль отправился на линию, система автоматически осуществляет запись в файл базы данных его географических координат на местности. Период обновления информации в файле базы данных равен установленному в датчике периоду передачи сигнала.
Оператор может выбрать для просмотра то или иное специальное транспортное средство, ориентируясь на гаражный номер или другие характеристики специального транспортного средства. После выбора специального транспортного средства на экране компьютера рабочего места оператора появится карта местности с привязанным к ней пройденным маршрутом специальным транспортным средством в виде линии. Возможно изменение масштаба карты оператором для детализации маршрута специального транспортного средства. Если поместить курсор мыши на линию маршрута, то на экране появляются текущие на тот момент времени координатная информация, общий километраж, количество топлива в баке, скорость специального транспортного средства и т.д.
Устройство 3.1 кодирования получает данные состояния (показания) датчиков 2.1, 2.2, и 2.3, кодированные сообщения передаются на хранение в устройство 4.1 регистрации.
С заданным периодом времени Т процессор 10 с пункта 7 управления через радиостанцию 9 дает сообщение - запрос в адрес очередного по порядку последовательного опроса специального транспортного средства на выдачу массива данных, накопленных в устройстве 4.1 регистрации.
Для этого генератором 15 высокой частоты формируется гармоничное колебание
uc1(t)=Uc1·Cos(wct+φc1), 0≤t≤Tc1,
которое поступает на первый вход фазового манипулятора 16, на второй вход которого подается модулирующий код M1(t) с выхода первого процессора 10. Модулирующий код M1(t) соответствует бортовому номеру запрашиваемого транспортного средства. На выходе фазового манипулятора 16 формируется сложный сигнал с фазовой манипуляцией (ФМн)
u1(t)=Uc1·Cos[wct+φк1(t)+φc1], 0≤t≤Tc1,
где φк1(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t),
который поступает на первый вход третьего смесителя 33, на второй вход которого подается напряжение второго гетеродина 32
uг2(t)=Uг2·Cos(wг2t+φг2).
На выходе третьего смесителя 33 образуются напряжения комбинационных частот. Усилителем 34 выделяется напряжение второй промежуточной (суммарной) частоты
uпр2(t)=Uпр2·Cos[wпр2t+φк1(t)+φпр2], 0≤t≤Tc1,
где 
wпр2=wг2+wc=w1 - вторая промежуточная (суммарная) частота (фиг.4);
φпр2=φг2+φс1.
Это напряжение после усиления в усилителе 17 мощности через дуплексер 18 поступает в приемопередающую антенну 8, излучается в эфир на частоте w1=wпр2, улавливается приемопередающей антенной 6.1 специального транспортного средства и через дуплексер 18.1 поступает на вход универсального преобразователя 31.1 частоты. Указанный преобразователь обеспечивает подавление ложных сигналов (помех), принимаемых по второму зеркальному каналу на wз2, по первому wк1 и второму wк2 комбинационным каналам. Причем для подавления ложных сигналов (помех), принимаемых по второму зеркальному каналу на частоте wз2, используется «внешнее кольцо», состоящее из гетеродина 19.1, фазовращателей 20.1 и 25.1 на 90°, смесителей 21.1 и 22.1, усилителей 23.1 и 24.1 первой промежуточной частоты и сумматора 26.1 и реализующее фазокомпенсационный метод. Для подавления ложных сигналов (помех), принимаемых по первому и второму комбинационным каналам на частотах wк1 и wк2, используется «внутреннее кольцо», состоящее из перемножителя 27.1, узкополосного фильтра 28.1, амплитудного детектора 29.1, ключа 30.1, и реализующее метод узкополосной фильтрации.
Подавление ложных сигналов (помех), принимаемых по второму зеркальному каналу на частоте wз2, основано на использовании двух трактов, в которых ложные сигналы (помехи) преобразуются с помощью гетеродина 19.1 в более низкую одинаковую для обоих трактов, первую промежуточную частоту wup1, усиливаются, а затем суммируются. Причем в одном из трактов принимаемые ложные сигналы (помехи) сдвигаются по фазе на 90°, сдвигается по фазе на 90° и напряжение uг2(t). Это приводит к тому, что ложные сигналы (помехи), принимаемые по второму зеркальному каналу на частоте wз2, на выходе сумматора 26.1 оказываются в противофазах. Следовательно, при суммировании указанные ложные сигналы (помехи) подавляются.
Однако их полное подавление возможно только при идентичности приемных трактов. Реальные усилители 23.1 и 24.1 первой промежуточной частоты, входящие в состав приемных трактов, имеют отличающиеся характеристики. Различия увеличиваются за счет других элементов, входящих в состав приемных трактов.
Для устранения неидентичности приемных трактов вводится комплексная (амплитудно-фазовая) система идентификации, которая использует гармонический калибровочный сигнал, получаемый от отдельного генератора (калибратора) 58.1, частота wк которого отличается от первой промежуточной частоты wup1 на некоторую величину Δw (фиг.4). При малой величине Δw калибровочный сигнал несет информацию о идентичности приемных трактов на первой промежуточной частоте wup1 в силу корреляции близких значений частотных характеристик.
На входы первого 23.1 и второго 24.1 усилителей первой промежуточной частоты через регулируемые фазовращатели 59.1 и 60.1 соответственно с выхода калибратора 58.1 поступает калибровочный гармонический сигнал
uк(t)=Uк·Cos(wкt+φк),
частота wк которого отличается от первой промежуточной частоты wup1 на незначительную величину Δw (фиг.4). На выходе усилителей 23.1 и 24.1 первой промежуточной частоты калибровочные сигналы выделяются узкополосными фильтрами 61.1 и 62.1 и после детектирования в амплитудных детекторах 66.1 и 67.1 поступают на входы блока 68.1 вычитания системы амплитудной идентификации. При неравенстве модулей коэффициентов передачи приемных трактов (к1≠к2) на частоте wк на выходе блока 68.1 вычитания появляется напряжение (положительное или отрицательное), которое через фильтр 69.1 нижних частот и инверсный усилитель 70.1 воздействует на управляющие входы усилителей 23.1 и 24.1 первой промежуточной частоты, изменяя их коэффициенты передачи к1 и к2 таким образом, что выходное напряжение блока 68.1 вычитания стремится к нулю. При этом коэффициенты передачи усилителей 23.1 и 24.1 первой промежуточной частоты оказываются практически одинаковыми на частоте wк калибровочного сигнала (к1=к2=к).
С выходов узкополосных фильтров 61.1 и 62.1 калибровочные сигналы поступают на систему фазовой идентификации, состоящую из фазового детектора 63.1, фильтра 64.1 нижних частот, инверсного усилителя 65.1 и двух регулируемых фазовращателей 59.1 и 60.1.
При наличии фазовой неидентичности приемных трактов на выходе фазового детектора 63.1 образуется напряжение (положительное или отрицательное), которое через фильтр 64.1 нижних частот и инверсный усилитель 65.1 воздействует на управляющие входы регулируемых фазовращателей 59.1 и 60.1, изменяя фазовые сдвиги калибровочных сигналов так, что выходное напряжение фазового детектора 63.1 стремится к нулю. Так достигается фазовая идентификация приемных трактов.
Наличие сильной корреляции между модулями коэффициентов передачи и между их аргументами на частотах wup1 и wк позволяет утверждать практическое равенство модулей коэффициентов передачи и равенство их аргументов на первой промежуточной частоте.
На выходе сумматора 26.1 образуется суммарное напряжение
uΣ2(t)=UΣ1·Cos[wпр1t+φк1(t)+φпр1], 0≤t≤Tc1,
где wпр1=w1-wг2 - первая промежуточная (разностная) частота;
wг2 - частота гетеродина 19.1,
которое через открытый ключ 30.1 поступает на первый вход второго перемножителя 35.1, на второй вход которого подается напряжение гетеродина 32.1
uг1(t)=Uг1·Cos(wг1t+φг1).
На выходе перемножителя 35.1 образуется напряжение
u2(t)=U2·Cos[wг2t-φk1(t)+φг2], 0≤t≤Tc1,
где 
wг2=wпр3=wг1-wпр1 - третья промежуточная частота,
которая выделяется полосовым фильтром 36.1 и поступает на первый (информационный) вход фазового детектора 37.1, на второй вход которого подается напряжение гетеродина 19.1
uг2(t)=Uг2·Cos(wг2t+φг2).
На выходе фазового детектора 37.1 образуется низкочастотное напряжение
uн1(t)=Uн1·Cosφк1(t).
где 
пропорционально модулирующему коду M1(t).
Это напряжение поступает в устройство 3.1 кодирования и, если оно соответствует бортовому номеру специального транспортного средства, запрашиваемого с пункта 7 управления, то массив данных, накопленных в устройстве 4.1 регистрации, в виде модулирующего кода M2(t) поступает на второй вход фазового манипулятора 16.1. На первый вход указанного фазового манипулятора подается гармоническое колебание с выхода генератора 15.1 высокой частоты.
uc2(t)=Uc2·Cos(wct+φc2], 0≤t≤Tc2.
На выходе фазового манипулятора 16.1 формируется сложный сигнал с фазовой манипуляцией (ФМн)
u3(t)=Uc2·Cos[wct+φк2(t)+φс2], 0≤t≤Tc2,
где φк2(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M2(t),
который поступает на первый вход смесителя 33.1, на второй вход которого подается напряжение гетеродина 32.1
uг1(t)=Uг1·Cos(wг1t+φг1).
На входе смесителя 33.1 образуются напряжения комбинационных частот. Усилителем 34.1 выделяется напряжение третьей промежуточной (разностной) частоты
uпр3(t)=Uпр3·Cos[wпр3t-φк2(t)+φпр3], 0≤t≤Tc2,
где 
wпр3=wг1-wc - вторая промежуточная (суммарная) частота (фиг.4);
φпр3=φc1-φг1.
Это напряжение после усиления в усилителе 17.1 мощности через дуплексер 18.1 поступает в приемопередающую антенну 6.1, излучается ею в эфир на частоте w2=wпр3, улавливается приемопередающей антенной 8 пункта 7 управления и через дуплексер 18 поступает на вход универсального преобразователя 31 частоты. Указанный преобразователь обеспечивает подавление ложных сигналов (помех), принимаемых по первому зеркальному каналу на частоте wз1, по третьему wк3 и четвертому wк4 комбинационным каналам. Причем для подавления ложных сигналов (помех), принимаемых по первому зеркальному каналу на частоте wз1, используется «внешнее кольцо», состоящее из гетеродина 19, фазовращателей 20 и 25 на 90°, смесителей 21 и 22, усилителей 23 и 24 первой промежуточной частоты, сумматора 26, и реализующее фазокомпенсационный метод.
Для полного подавления ложных сигналов (помех), принимаемых по первому зеркальному каналу на частоте wз1, используется комплексная (амплитудно-фазовая) система идентификации, состоящая из калибратора 58, регулируемых фазовращателей 59 и 60, инверсных усилителей 65 и 70, узкополосных фильтров 61 и 62, амплитудных детекторов 66 и 67, блока 68 вычитания, фазового детектора 63, фильтров 64 и 69 нижних частот.
Работает указанная система так же, как и система, описанная выше.
Для подавления ложных сигналов (помех), принимаемых по третьему и четвертому комбинационным каналам на частотах wк3 и wк4, используется «внутреннее кольцо», состоящее из перемножителя 27, узкополосного фильтра 28, амплитудного детектора 29, ключа, 30 и реализующее метод узкополосной фильтрации.
На выходе сумматора 26 образуется суммарное напряжение
uΣ2(t)=UΣ1·Cos[wпр1t-φк2(t)+φпр1], 0≤t≤Tc2,
где wпр1=wг1-w2 - первая промежуточная (разностная) частота,
которое через открытый ключ 30 поступает на первый вход перемножителя 35, на второй вход которого подается напряжение uг2(t) гетеродина 32. На входе перемножителя 35 образуется напряжение
u4(t)=UΣ2·Cos[wг1t-φк2(t)+φг1], 0≤t≤Tc2,
где 
wг1=wпр1+wг2,
которое выделяется полосовым фильтром 36 и поступает на первый (информационный) вход фазового детектора 37, на второй (опорный) вход которого подается напряжение гетеродина 19
uг1(t)=Uг1·Cos(wг1t+φг1).
На выходе фазового детектора 37 образуется низкочастотное напряжение
uн2(t)=Uн2·Cosφк2(t),
где 
пропорциональное модулирующему коду M2(t). Это напряжение поступает в первый процессор 10, который осуществляет разделение модулирующей функции M2(t) (кодограммы) на отдельные блоки данных по следующим признакам:
- номер специального транспортного средства;
- данные географических координат специального транспортного средства;
- данные наличия особо важного и опасного груза на нем;
- данные скорости движения;
- наличие аварийных сигналов, и передает их в блок 11 сравнения, куда поступают также заданные и рассчитанные с помощью процессора 14 данные. Результаты сравнения кодируются кодирующим устройством 12 в соответствующее сообщение, которое поступает на рабочее место 13 оператора:
- специальное транспортное средство находится на разрешенном (запрещенном) маршруте (участке) движения;
- складирование груза произведено на разрешенном (не разрешенном) участке (где именно) контролируемой территории;
- разгрузка особо важного и опасного груза произведена в разрешенном (не разрешенном) месте;
- скорость движения специального транспортного средства соответствует (не соответствует) заданной на данном участке маршрута;
- показания датчика аварийного сигнала в норме или поступил сигнал «Тревога».
Разрешенный безопасный маршрут движения выбирается процессором 14 на основе данных о начальном и конечном пунктах движения специального транспортного средства и выдается в форме маршрутного путевого листа водителю. Эти же данные через процессор 10 поступают в блок 11 сравнения.
Оператор рабочего места 13 по мере поступления данных со специальных транспортных средств осуществляет контроль за выполнением нормативных документов и при необходимости по каналам голосовой связи дает команду на специальное транспортное средство по корректировке действий специальных транспортных средств, а при поступлении сигнала «Тревога» дает голосовую команду мобильным группам быстрого реагирования о прибытии в конкретное место для ликвидации чрезвычайной ситуации.
Для повышения достоверности контроля транспортировки особо важных и опасных грузов используются идентификационные метки, размещенные на специальных транспортных средствах, и контрольные посты, устанавливаемые на маршрутах движения специальных транспортных средств, например на въезде и выезде из парка и в других контрольных точках.
Контрольные посты снабжаются сканирующими устройствами 45.j (j=1, 2,…, m, где m - количество контрольных постов).
Генератором 46.1 высокой частоты формируется высокочастотное колебание (фиг.7,а)
uc(t)=Uc·Cos(wct+φc), 0≤t≤Tc,
где Uc, wc, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое усиливается по мощности в усилителе 47.1 мощности и через дуплексер 48.1 поступает в приемопередающую антенну 49.1 и излучается ею в эфир.
Идентификационные ПАВ-метки размещаются на специальном транспортном средстве в зоне прямой видимости приемопередающей антенны 49.1 сканирующего устройства 45.1 (на лобовом стекле, бампере, номерном знаке, днище и т.д.).
Гармоническое колебание uc(t) улавливается микрополосковой приемопередающей антенной 40.1 идентификационной ПАВ-метки 38.1 и поступает на вход встречно-штыревого преобразователя (ВШП), где преобразуется в акустическую волну.
Последняя распространяется по поверхности пьезокристалла 39.1, отражается от отражателей 44.1 и опять преобразуется в электромагнитный сигнал с фазовой манипуляцией (ФМн) (фиг.7,в)
u5(t)=U5·Cos[wct+φк(t)+φc], 0≤t≤Tc,
где φк(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М3(1) (фиг.7, б), причем φк(t)=const при Kτэ<t<(к+1)τэ и может изменяться скачками при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2,…, N-1),
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc=τэ·N).
При этом внутренняя структура сформированного ФМн-сигнала определяется модулирующим кодом М3(t), который, в свою очередь, определяется топологией встречно-штыревого преобразователя, имеет индивидуальный характер и содержит всю необходимую уникальную информацию о специальном транспортном средстве и о грузе, перевозимом с помощью данного специального транспортного средства.
Формированный ФМн-сигнал u5(t) (фиг.7,в) излучается микрополосковой антенной 40.1 в эфир, улавливается приемопередающей антенной 49.1 сканирующего устройства 45.1 и через дуплексер 48.1 и усилитель 50.1 высокой частоты поступает на первый (информационный) вход фазового детектора 51.1, на второй (опорный) вход которого подается гармоническое колебание uc(t) (фиг.7, а) с выхода генератора 46.1 высокой частоты. В результате синхронного детектирования ФМн-сигнала u5(t) на выходе фазового детектора 51.1 образуется низкочастотное напряжение (фиг.7, г)
uн(t)=Uн·Cosφк(t), 0≤t≤Tc,
где 
пропорциональное модулирующему коду M3(1) (фиг.7, в). Это напряжение регистрируется и анализируется в компьютере 52.1.
Одновременно гармоническое колебание uc(t) (Фиг.7, а) с выхода генератора 46.1 высокой частоты поступает на первый вход смесителя 54.1, на второй вход которого подается напряжение гетеродина 53.1
uг1(t)=Uг1·Cos(wг1t+φг1).
На входе смесителя 54.1 образуются напряжения комбинационных частот. Усилителем 55.1 выделяется напряжение третьей промежуточной частоты (фиг.7, д)
uпр4(t)=Uпр4·Cos[wпр3t+φпр4), 0≤t≤Tc1,
где 
wпр3=wг1-wc - третья промежуточная частота;
φпр4=φc-φг1,
которое поступает на первый вход фазового манипулятора 56.1. На второй вход фазового манипулятора 56.1 подается модулирующий код M4(t) (фиг.7, е), который формируется в компьютере 52.1 и представляет собой сумму модулирующих кодов
M4(t)=M3(1)+M5(t)+M6(t),
где M3(t) - модулирующий код, содержащий всю необходимую информацию о специальном транспортном средстве и о грузе, перевозимом с помощью данного специального транспортного средства;
M5(t) - модулирующий код, содержащий сведения о номере контрольного поста и его географических координатах;
M6(t) - модулирующий код, содержащий сведения о времени прохождения специальным транспортным средством данного контрольного поста.
На выходе фазового манипулятора 56.1 формируется ФМн-сигнал (фиг.7,ж)
U6(t)=U6·Cos[wпр3t+φк3(t)+φпр3], 0≤t≤Tc,
где φк3(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M4(t) (фиг.7, с),
который после усиления по мощности в усилителе 57.1 поступает в приемопередающую антенну 49.1 и излучается ею в эфир на частоте w2=wпр3, улавливается приемопередающей антенной 8 пункта 7 управления и через дуплексер 18 поступает на вход универсального преобразователя 31 частоты. Указанный преобразователь обеспечивает, как это описано выше, подавление ложных сигналов (помех), принимаемых по первому зеркальному каналу на частоте wз1, по третьему wк3 и четвертому wк4 комбинационным каналам.
На выходе сумматора 26 в этом случае образуется суммарное напряжение
uΣ3(t)=UΣ3·Cos[wпр1t-φк3(t)+φпр1], 0≤t≤Tc,
где wпр1=wг1-wпр3 - первая промежуточная (разностная) частота, которое через открытый ключ 30 поступает на первый вход перемножителя 35, на второй вход которого подается напряжение uг2(t) гетеродина 32. На выходе перемножителя 35 образуется напряжение
u7(t)=U7·Cos[wг1t+φк3(t)+φг1], 0≤t≤Tc,
где 
wг1=wпр1+wг2,
которое выделяется полосовым фильтром 36 и поступает на первый (информационный) вход фазового детектора 37, на второй (опорный) вход которого подается напряжение гетеродина 19
uг1(t)=Uг1·Cos(wг1t+φг1).
На выходе фазового детектора 37 образуется низкочастотное напряжение
uн3(t)=Uн3·Cosφк3(t),
где Uн3=U7·Uг1,
пропорциональное модулирующему коду M4(t). Это напряжение поступает в первый процессор 10, который осуществляет разделение модулирующего кода M4(t) (кодограммы) на отдельные коды:
- модулирующий код M3(t), содержащий всю информацию о специальном транспортном средстве и о грузе, перевозимом с помощью данного специального транспортного средства;
- модулирующий код M5(t), содержащий сведения о времени прохождения специального транспортного средства данного контрольного поста.
Указанные сведения поступают на рабочее место 13 оператора. Дополнительно веденные в состав системы новые элементы и изменения структурной организации позволяют существенно улучшить качественные характеристики за счет введения следующих новых функциональных возможностей системы:
- расчет кратчайших безопасных маршрутов транспортировки особо важных и опасных грузов позволяет уменьшить длительность пути движения и расход энергоресурсов;
- контроль движения специального транспортного средства по разрешенному маршруту уменьшает степень опасности субъектам и объектам;
- выработка сигналов о несанкционированных разгрузках экологически опасных грузов в запрещенных местах складирования исключает создание экологически опасных несанкционированных свалок;
- выдача в центр контроля аварийных сигналов при транспортировке особо важных и опасных грузов обеспечивает быструю ликвидацию последствий аварии, сохранение материальных ценностей, безопасность, защиту и спасение людей.
Система обеспечивает также повышение избирательности, помехоустойчивости и достоверности обмена дискретной информации между пунктом управления и специальными транспортными средствами. Это достигается реализацией дуплексного метода радиосвязи с использованием двух частот w1, w2 и сложных сигналов с фазовой манипуляцией. Причем радиостанция, размещенная на пункте управления, излучает сложный ФМн-сигнал на частоте w1, а принимает - на частоте w2. А радиостанции, размещенные на специальных транспортных средствах, наоборот, излучают сложный ФМн-сигнал на частоте w2, а принимают - на частоте w1.
Обмен дискретной информацией между пунктом управления и специальными транспортными средствами носит конфиденциальный характер. При этом защита конфиденциальной информации имеет три уровня: криптографический, энергетический и структурный.
Криптографический уровень обеспечивается специальными методами шифрования, кодирования и преобразования дискретной информации, в результате которых ее содержание становится недоступным без предъявления ключа криптограммы и обратного преобразования.
Энергетический и структурный уровни обеспечиваются применением сложных ФМн-сигналов, которые обладают высокой энергетической и структурной скрытностью.
Предлагаемая система обеспечивает повышение достоверности контроля транспортировки особо важных и опасных грузов.
Это достигается дистанционной регистрацией на пункте управления факта и времени прохождения специальных транспортных средств, перевозящих особо важные и опасные грузы, через контрольные посты. При этом специальные транспортные средства снабжаются идентификационными ПАВ-метками, а контрольные посты - сканирующими устройствами, способными в автоматическом режиме передавать по радиоканалу на частоте w2 дискретную информацию, содержащую сведения о идентификационном номере специального транспортного средства и времени его прохождении через данный контрольный пост, причем указанная дискретная информация также носит конфиденциальный характер и имеет три уровня защиты: криптографический, энергетический и структурный.
Основной особенностью идентификационных ПАВ-меток являются малые габариты, большой срок службы и отсутствие источников питания.
Таким образом, предлагаемая система по сравнению с базовым объектом и другими техническими решениями аналогичного назначения обеспечивает повышение избирательности, помехоустойчивости и достоверности обмена дискретной информацией между пунктом управления и специальными транспортными средствами (мусоровозами, контейнеровозами, инкассаторскими машинами и т.д.), перевозящими особо важные и опасные грузы (экологически опасные грузы, промышленные и бытовые отходы при транспортировке их в места складирования и переработки, сильнодействующие ядовитые вещества, радиоактивные вещества, биологически опасные вещества, взрывчатые вещества, снаряды, мины, денежные средства при их транспортировке из банков к различным получателям, уникальные картины и другие материальные ценности). Это достигается путем полного подавления ложных сигналов (помех), принимаемых по зеркальным каналам на частотах wз1 и wз2, за счет использования комплексной (амплитудно-фазовой) системы идентификации приемных трактов. Указанная система использует гармонический калибровочный сигнал, получаемый от отдельного генератора (калибратора), частота wк которого отличается от первой промежуточной частоты wup1 на некоторую величину Δw. При малой величине Δw калибровочный сигнал несет информацию о неидентичности приемных трактов на первой промежуточной частоте wup1 в силу корреляции близких значений частотных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2403623C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2324957C1 |
| Система контроля транспортировки специальных грузов | 2019 |
|
RU2725769C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2308059C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2016 |
|
RU2628986C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2010 |
|
RU2425423C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2447513C1 |
| КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА | 2010 |
|
RU2446477C2 |
Предлагаемая система относится к технике контроля и тревожной сигнализации и может быть использована для оперативного контроля и управления транспортировкой особо важных и опасных грузов. Технический результат заключается в повышении избирательности, помехоустойчивости и достоверности обмена дискретной информацией между пунктом управления и специальными транспортными средствами путем полного подавления ложных сигналов (помех), принимаемых по зеркальным каналам на частотах wз1 и wз2. Территориальная система контроля транспортировки особо важных и опасных грузов содержит оборудование, размещенное на каждом специальном транспортном средстве, оборудование, размещенное на пункте 7 управления. Оборудование 1.i, размещенное на каждом специальном транспортном средстве, содержит датчик 2.1 координатной информации, датчик 2.2 характера груза, специальные датчики 2.3, абонентское устройство 3.i кодирования, устройство 4.i регистрации, радиостанцию 5.i с приемопередающей антенной 6.i и идентификационную метку 38.i (i=1, 2,…, n). Оборудование, размещенное на пункте 7 управления, содержит радиостанцию 9 с приемопередающей антенной 8, первый 10 и второй 14 процессоры, блок 11 сравнения, устройство 12 кодирования и рабочее место 13 оператора. Каждая радиостанция 9 (5.1) содержит генератор 15 (15.1) высокой частоты, фазовый манипулятор 16 (16.1), усилитель 17 (17.1) мощности, дуплексер 18 (18.1), первый 19 (19.1) и второй 32 (32.1) гетеродины, первый 20 (20.1) и второй 25 (25.1) фазовращатели на 90°, первый 21 (21.1) и второй 22 (22.1) смесители, первый 23 (23.1) и второй 24 (24.1) усилители первой промежуточной частоты, сумматор 26 (26.1), первый 27 (27.1) и второй 35 (35.1) перемножители, первый 28 (28.1), второй 61 (61.1) и третий 62 (62.1) узкополосные фильтры, первый 29 (29.1), второй 66 (66.1) и третий 67 (67.1) амплитудные детекторы, ключ 30 (30.1), универсальный преобразователь 31 (31.1) частоты, третий смеситель 33 (33.1), усилитель 34 (34.1) второй промежуточной частоты, полосовой фильтр 36 (36.1), фазовый детектор 37 (37.1), калибратор 58 (58.1), первый 59 (59.1) и второй 60 (60.1) регулируемые фазовращатели, первый 65 (65.1) и второй 70 (70.1) инверсные усилители, второй фазовый детектор 63 (63.1), первый 64 (64.1) и второй 69 (69.1) фильтры нижних частот, блок 68 (68.1) вычитания. Идентификационная метка 38.i содержит пьезокристалл 39.i, микрополосковую приемопередающую антенну 40.i, электроды 41.i, шины 42.i и 43.1, набор отражателей 44.i (i=1, 2,…, n). Сканирующее устройство 45.j содержит генератор 46.j высокой частоты, усилитель 47.j мощности, дуплексер 48.j, приемопередающую антенну 49.j, усилитель 50.j высокой частоты, фазовый детектор 51.j, компьютер 52.j, гетеродин 53.j, смеситель 54.j, усилитель 55.j третьей промежуточной частоты, фазовый манипулятор 56.j и усилитель 57.j мощности. 7 ил.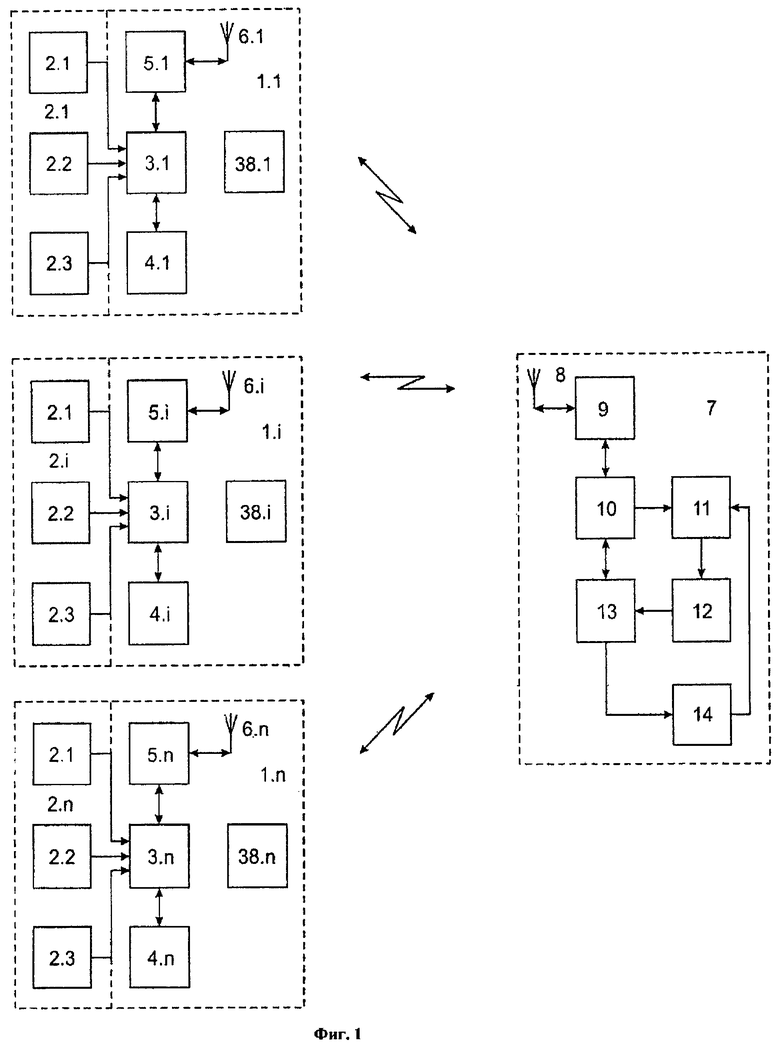
Территориальная система контроля транспортировки особо важных и опасных грузов, содержащая на каждом специальном транспортном средстве последовательно связанные радиостанцию, абонентское устройство кодирования и устройство регистрации, а также датчик координатной информации, датчик характера груза и сигнальные датчики, подключенные к абонентскому устройству кодирования, на пункте управления последовательно связанные радиостанцию, первый процессор и рабочее место оператора, к выходу первого процессора последовательно подключены блок сравнения, устройство кодирования, рабочее место оператора и второй процессор, выход которого соединен с вторым входом блока сравнения, при этом радиостанции специальных транспортных средств и пункта управления связаны между собой радиоканалами, каждая радиостанция содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, третий смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель второй промежуточной частоты, усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, и первый смеситель, второй вход которого соединен с первым выходом первого гетеродина, последовательно подключенные к второму выходу первого гетеродина первый фазовращатель на 90° и второй смеситель, второй вход которого соединен с выходом дуплексера, последовательно включенные первый усилитель первой промежуточной частоты, сумматор, второй вход которого через второй фазовращатель на 90° соединен с выходом второго усилителя первой промежуточной частоты, первый перемножитель, второй вход которого соединен с выходом дуплексера, первый узкополосный фильтр, первый амплитудный детектор, ключ, второй вход которого соединен с выходом сумматора, второй перемножитель, второй вход которого соединен с выходом второго гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с вторым выходом первого гетеродина, второй вход фазового манипулятора радиостанции, размещенной на пункте управления, соединен с первым процессором, а выход фазового детектора, подключен к первому процессору, второй вход фазового манипулятора радиостанции, размещенной на каждом специальном транспортном средстве, соединен с абонентским устройством кодирования, а выход фазового детектора подключен к абонентскому устройству кодирования, частоты wг1 и wг2 первого и второго гетеродинов разнесены на значения первой промежуточной частоты wпр1:
wг1-wг2=wпр1,
радиостанция, размещенная на пункте управления, выполнена с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте
w1=wг1=wпр2,
где wпр2 - вторая промежуточная частота, а приема - на частоте
w2=wг2=wпр3,
где wпр3 - третья промежуточная частота,
а радиостанция, размещенная на каждом специальном транспортном средстве, выполнена с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте w2, а приема - на частоте w1, при этом на специальных транспортных средствах размещены идентификационные метки, а на контрольных постах, через которые следуют специальные транспортные средства, перевозящие особо важные и опасные грузы, установлены сканирующие устройства, каждая идентификационная метка выполнена в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой приемопередающей антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой приемопередающей антенной, каждое сканирующее устройство выполнено в виде последовательно включенных генератора высокой частоты, усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, усилителя высокой частоты, фазового детектора, второй вход которого соединен с выходом генератора высокой частоты, и компьютера, последовательно включенных гетеродина, смесителя, второй вход которого соединен с выходом генератора высокой частоты, усилителя третьей промежуточной частоты, фазового манипулятора, второй вход которого соединен с компьютером, усилителя мощности и приемопередающей антенны, отличающаяся тем, что каждая радиостанция снабжена двумя регулируемыми фазовращателями, двумя инверсными усилителями, калибратором, вторым и третьим узкополосными фильтрами, вторым и третьим амплитудными детекторами, блоком вычитания, вторым фазовым детектором и двумя фильтрами нижних частот, причем к выходу первого смесителя последовательно подключены первый регулируемый фазовращатель, второй вход которого соединен с выходом калибратора, первый усилитель первой промежуточной частоты, второй узкополосный фильтр, второй фазовый детектор, первый фильтр нижних частот и первый инверсный усилитель, два выхода которого соединены с третьими входами первого и второго регулируемых фазовращателей соответственно, к выходу второго смесителя последовательно подключены второй регулируемый фазовращатель, второй вход которого соединен с выходом калибратора, второй усилитель первой промежуточной частоты и третий узкополосный фильтр, выход которого соединен с вторым входом второго фазового детектора, к выходу второго узкополосного фильтра последовательно подключены второй амплитудный детектор, блок вычитания, второй вход которого через третий амплитудный детектор соединен с выходом третьего узкополосного фильтра, второй фильтр нижних частот и второй инверсный усилитель, два выхода которых соединены с вторыми входами первого и второго усилителей первой промежуточной частоты соответственно, частота wк калибратора отличается от первой промежуточной частоты wпр1 на незначительную величину Δw.
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2403623C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2006 |
|
RU2312399C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 1999 |
|
RU2173889C2 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
| МНОГОЦЕЛЕВАЯ ОБУЧАЕМАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ГРУППОВОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ, ОСНАЩЕННАЯ МЕХАНИЗМАМИ ПОДДЕРЖКИ ДЕЯТЕЛЬНОСТИ ОПЕРАТОРОВ | 2007 |
|
RU2373561C2 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2004 |
|
RU2271038C1 |
| 2-ФЕНИЛТИОМЕТИЛ ЗАМЕЩЕННЫЕ 1,3-ДИКЕТОНЫ И ДИМЕТИЛМАЛОНАТ - СРЕДСТВА С ФУНГИЦИДНОЙ АКТИВНОСТЬЮ | 2015 |
|
RU2616603C2 |
| US 4742338 А, 03.05.1988. | |||

