Изобретение относится к технике контроля и тревожной сигнализации и может быть использовано для оперативного контроля и управления транспортировкой экологически опасных грузов и промышленных отходов в месте складирования и переработки.
Известные территориальные системы аналогичного назначения предназначены для:
- дистанционного контроля удаленных объектов (авт. свид. СССР N 966.714, G 08 В 1/08, 1981; N 1.363.126, G 08 В 26/00, 1987; N 1.730.648, G 08 В 13/08, 1990; N 1.764.070, G 08 В 26/00, 1990; патенты США N 3.636.560, G 08 В 1/08, 1972; N 3.713.125, G 08 В 13/08, 1973; патент ФРГ N 2.536.949, G 08 В 26/00, 1975 и др.);
- охранно-пожарной тревожной сигнализации (авт. свид. СССР N 864.318, G 08 В 25/12, 1979; патенты РФ N 2.058.592, G 08 В 1/08, 1996; N 2.032.220, G 08 В 13/00, 1992; патенты ФРГ N 2.616.603, G 08 В 1/08, 1979; N 2.700.690, G 08 В 1/00, 1980; патент Великобритании N 1.267.040, G 08 В 25/00, 1972; патенты США N 4.023.163, G 08 В 29/00, 1980; N 4.751.499, G 08 В 13/08, 1981 и др.);
- передачи по радиоканалу на приемный пункт сообщений о проникновении на охраняемый объект нарушителя (авт. свид. СССР N 924.735, G 08 В 25/00, 1979; N 1.650.018, G 08 В 13/00, 1986; N 1.751.795, G 08 В 13/22, 1990; N 1.755.310, G 08 В 17/10, 1990; патенты РФ N 2.053.561, G 08 В 13/00, 1996; патент США N 4.742.338, G 08 В 13/00, 1989; патент Франции N 2.199.151, G 08 В 25/00, 1974 и др.);
- контроля сейсмической обстановки на местности и сигнализации о несанкционированном проникновении объектов в режимную зону, например, аэропорта и предприятия, а также в санитарную зону водозаборников водоперекачивающей станции (авт. свид. СССР N 1.117.672, G 08 В 13/20, 1983; патент Франции N 2.415.840, G 08 В 13/00, 1989 и др.),
- контроля параметров движения транспортных средств (авт. свид. СССР N 1.693.622, G 08 В 23/00, 1988; патент РФ N 2.032.227, G 08 В 25/00, 1992 и др.);
- обнаружения и анализа взрывоопасной концентрации горючих газообразных веществ и их смесей (авт. свид. СССР N 783.816, G 01 В 1/08, 1980; N 849.257, G 08 В 1/08, 1981; N 1.196.629, G 08 В 17/10, 1984; N 1.693.620, В 08 В 17/00, 1986, N 1.702.406, G 08 В 17/10, 1988 и др.);
- контроля и сигнализации о работе территориально-распределенных объектов (авт. свид. СССР N 929.386, G 08 В 23/00, 1980; N 1.170.478, G 08 В 23/00, 1983; N 1,647.615, G 08 В 23/00, 1988, патенты США N 3.833.897, G 08 В 13/30, 1974; N 4.047.166, G 08 В 13/00, 1976; свид. РФ о полезной модели N 742, G 08 В 25/00 и др.).
Из известных систем наиболее близкой к предлагаемой является "Быстродействующая, мобильная, территориальная система охранной аварийной и вызывной сигнализации и управления" (свид. РФ о полезной модели N 742, G 08 В 25/00, 1992, опубл. в БИ N 8, 1995), которая и выбрана в качестве базового объекта. Указанная система обеспечивает защиту субъектов, а также жилых и промышленных объектов, расположенных на большой территории, а также высокую интеграцию услуг быстрого реагирования с доведением сигналов - взлома, пожара, аварии в энергокоммунальных системах, вызова скорой помощи, нарушение экологических показателей среды, степени сейсмической деформации до соответствующих служб реагирования.
Однако система, выбранная за базовый объект, не обеспечивает эффективного управления транспортными средствами при аварийных ситуациях и при транспортировке экологически опасных грузов ввиду отсутствия на центральном пункте управления информации о местоположении транспортных средств и информации о скорости движения, о фактах погрузки (разгрузки) экологически опасных грузов и сигналов об авариях. Это объясняется тем, что в составе транспортных средств отсутствуют датчики сигнализации об авариях, скорости движения, о перевозимом грузе, а на центральном пункте управления не осуществляется расчет разрешенных маршрутов передвижения транспортных средств и на него с транспортных средств не передаются данные о их местоположении в текущий момент времени.
Задачей изобретения является повышение экологической безопасности жилых и промышленных объектов путем обеспечения безопасного и контролируемого вывоза экологически опасных отходов жизнедеятельности человека и промышленных отходов в места складирования и переработки.
Задача решается тем, что территориальная система местоопределения и диспетчеризации транспортных средств, содержащая на транспортном средстве абонентское устройство кодирования, устройство регистрации и радиостанцию, на пункте управления последовательно связанные между собой радиостанцию, первый процессор и рабочее место эколога, при этом радиостанции транспортного средства и пункта управления связаны между собой радиоканалом, снабжена на транспортном средстве датчиком координатной информации, датчиком характера груза и сигнальными датчиками, на пульте управления блоком сравнения, кодирующим устройством и вторым процессором, причем на транспортном средстве датчики подключены к абонентскому устройству кодирования, которое связано с устройством регистрации и радиостанцией, на пункте управления к выходу первого процессора последовательно подключены блок сравнения, кодирующее устройство, рабочее место эколога и второй процессор, выход которого соединен со вторым выходом блока сравнения.
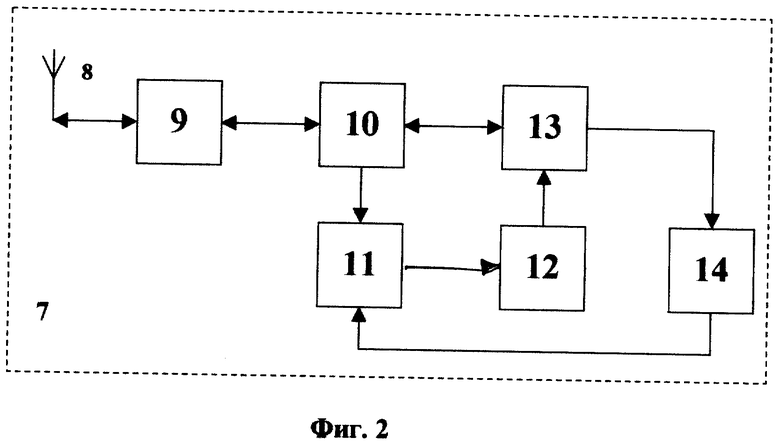
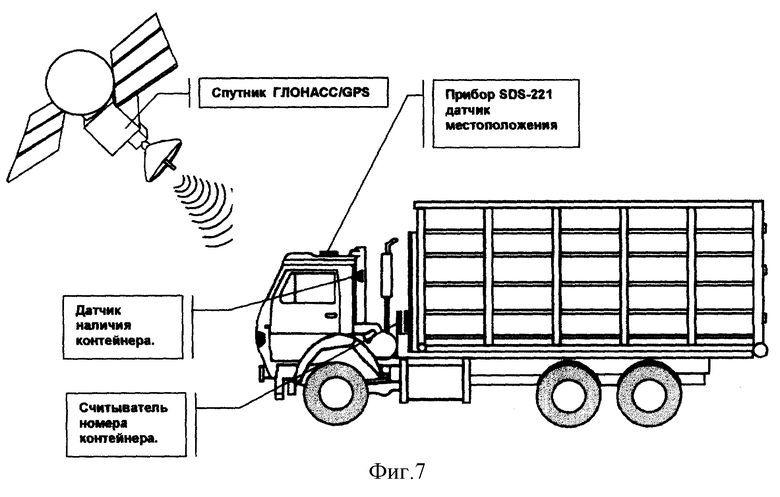
Структурная схема оборудования транспортного средства 1 представлена на фиг. 1. Структурная схема оборудования пункта управления 7 представлена на фиг. 2. Структурная схема радиостанции транспортного средства 1 (пульта управления 7) представлена на фиг. 3. Частотные диаграммы, поясняющие процесс образования дополнительных каналов приема, изображены на фиг. 4 и 5. Временные диаграммы, поясняющие принцип синхронного детектирования фазоманипулированного (ФМн) сигнала, показаны на фиг. 6. Взаимное расположение бортового оборудования специального транспортного средства схематически показано на фиг. 7. Процесс регистрации маршрутов движения на электронной карте территории Санкт-Петербурга изображен на фиг. 8.
Оборудование, размещаемое на транспортном средстве 1, включает в себя комплект 2 датчиков (2.1 - датчик координатной информации, 2.2 - датчик характера груза, 2.3 - сигнальные датчики), подключенных к абонентскому устройству кодирования 3, которое связано с устройством регистрации 4 и радиостанцией 5 с приемно-передающей антенной 6.
Оборудование, размещаемое на пункте управления 7, включает в себя последовательно связанные между собой приемно-передающую антенну 8, радиостанцию 9, первый процессор 10 и рабочее место эколога 13. К выходу первого процессора 10 последовательно подключены блок сравнения 11, кодирующее устройство 12, рабочее место эколога 13 и второй процессор 14, выход которого соединен со вторым входом блока сравнения 11.
Радиостанция 9 на пункте управления содержит последовательно включенные генератор 15 высокой частоты, фазовый манипулятор 16, второй вход которого соединен с выходом первого процессора 10, усилитель мощности 17, дуплексор 18, вход-выход которого соединен с приемно-передающей антенной 8, первый смеситель 21, второй вход которого соединен с первым выходом гетеродина 19, первый усилитель 23 промежуточной частоты и сумматор 26, последовательно подключены к выходу дуплексора 18 второй смеситель 22, второй вход которого через первый фазовращатель 20 на 90o соединен со вторым выходом гетеродина 19, второй усилитель 24 промежуточной часто ты, второй фазовращатель 25 на 90o, сумматор 26, перемножитель 27, второй вход которого соединен с выходом дуплексора 18, первый узкополосный фильтр 28, амплитудный детектор 29, ключ 30, второй вход которого соединен с выходом сумматора 26, удвоитель 32 фазы, второй узкополосный фильтр 33, делитель 34 фазы на два, третий узкополосный фильтр 35, частотный детектор 36, триггер 37, балансный переключатель 38, второй вход которого соединен с выходом третьего узкополосного фильтра 35, и фазовый детектор 39, второй вход которого соединен с выходом ключа 30, а выход является выходом демодулятора 40. При этом смесители 21 и 22, гетеродин 19, фазовращатели 20 и 25 на 90o, усилители 23 и 24 промежуточной частоты, сумматор 26, перемножитель 27, узкополосный фильтр 28, амплитудный детектор 29 и ключ 30 образуют универсальный преобразователь 31 частоты. Узкополосные фильтры 33 и 35, удвоитель 32 фазы, делитель 34 фазы на два, частотный детектор 36, триггер 37, балансный переключатель 38 и фазовый детектор 39 образуют универсальный демодулятор 40 фазоманипулированных сигналов.
Радиостанция 5 на транспортном средстве содержит аналогичные блоки, за исключением того, что ко второму входу фазового манипулятора 16 подключается выход абонентского устройства 3 кодирования, а вход-выход дуплексера 18 соединяется с приемно-передающей антенной 6.
Предлагаемая система работает следующим образом.
Чувствительными элементами системы являются датчик 2.1 координатной информации, датчик 2.2 характера груза и сигнальные датчики 2,3, устанавливаемые на каждом транспортном средстве.
Датчик 2.1 координатной информации (навигационный датчик) является неотъемлемым элементом глобальной радионавигационной спутниковой системы ГЛОНАСС (РФ) или GPS (США), состоящих из группировок спутников (18- 24) и управляемых из единых центров, выполняется съемным и выпускается промышленностью в стандартной упаковке (прибор SDS-221). С помощью указанной радионавигационной системы обеспечивается вычисление координат местоположения (с точностью до 1 метра) и вектора скорости транспортного средства. Датчик каждую секунду в момент смены секунды единого времени передает информацию в абонентское устройство 3 кодирования.
Датчик характера груза - это прибор для чтения информации о грузе. Информация считывается с маркера груза. Маркером груза могут быть - штриховой код, перфораторный код и т. д. Информация о характере груза также передается в абонентское устройство 3 кодирования.
Сигнальные датчики - это контакты и кнопки, которые фиксируют, например, поднятие-опускание контейнера при погрузке, распечатывание опломбированного груза, открывание - закрывание дверей кабины, капота, топливного бака и т.д. на транспортном средстве.
При выезде транспортного средства на линию водителю вместе с путевым листом под расписку выдается датчик 2.1 координатной информации, который вставляется в заранее оборудованное в транспортном средстве место (фиг. 7). После включения датчика происходит его автоматическая инициализация, и он связывается с данным транспортным средством. Эта связь осуществляется передачей особого параметра - бортового номера, однозначно определяющего данный автомобиль. После того как автомобиль отправился на линию, система автоматически осуществляет запись в файл базы данных его координаты на местности. Период обновления информации в файле базы данных равен установленному в датчике периоду передачи сигнала. Оператор-эколог может выбрать для просмотра то или иное транспортное средство, ориентируясь на гаражный номер или другие характеристики транспортного средства. После выбора транспортного средства на экране компьютера рабочего места эколога появится карта местности с привязанным к ней пройденным маршрутом транспортным средством в виде линии. Возможно изменение масштаба карты экологом для детализации маршрута транспортного средства. Если поместить курсор мыши на линию маршрута, то на экране появляются текущие на тот момент времени координатная информация, общий километраж, количество топлива в баке, скорость транспортного средства и т.д.
Устройство 3 кодирования получает данные состояния (показания) датчиков 2.1, 2.2 и 2.3, кодированные сообщения передаются на хранение в устройство 4 регистрации. С заданным периодом времени Т процессор 10 с пульта управления 7 через радиостанцию 9 дает сообщение-запрос в адрес очередного по порядку последовательного опроса транспортного средства на выдачу массива данных, накопленных в устройстве 4 регистрации. Указный массив с помощью фазоманипулированного (ФМн) сигнала
u1(t) = U1•cos[ω1•t+Φ1-(t)+Φ1), 0≅t≅T1,
где Φk1(t) = {0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем Φk1(t) = const при Kτэ<t<(K+1)τэ и может меняться скачком при t = Kτэ, т.е. на границах между элементарными посылками (К=1,2,. N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью T1(T1= Nτэ);
поступает в приемно-передающую антенну 6 и излучается в эфир, а затем принимается приемно-передающей антенной 8 и через дуплексор 18 поступает на вход универсального преобразователя 31 частоты.
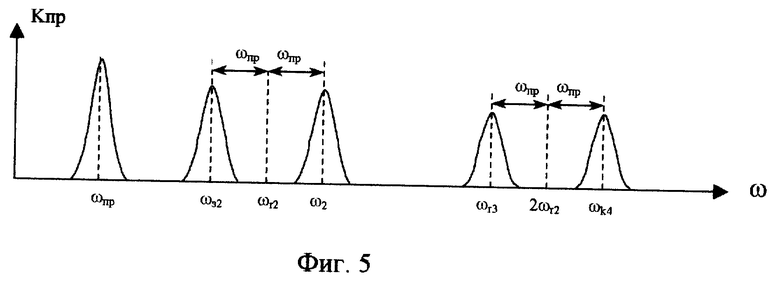
Преобразователь 31 частоты одно и тоже значение промежуточной частоты ωпр может быть получено в результате приема сигналов на двух частотах ω1 и ω3 (фиг. 4),т.е.
ωпр= ωr1-ω31 и ωпр= ω1-ωr1.
Следовательно, если частоту настройки ω1 принять за основной канал приема, то наряду с ним будет иметь место зеркальный канал приема, частота ωз1 которого отличается от частоты ω1 на 2ωпр и расположена симметрично (зеркально) относительно частоты ωr1 гетеродина. Преобразование по зеркальному каналу приема происходит с тем же коэффициентом преобразования Кпр, что и по основному каналу. Поэтому он наиболее существенно влияет на избирательность и помехозащищенность радиостанции 9.
Кроме зеркального существуют и другие дополнительные (комбинационные) каналы приема, из которых наиболее вредными являются каналы, возникающие при взаимодействии первой гармоники несущей частоты сигнала с гармоникой частоты гетеродина малого порядка (второй, третий и т.д.), так как чувствительность радиостанции 9 по этим каналам близка к чувствительности основного канала. Так, двум комбинационным каналам соответствуют частоты (фиг. 4):
ωк1= 2ωr1-ωпр и ωк2= 2ωr1+ωпр,
где 2ωr1 - вторая гармоника частоты гетеродина.
Наличие ложных сигналов (помех), принимаемых по зеркальному и комбинационному каналам, приводит к снижению помехоустойчивости радиостанции.
Для устранения этого недостатка в радиостанции 9 используется универсальный преобразователь 31 частоты, обеспечивающий подавление дополнительных каналов приема.
Принимаемый ФМн-сигнал u1(t) с выхода дуплексора 18 поступает на первые входы смесителей 21 и 22, на вторые входы которых подаются напряжения гетеродина 19 непосредственно и через фазовращатель 20 на 90o:
ur1(t) = Ur1•cos(ωr1t+Φr1);
На выходе смесителей 21 и 22 образуются напряжения комбинационных частот. Усилителями 23 и 24 выделяют напряжения промежуточной частоты:
uпр1(t) = Uпр1•cos[ωпрt+Φк1(t)+Φпр1];
где 
K1 - коэффициент передачи смесителей;
ωпр= ω1-ωr1 - промежуточная частота;
ωпр1= ω1-ωr1.
Напряжение uПР1(t) поступает на первый вход сумматора 26. Напряжение uПР2(t) с выхода усилителя 24 промежуточной частоты поступает на вход фазовращателя 25 на 90o, на выходе которого образуется напряжение
которое подается на второй вход сумматора 26. На выходе последнего образуется напряжение
где uΣ1= 2Uпр1;
которое поступает на второй вход перемножителя 27, на первый вход которого подается принимаемый ФМн-сигнал u1(t). Из полученного напряжения узкополосным фильтром 28, частота настройки ωcp1= 2ωr1, выделяется гармоническое колебание
u2(t) = U2•cos(ωr1t+Φr1), 0 ≅ t ≅ T1,
где 
K2 - коэффициент передачи перемножителя, которое после детектирования в амплитудном детекторе 29 поступает на управляющий вход ключа 30 и открывает его. В исходном состоянии ключ 30 всегда закрыт. При этом напряжение uΣ1(t) c выхода сумматора 26 через открытый ключ 30 поступает в демодулятор 40 для дальнейшей обработки.
Описанная выше работа универсального преобразователя 31 частоты соответствует случаю приема полезного ФМн-сигнала по основному каналу на частоте ω1.
Если ложный сигнал (помеха) принимается по зеркальному каналу на частоте ωз1 (фиг. 4)
u31(t) = Uз1•cos(ωз1t+Φз1), 0 ≅ t ≅ Tз1,
то усилителями 23 и 24 выделяются следующие напряжения
uпр4(t) = Uпр2•cos[ωпрt+Φпр2];
где 
ωпр= ωr1-ωз1 - промежуточная частота;
Φпр2 = Φr1-Φз1.
Напряжение uпр(t) поступает на вход фазовращателя 25 на 90o, на выходе которого образуется напряжение
Напряжения Uпр4(t) и Uпр6(t), поступающие на два входа сумматора 26, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по зеркальному каналу на частоте ωз1, подавляется. Для этого используются внешнее кольцо преобразователя 31 частоты, состоящее из гетеродина 19, фазовращателей 20 и 25 на 90o, смесителей 21 и 2, усилителей 23 и 24 промежуточной частоты и сумматора 26 и реализующее фазокомпенсационный метод.
По аналогичной причине подавляется фазокомпенсационным методом и ложный сигнал (помеха), принимаемый по первому комбинационному каналу на частоте ωК1.
Если ложный сигнал (помеха) принимается по второму комбинационному каналу на частоте ωК2, то усилителями 23 и 24 выделяются напряжения:
uпр7(t) = Uпр3•cos(ωпрt+Φпр3);
где 
ωпр= ωк2-2ωr1 - промежуточная частота;
Φпр3= Φк2-Φr1.
UK2,ΦK2(t),ΦK2(t),TK2 - амплитуда, частота и начальная фаза напряжения помехи, принимаемой по второму комбинационному каналу.
Напряжение Uпр7(t) поступает на первый вход сумматора 26. Напряжение
с выхода фазовращателя 25 на 90o, поступает на второй вход сумматора 26. На выходе последнего образуется напряжение
uΣ2(t) = UΣ2•cos[ωпрt+Φпр2], 0 ≅ t ≅ TK2,
где uΣ2= 2Uпр3;
которое поступает на второй вход перемножителя. На выходе последнего образуется гармоническое колебание
uЗ(t) = UЗ•cos(2ωr1t+Φr1), 0 ≅ t ≅ TK2,
которое не попадает на полосу пропускания узкополосного фильтра 28. Ключ 30 не открывается на ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте ωK2, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по другим комбинационным каналам. При этом используется внутреннее кольцо, состоящее из перемножителя 27, узкополосного фильтра 28, амплитудного детектора 29, ключа 30 и реализующее метод узкополосной фильтрации.
Необходимым условием синхронного детектирования принимаемого ФМн-сигнала является наличие в точке приема опорного напряжения, имеющего постоянную начальную фазу и частоту, равную частоте принимаемого сигнала.
В предлагаемом универсальном демодуляторе 40 опорное напряжение выделяется непосредственно из принимаемого ФМн-сигнала. Для этого напряжение uΣ1(t) (фиг. 6, б) с выхода сумматора 26 через открытый ключ 30 поступает на информационный вход фазового детектора 39 и на вход удвоителя фазы 32. Так как 2ΦK1(t) = {0,2π}, то в выходном напряжении удвоителя фазы 32 (фиг. 6, в)
uΦ(t) = uΣ1•cos[2ωпрt+2Φпр1], 0 ≅ t ≅ T1,
манипуляция фазы уже отсутствует.
Это напряжение выделяется узкополосным фильтром 33, частота настройки ωф2, которого выбирается равной ωф2= 2ωпр2, а затем делится по фазе на два в делители фазы (фиг. 6, г):
u5(t) = UΣ1•cos(ωпрt+Φпр1), 0 ≅ t ≅ T1
Полученное гармоническое колебание выделяется узкополосным фильтром 35, частота настройки ωф2 которого выбирается равной ωф3= ωпр, и может использоваться в качестве опорного напряжения.
Однако начальная фаза полученного колебания может иметь два устойчивых значения: Φпр1 и Φпр1+π. Это легко показать аналитически. Если произвести деление, аналогичное предыдущему, но предварительно добавив к аргументу угол 2π, что не изменяет исходного гармонического колебания, то после деления фазы на два получится колебание, сдвинутое по фазе на π:
Двузначность фазы полученного колебания вытекает из самого процесса деления фазы. Физически указанная двузначность начальной фазы объясняется неустойчивой работой делителя фазы (частоты).
Следовательно, указанному процессу выделения опорного напряжение из принимаемого ФМн-сигнала присуще явление "обратной работы", которое может быть двух типов. Первый тип "обратной работы" обусловлен неопределенностью начальной фазы опорного напряжения, выделяемого непосредственно из принимаемого ФМн-сигнала. При равновероятных значениях переменной составляющей фазы сигнала Φ1= 0 и Φ2= π отсутствует признак, который позволял бы "привязать" начальную фазу Φпр1 опорного напряжения одной из фаз сигнала. Поэтому начальная фаза опорного напряжения всегда имеет два устойчивых состояния Φпр1 (фиг. 6, з) и Φпр1+π (фиг. 6, к). Следовательно, можно выделить из принимаемого сигнал либо исходную модулирующую функцию M1(t) (фиг. 6, и), либо инверсную (обратную) модулирующую функцию (фиг. 6, г) в зависимости от того, как будут сфазированы входной сигнал и опорное напряжение (фиг. 6, з, к).
Однако, анализируя модулирующую функцию, выделяемую из принимаемого ФМн-сигнала в прямом (фиг. 6, и) или обратном коде (фиг. 6, л), можно достоверно определить ее параметры (закон фазовой манипуляции, длительность τЭ и количество N элементарных посылок). При этом не принципиально, в прямом или обратном коде анализируется модулирующая функция M1(t) (фиг. 6, а). Необходимо, чтобы было обеспечено постоянство начальной фазы опорного напряжения в течение всего времени приема и анализа сигнала. Поэтому в процессе синхронного детектирования ФМн-сигнала нет необходимости раскрывать неопределенность начальной фазы опорного напряжения, которая является внутренним свойством данных сигналов.
Таким образом, первый тип "обратной работы" не снижает достоверности синхронного детектирования принимаемого фМН-сигнала.
Второй тип "обратной работы" обусловлен скачкообразными переходами начальной фазы опорного напряжения из одного состояния Φпр1 в другое Φпр1+π под действием помех, кратковременного прекращения приема и других факторов. Эти переходы за время приема ФМн-сигнала происходят в случайные моменты времени, например, t1 и t2 (фиг. 6, г). При этом на входе фазового детектора 39 выделяется искаженная модулирующая функция M1(t) (фиг. 6, д). Данный тип "обратной работы" является весьма вредным в технике когерентного приема и синхронного детектирования ФМН-сигналов. Именно из-за этого типа "обратной работы" классическая фазовая манипуляция долгое время не находила широкого применения несмотря на ряд своих преимуществ.
В настоящее время существует несколько методов устранения "обратной работы" второго типа. Можно применять, например, специальные испытательные посылки для подтверждения правильности установки начальной фазы в приемнике [Петрович Н.Т., Размахнин М.К. Системы связи с шумоподобными сигналами. - М. : Сов. радио, 1969;] можно также использовать специальные коды, обнаруживающие и исправляющие ошибки, вызванные "обратной работой" второго типа [Хоменюк Ю. В. Об устранении "обратной работы" в когерентном приемнике сигналов, манипулированных по фазе. - Радиоэлектроника, N 6, 1966]. Однако указанные методы связаны с введением в сигнал некоторой избыточности, снижающей эффективность использования фазовой манипуляции.
В предлагаемом демодуляторе 40 реализован метод стабилизации начальной фазы опорного напряжения, выделяемого непосредственно из принимаемого ФМн-сигнала. Для этого часть напряжения с выхода узкополосного фильтра 35 подается на вход частотного детектора 36, который предназначен для обнаружения момента возникновения "обратной работы" второго типа. При скачкообразном изменении начальной фазы опорного напряжения на +180o в момент времени, например t1 (фиг. 6, г), на выходе частотного детектора 36 появляется положительный короткий импульс, а при скачке фазы на -180o в момент времени, например t2 (возвращение начальной фазы опорного напряжения в первоначальное состояние) - отрицательный короткий импульс (фиг. 6, е). Знакочередующие короткие импульсы с выхода частотного детектора 36 управляют работой триггера 37, выходное напряжение которого, в свою очередь, управляет работой двойного балансного переключателя 38.
В устойчивом состоянии, когда начальная фаза опорного напряжения совпадает, например, с нулевой фазой принимаемого ФМн-сигнала, на выходе триггера 37 образуется отрицательное напряжение и балансный переключатель 38 находится в своем первоначальном положении, при котором опорное напряжение u5(t) c выхода узкополосного фильтра 35 поступает на опорный вход фазового детектора 39 без изменения.
При скачкообразном изменении начальной фазы опорного напряжения на +180o, обусловленным, например, неустойчивой работой делителя 34 фазы под действием помех, триггер 37 положительным коротким импульсом с выхода частотного детектора 36 (фиг. 6, е) переводится в другое устойчивое состояние. При этом выходное напряжение триггера 37 в момент времени t1 становится и остается положительным до очередного скачка начальной фазы в момент времени t2, который возвращает начальную фазу опорного напряжения в первоначальное состояние (фиг. 6, ж).
Положительное выходное напряжение триггера 37 переводит балансный переключатель 38 в другое устойчивое состояние, при котором опорное напряжение с выхода узкополосного фильтра 35 поступает на опорный вход фазового детектора 39 с изменением начальной фазы на -180o. Это позволяет устранить нестабильность начальной фазы опорного напряжения, вызванную скачкообразным ее изменением под действием помех, и связанную с ней "обратную работу" второго типа. Следовательно, частотный детектор 36 обеспечивает обнаружение момента возникновения "обратной работы" второго типа, а триггер 37 и двойной балансный переключатель 38 устраняют ее. При этом на выходе фазового детектора 39 образуется низкочастотное напряжение
uн(t) = Uн•cosΦк(t),
где 
К3 - коэффициент передачи фазового детектора;
которое является аналогом модулирующей функции M1(t).
Указанное напряжение поступает в процессор 10, который осуществляет разделение модулирующей функции (кодограммы) на отдельные блоки данных по признакам:
- номер транспортного средства,
- данные географических координат транспортного средства;
- данные наличия груза на нем;
- данные скорости движения;
- наличие аварийных сигналов;
и передает их в блок 11 сравнения, куда поступает также заданные и рассчитанные с помощью процессора 14 данные. Результаты сравнения кодируются кодирующим устройством 12 в соответствующее сообщение, которое поступает на рабочее место эколога 13:
- транспортное средство находится на разрешенном (запрещенном) маршруте (участке) движения;
- складирование груза произведено на разрешенном (не разрешенном) участке (где именно) контролируемой территории;
- скорость движения транспортного средства соответствует (не соответствует) заданной на данном участке маршрута;
- показание датчика экологического аварийного сигнала в норме или поступил сигнал "Тревога".
Разрешенный маршрут движения выбирается процессором 14 на основе данных о начальном и конечном пунктах движения транспортного средства и выдается в форме маршрутного путевого листа водителю. Эти же данные через процессор 10 поступают в блок 11 сравнения.
С заданным периодом времени Т процессор 10 с пункта управления 7 через радиостанцию 9 по радиоканалу дает сообщение - запрос в адрес очередного по порядку последовательного опроса транспортного средства 1 на
выдачу массива данных, накопленных в устройстве регистрации 4, представляющем собой накопитель на гибком магнитном диске для записи.
С этой целью гармоническое колебание (фиг. 5)
uC2(t) = UC2•cos(ω2t+ΦC2), 0 ≅ t ≅ T2,
с выхода генератора 15 высокой частоты поступает на первый вход фазового манипулятора 16, на второй вход которого поступают из процессора 10 модулирующие коды, представляющие собой адреса опрашиваемых транспортных средств. На выходе фазового манипулятора 16 образуется фазоманипулируемый сигнал
который после усиления в усилители мощности 17 через дуплексор 18 излучается приемно-передающей антенной 8 в эфир, принимается приемно-передающей антенной 6 и через соответствующие блоки воздействует на устройство 4 регистрации для выдачи массива накопленных данных.
Структура радиостанции транспортного средства 5 аналогична структуре радиостанции 9 пункта управления 7. Указанные радиостанции связаны радиоканалом, который реализует дуплексный метод радиосвязи с использованием двух частот ω1 и ω2. Причем радиостанция 5 транспортного средства 1 на передачу работает на частоте ω1, а на прием - на частоте ω2. Радиостанция 9 пункта управления 7 наоборот. Передача осуществляется на частоте ω2, а прием - на частоте ω1. На указанных частотах формируются сложные ФМн-сигналы, которые позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одни и те же промежутки времени. Принципиально можно отказаться от традиционного метода разделения рабочих частот используемого диапазона между работающими радиостанциями транспортных средств и селекции на приемной стороне с помощью частотных фильтров. Его можно заменить новым методом, основанным на одновременной работе каждой радиостанции на указанных частотах сигналами со сложной структурой с выделением приемным устройством сигнала необходимой радиостанции посредством его структурной селекции. Интересной особенностью радиоканала, использующего ФМн-сигналы, являются его адаптивные свойства: с уменьшением числа работающих радиостанций транспортных средств помехоустойчивость автоматически возрастает.
С точки зрения обнаружения ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого ФМн-сигнал в точке приема может оказаться замаскированным шумами. Причем энергия ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов.
Структурная скрытность ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Оператор - эколог рабочего места 13 по мере поступления данных с транспортных средств осуществляет контроль выполнения нормативных документов и при необходимости по каналам голосовой связи дает команду на транспортные средства по корректировке действий транспортных средств, а при поступлении сигналов "Тревога" дает голосовую команду мобильным группам реагирования о прибытии в конкретное место для ликвидации чрезвычайной ситуации.
Таким образом, предлагаемая система по сравнению с базовой и другими системами аналогичного назначения обеспечивает повышение экологической безопасности жилых и промышленных объектов. Это достигается путем обеспечения безопасного и контролируемого вывоза экологически опасных отходов жизнедеятельности человека и промышленных отходов в места складирования и переработки, а также управления быстрым реагированием мобильными средствами на чрезвычайные ситуации для снижения возможного ущерба.
Дополнительно веденные в состав системы элементы и изменения структурной организации позволяет существенно улучшить качественные характеристики за счет введения следующих новых функциональных возможностей системы:
- расчет кратчайших безопасных маршрутов транспортировки экологически опасных грузов позволяет уменьшить длительность пути движения и расход энергоресурсов;
- контроль движения транспортного средства по разрешенному маршруту уменьшает степень опасности субъектам и объектам;
- выработка сигналов о несанкционированных разгрузках экологически опасных грузов в запрещенных местах складирования исключает создание экологически опасных несанкционированных свалок;
- выдача в центр контроля аварийных сигналов при транспортировке экологически опасного груза обеспечивает быструю ликвидацию последствий аварий.
Кроме того, предлагаемая система, используя универсальные преобразователи частоты и демодуляторы, позволяет повысить избирательность, помехоустойчивость и достоверность передачи дискретной информации по каналам дуплексной радиосвязи.
Эффективность предлагаемой системы подтверждена совместным проектом ОАО "Автопарк N 6 Спецтранс" и ЗАО "Сателлит-СПб", который успешно прошел испытания и активно внедряется в практику санитарной уборки города Санкт-Петербурга.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2004 |
|
RU2271038C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2011 |
|
RU2462759C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2403623C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| РЕГИОНАЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА СВЯЗИ | 2012 |
|
RU2504903C2 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2434244C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |




Изобретение относится к технике контроля и тревожной сигнализации и может быть использовано для оперативного контроля и управления транспортировкой экологически опасных грузов и промышленных отходов в места складирования и переработки. Техническим результатом является повышение экологически безопасного и контролируемого вывоза экологически опасных отходов жизнедеятельности человека и промышленных отходов в места складирования и переработки, система содержит на транспортном средстве датчик координатной информации, датчик характера груза, сигнальные датчики, абонентское устройство кодирования, устройство регистрации, радиостанцию с приемно-передающей антенной, на пункте управления - радиостанцию с приемно-передающий антенной, первый процессор, блок сравнения, кодирующее устройство, рабочее место эколога, второй процессор. 2 з. п. ф-лы, 8 ил.
| КОЛЕНЧАТЫЙ ВАЛ С ДИФФЕРЕНЦИАЛЬНОЙ ПЕРЕДАЧЕЙ | 1923 |
|
SU742A1 |
| Система для сигнализации о работе территориально-распределенных объектов | 1988 |
|
SU1647615A1 |
| ВЗБИВАЛЬНЫЙ ДИСК ДЛЯ КУХОННОГО ПРИБОРА | 2003 |
|
RU2336011C2 |
| ПНЕВМАТИЧЕСКАЯ ШИНА | 2015 |
|
RU2653921C1 |
| DE 1976483 А1, 16.07.1998. | |||
