Текст описания приведен в факсимильном виде.





















| название | год | авторы | номер документа |
|---|---|---|---|
| ИССЛЕДОВАТЕЛЬСКИЙ СТЕНД-ИМИТАТОР-ТРЕНАЖЕР "МОНОБЛОК" ПОДГОТОВКИ, КОНТРОЛЯ, ОЦЕНКИ И ПРОГНОЗИРОВАНИЯ КАЧЕСТВА ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ, ОСНАЩЕННЫЙ МЕХАНИЗМАМИ ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ ОПЕРАТОРОВ | 2007 |
|
RU2345421C1 |
| ИНТЕГРИРОВАННЫЙ МЕХАНИЗМ "ВИППЕР" ПОДГОТОВКИ И ОСУЩЕСТВЛЕНИЯ ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ, ОСНАЩАЕМЫЙ БЛОЧНО-МОДУЛЬНЫМ ОБОРУДОВАНИЕМ И МАШИНОЧИТАЕМЫМИ НОСИТЕЛЯМИ БАЗ ДАННЫХ И БИБЛИОТЕК СМЕННЫХ ПРОГРАММНЫХ МОДУЛЕЙ | 2005 |
|
RU2315258C2 |
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| Устройство формирования и обработки широкополосных сигналов | 2018 |
|
RU2691733C1 |
| Интегрированная автоматизированная система космодрома | 2017 |
|
RU2669330C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| Анализатор спектра | 1989 |
|
SU1651226A1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| Устройство для вывода графической информации | 1989 |
|
SU1698885A1 |
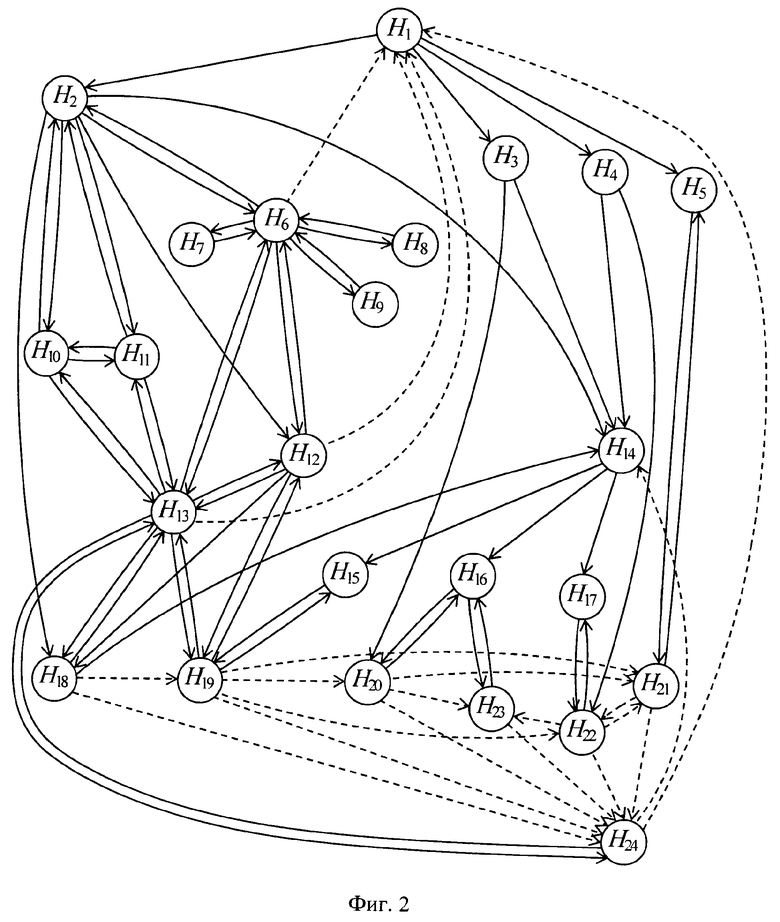

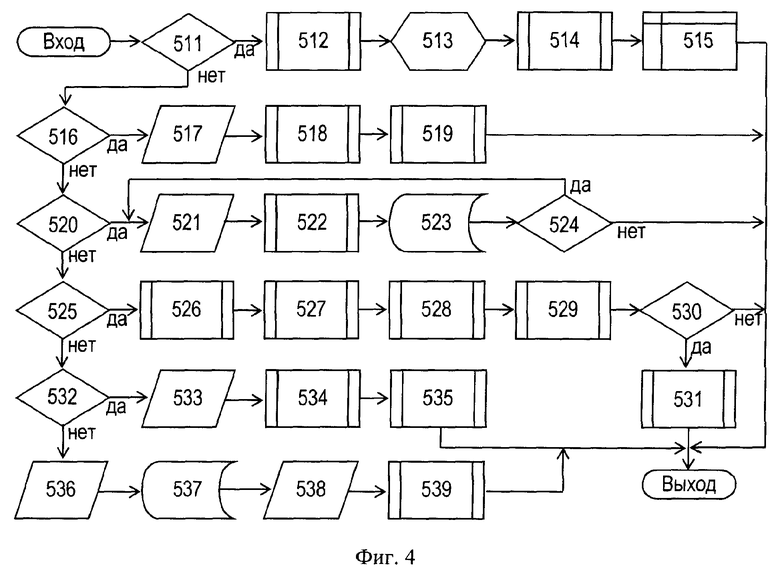
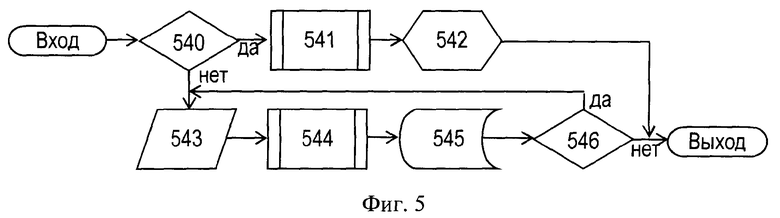
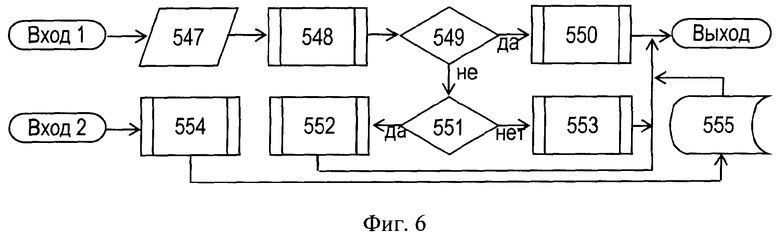
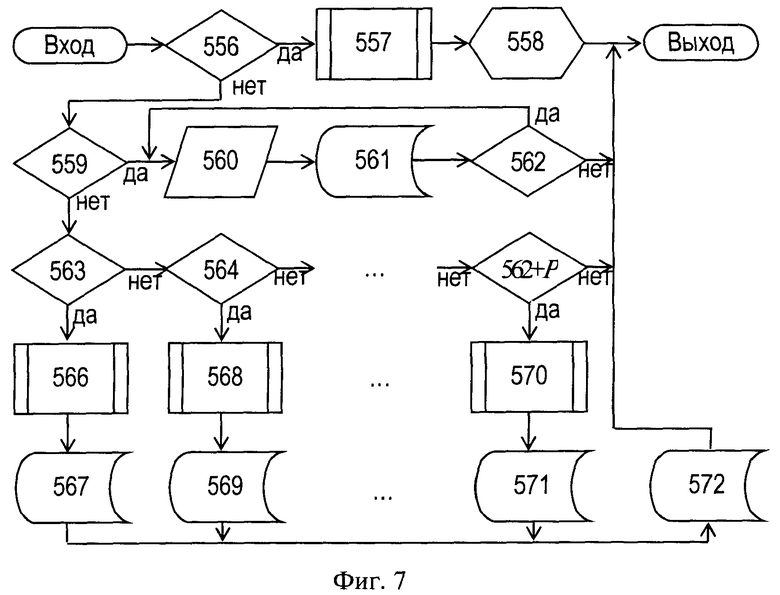

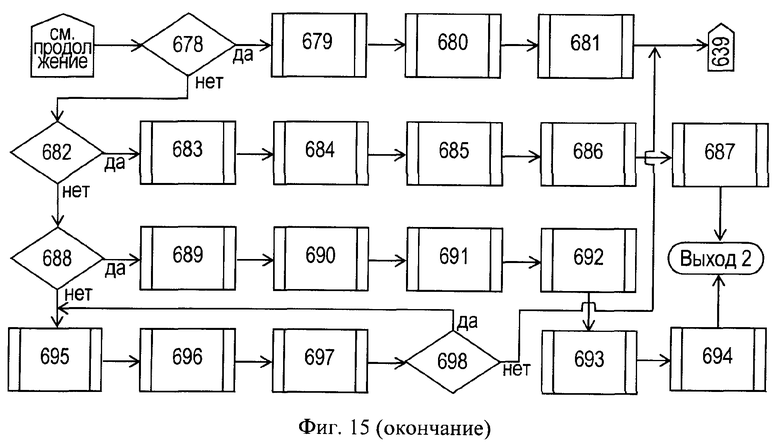
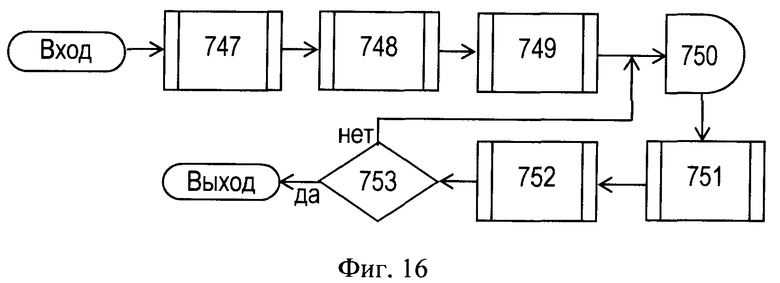
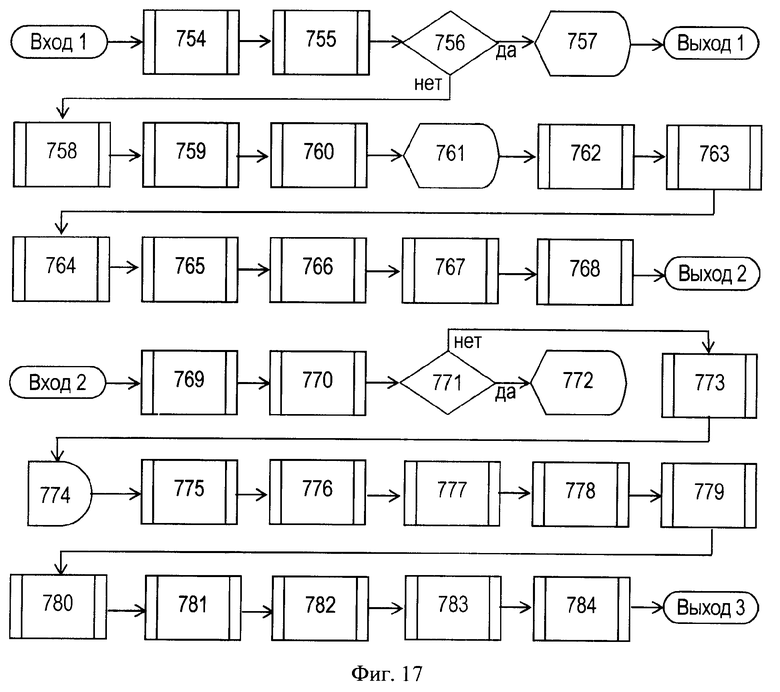
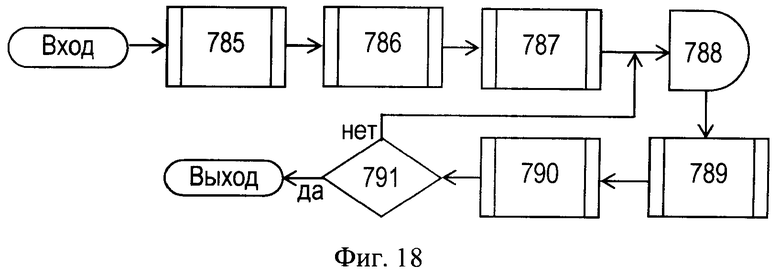
Изобретение относится к многоцелевым обучаемым автоматизированным системам группового дистанционного управления потенциально опасными динамическими объектами (ПОДО), преимущественно беспилотными летательными аппаратами специального назначения. Технический результат заключается в расширении функциональных возможностей известных технических решений в данной сфере. Он достигается тем, что многоцелевая обучаемая автоматизированная система группового дистанционного управления ПОДО содержит пять автоматизированных рабочих мест операторов, пять блоков поддержки операторов, пять блоков памяти, четыре блока обработки информации, три блока ввода-вывода данных, три блока отображения информации, три распределителя кодов, два блока ввода информации, два блока распределения функций, два вычислителя, два радиоприемника, два радиопередатчика, коммутатор, формирователь управляющих импульсов, блоки программного управления, имитации возмущающих воздействий, имитации объектов управления, виртуального инструктора, контроля, оценивания, прогнозирования, приоритета, обмена информацией, наведения, навигационного обеспечения, документирования информации, вывода информации и устройство информационно-технического сопряжения. 26 ил., 2 табл.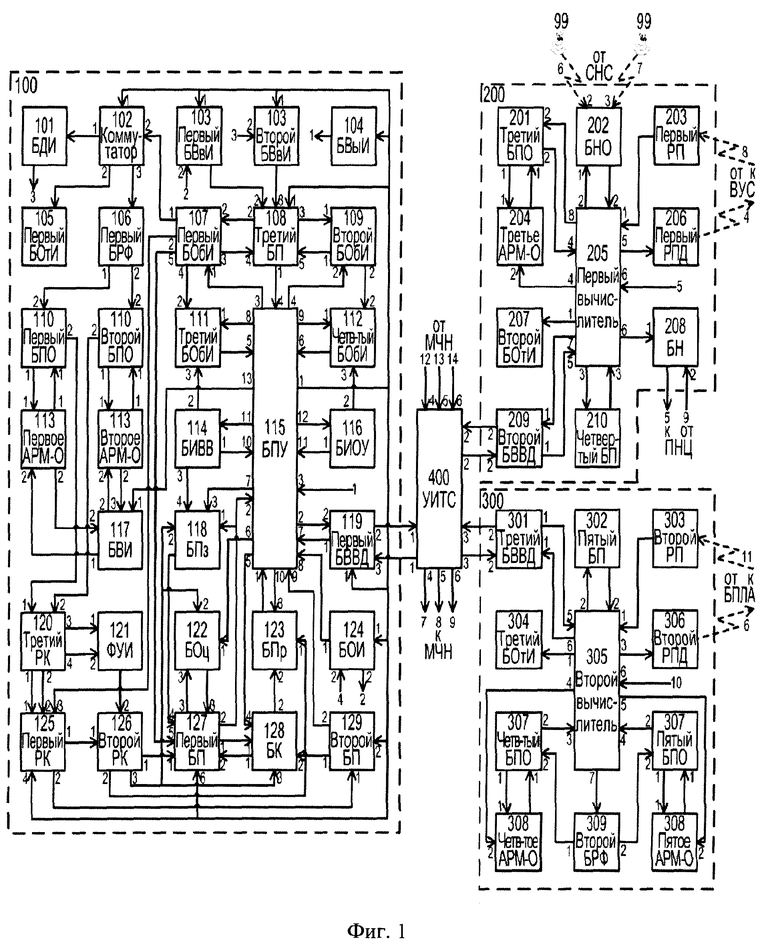
Многоцелевая обучаемая автоматизированная система группового дистанционного управления потенциально опасными динамическими объектами, оснащенная механизмами поддержки деятельности операторов, содержащая пять автоматизированных рабочих мест операторов (АРМ-O), пять блоков поддержки операторов (БПО), пять блоков памяти (БП), четыре блока обработки информации (БОбИ), три блока ввода-вывода данных (БВВД), три блока отображения информации (БОтИ), три распределителя кодов (РК), два вычислителя, два блока распределения функций (БРФ), два блока ввода информации (БВвИ), два радиоприемника (РП), два радиопередатчика (РПД), блок программного управления (БПУ), блок имитации возмущающих воздействий (БИВВ), блок имитации объектов управления (БИОУ), блок виртуального инструктора (БВИ), блок контроля (БК), блок оценивания (БОц), блок прогнозирования (БПз), формирователь управляющих импульсов (ФУИ), блок приоритета (БПр), блок обмена информацией (БОИ), блок навигационного обеспечения (БНО), блок наведения (БН), коммутатор, блок вывода информации (БВыИ), блок документирования информации (БДИ) и устройство информационно-технического сопряжения (УИТС), при этом последовательно соединены третий РК, первый РК, второй РК, первый БП и БК, ко второму входу которого подключен первый выход второго БП, первый вход которого соединен со вторым выходом первого РК, второй вход которого соединен со вторым выходом третьего РК, последовательно соединены БПр, БПУ, коммутатор и БДИ, последовательно соединены первый РП, первый вычислитель и второй БОтИ, последовательно соединены второй РП, второй вычислитель и третий БОтИ, последовательно соединены первый БПО и первое АРМ-О, первый выход которого подключен к первому входу первого БПО, последовательно соединены второй БПО и второе АРМ-О, первый выход которого подключен к первому входу второго БПО, вход первого БОтИ подключен ко второму выходу коммутатора, второй вход которого соединен с первым выходом первого БОбИ, второй выход которого подключен к третьему входу первого РК, а первый и второй входы первого БОбИ соединены соответственно с третьим выходом БПУ и со вторым выходом третьего БП, первый и третий выходы которого соединены соответственно с четвертым входом БПУ и первым входом второго БОбИ, первый и второй выходы которого соединены соответственно с пятым входом третьего БП и вторым входом четвертого БОбИ, а второй вход второго БОбИ подключен к четвертому выходу БПУ, третий, четвертый и пятый выходы первого БОбИ соединены соответственно с четвертым входом третьего БП, вторым входом третьего БОбИ и пятым входом первого БП, ко второму входу которого подключен первый выход БК, с третьим входом которого соединен третий выход второго РК, второй выход которого подключен к первому входу БПр, а второй вход - к выходу ФУИ, первый и второй входы которого соединены соответственно с третьим и четвертым выходами третьего РК, первый и второй входы которого соединены со вторыми выходами соответственно первого и второго БПО, первый выход БПУ соединен со входом БВыИ и с первыми входами первого БВвИ, второго БВвИ и третьего БП, второй и третий входы которого подключены к выходам соответственно первого и второго БВвИ, третий и четвертый входы первого БП соединены с выходами соответственно БОц и БПз, вторые входы которых подключены к третьему выходу второго РК, третий вход БОц соединен с третьим выходом первого БП, второй выход которого подключен к первому входу БПз и ко второму входу БПУ, шестой, седьмой и восьмой выходы которого соединены соответственно с первым входом БОц, третьим входом БПз и первым входом третьего БОбИ, выход которого подключен к пятому входу БПУ, пятый и девятый выходы которого соединены соответственно с четвертым входом БК и первым входом третьего БОбИ, первый и второй входы первого БВВД соединены соответственно с первым и вторым выходами БПУ, шестой, седьмой, восьмой и девятый входы которого соединены соответственно с выходом четвертого БОбИ, с выходом первого БВВД, с первым выходом БОИ и со вторым выходом второго БП, второй вход которого подключен к первому выходу БПУ, к которому подключен также первый вход БОИ, второй выход БК подключен ко второму входу БПр, третий вход которого соединен с десятым выходом БПУ, первый выход которого соединен с четвертым входом первого РК и шестым входом первого БП, второй вход первого вычислителя соединен с выходом БНО, первый вход которого соединен со вторым выходом первого вычислителя, третий и пятый выходы которого соединены со входами соответственно четвертого БП и первого РПД, а шестой и седьмой выходы первого вычислителя соединены с первыми входами соответственно БН и второго БВВД, первый выход которого соединен с пятым входом первого вычислителя, третий вход которого соединен с выходом четвертого БП, а к четвертому выходу первого вычислителя подключен второй вход третьего АРМ-О, второй вход второго вычислителя соединен с выходом пятого БП, вход которого соединен со вторым выходом второго вычислителя, пятый вход которого соединен с первым выходом третьего БВВД, первый вход которого соединен с шестым выходом второго вычислителя, третий выход которого соединен со входом второго РПД, а четвертый и пятый выходы второго вычислителя соединены со вторыми входами соответственно четвертого и пятого АРМ-О, вход первого БРФ подключен к третьему выходу коммутатора, первый выход первого БРФ соединен со вторым входом первого БПО, второй выход первого БРФ соединен со вторым входом второго БПО, вход БИВВ подключен к одиннадцатому выходу БПУ, первый выход БИВВ соединен с десятым входом БПУ, второй выход БИВВ соединен с третьим входом третьего БОбИ, третий выход БИВВ соединен с четвертым входом БПз, вход БИОУ подключен к двенадцатому выходу БПУ, первый выход БИОУ соединен с одиннадцатым входом БПУ, второй выход БИОУ соединен с третьим входом четвертого БОбИ, первый вход БВИ подключен к тринадцатому выходу БПУ, второй вход БВИ подключен ко второму выходу первого АРМ-О, третий вход БВИ подключен ко второму выходу второго АРМ-О, первый выход БВИ соединен со вторым входом первого АРМ-О, второй выход БВИ соединен со вторым входом второго АРМ-О, первый вход третьего БПО подключен к выходу третьего АРМ-О, второй вход третьего БПО подключен к восьмому выходу первого вычислителя, первый выход третьего БПО соединен с первым входом третьего АРМ-О, второй выход третьего БПО соединен с четвертым входом первого вычислителя, вход второго БРФ подключен к седьмому выходу второго вычислителя, первый вход четвертого БПО подключен к выходу четвертого АРМ-О, второй вход четвертого БПО подключен к первому выходу второго БРФ, первый выход четвертого БПО соединен с первым входом четвертого АРМ-О, второй выход четвертого БПО соединен с третьим входом второго вычислителя, первый вход пятого БПО подключен к выходу пятого АРМ-О, второй вход пятого БПО подключен ко второму выходу второго БРФ, первый выход пятого БПО соединен с первым входом пятого АРМ-О, второй выход четвертого БПО соединен с четвертым входом второго вычислителя, первый, второй и третий входы УИТС подключены ко вторым выходам соответственно первого, второго и третьего БВВД, первый, второй и третий выходы УИТС соединены соответственно с третьим входом первого БВВД, вторым входом второго БВВД и вторым входом третьего БВВД, причем первым, вторым, третьим и четвертым входами системы являются третий вход БПУ, второй вход первого БВвИ, второй вход второго БВвИ и второй вход БОИ соответственно, пятым, шестым, седьмым, восьмым и девятым входами системы являются шестой вход первого вычислителя, второй вход БНО, третий вход БНО, вход первого РП и второй вход БН соответственно, а десятым и одиннадцатым входами системы являются шестой вход второго вычислителя и вход второго РП соответственно, первым, вторым и третьим выходами системы являются выход БВыИ, выход БОИ и выход БДИ соответственно, четвертым, пятым и шестым выходами системы являются выход первого РПД, выход БН и выход второго РПД соответственно, четвертый, пятый и шестой входы УИТС являются соответственно двенадцатым, тринадцатым и четырнадцатым входами системы, а четвертый, пятый и шестой выходы УИТС являются соответственно седьмым, восьмым и девятым выходами системы.
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| ВИРТУАЛЬНЫЙ МУЛЬТИМЕДИЙНЫЙ ТРЕНАЖЕР КОЛЛЕКТИВА ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ | 2003 |
|
RU2239234C1 |
| ТРЕНАЖЕР КОЛЛЕКТИВА ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ | 1998 |
|
RU2176108C2 |
| US 7155158 B1, 26.12.2006. | |||

