Уровень техники
Настоящее изобретение относится к обнаружению и прогнозированию вихрей летательного аппарата, более конкретно к устройству прогнозирования и визуализации вихрей в спутном следе летательного аппарата.
Движение воздушного транспорта становится все более интенсивным, и ограниченная пропускная способность аэропортов все чаще приводит к задержкам рейсов. Ограниченная пропускная способность вызвана, отчасти, создаваемой летательным аппаратом турбулентностью в спутном следе, что накладывает ограничения на то, насколько должны быть разделены летательные аппараты при взлете и при посадке. Эти ограничения относятся как к действиям на одной взлетно-посадочной полосе, так и к действиям на параллельных взлетно-посадочных полосах. Например, в типичном случае промежуток между взлетами и посадками может составлять до трех минут, в зависимости от того, насколько следующий летательный аппарат меньше первого, чтобы турбулентность удалилась от взлетно-посадочной полосы и с трассы полета или рассеялась.
Турбулентность в спутном следе образуется в виде вихрей, тянущихся от законцовок крыла летательного аппарата. Пара вихрей, создаваемых каждым летательным аппаратом, - это результат подъемной силы, создаваемой крыльями и воздухом, вращающимся вокруг законцовок крыла от областей высокого давления у основания крыла к областям более низкого давления в верхней части крыла. Мощность вихрей зависит от формы и скорости летательного аппарата и от мгновенной подъемной силы, создаваемой крылом. Хотя существуют способы уменьшить мощность концевых вихрей, устранить их нельзя. Эти вихри могут сильно ударить другой летательный аппарат, который влетает в них, и вихри от транспортного летательного аппарата, летящего на скоростях приземления или взлета, могут перевернуть небольшой летательный аппарат и привести к потере управления.
На низких высотах вихри с законцовок крыльев нельзя наблюдать визуально за исключением случаев редких атмосферных условий. В исследовательских экспериментах турбулентность в спутном следе измерялась сложными и дорогостоящими лазерными доплеровскими устройствами, располагаемыми вдоль трассы полета. Лазеры могут быть нацелены поперек трассы полета и обнаруживать характерное приближающееся или удаляющееся движение воздуха в вихре. Однако такое оборудование работает не во всех погодных условиях и может быть слишком дорогостоящим для обычных взлетно-посадочных операций в аэропорте, и разнесение взлетов и посадок летательных аппаратов устанавливается в предположении наихудших погодных условий. Это может относиться не только к одиночным взлетно-посадочным полосам, но также к двойным траекториям захода на посадку к параллельным взлетно-посадочным полосам, расстояние между которыми существенно меньше одной мили. Это минимальное разнесение зачастую превышает достаточное разнесение, требуемое для обеспечения полной безопасности, если бы было точно известно местоположение и перемещение вихрей, это позволило бы избежать даже минимальных изменений на трассе полета.
Сущность изобретения
В соответствии с вариантом выполнения настоящего изобретения способ прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе может включать в себя сбор одного или нескольких наземных измерений, связанных с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе. Способ может также включать в себя сбор одного или нескольких бортовых измерений, связанных с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе. Кроме того, способ может включать в себя объединение множества наземных и (или) бортовых измерений для прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе при помощи модели прогнозирования вихрей в спутном следе, выбранной из множества моделей вихрей в спутном следе на основании группы входных данных и параметров, которые могут включать в себя наземные и бортовые измерения.
В соответствии с другим вариантом выполнения настоящего изобретения способ корректировки графиков системы управления воздушным движением может включать в себя накопление информации о вихрях в спутном следе, определение информации о разведении летательных аппаратов и определение информации о рабочем состоянии управления воздушным движением. Способ может также включать в себя объединение информации о вихрях в спутном следе, информации о разведении летательных аппаратов и информации о рабочем состоянии управления воздушным движением для корректировки графиков системы управления воздушным движением, отражающей любые изменения в связи с требованиями разнесения летательных аппаратов в зависимости от спутного следа.
В соответствии с еще одним вариантом выполнения настоящего изобретения система для прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе может включать в себя множество наземных датчиков для сбора данных, связанных с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе. Система может также включать в себя информационную систему управления вместе с телекоммуникационной сетью для приема бортовых измерений, связанных с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе, и приема данных от множества наземных датчиков. Кроме того, способ может включать в себя модель прогнозирования вихрей в спутном следе для прогнозирования по меньшей мере местоположения и интенсивности вихрей в спутном следе по меньшей мере на основании информации о состоянии от воздушного судна, создающего вихри в спутном следе.
В соответствии с еще одним вариантом выполнения настоящего изобретения система корректировки графиков системы управления воздушным движением может включать в себя средство обнаружения и прогнозирования вихрей в спутном следе для накопления информации об обнаружении и соединении вихрей в спутном следе. Система может также включать в себя средство разведения летательных аппаратов, которое вырабатывает информацию о разведении летательных аппаратов. Кроме того, система может включать в себя процесс принятия решения об операциях для соединения информации об обнаружении и прогнозировании вихрей в спутном следе, информации о неразведении летательных аппаратов и информации о рабочем состоянии управления воздушным движением для корректировки графиков системы управления воздушным движением в реальном времени с целью отражения любых изменений, связанных с требованиями о разнесении летательных аппаратов в зависимости от вихрей в спутном следе.
В соответствии с еще одним вариантом выполнения настоящего изобретения летательный аппарат может включать в себя множество датчиков для определения по меньшей мере скорости летательного аппарата и конфигурации летательного аппарата и устройство прогнозирования вихрей в спутном следе для прогнозирования по меньшей мере местоположения и интенсивности вихрей в спутном следе, создаваемых летательным аппаратом, на основании по меньшей мере скорости и конфигурации летательного аппарата. Летательный аппарат может также включать в себя передатчик для передачи информации о вихрях в спутном следе, соответствующей по меньшей мере прогнозированному местоположению и интенсивности вихрей в спутном следе, по меньшей мере на следующий летательный аппарат.
Способ идентификации вихревых потоков летательного аппарата включает в себя направление средства трассировки от первого летательного аппарата в вихревой поток, созданный первым летательным аппаратом, и обнаружение характеристики, соответствующей наличию средства трассировки, направленного в вихревой поток. Способ может дополнительно включать в себя, на основании по меньшей мере частично обнаруженной характеристики, направление полета первого летательного аппарата или второго летательного аппарата, следующего за первым летательным аппаратом, либо обоих летательных аппаратов. Например, способ может включать в себя управление расстоянием разнесения первого летательного аппарата и второго летательного аппарата и (или) направление второго летательного аппарата в сторону от вихревого потока.
Средство трассировки может включать в себя газ (например, газ, который легче воздуха), так чтобы средство трассировки стремилось переместиться в центр вихря. В других вариантах выполнения газ может содержаться внутри оболочек (например, в маленьких воздушных шариках). В других вариантах выполнения средство трассировки может включать в себя чешуйки или другие твердые предметы, разбрасываемые с летательного аппарата. В других вариантах выполнения средство трассировки может включать в себя энергию. Например, средство трассировки может включать в себя энергию, которая направлена в воздух, захваченный в вихревом потоке, для ионизации молекул воздуха в вихревом потоке. Ионизированные молекулы воздуха можно обнаружить и отличить от окружающих неионизированных молекул воздуха, например, при помощи радара. В других вариантах выполнения направление энергии в вихревой поток может включать в себя изменение других характеристик молекул воздуха. Например, направленная энергия может повысить электронное состояние молекулы воздуха, после чего можно обнаружить энергию, испускаемую молекулой, когда она возвращается в начальное энергетическое состояние. В любом из предыдущих вариантов выполнения средство трассировки может направляться меняющимся во времени образом для того, чтобы отличить средство трассировки от окружающей его среды.
Способ идентификации вихревых потоков летательного аппарата совместно с другим аспектом настоящего изобретения включает в себя создание вихревого потока в воздухе, прилегающем к летательному аппарату, посредством перемещения летательного аппарата относительно прилегающего воздуха и направления средства трассировки от летательного аппарата в вихревой поток. Средство трассировки визуально неотличимо от окружающей его среды для невооруженного глаза наблюдателя, находящегося на земле или в следующем летательном аппарате, когда средство трассировки находится в вихревом потоке.
Способ в соответствии с еще одним аспектом включает в себя обнаружение характеристики, коррелированной с наличием средства трассировки, направленного от летательного аппарата в вихревой поток воздуха, прилегающего к летательному аппарату, когда летательный аппарат перемещается относительно прилегающего воздуха. Средство трассировки визуально неотличимо от окружающей среды для невооруженного глаза наблюдателя, находящегося на земле или в следующем летательном аппарате, когда средство трассировки находится в вихревом потоке. Способ может дополнительно включать в себя выработку сигнала в ответ на обнаружение наличия средства трассировки.
В других частных аспектах способ может дополнительно включать в себя управление расстоянием разнесения первого летательного аппарата (с которого направлено средство трассировки) и второго летательного аппарата, или направление второго летательного аппарата в сторону от вихревого, или одновременно управление расстоянием разнесения и направление второго летательного аппарата в сторону от вихревого потока на основании, по меньшей мере частично, выработанного сигнала. Характеристика, коррелированная со средством трассировки, может быть обнаружена с земли или с другого летательного аппарата. В других вариантах выполнения к средству трассировки может быть добавлена энергия, и способ может дополнительно включать в себя обнаружение энергии, испускаемой средством трассировки.
Еще один аспект относится к летательному аппарату, который включает в себя полезный объем, несущую поверхность, расположенную таким образом, чтобы создавать подъемную силу и связанный с ней вихревой поток, и бортовую систему трассировки вихревого потока, которая включает в себя средство направления средства трассировки, расположенного для направления средства трассировки в вихревой поток, созданный несущей поверхностью, причем средство трассировки визуально неотличимо от окружающей среды для невооруженного глаза наблюдателя, находящегося на земле или в следующем летательном аппарате, когда средство трассировки находится в вихревом потоке. Система трассировки вихревого потока может дополнительно включать в себя контроллер, функционально связанный со средством направления средства трассировки, для избирательного включения средства направления средства трассировки.
Еще один аспект относится к системе идентификации вихревого потока, которая включает в себя наземный детектор, вектор обнаружения которого выровнен относительно оси захода на посадку/взлета для активной взлетно-посадочной полосы. С детектором функционально связан контроллер, и с детектором функционально связано устройство вывода для обеспечения идентификации, когда детектор обнаруживает в вихревом потоке характеристику, связанную со средством трассировки. В частных вариантах выполнения детектор может включать в себя по меньшей мере один детектор из детектора радиосигнала, детектора-радара, детектора-лидара или оптического детектора.
Другие аспекты и признаки настоящего изобретения, определяемые исключительно формулой, станут очевидными специалистам в данной области техники после ознакомления с нижеследующим неограничивающим подробным описанием изобретения совместно с прилагаемыми чертежами.
Краткое описание чертежей
Фиг.1 - блок-схема последовательности операций примерного способа прогнозирования и отображения местоположения, интенсивности и перемещения вихрей в спутном следе в соответствии с вариантом выполнения настоящего изобретения.
Фиг.2 - иллюстрация системы прогнозирования и отображения местоположения, интенсивности и перемещения вихрей в спутном следе в соответствии с вариантом выполнения настоящего изобретения.
Фиг.3А - блок-схема примерной системы для вихрей в спутном следе, на которой показаны различные вводимые данные или источники данных и выходная информация и информация, поступающая к пользователям, относительно изменения в работе системы управления воздушным движением в соответствии с другим аспектом настоящего изобретения.
Фиг.3В - блок-схема примерной системы для вихрей в спутном следе, на которой показаны различные вводимые данные и источники данных и выходные данные относительно полетных операций в соответствии с вариантом выполнения настоящего изобретения.
Фиг.4 - схематический вид системы направления средств трассировки в вихревые потоки летательного аппарата, обнаружения средств трассировки, обеспечения соответствующей обратной связи.
Фиг.5 - частично схематический вид летательного аппарата, имеющего средства направления средства трассировки, сконфигурированные в соответствии с несколькими вариантами выполнения изобретения.
Фиг.6 - увеличенный частично схематический вид области законцовки крыла, вмещающей средства направления средства трассировки, в соответствии с несколькими вариантами выполнения изобретения.
Фиг.7 - увеличенный вид части законцовки крыла летательного аппарата, вмещающей средство направления средства трассировки, которое направляет энергию в вихревой поток, в соответствии с вариантом выполнения изобретения.
Фиг.8 - блок-схема, на которой показан процесс направления средств трассировки от летательного аппарата в вихревой поток, созданный летательным аппаратом.
Фиг.9 - блок-схема, на которой показан процесс обнаружения характеристики, связанной с наличием средств трассировки, направленных от летательного аппарата в его вихревой поток.
Фиг.10 - частично схематический вид сверху летательного аппарата, приближающегося к наземному детектору средства трассировки, расположенному и сконфигурированному в соответствии с вариантом выполнения изобретения.
Подробное описание изобретения
Нижеследующее подробное описание вариантов выполнения дается со ссылкой на прилагаемые чертежи, которые иллюстрируют определенные варианты выполнения изобретения. Другие варианты выполнения, имеющие иные конструктивные элементы и этапы, не выходят за рамки объема настоящего изобретения.
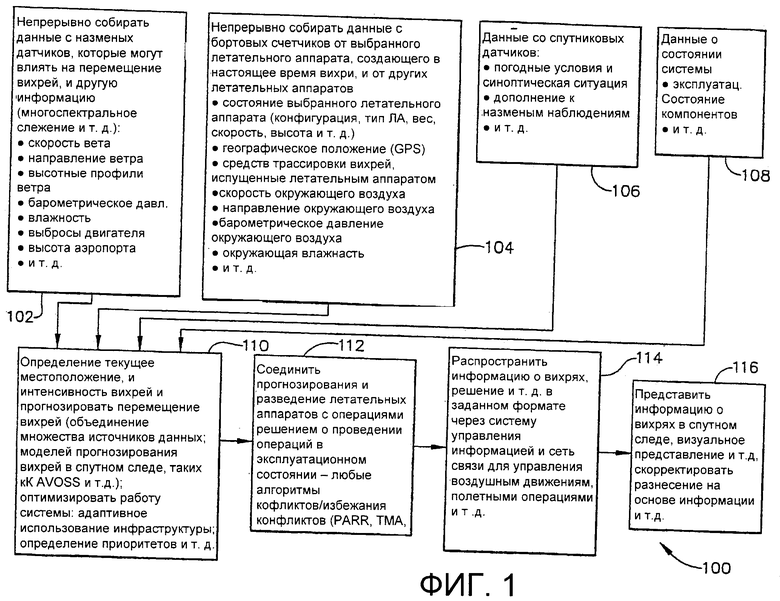
На фиг.1 приведена блок-схема последовательности операций примерного способа 100 прогнозирования и отображения местоположения, интенсивности и перемещения вихрей в спутном следе в соответствии с вариантом выполнения настоящего изобретения. В блоке 102 может осуществляться сбор или измерение данных с наземного датчика, которые могут повлиять на движение вихрей. Сбор и измерение данных могут осуществляться непрерывно или с заданной частотой для экономного использования полосы пропускания и оптимизации работы системы при некоторых рабочих условиях, как более подробно описано в настоящей заявке. Данные, сбор которых может осуществляться, могут включать в себя, в частности, скорость ветра, направление ветра, профили ветра, атмосферное давление, влажность, выбросы из двигателей, высоту аэропорта над уровнем моря и любые другие данные или информацию, относящуюся к атмосфере или окружающей среде, которую можно использовать для обнаружения и прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе.
В блоке 104 может осуществляться сбор данных с бортового датчика. Сбор данных может осуществляться с выбранного летательного аппарата, который создает вихри в спутном следе, и с другого летательного аппарата. Сбор бортовых данных может также осуществляться непрерывно или с заданной частотой для экономного использования полосы пропускания и оптимизации работы системы в зависимости от условий и эксплуатационных ограничений. Бортовые данные или информация, сбор или определение которых может осуществляться, могут включать, в частности, состояние выбранного летательного аппарата, который может создавать или вырабатывать вихри в спутном следе, географическое местоположение, скорость окружающего ветра, направление окружающего ветра, окружающее атмосферное давление, окружающую влажность и т.п.
Другие данные могут включать в себя средства трассировки вихрей, которые могут быть испущены системой трассировки вихрей, установленной на летательном аппарате для обнаружения вихря в режиме реального времени. Такая система осуществляет выброс из летательного аппарата материала или вещества, которое повышает способность определенных наземных или бортовых датчиков обнаруживать или определять местоположение вихрей в спутном следе, созданных летательным аппаратом. С целью оптимизации направления вихря для нацеливания системы обнаружения средства трассировки можно использовать устройство прогнозирования или информацию о состоянии. Предпочтительные варианты выполнения для трассировки вихрей летательного аппарата описаны ниже со ссылкой на фиг.4-10.
Примеры параметров, которые определяют состояние выбранного летательного аппарата, представляющего интерес, поскольку этот летательный аппарат создает вихри, которые могут воздействовать на другой летательный аппарат, могут включать в себя, в частности, конфигурацию летательного аппарата (положение закрылков в положении для взлета, посадки или крейсерского режима, шасси выпущены/убраны и т.д.), тип летательного аппарата, вес, скорость, высоту и т.п. Географическое положение летательного аппарата может определяться или измеряться Глобальной системой определения местоположения (GPS), инерционной навигацией или при помощи иной системы или методики.
В блоке 106 может осуществляться сбор данных с датчиков, расположенных на спутниках или в космосе. Данные спутниковых датчиков могут включать в себя, помимо прочей информации, погодные условия и синоптическую ситуацию. Данные со спутниковых датчиков могут дополнять наземные и иные наблюдения.
В блоке 108 данных может осуществляться сбор данных о состоянии системы и информации об эксплуатационном состоянии. Данные о состоянии системы могут включать в себя эксплуатационное состояние различных компонентов или элементов системы, используемые взлетно-посадочные полосы аэропорта, направления подлета и взлета и т.п. Данные о состоянии системы могут также включать в себя величину плотности воздушного движения, измеряемую напряженностью движения и задержками, параметры, относящиеся к ветру и погоде, которые могут повлиять на перемещение и рассеяние вихрей в спутном следе, а также другие параметры.
В блоке 110 могут быть определены местоположение и интенсивность вихревого тока и может быть прогнозировано перемещение вихря. Данные из множества источников могут объединяться при помощи технологии, такой как Общесистемное управление информацией (SWIM) или аналогичной, что может обеспечить считывание данных из всех источников и предоставление данных множеством различных пользователей или приложений. SWIM или аналогичная система может обеспечить мобильность, удобочитаемость и своевременность, что гарантирует качество обслуживания.
Модели прогнозирования вихрей в спутном следе, такие как система разнесения вихрей от летательных аппаратов НАСА (AVOSS) или аналогичные прогностические модели, можно использовать для прогнозирования вихрей в спутном следе, их местоположения, перемещения и интенсивности.
Из-за объема данных, которые при некоторых обстоятельствах могут быть получены и использоваться, могут быть реализованы варианты полосы пропускания для оптимизации работы системы. Один пример таких вариантов или методик может включать в себя адаптивное использование инфраструктуры, такое как отправка большего количества данных и с большей частотой только в случае необходимости, определяемой обстоятельствами. Другим примером может быть вариант использования/приоритетности инфраструктуры. В этом варианте в случае, когда в данных потребности нет, их не посылают или не используют, но когда они необходимы, приложения или данные с более низким приоритетом могут быть стерты или не использоваться.
В блоке 112 элементы или информация о прогнозировании вихрей в спутном следе, элементы или информация о разведении летательных аппаратов и информация о рабочем состоянии воздушного движения могут быть связаны, соединены или объединены для корректировки графиков системы управления воздушным движением в режиме реального времени для отражения любых изменений, связанных с требованиями разнесения воздушных судов в зависимости от вихрей в спутном следе. Система может использовать любые алгоритмы прогнозирования/обнаружения конфликтов, в том числе вышеупомянутую AVOSS, и инструменты планирования/недопущения столкновений, такие как радар, анализ, решение и упорядочение задач (PARR), маршрутный добрый советчик (EDA), советчик по управлению движением (ТМА), автоматизированная система центр-TRACON (CTAS), инструмент оценки запросов пользователя (URET) или подобные инструменты. Разведение транспортных средств - это процесс определения надлежащих команд, которые следует дать летательным аппаратам, чтобы обеспечить, что они ни при каких обстоятельствах не окажутся слишком близко друг к другу (в настоящее время предельное значение в районе аэропорта составляет 3 мили).
Элементы разведения летательных аппаратов могут включать в себя программное обеспечение автоматизации, которое прогнозирует будущие положения летательных аппаратов и затем оптимальным образом определяет изменения траекторий полета летательных аппаратов, необходимые для поддержания обязательного минимального расстояния. Разведение летательных аппаратов может также включать в себя авиадиспетчера, который на основании показаний радара прогнозирует заранее и затем указывает пилотам "векторы", чтобы они изменили курс.
Информация о рабочем состоянии воздушного движения может включать в себя взлетно-посадочные полосы, которые могут использоваться в аэропорте, направление подлета и определенную траекторию подлета, которая может выбираться исходя из погодных условий в данный момент времени, особенно направления ветра. Информация о рабочем состоянии воздушного движения может также включать в себя величину плотности движения, измеряемую по интенсивности движения и задержкам рейсов. В соответствии с вариантом выполнения настоящего изобретения другим требуемым параметром может быть погода, скорость и направление ветра и то, как это может подействовать на перемещение и рассеяние вихрей в спутном следе.
В блоке 114 информация о вихрях в спутном следе, решения или другие данные могут быть распространены в заданном формате через систему управления информацией и по сетям связи установленным подразделениям, таким как управление воздушным движением, выполнение полетов, отдельным летательным аппаратам, авиакомпаниям, военным и иным подразделениям, имеющим потребность в этой информации или данных. Информацию можно посылать в различных форматах различным другим подразделениям для упрощения их работы. Информация может распространяться по той же системе управления информацией и сети связи, которые используются для вышеописанного приема данных от различных источников.
В блоке 116 информацию о вихрях в спутном следе, представление вихрей в спутном следе, визуализацию или тому подобное можно представить соответствующим пользователям. Как указано выше, информация о вихрях в спутном следе или их визуализация могут использоваться для корректировки разнесения между летательными аппаратами и для повышения частоты посадок и взлетов. Визуализация может быть представлена в виде наложения на экран радара или другого устройства отображения.
На фиг.2 приведена система 200 прогнозирования и отображения местоположения, интенсивности и перемещения вихрей в спутном следе в соответствии с вариантом выполнения настоящего изобретения. В системе 200 можно реализовать способ 100. Система 200 может включать в себя множество наземных датчиков. Например, могут иметься многоспектральные датчики 202 слежения для обнаружения выбросов из двигателя летательного аппарата, изменения давления воздуха и т.п. с целью определения местоположения вихрей в спутном следе. Система может также включать датчики 204 локальной погоды для определения погодных условий, таких как скорость и направление ветра, температура воздуха, атмосферное давление, влажность и любые другие атмосферные условия или условия окружающей среды, которые могут потребоваться для обнаружения и прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе.
Система 200 может также включать в себя спутниковые датчики 205. Спутниковые датчики 205 могут включать в себя многоспектральные датчики, дополняющие наземные датчики 202 и 204. Спутниковые датчики могут определять погодные условия или синоптическую ситуацию или собирать другую информацию, которая может быть полезной для определения и прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе.
Система может также включать в себя бортовые датчики 206 для обеспечения данных от выбранного летательного аппарата 208, создающего вихри 210 в спутном следе. Бортовые датчики могут также включать в себя датчики 212 на другом летательном аппарате 214 для обеспечения информации или данных, которые можно использовать для определения и прогнозировании местоположения, интенсивности и перемещения вихрей в спутном следе. Как указано выше, данные от выбранного летательного аппарата 208, создающего вихри 210 в спутном следе, могут включать в себя данные, относящиеся к состоянию летательного аппарата, такие так конфигурация, тип летательного аппарата, вес, скорость, высота, географические местоположения и любая другая информация, которую можно использовать для определения или прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе от выбранного летательного аппарата 208. Выбранный летательный аппарат 208 может также иметь датчики 206 для определения атмосферных условий.
Датчики 212 на другом летательном аппарате 214 могут измерять или собирать аналогичные данные. Другой летательный аппарат 214 может содержать прогностическую модель 216 для вычисления или прогнозирования вихрей в спутном следе на основании данных, полученных от наземной станции 218, или может принимать вычисленные или определенные прогнозы вихрей от наземной системы 220 обработки. Наземная система 220 обработки может принимать наземные данные и бортовые данные через информационную систему 221 управления, действующую совместно с телекоммуникационной сетью 222 или другой сетью связи. Прогнозы, анализы и другие результаты в отношении вихрей в спутном следе также распространяются к летательным аппаратам, к пунктам 224 служб управления воздушным движением (ATS) и к другим пользователям, использующим ту же информационную систему 221 и телекоммуникационную сеть 222. Сеть 222 может включить в себя элементы для связи воздух-земля, связи воздух-воздух, связи со спутниками 205, связи по беспроводным и проводным линиям.
Представление 226 местоположения, интенсивности и перемещения вихрей в спутном следе относительно любых географических ориентиров и другого летательного аппарата может быть представлено авиадиспетчерам в пунктах ATS 224, может быть представлено пилотам на дисплее 228 приборной доски летательного аппарата и другим лицам. Представление может быть электронным наложенным изображением 229 на дисплее 230, отображающим воздушное движение, или на радарном дисплее.
Систему 220 обработки можно считать дополнительным элементом, действующим совместно с информационной системой и телекоммуникационной сетью 222. Система 220 обработки может включать в себя прогностическую модель 231 и интеграционную модель 232. Прогностическая модель 231, или модель прогнозирования вихрей в спутном следе, может прогнозировать по меньшей мере местоположение и интенсивность вихрей 210 в спутном следе по меньшей мере на основании информации о состоянии выбранного летательного аппарата 208, создающего вихри 210 в спутном следе. Интеграционная модель 232 может определять местоположение, интенсивность и перемещение вихрей в спутном следе на основании сочетания данных, собранных датчиками, и данных модели 231 прогнозирования вихрей в спутном следе.
Система 200 может также включать в себя систему 234 трассировки вихрей или аналогичную систему, которая выбрасывает из летательного аппарата материал или вещество 236, что повышает способность определенных наземных или бортовых датчиков обнаруживать и определять местоположения вихрей, созданных летательным аппаратом. Летательные аппараты могут также делиться друг с другом информацией посредством связи 238 воздух-воздух для прогнозирования и обнаружения вихрей в режиме реального времени.
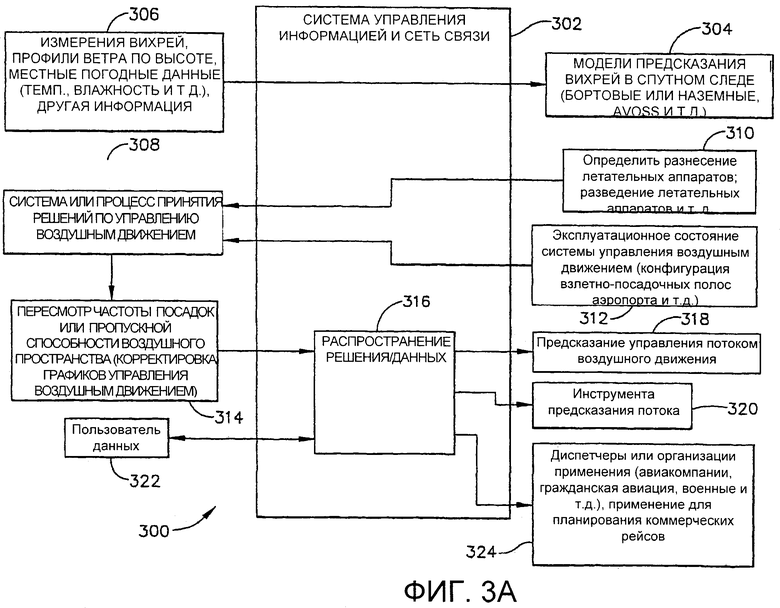
На фиг.3А приведена блок-схема примерной системы 300 для вихрей в спутном следе, иллюстрирующая различные входные данные и источники данных и выходную информацию, относящуюся к эксплуатационному изменению системы управления воздушным движением в соответствии с другим вариантом выполнения настоящего изобретения. Система 300 может быть системой управления информацией или подобной системой. Элементы системы 300 могут быть реализованы в системе 200, приведенной на фиг.2. Система 300 может включать в себя систему управления информацией и сеть 302 связи. Система управления информацией и система 302 связи могут использоваться в качестве системы управления 221 информацией и сети 222, а также системы 220 обработки системы 200. Сеть 302 может предоставлять данные для моделей 304 прогнозирования вихрей в спутном следе. Модели 304 могут находиться на наземной станции, как и прогностическая модель 231 на фиг.2, или могут находиться на борту летательного аппарата, как и модель 216 на фиг.2. Модели 304 прогнозирования вихрей могут быть моделями типа AVOSS НАСА или подобными моделями, подобно сказанному выше. Модель вихрей может принимать данные 306 наземных и бортовых датчиков, которые могут включать в себя данные о состоянии летательного аппарата, местоположение вихрей, определяемое измерениями с датчиков, профиль характеристик ветра по высоте, локальные погодные данные и другую информацию, которая может быть полезна для прогнозирования вихрей в спутном следе. Может быть выбрана определенная модель прогнозирования вихрей в спутном следе из множества моделей вихрей в спутном следе на основании входных данных и параметров.
Система 300 может также включать в себя систему или способ 308 принятия решения в отношении диспетчерских операций. Система или способ 308 принятия решения в отношении диспетчерских операций могут также принимать данные через сеть 302. Информация о прогнозировании вихрей в спутном следе от блока 304, информация 310 о разведении летательных аппаратов и информация 312 об эксплуатационном состоянии управления воздушным движением может соединяться или объединяться системой 308 принятия решения в отношении диспетчерских операций для корректировки графиков системы управления воздушным движением в режиме реального времени для отражения любых изменений, связанных с требованиями разнесения летательных аппаратов в зависимости от вихрей в спутном следе. Корректировка графиков системы управления воздушного движением может привести к пересмотру 314 частоты прилетов в аэропорт или емкости воздушного пространства.
В блоке 316 решения в отношении корректировки графиков планов системы управления воздушным движением и других данных могут распространяться через сеть 302. Решение/данные можно отправить в диспетчерскую службу для прогнозирования 318 управления потоком воздушного движения и к инструментам 320 прогнозирования потока воздушного движения для дополнительного анализа и изучения. Данные можно также направить согласованным пользователям 322 данных, а также операторам и приложениями 324, таким как авиакомпании, гражданская авиация, военное руководство, и другим для применения при составлении графика полетов и других применений. Доступ к системе 300 или сети 302 может обычно осуществляться только через безопасный интерфейс и в случае необходимости. Система 300 позволяет считывать данные со всех источников и делает данные доступными для всех приложений. Система 300 может также обеспечить мобильность, считываемость и своевременность для качественного обслуживания.
На фиг.3В приведена блок-схема примерной системы 300 для вихрей в спутном следе, иллюстрирующая различные входные данные и источники данных и выходные данные, относящиеся к результатам полетных операций, в соответствии с другим вариантом выполнения настоящего изобретения. Аналогично системе, описанной на фиг.3А, модель 304 прогнозирования вихрей в спутном следе может принимать входные данные от наземных и бортовых датчиков или из других источников, такие как данные о состоянии летательного аппарата, местоположение вихрей, определяемое измерениями датчика, профиль характеристик ветра по высоте, локальные погодные данные, или другую информацию, которая может быть полезной для прогнозирования местоположения и перемещения вихрей в спутном следе, что показано блоком 306. На основании выходных данных или параметров 306 может быть выбрана определенная модель вихрей в спутном следе из множества моделей вихрей в спутном следе. Выбранная модель 304 вихрей в спутном следе может обеспечить прогнозирования 326 перемещений вихрей и положение или местоположение 328 вихрей.
Прогнозирования 325 перемещения вихрей и положение 328 вихрей можно применить в системе или в способе 308 принятия решения в отношении диспетчерских операций, чтобы определить, дает ли прогнозирование положения и перемещения вихрей основания для выполнения действий в блоке 330, таких как корректировка разнесения летательных аппаратов описанным выше способом или другие действия. Любое решение и данные и информация о прогнозировании местоположения и перемещения вихрей могут распространяться через сеть 302 в блоке 316. Информация о положении летательного аппарата может быть объединена с информацией о вихрях в блоке 316. Информация о вихрях может затем распространяться для представления или отображения службе управления воздушным движением (АТС) 334, летательным аппаратам, на которые может воздействовать вихрь в спутном следе, при этом данные отображаются на дисплее 336 в кабине, или любым другим получателям, таким как Федеральное авиационное управление (FAA), или другим органам для ознакомления и анализа или для иных целей.
Несколько описываемых вариантов выполнения изобретения могут принять вид машиноисполняемых команд, включающих в себя программы, выполняемые программируемым компьютером. Специалистам в данной области техники должно быть понятно, что изобретение может быть реализовано на компьютерных системах, отличных от приведенных и описанных здесь. Изобретение может быть реализовано в компьютере специального назначения или в процессоре данных, который запрограммирован, сконфигурирован или сконструирован специальным образом для выполнения одной или нескольких из описанных ниже машиноисполняемых команд. Соответственно, в целом используемый в настоящей заявке термин "компьютер" относится к любому процессору и может включать в себя интернет-устройства и переносные устройства (включая наладонные компьютеры, носимые компьютеры, сотовые или мобильные телефоны, многопроцессорные системы, процессорную или программируемую бытовую электронику, компьютеры сети, мини-компьютеры и т.п.). Информация, обработанная этими компьютерами, может быть представлена на любом подходящем средстве отображения, включая электронно-лучевую трубку или жидкокристаллический монитор.
Изобретение может также быть реализовано в распределенных средах, когда задания или модули выполняются удаленными обрабатывающими устройствами обработки, связанными через сеть связи. В распределенной вычислительной среде программные модули или подпрограммы могут находиться в локальных и удаленных запоминающих устройствах. Описанные ниже аспекты изобретения могут храниться или распространяться на машиночитаемых носителях, в том числе на магнитных и оптических читаемых или сменных компьютерных дисках, а также распространяться в электронном виде по сетям. Структуры данных и передача данных, характерные для аспектов изобретения, также находятся в пределах объема изобретения.
Фиг.4 - схематическая иллюстрация системы 1100 направления средств трассировки в вихревые потоки летательного аппарата и определения характеристик, связанных с наличием средств трассировки вихревых потоков. Эта система 1100 в целом включает в себя средство 1120 направления средства трассировки, переносимое летательным аппаратом, и детектор 1130 средства трассировки, одни части которого могут переноситься одним или несколькими летательными аппаратами, а другие части могут находиться на земле. Аспекты системы в целом описаны ниже со ссылкой на фиг.4. Аспекты частных вариантов выполнения средств 1120 направления средства трассировки описаны после этого со ссылкой на фиг.5-7. Работа средств направления и детекторов средства трассировки описана со ссылкой на блок-схемы последовательности операций, приведенные соответственно на фиг.8 и 9, а на фиг.10 приведен детектор средства трассировки, сконфигурированный в соответствии с частным вариантом выполнения изобретения.
Посредством управления средством направления средства трассировки и детектором средства трассировки в соответствии с частными вариантами выполнения изобретения операторы могут более точно определять местоположение вихрей от летательного аппарата и могут направлять следующий летательный аппарат (и (или) другой летательный аппарат) в соответствии с этой информацией. В результате диспетчеры, ведущие летательные аппараты, могут устанавливать промежуток между летательными аппаратами в соответствии фактическими данными о вихрях, что, как ожидается, сократит расстояния между последующими летательными аппаратами по сравнению с традиционной методикой, в которой вихревые условия часто предполагаются более суровыми, чем они есть на самом деле.
Средство 1120 направления средства трассировки может переноситься одним или несколькими летательными аппаратами 1110, изображенными на фиг.4 как первый, или ведущий, летательный аппарат 1110а и второй, или идущий следом, летательный аппарат 1110b. Средство 1120 направления направляет средство трассировки в вихри 1111 в спутном следе летательных аппаратов, созданные летательными аппаратами 1110а, 1110b, при этом характеристики, связанные со средствами трассировки, могут быть определены детектором 1130 средства трассировки. Как вариант, можно повысить заметность характеристик для детектора 1130 средства трассировки посредством направления в вихри энергии от источника, находящегося на борту, или от наземного источника 1135. Информация, полученная детектором 1130 средства трассировки, соответствует местоположению вихрей 1111. Детектор 1130 средства трассировки может включать в себя один или несколько элементов детектора, например наземный детектор 1131 и (или) один или несколько бортовых детекторов. Бортовые детекторы могут включать в себя первый бортовой детектор 1132, установленный для обнаружения наличия вихря 1111, созданного летательным аппаратом, в котором он установлен. Соответственно, первый бортовой детектор 1132 на ведущем летательном аппарате 1110а может быть установлен для обнаружения вихря 1111, созданного ведущим летательным аппаратом 1110а. Эта информация может быть полезной в качестве диагностического инструмента (например, для проверки эксплуатационного состояния детектора 1120 средства трассировки) и (или) для предоставления информации о местоположении вихря 1111. Система 1100 может также включать в себя второй бортовой датчик 1133, установленный для обнаружения вихрей от другого летательного аппарата. Например, второй бортовой датчик 1133 на идущем следом летательном аппарате 1110b может быть установлен для обнаружения вихря 1111, созданного ведущим летательным аппаратом 1110а.
Информация, сгенерированная детектором 1130 средства трассировки, может поступить в сеть 1140 связи для соответствующего распространения к другим компонентам системы 1100 в целом. Соответственно, сеть 1140 связи может включать в себя наземные станции 1141, которые поддерживают линии 1142 воздух-земля с летательными аппаратами 1110а, 1110b. Наземные станции 1141 могут осуществлять связь со спутниками 1104, которые могут предоставлять дополнительную информацию. Дальнейшую информацию могут предоставлять погодные датчики 1103 и наземный детектор 1131. Система управления 1101 информацией управляет информацией, поступающей в сеть 1140 связи через процессор 1102 или другое подходящее устройство. В частных случаях процессор 1102 может также содержать инструменты прогнозирования наподобие тех, что были описаны выше. Прогнозирования, выполненные этими инструментами, можно сравнивать с фактическими данными, принятыми детектором 1130 средства трассировки.
Сеть 1140 связи может осуществлять маршрутизацию информации, принятой от детектора 1130 средства трассировки, до соответствующих мест. Одно такое место включает в себя помещение 1150 служб управления воздушным движением, где авиадиспетчеры наблюдают за средством отображения 1151 воздушного движения. Условное изображение 1152 вихрей, обнаруженных детектором 1130 средства трассировки, может быть наложено на средство отображения 1151 воздушного движения, чтобы помочь авиадиспетчеру 1153 направлять летательный аппарат в зоне своей ответственности. В частности, авиадиспетчер 1153 может использовать эту информацию для направления идущего следом летательного аппарата 1110b, на который потенциально воздействуют вихри 1111, созданные ведущим летательным аппаратом 1110a. Информация может быть также передана непосредственно на идущий следом летательный аппарат 1110b с наземных станций 1141 или с ведущего летательного аппарата 1110a по линии связи 1143 воздух-воздух. Соответственно, управляющий ведущим летательным аппаратом 1110a может иметь информацию о вихрях, созданных его летательным аппаратом, авиадиспетчер 1153 может принимать эту информацию и действовать в соответствии с ней, и управляющий идущим следом летательным аппаратом 1110b может также принимать эту информацию и действовать в соответствии с ней либо непосредственно, либо при содействии авиадиспетчера 1153.
На фиг.5 приведен частично схематический вид в изометрии типичного летательного аппарата 1110 (например, пассажирского и (или) транспортного воздушного судна), несущего на себе нескольких средств 1120 направления средства трассировки (показаны как средства 1120а-1120е направления средства трассировки), сконфигурированные в соответствии с несколькими вариантами выполнения изобретения. В целом предполагается, что данный летательный аппарат 1110 будет оснащен только одним таким средством направления средства трассировки, но в иллюстративных целях на фиг.5 один летательный аппарат 1110 содержит средства направления средства трассировки нескольких различных типов. В частных вариантах выполнения, более подробно описанных ниже, летательный аппарат 1110 может включать в себя множество средств направления средства трассировки.
Летательный аппарат 1110 может включать в себя фюзеляж 1114, крылья 1160 и двигатели 1116, которые обеспечивают основную силу тяги для летательного аппарата 1110. В вариантах выполнения, приведенных на фиг.5, двигатели 1116 прикреплены к крыльям 1160, но в других вариантах выполнения двигатели 1116 могут быть прикреплены к фюзеляжу 1114 или к другим деталям летательного аппарата 1110. В частном варианте выполнения, приведенном на фиг.5, первое средство 1120а направления средства трассировки размещено в одном или обоих крыльях 1160. В иллюстративных целях первое средство 1120а направления средства трассировки показано установленным только в одном из крыльев 1160. Первое средство 1120а направления средства трассировки может быть соединено с хранилищем 1121, которое содержит элементы средства трассировки, направляемые в вихри 1111 первым средством 1120а направления средства трассировки, и контроллер 1122, который управляет работой средств(а) 1120 направления средства трассировки. Элементы средства трассировки могут включать в себя самые различные элементы, которые могут быть обнаружены детектором 1130 средства трассировки (фиг.4). В частных вариантах выполнения элементы средства трассировки визуально различимы невооруженным глазом, а в других вариантах средства трассировки визуально неотличимы от окружающей среды невооруженным глазом. Например, элементы средства трассировки могут включать в себя возбужденный газ, такой как аммиак, который направляется из крыла 1160 в вихрь 1111. Более подробное описание и другие варианты выполнения средства трассировки приведены со ссылкой на фиг.8.
В других вариантах выполнения средство направления средства трассировки может быть расположено в частях летательного аппарата 1110, отличных от законцовок. Например, типичное второе средство 1120b направление средства трассировки может быть расположено вблизи закрылка или другого имеющегося на крыле летательного аппарата 1100 устройства 1164 для увеличения подъемной силы. Такое расположение может быть подходящим, когда предполагается, что самые мощные и (или) самые легко обнаруживаемые вихри, созданные летательным аппаратом, - это вихри, созданные устройствами 1164 для увеличения подъемной силы или вблизи них. В других вариантах выполнения детекторы средства трассировки могут располагаться в других местах летательного аппарата. Например, третье средство 1120с направления средства трассировки может быть расположено на двигателе 1116 для испускания средства трассировки в потоке реактивной струи. Такая схема может быть подходящей, когда предполагается, что реактивная струя двигателя будет захватываться вихрями летательного аппарата, например вихрями, созданными закрылками или другими устройствами 1164 на крыле летательного аппарата для увеличения подъемной силы.
Описанные выше первое, второе и третье средства 1120а-1120с направления средства трассировки могут быть соединены с хранилищем 1121, которое поставляет физический материал соответствующему средству направления средства трассировки для выбрасывания его в прилегающий к нему вихревой поток. Материал может включать в себя газ, жидкость, твердое тело, пар или взвесь жидкости. В других вариантах выполнения средство направления средства трассировки может направлять в вихревой поток не физические частицы, а энергию. В таких случаях средство направления средства трассировки может располагаться в любом месте из тех, что были описаны выше со ссылкой на средства 1120а-1120с направления средства трассировки. В альтернативном варианте средство направления средства трассировки может направлять энергию в вихревой поток из более удаленного места. Например, четвертое и пятое средства направления средства трассировки 1120d и 1120е могут находиться соответственно в хвосте и на фюзеляже летательного аппарата и нацелены в поперечном направлении к вихрям 1111. В еще одном варианте выполнения, описанном ниже со ссылкой на фиг.7, общее аналогичное средство направления средства трассировки может быть расположено ближе к законцовке крыла. Предполагается, что энергия, направленная в вихри 1111 средствами 1120d, 1120е направления средства трассировки, будет поглощаться молекулами в вихревом потоке. Поглощенная энергия может сделать молекулы более видимыми, например, посредством ионизации молекул или когда энергия переизлучается молекулами (посредством изменения молекулярного энергетического состояния или электронного энергетического состояния). В любом варианте выполнения результат, создаваемый энергией, заключается в том, что вихревой поток становится обнаружимым или более легко обнаружимым детектором 1130 средства трассировки (фиг.4).
В частном варианте выполнения один летательный аппарат 1110 может нести на себе одно или несколько средств 1120а-1120е направления средства трассировки. Например, летательный аппарат 1110 может включать в себя множество независимых или частично независимых средств направления средства трассировки для обеспечения резервирования. В других вариантах выполнения летательный аппарат 1110 может включать в себя множество средств направления средства трассировки, которые выполнены с возможностью совместной работы. Например, летательный аппарат 1110 может включать в себя одно средство направления средства трассировки (например, одно из средств 1120а-1120с направления средства трассировки) для направления физического вещества в вихревой поток и другое (например, одно из средств 1120а-1120с направления средства трассировки) для добавления энергии физическому веществу и (или) в целом вихревому потоку.
На фиг.6 приведен увеличенный, частично схематический вид крыла 1160, изображенного на фиг.5, а также первое и второе средства 1120а, 1120b направления средства трассировки. Первое средство 1120а направления средства трассировки может получать элементы средства трассировки из хранилища 1121 и направлять их через любые из множества отверстий 1163 подачи. Например, элементы средства трассировки могут направляться через одно или несколько отверстий 1163а подачи, расположенных в законцовке 1161 крыла, одно или несколько отверстий 1163b подачи, расположенных в задней кромке крыла 1160, и (или) одно или несколько отверстий 1163с подачи, расположенных на крылышке 1162 крыла 1160. Второе средство 1120b направления средства трассировки может направлять элементы средства трассировки через одно или несколько отверстий 1163d подачи, расположенных на внутренних и (или) наружных концах закрылков крыльев или другого устройства 1164 для увеличения подъемной силы. В другом варианте выполнения отверстия 1163е подачи могут быть расположены в крыле 1160 вдоль проема, в который убирается устройство 1164 для увеличения подъемной силы. Число отверстий 1163a-1163d подачи, приведенное на фиг.6, является типичным для частных вариантов выполнения. В других вариантах выполнения число отверстий 1163a-1163d подачи может быть меньше (например, одно отверстие 1163a-1163d подачи для каждого соответствующего места) или больше числа, изображенного на фиг.6.
На фиг.7 приведен частично схематический вид крыла 1160 с шестым средством 1120f направления средства трассировки, помещенным в законцовку 1161 крыла, для направления энергии в прилегающий вихревой поток. В одном варианте выполнения шестое средство 1120f направления средства трассировки может включать в себя ионизатор, который ионизирует молекулы воздуха вблизи законцовки 1161 крыла. Ионизатор может включать в себя одну или несколько электрически заряженных острых или заостренных поверхностей, которые эффективно ионизируют молекулы прилегающего воздуха. Предполагается, что ионизированные молекулы воздуха обладают более высокой отражающей способностью для радара (или других электромагнитных волн) по сравнению с окружающими неионизированными молекулами. Соответственно, ионизированные молекулы могут обеспечить указание на местоположение вихря.
На фиг.8 приведена блок-схема последовательности операций, иллюстрирующая процесс 500 направления средства трассировки в вихревой поток при помощи одного или нескольких из вышеописанных средств направления средства трассировки. Часть 501 процесса включает в себя создание вихревого потока в воздухе, прилегающем к летательному аппарату. Часть 502 процесса включает в себя направление средства трассировки от летательного аппарата в вихревой поток. Средство трассировки может направляться в вихревой поток с постоянным расходом, как показано в блоке 503, или с расходом, изменяющимся во времени, показано в блоке 504. Одно предполагаемое преимущество, связанное с направлением средства трассировки с расходом, изменяющимся во времени, состоит в том, что в этом случае средство трассировки может лучше отличаться от окружающей среды. Например, если окружающая среда обеспечивает устойчивый уровень фонового шума, принимаемый детектором средства трассировки, то средство трассировки, появление которого зависит от времени, скорее всего, будет более отчетливо выделяться над фоном. Если окружающая среда обеспечивает переменный во времени уровень фонового шума, принимаемый детектором средства трассировки, то испускание средства трассировки может меняться во времени иначе, чем меняется фоновый шум. Затем можно использовать соответствующие методы фильтрации для выделения требуемого сигнала (связанного со средством трассировки) на фоновом шуме (связанном с окружающей средой).
В части 505 процесса в вихревой поток направляют физическое вещество. Физическое вещество может включать в себя газ (блок 506), газонаполненный воздушный шар или газ в иной оболочке (блок 507), мелкие чешуйки (блок 508) или другое (блок 509). Когда в вихревой поток направлен газ, его можно выбрать в соответствии с несколькими критериями, в число которых входит совместимость с окружающей средой и способность держаться в воздухе. Например, можно выбрать аммиак, потому что он легче воздуха и поэтому предполагается, что благодаря центробежной силе, создаваемой в вихре, его будет притягивать к сердцевине, или к центру, вихря. В результате, как предполагается, аммиак (или другой газ легче воздуха) будет находиться в вихре относительно долгое время и потому сможет относительно длительное время указывать на присутствие вихря. Кроме того, предполагается также, что аммиак относительно слабо воздействует на окружающую среду того района, где он распылен.
Аммиак можно возбудить (например, при помощи аммиачного мазера или другого устройства микроволнового диапазона) на резонансной частоте 23,9 ГГц, эффективно вызвав микроволновую флюоресценцию. В других вариантах выполнения для возбуждения аммиака можно использовать другие устройства. В других вариантах выполнения аммиак можно возбудить на других частотах в окрестности резонансной частоты (например, с учетом расширения линии). Аммиак (NH3) имеет сильный дипольный момент и может легко подвергаться "азотной инверсии" при комнатной температуре, когда атом азота проходит через плоскость, образованную тремя атомами водорода, с энергией 24,7 кДж/моль, что соответствует резонансной частоте 23,9 ГГц. Эта резонансная частота в свою очередь соответствует длине волны микроволнового излучения 1,26 сантиметра, которая находится близко к частоте 24 ГГц оригинального радара, работающего в в K-диапазоне. Это частота близка к полосе поглощения для воды, и потому предполагается, что молекулы аммиака будут достаточно хорошо выделяться и отличаться от молекул воды. Аммиак также имеет полосы поглощения/испускания в инфракрасном диапазоне на длинах волн 2,9, 3,0, 6,146 и 10,53 микрометров. Соответственно, для обнаружения аммиака можно альтернативно использовать инфракрасный диапазон, а не диапазон радара.
В других вариантах выполнения средство трассировки может включать в себя газ, отличный от аммиака. Например, другие газы, которые были изучены, но которые, как предполагается, не столь желательны, как аммиак, включают в себя водород, гелий, метан, водяной пар, фторводород, неон, ацетилен, диборан, окись углерода, азот и этилен. В других вариантах выполнения можно использовать другие газы или газовые смеси. Например, отдельные газы, которые обычно нельзя обнаружить порознь, но можно обнаружить в смеси, можно смешать и выпустить из летательного аппарата в качестве средства трассировки.
Если в качестве элемента средства трассировки используется газонаполненный воздушный шарик (блок 507), можно выбрать газ легче воздуха, как описано выше, а воздушный шарик можно выбрать из биоразлагающегося материала. В частном варианте выполнения выбор газа может определяться не только тем, что он легче воздуха, но и тем, чтобы он вступал в реакцию с воздушным шариком, ускоряя его биоразложение. Соответственно, воздушные микрошарики могут быть наполнены таким газом непосредственно перед разбрасыванием с летательного аппарата. После разбрасывания газ легче воздуха внутри воздушного шарика стремится удержать воздушный шарик в сердцевине вихря. Характеристики газа и воздушного шарика можно выбрать при помощи известных специалисту в данной области техники методик таким образом, чтобы шарик разлагался после выбранного промежутка времени (например, примерно через минуту), что дает достаточно времени для обнаружения воздушного шарика, а затем воздушный шарик может разложиться полностью или, по меньшей мере, частично до того, как достигнет земли. Например, газ может включать в себя кислотный или другой разъедающий компонент.
Если в качестве элемента средства трассировки выбраны отражающие чешуйки (блок 508), их можно выбрать таким образом, чтобы они обладали повышенной отражающей способностью на определенных длинах волн, например на длинах волн радара. Чешуйки также могут быть биоразлагаемыми и разлагаться в воздухе и (или) после попадания на землю.
В качестве элементов средства трассировки могут также применяться и другие вещества (блок 509). Например, в вихревой поток можно направить очень маленькие кристаллы двуокиси углерода, где они могут отражать энергию радара. В другом варианте выполнения элементы средства трассировки могут включать в себя кристаллы, сформированные из составляющих, имеющихся на месте. Например, кристаллы могут быть образованы из окружающего водяного пара и (или) из водяного пара, присутствующего в реактивной струе двигателя. Эти кристаллы могут образовывать конверсионные следы или структуры, подобные конверсионному следу, которые можно обнаружить визуально или при помощи других детекторов. В еще одном варианте выполнения элементы средства трассировки могут обладать автономным источником питания (например, батареей) и могут испускать радиосигналы, или элементы могут принимать радиосигналы (или сигналы на других длинах волн) и в ответ испускать излучение, которое затем обнаруживают. Соответственно, эти элементы могут работать аналогично RFID-устройствам, действующим от автономного источника питания или под действием внешнего излучения. Эти элементы можно выбрать легкими по сравнению с молекулами воздуха и легко биологически разлагаемыми. Способность висеть в воздухе можно усилить, если к средству трассировки добавить газ легче воздуха или если добавить парашют или аналогичное устройство. Из микро- или наночастиц могут быть образованы трехмерные формы при помощи связующего вещества, которое позволяет частицам быстро разлагаться в присутствии водяного пара или солнечного света. Подходящие водорастворимые вещества и чувствительные к ультрафиолету вещества известны специалистам в данной области техники.
Дополнительно к средству трассировки может быть добавлена энергия для повышения обнаруживаемости (блок 510). Например, если средство трассировки в его нормальном состоянии обнаруживается плохо, к средству трассировки можно добавить энергию до выброса средства трассировки из летательного аппарата (блок 511). Энергию можно добавить к средству трассировки и после выброса (блок 512) либо в качестве дополнения к энергии перед выбросом, либо вместо нее. Например, если средство трассировки испускает энергию в течение столь короткого промежутка времени, что его трудно обнаружить, то энергию можно добавить к средству трассировки после его выброса. Если в некоторых случаях энергию легче добавить к средству трассировки после, а не до его выброса, можно использовать аналогичный процесс. В частном варианте выполнения можно перед выбросом аммиака возбудить его мазером. Если после выброса аммиак испускает энергию слишком быстро, чтобы его мог легко обнаружить детектор на летательном аппарате или на земле, то энергию можно добавить к аммиаку в ходе процесса, совершаемого после выброса, чтобы повысить вероятность обнаружения этого элемента средства трассировки. Энергию можно добавить к средствам трассировки либо от бортового источника энергии (блок 513), например от источника энергии, который находится на том же летательном аппарате, что и средство трассировки, либо от наземного источника энергии (блок 514), либо от обоих.
Как указывалось изначально со ссылкой на фиг.5, альтернативный подход к направлению физического вещества в вихревой поток (часть 505 процесса) включает в себя направление энергии в поток без ввода отдельного физического вещества (часть 515 процесса). Например, воздух, примыкающий к законцовке крыла, может быть ионизирован ионизатором воздуха, расположенным в законцовке крыла (блок 516). Предполагается, что заряженные ионы, полученные в этом процессе, отражают энергию, например энергию радара, более эффективно, чем соседние неионизированные молекулы. Соответственно, можно использовать радарный детектор для идентификации ионизированных молекул. Для ионизации можно использовать вольфрамовый излучатель электронов, и ионизации может быть подвергнута любая из составных частей воздуха в зависимости от поступающей энергии. Другие ионизаторы могут включать в себя вакуумные ультрафиолетовые ионизаторы, ионизаторы крайнего ультрафиолетового излучения и (или) излучатель рентгеновских лучей. Типичные способы ионизации включают в себя термоэлектронную эмиссию, полевую эмиссию, вторичную электронную эмиссию, фотоэлектрический эффект, катодные лучи, облучение заряженными частицами и высокоэнергетическое электромагнитное излучение. Любой из этих способов можно использовать отдельно или в сочетании для получения требуемых ионов.
В альтернативном варианте можно повысить электронное энергетическое состояние молекулы (блок 517). Вместо того чтобы заряжать молекулы в процессе ионизации, блок 517 включает в себя перемещение электронов молекулы из низкого или относительно низкого электронного энергетического состояния в более высокое электронное энергетическое состояние. Когда электроны возвращаются в низкое энергетическое состояние, они испускают излучение, которое обнаруживает наземный или находящийся в воздухе детектор. В других вариантах выполнения могут применяться другие способы направления энергии в поток (блок 518).
На фиг.9 приведен процесс 600 обнаружения наличия средств трассировки, описанных выше со ссылкой на фиг.8. Часть 601 процесса включает в себя обнаружение характеристики, связанной с наличием средства трассировки, направленного из летательного аппарата в вихревой поток. Как указано выше, средство трассировки может включать в себя физическое вещество, направленное из летательного аппарата, энергию, направленную из летательного аппарата (например, энергию, которая поглощается и переиспускается прилегающим воздухом), или сочетание физического вещества и энергии. Способы обнаружения включают в себя радарный (например, в диапазоне K для аммиака, в рентгеновском диапазоне для ионизированного воздуха, в диапазоне Kа или диапазоне W для других веществ), лидарный, инфракрасный, акустический, оптический или другие. Процесс 600 может включать в себя обнаружение характеристики с земли (блок 602) и (или) с другого летательного аппарата (блок 603). Дополнительно сигнал обнаружения, связанный с обнаружением характеристики, может анализироваться (блок 604). Например, если средства трассировки выбрасываются из летательного аппарата или иным образом создаются в ходе постоянного процесса, сигнал может анализироваться в соответствии с одной методикой (блок 605). Если элементы трассировки выбрасываются или создаются переменным во времени образом, сигнал может анализироваться в соответствии с другой методикой (блок 606).
В части 607 процесса вырабатывается ответный сигнал на основании, по меньшей мере частично, обнаружения средства трассировки, идентифицированного в блоке 601. Ответный сигнал может быть направлен к другому летательному аппарату (блок 608) или на землю (блок 610). Если ответный сигнал направлен к другому летательному аппарату, его можно также (дополнительно) направить на землю (блок 609). Если ответный сигнал направлен на землю, его можно также (дополнительно) направить на другой летательный аппарат (блок 611). Пилота можно поставить в известность об ответном сигнале при помощи визуальных, звуковых и (или) иных средств оповещения.
Часть 612 процесса включает указания маршрута летательного аппарата на основании, по меньшей мере частично, ответного сигнала. Например, следующему летательному аппарату может быть предписано уклониться от вихря (часть 613 процесса). Альтернативно (или в дополнение к этому) можно определить интервал следования до следующего летательного аппарата на основании, по меньшей мере частично, обнаружения вихря (часть 614 процесса). Альтернативно (или в дополнение к этому) можно изменить траекторию ведущего летательного аппарата (например, летательного аппарата, связанного с обнаруженным вихрем) (часть 615 процесса).
На фиг.10 приведен частично схематический и сжатый вид летательного аппарата 1110, приближающегося к наземному детектору 1131, расположенному вблизи рабочей взлетно-посадочной полосы 770. Детектор 1131 может быть выровнен относительно подлета/взлета 771 на взлетно-посадочной полосе 770. В иллюстративных целях детектор 1131 показан в конце взлетно-посадочной полосы 770, но он может также быть расположен в других точках на оси 771. Датчик 1131 может быть сконфигурирован в соответствии с любым из предыдущих вариантов выполнения и может соответственно включать в себя радарный детектор, лидарный детектор, инфракрасный детектор, акустический детектор, оптический детектор или иной подходящий прибор, выполненный с возможностью определения характеристики, связанной со средством трассировки, испускаемым летательным аппаратом 1110. В отличие от существующих детекторов детектор 1131, приведенный на фиг.10, может иметь ось 734 детектирования, которая совмещена с осью 771 подлета/взлета. По меньшей мере, по этой причине детектору 1131 не требуется направлять энергию поперек вихрей 1111 (что имеет место в случае с детекторами, основанными на эффекте Доплера), но может вместо этого определять характеристики средства трассировки в вихрях 1111 с любого угла. Предполагаемое преимущество этой конструкции состоит в том, что число детекторов, требуемых для выработки информации, используемой для направления летательного аппарата, можно значительно сократить по сравнению с существующими конструкциями. Другое предполагаемое преимущество этой конструкции состоит в том, что детектор 1131 может легче обнаружить вихри, созданные летательными аппаратами, которые не находятся на оси относительно детектора 1131, и при этом не возникает необходимость в большой сети детекторов.
Кроме того, наземный радар (например, радар, работающий в диапазоне частот K) может быть отрегулирован по азимуту и углу возвышения для обеспечения двух реперных измерений для обнаруженного вихря. При применении радара для приема импульсов энергии можно использовать селекцию по дальности для обеспечения третьего измерения, или измерения по глубине. Такая конфигурация обеспечивает трехмерную визуализацию вихрей в спутном следе.
В других вариантах выполнения наземный детектор 1131 может иметь иную конфигурацию. Например, детектор 1131 может включать в себя сеть распределенных, отделенных друг от друга элементов детектора, которые знают местоположения друг относительно друга. Каждый из этих элементов детектора может обнаружить характеристику средства трассировки. Используя информацию о фазовом сдвиге и известные расстояния между элементами детектора, система может получить томографическую карту или другое представление местоположений вихря. В частном варианте выполнения элементы детектора могут быть относительно дешевыми устройствами, размещенными на имеющихся платформах (например, на вышках сотовой связи), и могут осуществлять связь друг с другом при помощи имеющихся сетевых средств (например, при помощи сети сотовой связи).
Один отличительный признак по меньшей мере некоторых вариантов выполнения вышеприведенных систем и способов заключается в том, что они включают в себя фактическое определение характеристик, связанных с вихрями или другим вихревым потоком, для летательного аппарата на индивидуальной основе. Предполагаемое преимущество этого признака состоит в том, что во многих случаях фактические характеристики вихрей, вероятно, будут более благоприятными, чем характеристики "худшего случая", которые обычно предполагаются при определении маршрутов и интервалов следования летательных аппаратов. Соответственно, предполагается, что интервалы следования между летательными аппаратами можно уменьшить, поскольку определение интервалов следования может быть основано на фактической информации, а не на предположении худшего варианта. В других случаях идущему следом летательному аппарату можно дать указания выполнить незначительную коррекцию курса, чтобы уклониться от вихрей, и не прибегать при этом к большим интервалам следования. В результате по меньшей мере в некоторых случаях предполагается, что варианты выполнения вышеприведенных систем и способов позволят увеличить пропускную способность аэропортов на величину 50-100%.
Другим отличительным признаком по меньшей мере некоторых из вышеприведенных вариантов выполнения является то, что оборудование для испускания средства трассировки и, дополнительно, оборудование для обнаружения средства трассировки может переноситься одним или несколькими летательными аппаратами. Преимущество такого подхода в том, что можно обнаруживать вихри в районах, удаленных от аэропортов, где обычно размещается такое оборудование. В результате летательный аппарат, находящийся в удаленном районе, может принимать информацию о вихрях от летящего впереди летательного аппарата и может предпринять соответствующие действия. Повторим: предполагается, что информация, на которой основано действие, будет более точной в случае предположения худшего варианта развития событий, и соответственно, предполагается, что интервалы следования можно будет сократить.
Еще один отличительный признак по меньшей мере некоторых из вышеприведенных вариантов выполнения заключается в том, что средство трассировки не обнаруживается визуально невооруженным глазом наблюдателя, находящегося на земле, или пилотом без специальных средств в идущем следом летательном аппарате. Соответственно, эти средства трассировки непохожи на видимые дымовые следы самолета, выполняющего фигуры высшего пилотажа, или дымовые средства трассировки, используемые для визуализации потока при исследовательских или экспериментальных полетах. Преимущество этого отличительного признака состоит в том, что и в плотно заполненных диспетчерских зонах аэропортов, и в местах, удаленных от аэропортов, средство трассировки, как предполагается, не будет вносить вклад в визуальное загрязнение, что может привести к экологическим проблемам и может вызвать путаницу у пилотов летательных аппаратов.
Блок-схемы последовательности операций и блок-схемы систем, приведенные на чертежах, иллюстрируют архитектуру, функциональные возможности и работу возможных вариантов реализации систем, способов и компьютерных программных продуктов согласно различным вариантам выполнения настоящего изобретения. В этом отношении каждый блок в блок-схеме последовательности операций или блок-схемах систем может представлять модуль, сегмент или часть кода, который содержит одну или несколько исполняемых команд для реализации определенной логической функции (функций). Следует заметить, что в некоторых альтернативных вариантах реализации функции, указанные в блоке, могут выполняться не в той последовательности, что указана на чертежах. Например, два блока, изображенные последовательно, могут на самом деле исполняться по существу одновременно, или блоки могут иногда исполняться в обратном порядке в зависимости от реализуемой функциональной возможности. Следует также заметить, что каждый блок приведенных блок-схем и сочетания блоков на блок-схемах могут быть реализованы посредством аппаратных систем специального назначения, которые выполняют определенные функции или действия, или посредством сочетания специализированных аппаратных средств и компьютерных команд.
Используемая в настоящем описании терминология предназначена исключительно для описания частных вариантов выполнения и не должна ограничивать изобретение. В настоящем описании предполагается, что формы единственного числа включают в себя также формы множественного числа, если из контекста явно не следует иное. Следует понимать, что термины "содержит" и "содержащий", используемые в описании, указывают на наличие заявленных признаков, целых чисел, этапов, операций, элементов и (или) компонентов, но не исключают наличия или добавления одного или нескольких других признаков, целых чисел, этапов, операций, элементов, компонентов и (или) их групп.
Из вышесказанного должно быть понятно, что конкретные варианты выполнения были описаны с целью иллюстрации и что могут быть внесены различные изменения без отступления от изобретения. Например, можно использовать материалы тяжелее воздуха, если установлено, что сила вязкости удерживает средство трассировки в вихре в течение достаточного промежутка времени. Некоторые аспекты изобретения, описанные в контексте определенных вариантов выполнения, могут быть объединены или исключены в других вариантах выполнения. Например, полная система, приведенная на фиг.4, может включать в себя больше или меньше компонентов и (или) сочетаний компонентов. Кроме того, хотя преимущества, связанные с определенными вариантами выполнения изобретения, были описаны в контексте этих вариантов выполнения, другие варианты выполнения могут также демонстрировать такие преимущества, и не все варианты должны обязательно демонстрировать такие преимущества для нахождения в рамках объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| АКТИВНАЯ СИСТЕМА РАННЕГО РАЗРУШЕНИЯ СБЕГАЮЩИХ ВИХРЕЙ | 1998 |
|
RU2223892C2 |
| Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей | 2020 |
|
RU2758526C1 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ВОЗМОЖНОСТИ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2003 |
|
RU2324203C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2496121C1 |
| Способ определения дисперсного состава альфа-активных примесей при аварийном выбросе в атмосферу | 2021 |
|
RU2777752C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |








Изобретение относится к измерительной технике и может быть использовано в системах прогнозирования и визуализации вихрей в спутном следе летательных аппаратов. Технический результат - расширение функциональных возможностей. Для достижения данного результата способ прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе включает: сбор одного или нескольких наземных изменений, относящихся к прогнозированию местоположения, интенсивности и перемещения вихрей в спутном следе; сбор одного или нескольких бортовых измерений, относящихся к прогнозированию местоположения, интенсивности и перемещения вихрей в спутном следе; объединение наземных и (или) бортовых измерений для прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе. При этом процесс трассировки вихрей летательного аппарата включает в себя направление средства трассировки от летательного аппарата в вихревой поток, созданный летательным аппаратом. 3 н. и 12 з.п. ф-лы, 10 ил.
1. Способ прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе, и определения вихрей в спутном следе, предусматривающий: сбор (102) одного или нескольких наземных измерений, связанных с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе; сбор (104) одного или нескольких бортовых измерений, связанных с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе; объединение наземных и бортовых измерений для прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе при помощи модели предсказания вихрей в спутном следе, выбранной из множества моделей предсказания вихрей в спутном следе на основании на группы входных данных или параметров, включающих в себя наземные или бортовые измерения; и
определение вихрей в спутном следе путем использования материала или вещества средства трассировки, испускаемого летательным аппаратом (1110), создающим вихри в спутном следе, причем стадия определения вихрей в спутном следе предусматривает: направление средства трассировки от первого летательного аппарата (1110а) в вихревой поток (1111), созданный первым летательным аппаратом (1110а), причем средство трассировки является визуально неразличимым от окружающей его среды для невооруженного глаза наблюдателя, находящегося на земле или в следующем летательном аппарате (1100b), когда средство трассировки находится в вихревом потоке (1111);
обнаружение характеристики, соответствующей наличию визуально неразличимого средства трассировки, направленного в вихревой поток (1111); и
на основании, по меньшей мере, частично обнаруженной характеристики направление полета первого летательного аппарата (1110а) или второго летательного аппарата (1110b), следующего за первым летательным аппаратом (1110а), или обоих летательных аппаратов.
2. Способ по п.1, дополнительно содержащий этап, на котором распространяют информацию, относящуюся к предсказанию местоположения, интенсивности и перемещения вихрей в спутном следе, по меньшей мере службе управления воздушным движением и любым летательным аппаратам, на которые могут воздействовать вихри в спутном следе, причем распространение информации, связанной с предсказанием местоположения, интенсивности и перемещения вихрей в спутном следе, выполняется посредством системы управления информацией совместно с сетью связи.
3. Способ по п.1 или 2, в котором прогнозирование местоположения, интенсивности и перемещения вихрей в спутном следе от летательного аппарата, создающего вихри в спутном следе, предусматривает:
определение скорости летательного аппарата, создающего вихри в спутном следе;
определение типа летательного аппарата, создающего вихри в спутном следе;
определение конфигурации летательного аппарата, создающего вихри в спутном следе;
определение или прогнозирование локальных ветров в окрестности летательного аппарата, создающего вихри в спутном следе; и
отслеживание трассы летательного аппарата, создающего вихри в спутном следе.
4. Способ по п.1, в котором прогнозирование местоположения, интенсивности и перемещения вихрей в спутном следе выполняют на борту летательного аппарата, создающего вихри в спутном следе, и при этом способ дополнительно предусматривает передачу информации, связанную с прогнозированием местоположения, интенсивности и перемещения вихрей в спутном следе, идущему следом летательному аппарату.
5. Способ по п.1, в котором прогнозирование местоположения, интенсивности и перемещения вихрей в спутном следе летательного аппарата, создающего вихри в спутном следе, выполняют на наземной станции с использованием информации от летательного аппарата, создающего вихри в спутном следе, и при этом способ дополнительно предусматривает передачу информации, относящуюся к местоположению, интенсивности и перемещению вихрей в спутном следе, идущему следом летательному аппарату.
6. Способ по п.1, дополнительно предусматривающий дополнение измерений информацией со спутниковых датчиков.
7. Система прогнозирования местоположения, интенсивности и перемещения вихрей в спутном следе и определения вихрей в спутном следе, содержащая:
множество наземных датчиков для сбора данных, относящихся к прогнозированию местоположения, интенсивности и перемещения вихрей в спутном следе; систему управления информации и сеть связи для приема данных бортовых измерений, относящихся к прогнозированию местоположения, интенсивности и перемещения вихрей в спутном следе, и приема данных от множества наземных датчиков; модель прогнозирования вихрей в спутном следе, выбранную из множества моделей прогнозирования вихрей в спутном следе для прогнозирования, по меньшей мере, местоположения, интенсивности и перемещения вихрей в спутном следе от множества наземных датчиков и данных бортовых измерений; и систему трассировки вихрей, включающую:
детектор трассировки, расположенный на первом летательном аппарате для направления средства трассировки в вихревой поток, образованный первым летательным аппаратом, причем средство трассировки является визуально неразличимым от его окружающей среды для невооруженного глаза наблюдателя, находящегося на земле или в следующем летательном аппарате, когда средство трассировки находится в вихревом потоке; детектор трассировки для обнаружения характеристики, соответствующей наличию визуально неразличимого средства трассировки, направленного в вихревой поток; и сеть связи для направления полета первого летательного аппарата или второго летательного аппарата, следующего за первым летательным аппаратом, или обоих летательных аппаратов на основании, по меньшей мере, частично обнаруженной характеристики.
8. Система по п.7, дополнительно содержащая интеграционную модель для определения местоположения, интенсивности и перемещения вихрей в спутном следе на основании сочетания данных, собранных датчиками, и данных от модели предсказания вихрей в спутном следе.
9. Система по п.7 или 8, дополнительно содержащая процесс принятия решения о предпринимаемых действиях для соединения информации об обнаружении и прогнозирования вихрей в спутном следе, информации о разнесении летательных аппаратов и информации об эксплуатационном состоянии системы управления воздушным движением для корректировки графиков системы управления воздушным движением для отражения любых изменений, связанных с требованиями разнесения летательных аппаратов в зависимости от вихрей в спутном следе.
10. Система по п.7, в которой бортовые данные, принятые через систему управления информацией и сеть связи, содержат:
скорость выбранного летательного аппарата, создающего вихри в спутном следе;
тип выбранного летательного аппарата;
конфигурацию выбранного летательного аппарата; и
локальные ветры в окрестности выбранного летательного аппарата.
11. Система по п.7, в которой бортовые данные, принятые системой управления информацией и сетью связи, содержат данные от выбранного летательного аппарата, создающего вихри в спутном следе, и данные от другого летательного аппарата.
12. Система по п.7, в которой система управления информацией и сеть связи собирает информацию о ветре, по меньшей мере, от одного из множества летательных аппаратов, приземляющихся друг за другом, и от множества наземных датчиков.
13. Летательный аппарат, содержащий:
множество датчиков для определения, по меньшей мере, скорости летательного аппарата и конфигурации самолета;
средство прогнозирования вихрей в спутном следе для прогнозирования, по меньшей мере, местоположения и интенсивности вихрей в спутном следе, создаваемых летательных аппаратом, на основании, по меньшей мере, скорости и конфигурации летательного аппарата;
передатчик для передачи информации о вихрях в спутном следе, соответствующей, по меньшей мере, предсказанному местоположению и интенсивности вихрей в спутном следе, по меньшей мере, идущему следом летательному аппарату; и систему трассировки вихрей, включающую:
детектор трассировки, расположенный на первом летательном аппарате для направления средства трассировки в вихревой поток, образованный первым летательным аппаратом, причем средство трассировки является визуально неразличимым от его окружающей среды для невооруженного глаза наблюдателя, находящегося на земле или в следующем летательном аппарате, когда средство трассировки находится в вихревом потоке;
детектор трассировки для обнаружения характеристики, соответствующей наличию визуально неразличимого средства трассировки, направленного в вихревой поток; и сеть связи для направления полета первого летательного аппарата или второго летательного аппарата, следующего за первым летательным аппаратом, или обоих летательных аппаратов на основании, по меньшей мере, частично обнаруженной характеристики.
14. Летательный аппарат по п.13, дополнительно содержащий дисплей для создания представления местоположения, интенсивности и предсказанного перемещения вихрей в спутном следе другого летательного аппарата относительно летательного аппарата.
15. Летательный аппарат по п.13 или 14, содержащий:
полезный объем;
несущую поверхность, расположенную для создания подъемной силы и связанного с ней вихревого потока; и
бортовую систему трассировки вихревого потока, которая содержит:
средство направления средства трассировки, расположенное таким образом, чтобы направлять средство трассировки в вихревой поток, созданный несущей поверхностью, причем средство трассировки визуально неотличимо от окружающей его среды для невооруженного глаза наблюдателя, находящегося на земле или в идущем следом летательном аппарате, когда средство трассировки находится в вихревом потоке; и
контроллер, функционально связанный со средством направления средства трассировки для избирательного включения средства направления средства трассировки.
| US 7017862 В1, 28.03.2006 | |||
| DE 10039109 А1, 28.02.2002 | |||
| WO 2005010554 А1, 03.02.2005 | |||
| US 20030222795 А1, 04.12.2003 | |||
| JP 2005084697 А, 31.03.2005. |

