Изобретение относится к области авиационной техники и может применяться для управления группой беспилотных летательных аппаратов (БПЛА).
Известен способ организации воздушного движения совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве (патент RU 2750509, МПК G08G 5/00, опубл. 29.06.2021), заключающийся в том, что создают региональные центры контроля полетов пилотируемых и беспилотных авиационных систем (БАС) в общем воздушном пространстве, региональный центр и каждую БАС оснащают соответственно наземным и бортовым автоматизированными программными комплексами, которые реализуют логику и архитектуру единого информационного поля, причем автоматизированный бортовой программный комплекс включает программный комплекс автоматизированной диагностики ответственных узлов БАС с оценкой их остаточного ресурса и предотказного состояния, программный комплекс автоматизированного определения своего местоположения и прогнозирования параметров полета с учетом уточненного текущего положения, программный комплекс автоматизированного формирования прогнозируемых параметров полета всех БАС, программный комплекс автоматизированного формирования общей карты окружающего пространства с прогнозируемыми параметрами полета всех БАС, программный комплекс автоматизированного формирования структуры и параметров многопозиционной системы наблюдения санкционированных БАС, программный комплекс автоматизированного выявления несанкционированных полетов БАС, программу диспетчер, объединяющую программные комплексы БАС, а автоматизированный наземный программный комплекс включает программный комплекс автоматизированного формирования базы данных зарегистрированных БАС с присвоением им регистрационного номера.
Недостатками данного способа являются обязательное наличие наземного программного комплекса, такого как центр принятия решений, и ограниченность применения только сферой гражданской авиации.
Известен многофункциональный центр управления движением и моделирования динамики летательных аппаратов (патент RU 2646784, МПК G08G 5/00, опубл. 07.03.2018), содержащий быстровозводимые здания в виде сборно-разборных модулей каркасной конструкции, каналы связи, установленное с возможностью подключения к каналам связи технологическое оборудование, имеющие специализированное программное обеспечение командный блок, учебный блок, серверный блок, навигационный блок, пользовательский блок, мобильный блок и блок наземных робототехнических средств, при этом командный блок содержит источник бесперебойного питания командного блока, пульт связи с подключенными к нему радиостанцией, громкоговорителем и диспетчерским пультом, дополнительно подключенный к последнему дополнительный пульт связи с подключенной к нему дополнительной радиостанцией, блок электронно-вычислительных машин, каждая из которых подключена к каналам связи, блок мониторов, подключенные к каналам связи наземные приемные станции, хранилище данных, средства визуального контроля и комплекс документирования воздушной информации, к которому дополнительно подключен каждый монитор блока мониторов, систему устройств видеоконференцсвязи, каждое из которых включает в себя блок видеоконференцсвязи с подключенными к нему управляемой камерой, динамиком, микрофоном и подключенным к каналам связи автоматизированным рабочим местом, учебный блок содержит учебный класс с элементами класса, каждый из которых выполнен в виде блока устройств визуализации, каждое из которых подключено к пользовательской электронно-вычислительной машине.
Недостатками данного изобретения являются наличие только наземной составляющей управления беспилотными летательными аппаратами, без возможности осуществлять данную функцию с борта пилотируемого летательного аппарата.
Известен способ управления движением летательных аппаратов (патент RU 2769017, МПК G08G 5/00, опубл. 28.03.2022), содержащий этапы, на которых принимают данные, касающиеся местоположения летательных аппаратов; создают карту движения летательных аппаратов в режиме реального времени на основе указанных данных местоположения; проверяют возможность столкновения летательных аппаратов на основе карты; и в случае если такая проверка дает положительный результат, отправляют предупреждение о возможном столкновении на летательные аппараты; при этом упомянутый способ осуществляют посредством сервера реального времени (RTS-сервера) (120), выполненного с возможностью осуществлять связь с навигационными приборами (130), расположенными на борту летательных аппаратов и оснащенными приложением (150), выполненным с возможностью передавать данные о положении летательных аппаратов на RTS-сервер (120) и определять идеальный маршрут и идеальную высоту полета в соответствии с правилами визуального полета (VFR) и областями пролета, определенными аэронавигационным картографированием, причем упомянутое приложение взаимодействует с системой управления полетом летательных аппаратов.
Недостатками данного способа являются ограниченность функционала, направленного, в основном, на предотвращение столкновений в воздухе, и обязательное наличие наземного пункта управления.
Техническая задача, решаемая с использованием данного способа, состоит в необходимости обеспечить применение (управление) группы беспилотных летательных аппаратов одним летчиком-оператором
Технический результат, достигаемый при реализации разработанного способа, состоит в повышении эффективности управления группой беспилотных летательных аппаратов одним летчиком-оператором, повышении эффективности ее применения и расширении функционала по управлению группой беспилотных летательных аппаратов.
Для достижения указанного технического результата предложено использовать разработанный способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора характеризующийся тем, что в состав бортового оборудования пилотируемого летательного аппарата вводят сервер-агрегатор, использующий в своей работе технологии искусственного интеллекта, применяемые для построения программы применения отдельного беспилотного летательного аппарата (БПЛА) или группы БПЛА, при этом с каждого БПЛА, входящего в группу, передается по радиоканалу в систему связи пилотируемого летательного аппарата информация об обнаруженных БПЛА объектах и их характеристиках, а также информация о конфигурации БПЛА и текущем состоянии его систем, которая затем по сетевому каналу через бортовую цифровую вычислительную машину (БЦВМ) поступает в сервер-агрегатор, при этом дополнительно к этой информации от БЦВМ в сервер-агрегатор передается информация о местоположении, высотно-скоростных параметрах обнаруженных объектов, о радиолокационной и меиеорологической обстановке и характеристиках радиоконтрастных объектов, о текущей обстановке в оптическом и инфракрасном диапазоне, а также информация о полетном задании и цифровая карта местности с объектным составом, при этом по видеоканалу через блок преобразования телевизионных сигналов в сервер-агрегатор поступает теле-видеоинформация от группы БПЛА, в том числе радиоизображение и изображение в оптическом и/или инфракрасном диапазонах, затем после комплексной обработки поступившей информации в сервере-агрегаторе синтезируется единое тактическо-информационное поле и программы применения группы БПЛА или отдельных БПЛА, которые поступают для подтверждения на индикатор летчику-оператору и после его одобрения передаются по сетевому каналу информационного взаимодействия в систему связи для дальнейшей передачи по радиоканалу в каждый БПЛА группы, при этом, в случае несогласия летчика-оператора с предложенными программами применения БПЛА, ему предоставляется возможность вручную через органы управления индикатора задавать параметры применения для любого БПЛА группы или группы БПЛА в целом. Способ также характеризуется тем, что сервере-агрегаторе используется информация, получаемая по радиоканалу системой связи в том числе от наземного пункта управления.
Достижение приведенного технического результата достигается за счет:
a) внедрения в состав бортовой вычислительной системы нового вычислительного блока - сервер-агрегатор;
b) применения в сервере-агрегаторе технологий искусственного интеллекта («Методы и технологии искусственного интеллекта» Рутковский Л. - М.: Горячая линия-Телеком, 2010, - 520 с.; «Искусственный интеллект и интеллектуальные системы управления» Макаров И.М. - Отделение информационных технологий и вычислительных систем. - М.: Наука, 2006, -333 с.),
c) использования метода комплексной обработки информации для построения программ применения БПЛА, поступающей от всех БПЛА группы, бортовых систем обнаружения (локатор, оптическая система и др.), взаимодействующих летательных аппаратов (ЛА) и наземного пункта управления (НПУ).
В большинстве вариантов реализации предлагаемого способа:
- сетевой канал информационного обмена (СКИО) представляет собой полнодуплексные линии связи и информационного обмена по технологии FC (Fiber Channel) на основе волоконно-оптических каналов связи.
- видеоканал информационного обмена (ВКИО) представляет собой линии связи, по которым осуществляется передача видеоизображения (например, по стандартам ARINC 818, HDMI, LVDS и другие).
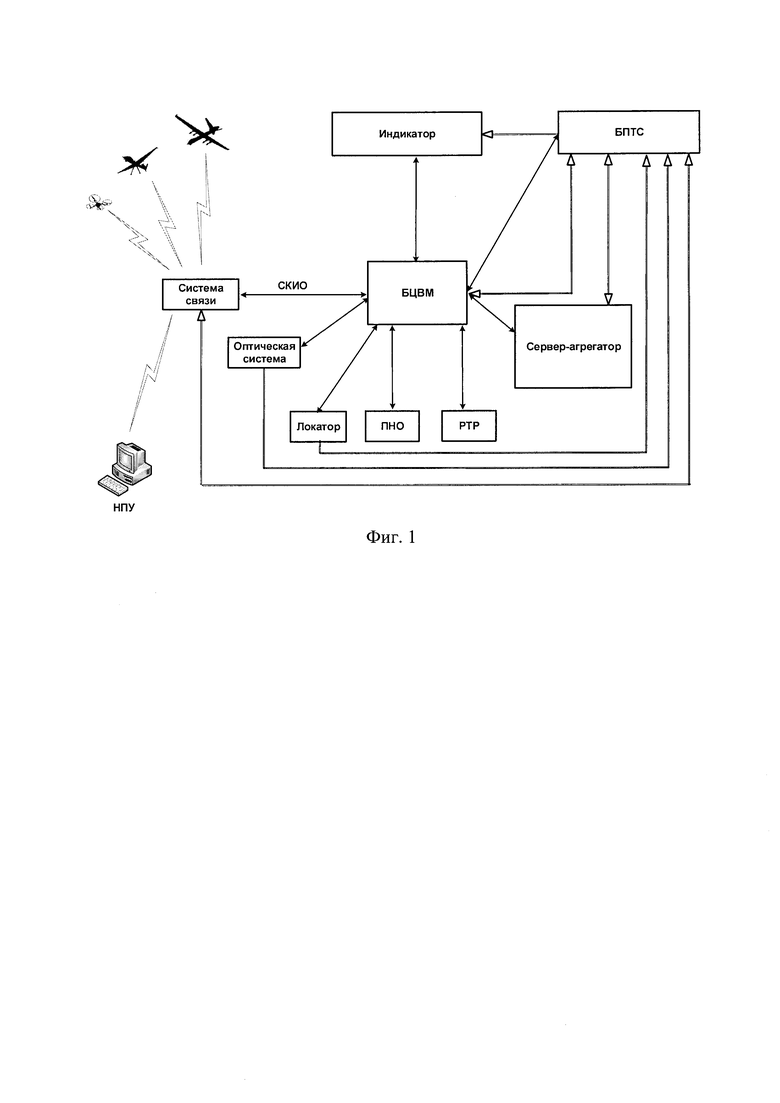
- бортовая цифровая вычислительная машина (БЦВМ) представляет собой устройство вычислительной техники, построенное на основе одно- или многопроцессорной архитектуре и предназначенное для выполнения алгоритмических задач и/или построения графических объектов. Она соединена входами/выходами по СКИО с системой связи, сервером-агрегатором, блоком преобразования телевизионной информации (БПТС), индикаторами в кабине, пилотажно-иавигационным оборудованием и другими бортовыми системами, а также входами/выходами по ВКИО через БПТС с индикаторами в кабине, системой связи.
- сервер-агрегатор представляет собой устройство вычислительной техники, в котором реализованы технологии искусственного интеллекта (в частности машинного обучения, нейросетевых технологий, нечеткой логики). Сервер-агрегатор предназначен для анализа текущей тактической ситуации и выработки оптимального решения для выполнения текущей задачи как отдельными БПЛА, так и их группой или самолетом-оператором. Он соединен входами/выходами по СКИО с БЦВМ и, через БЦВМ, с индикатором оператора и системой связи, а также входами/выходами по ВКИО через БПТС с индикатором оператора, системой связи, оптической системой и локатором.
- БПТС представляет собой устройство для приема, коммутации, преобразования и выдачи видео и телевизионных сигналов (изображений), поступающих на его входы, как в аналоговой, так и в цифровой форме.
Для повышения эффективности применения группы БПЛА при централизованном управлении с воздушного пункта одним летчиком-оператором необходимо решение на его борту ряда частных функциональных задач, требующих выполнения комплексного анализа окружающей обстановки и принятия решений по управлению траекторией полета группы БПЛА и работой их бортовых систем. Комплексный анализ окружающей обстановки основан на автоматическом обнаружении и распознавании объектов интереса, а также формировании соответствующих оценок выполнения условий полета группы БПЛА. Алгоритмы принятия решений должны учитывать оперативно возникающие факторы и угрозы внешней среды (тактическая ситуация, траекторные флюктуации, метеорологическая обстановка), отказы и повреждения и принимать необходимое решение, эффективное в текущих условиях в зависимости от текущей задачи. Например, оперативное формирование маршрута полета БПЛА при выполнении задач полета с учетом оперативно возникающих опасных факторов (противовоздушные средства, искусственные объекты на земле, метеорологическая обстановка) с учетом координат и параметров движения и структуры выявленных групп объектов интереса, оборонительное или тактическое маневрирование.
Формализация принципов решения указанных видов задач для применения алгоритмического аппарата с конечными состояниями затруднена или практически невозможна из-за множества необходимых учитываемых факторов объектов и среды, наличия свойств неоднозначности и неопределенности их параметров, наличия значительного множества вариантов развития ситуаций. В то же время решение значительной части подобных задач возможно путем применения технологий искусственного интеллекта, преимущественно с использованием машинного обучения на основе нейросетей. При этом каждая указанная частная задача требует создания и обучения собственной нейросети.
Поэтому применение нейросетевых технологий и машинного обучения требует значительных вычислительных ресурсов, которые с учетом специализированного характера вычислений могут быть достигнуты применением нейронных процессоров. В свою очередь нейропроцессоры на авиационной технике должны работать в условиях особых внешних воздействующих факторов. Это требует создания вычислительных средств с нейропроцессорами в авиационном исполнении.
В качестве примера на фиг. 1 приведен бортовой комплекс, состоящий из следующих элементов: система связи, оптическая станции, радиолокатор, система радиотехнической разведки (РТР), пилотажно-навигационное оборудование (ПНО), индикатор, блок преобразования телевизионных сигналов, бортовая цифровая вычислительная машина и сервер-агрегатор.
Но такой вариант выполнения системы не ограничивает осуществление способа, а приведен только в качестве примера.
Разработанный способ функционирует следующим образом, представленным на примере фигуры 1.
В состав бортовых систем пилотируемого летательного аппарата включается сервер-агрегатор.
Полетное задание, содержащее варианты задач для каждого БПЛА группы, а также самолета-оператора, на земле загружается в БЦВМ самолета-оператора. Возможно его изменение в процессе полета по командам с НПУ, поступившим на борт по радиоканалу через систему связи, откуда по СКИО они передаются в БЦВМ.
На индикаторе летчика-оператора на борту отображаются варианты задач для каждого БПЛА, полученные по СКИО от БЦВМ. Летчик-оператор выбирает задачу, которая передается по СКИО через БЦВМ в сервер-агрегатор. При необходимости задачи могут быть перевыбраны в процессе полета.
В БЦВМ по СКИО поступает информация о местоположении и высотно-скоростных параметрах от пилотажно-навигационного оборудования, информация о радиолокационной обстановке и характеристики радиоконтрастных объектов от радиолокатора, информация об обстановке в оптическом и инфракрасном диапазоне от оптической станции, информация об источниках излучения от системы радиотехнической разведки. В целях повышения эффективности и качества решения задач (например, повышение точности определения собственного местоположения) данная информация в БЦВМ обрабатывается и комплексируется.
Для создания комплексной картины тактической обстановки (комплексирование информации) в обеспечение успешного выполнения задач в сервер-агрегатор поступает информация с каждого БПЛА группы о его состоянии, вооружении, местоположении, запасе топлива, а также информация о характеристиках обнаруженных группой БПЛА объектов (при наличии у БПЛА соответствующей аппаратуры, например, радиолокационной, оптической системы, РТР и др.), которая может включать в себя в том числе информацию о местоположении объектов, направлении движения, скорости, вида объекта и т.п., передаваемая по радиоканалу в систему связи пилотируемого летательного аппарата. Также в сервер-агрегатор по СКИО от БЦВМ поступает скомплексированная информация о местоположении и высотно-скоростных, о радиолокационной обстановке и характеристиках радиоконтрастных объектов (азимут, угол места, дальность, скорость), информация об обстановке в оптическом и инфракрасном диапазоне, информация об источниках излучения, полетное задание и цифровая карта местности (в виде матрицы высот и объектного состава (различные базы данных, например, инженерных сооружений, опасных зон, справочной информации, весовые коэффициенты т.д.).
Также в целях комплексного распознавания объектов в сервер-агрегатор через БПТС по ВКИО поступает видеоизображение с БПЛА, которое передается по радиоканалу в систему связи, и видеоизображение от локатора и оптической системы самолета.
На основании полученной информации и выбранных оператором задач, сервер-агрегатор с использованием алгоритмов искусственного интеллекта:
проводит распознавание и идентификацию объектов на видеоизображении, комплексируя его из различных вышеуказанных источников;
- создает (синтезирует) единое тактическо-информационное поле, содержащее совокупность информации (координаты, тип объекта, скорость и т.д.) о всех известных объектах, в том числе наземных и морских, влияющих или могущих повлиять на выполнение полетного задания (самолеты, БПЛА, радиолокационные станции, средства ПВО, ракеты, метеорологическая обстановка и т.д.).
- разрабатывает оптимальную программу применения для каждого выбранного БПЛА группы. Программа применения может включать маршрут БПЛА, разрешения/запрет на использование БПЛА средств наблюдения и обнаружения, а также целевых нагрузок, включение/отключение у БПЛА режима радиомолчания и др.
Информация о распознанных и идентифицированных объектов передаются в БЦВМ для использования в целевых алгоритмах и отображения экипажу на экране индикаторов.
Вариант(-ы) программы применения передается для индикации летчику-оператору, который может их подтвердить, изменить или отменить. При этом, в случае, если полетное задание предусматривает использование группы БПЛА для выполнения задания сервер-агрегатор подготавливает и направляет на индикацию единую программу применения для требуемой группы БПЛА. Летчик-оператор может одобрить программу целиком или откорректировать задачи и/или программу для каждого БПЛА группы.
В случае подтверждения элементы маршрута и команды управления передаются для исполнения в БПЛА через систему связи.
При изменении элементов программы применения летчиком-оператором или вследствие изменения внешней обстановки, состояния БПЛА и поступлении внешних команд, делающих необходимым корректировку программы применения, сервер-агрегатор формирует новый вариант программы применения, который также передается летчику-оператору для подтверждения или отмены.
В случае несогласия с предложенной сервером-агрегатором программой применения БПЛА управление переходит непосредственно к летчику-оператору. С помощью органов управления индикатора в кабине летчик-оператор выставляет требуемые параметры программы применения для БПЛА, например, роль БПЛА, маршрут движения, аспекты применения полезной нагрузки и т.д. Также возможен вариант непосредственного управления летчиком-оператором одним из БПЛА группы с помощью отдельных органов управления в кабине, например, с помощью джойстика, трекбола и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО НАБЛЮДЕНИЯ, КОНТРОЛЯ И УПРАВЛЕНИЯ НАД ПОЛЕТАМИ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2019 |
|
RU2710983C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВОЗДУШНОГО ДВИЖЕНИЯ С ФОРМИРОВАНИЕМ ПРИНЦИПОВ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА ДЛЯ ОСУЩЕСТВЛЕНИЯ БЕЗОПАСНЫХ СОВМЕСТНЫХ ПОЛЕТОВ ПИЛОТИРУЕМОЙ И БЕСПИЛОТНОЙ АВИАЦИИ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2020 |
|
RU2750509C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
Изобретение относится к способу обеспечения централизованного управления группы беспилотных летательных аппаратов (БПЛА). Для централизованного управления группой БПЛА с каждого БПЛА группы передают по радиоканалу в систему связи пилотируемого летательного аппарата, осуществляющего управление группой, информацию о его конфигурации и состоянии его систем, радиолокационной и метеорологической обстановке, текущей обстановке в оптическом и/или инфракрасном диапазоне, информацию о полетном задании, цифровую карту местности с объектным составом, а также информацию об обнаруженных БПЛА объектах и их характеристиках. Полученная информация поступает в сервер-агрегатор для проведения комплексной обработки, в результате которой формируют единое тактическо-информационное поле, а также программы применения БПЛА группы, которые передают для подтверждения летчику-оператору. При этом летчик-оператор может задавать параметры применения вручную в случае несогласия с предложенными. Обеспечивается повышение эффективности управления группой беспилотных летательных аппаратов летчиком-оператором. 1 з.п. ф-лы, 1 ил.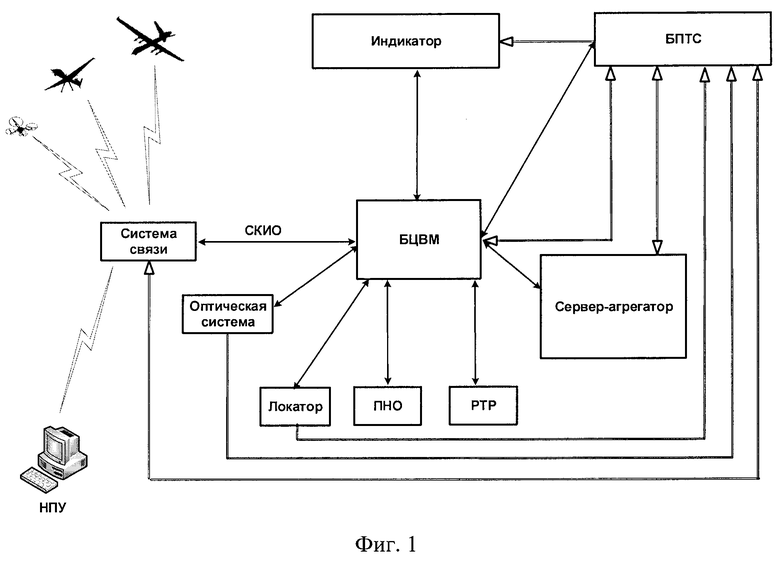
1. Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора, характеризующийся тем, что в состав бортового оборудования пилотируемого летательного аппарата вводят сервер-агрегатор, использующий в своей работе технологии искусственного интеллекта, применяемые для построения программы применения отдельного беспилотного летательного аппарата (БПЛА) или группы БПЛА, при этом с каждого БПЛА, входящего в группу, передается по радиоканалу в систему связи пилотируемого летательного аппарата информация об обнаруженных БПЛА объектах и их характеристиках, а также информация о конфигурации БПЛА и текущем состоянии его систем, которая затем по сетевому каналу через бортовую цифровую вычислительную машину (БЦВМ) поступает в сервер-агрегатор, при этом дополнительно к этой информации от БЦВМ в сервер-агрегатор передается информация о местоположении, высотно-скоростных параметрах обнаруженных объектов, о радиолокационной и метеорологической обстановке и характеристиках радиоконтрастных объектов, о текущей обстановке в оптическом и инфракрасном диапазоне, а также информация о полетном задании и цифровая карта местности с объектным составом, при этом по видеоканалу через блок преобразования телевизионных сигналов в сервер-агрегатор поступает теле-видеоинформация от группы БПЛА, в том числе радиоизображение и изображение в оптическом и/или инфракрасном диапазонах, затем после комплексной обработки поступившей информации в сервере-агрегаторе синтезируется единое тактическо-информационное поле и программы применения группы БПЛА или отдельных БПЛА, которые поступают для подтверждения на индикатор летчику-оператору и после его одобрения передаются по сетевому каналу информационного взаимодействия в систему связи для дальнейшей передачи по радиоканалу в каждый БПЛА группы, при этом в случае несогласия летчика-оператора с предложенными программами применения БПЛА ему предоставляется возможность вручную через органы управления индикатора задавать параметры применения для любого БПЛА группы или группы БПЛА в целом.
2. Способ по п. 1, отличающийся тем, что в сервере-агрегаторе используется информация, получаемая по радиоканалу системой связи в том числе от наземного пункта управления.
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ДВИЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ MESH-СЕТИ | 2021 |
|
RU2788046C1 |
| US 11410562 B1, 09.08.2022 | |||
| US 11557213 B1, 17.01.2023 | |||
| US 20220351629 A1, 03.11.2022 | |||
| US 20200043348 A1, 06.02.2020 | |||
| US 20200294322 A1, 17.09.2020. | |||
