Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известно многофункциональное медицинское устройство (см. Большая медицинская энциклопедия, т.5, стр.417, рис.1), включающее операционный стол, предназначенное для проведения хирургических операций, которое позиционно связано с инструментальным столом и расположено на жестком основании, в котором с нижней его части расположены две пары колес для перемещения операционного стола (прототип).
Известный прототип имеет технологические возможности, которые заключаются в том, что он предназначен для решения конкретной задачи и не может быть применен в робототехнической системе, которая предполагает многофункциональное оснащение различными диагностическими и хирургическими автоматизированными инструментами.
Недостатком прототипа является конструктивная невозможность расширения функциональных возможностей прототипа, поскольку сама конструкция жесткого основания стола не позволяет функциональному оснащению его. И это связано с тем, что в робототехнической системе предполагается возможность возвратно-поступательного перемещения различных диагностических и хирургических инструментов вдоль хирургического стола. Поскольку процедуры должны выполняться на любом участке тела пациента.
Техническим результатом предложенного изобретения является расширение функциональных возможностей хирургического стола за счет введение продольных направляющих в жестком основании хирургического стола, которые могут быть использованы для дальнейшего функционального насыщения различными манипуляторами, что приведет к расширению области применения данной конструкции хирургического стола.
Указанный технический результат достигается следующим медицинским хирургическим столом для робототехнической системы.
Медицинский хирургический стол робототехнической системы, включающий операционный стол, предназначенный для проведения хирургических операций, позиционно связан с инструментальным столом и расположен на жестком основании, в котором с нижней его части расположены две пары колес для перемещения операционного стола, при этом основание стола выполнено в виде конструкции, в углах которой расположены цилиндрические трубки (трубы, патрубка), имеющие незамкнутую форму окружности, при этом верхние части - концы цилиндрических трубок зафиксированы посредством П-образного профиля жесткости, который ориентирован поперек операционного стола, а нижние ее части - концы выполнены смещенными попарно в направлении друг друга и зафиксированы посредством вторых П-образных профилей жесткости, которые ориентированы вдоль операционного стола, при этом на противоположных П-образных профилях жесткости по краям расположены цилиндрические направляющие, которые также жестко закреплены на них.
При этом медицинский хирургический стол робототехнической системы выполнен из нижней и верхней частей стола, которые соединены между собой фиксирующими элементами, при этом с нижней части стола расположены в углах треугольника три шарнирных элемента, выполненные с возможностью разворота, подвижная часть которых расположена в соосных отверстиях, которые выполнены в П-образных профилях, расположенных на меньшей стороне прямоугольной конструкции, при этом на П-образных профилях, расположенных на большей стороне конструкции, на их противоположных концах расположены первый и второй цилиндрические стержни жесткости, на одном из которых в средней его части шарнирно расположен первый упор с одним или с двумя роликами, которые находятся в направляющем пазу, который выполнен с нижней части стола и ориентирован вдоль него, при этом первый упор расположен на боковой плоскости многогранника со смещенной осью вращения, который жестко закреплен на первом цилиндрическом стержне, который связан посредством зубчатой передачи с первым шаговым двигателем для его разворота, а на другом цилиндрическом стержне жесткости по его краям расположены с возможностью разворота два дополнительных упора с роликами, которые также расположены в направляющих пазах с нижней части стола по краям стола и функционально связаны с боковой плоскостью двух других многогранников со смещенной осью вращения, которые шарнирно расположены на втором цилиндрическом стержне жесткости, при этом два других многогранника зубчатой передачей связаны с двумя другими шаговыми двигателями подъема и разворота стола.
При этом на верхней съемной части стола вдоль него расположена цилиндрическая направляющая, на которой расположена втулка инструментального стола с возможностью продольного перемещения вдоль направляющей и шарнирно связана с цилиндрической направляющей, закрепленной на П-образных профилях, которые расположены на меньшей стороне прямоугольной конструкции.
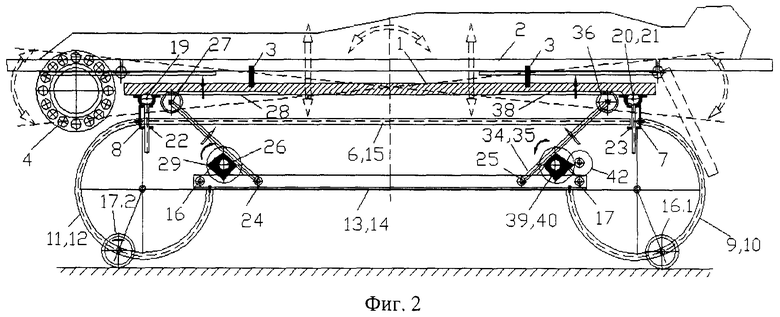
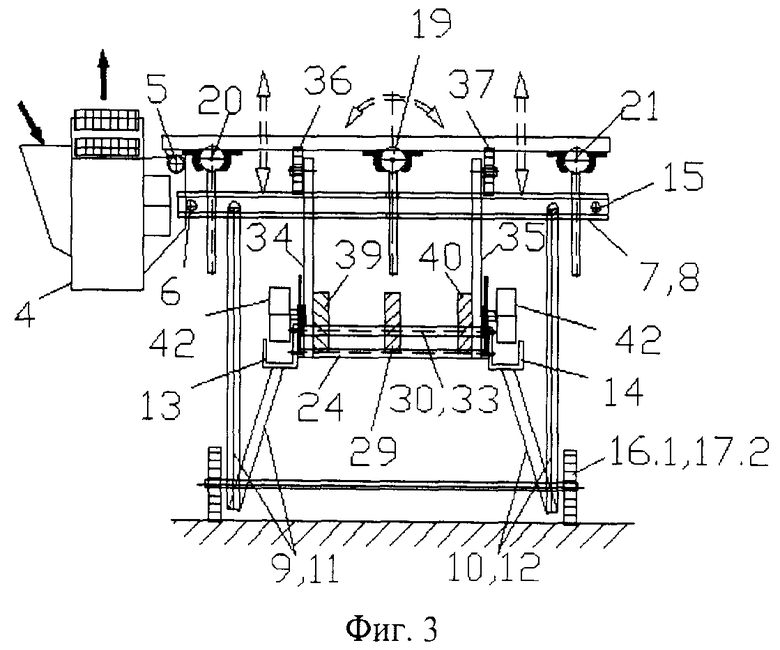
На фиг.1-3 изображен медицинский хирургический стол для робототехнической системы в трех позициях.
Медицинский хирургический стол робототехнической системы включает операционный стол, предназначенный для проведения хирургических операций, который выполнен из нижней 1 и верхней 2 частей стола, соединенных фиксирующими элементами 3. Инструментальный стол 4 посредством втулки шарнирно расположен на продольном стержне 5 (фиг.3), который расположен на нижней части стола 1 и ориентирован вдоль него. При этом инструментальный стол 4 шарнирно опирается на цилиндрическую направляющую 6, которая жестко зафиксирована между П-образными профилями жесткости 7 и 8, которые ориентированы поперек операционного стола 1. Основание стола выполнено в виде конструкции, в углах которой расположены цилиндрические трубки 9, 10, 11, 12 и имеют форму незамкнутой окружности, при этом верхние части - концы цилиндрических трубок зафиксированы посредством П-образных профилей жесткости 7 и 8. При этом П- образные профили жесткости 7 и 8 ориентированы поперек операционного стола 1. Нижние части - концы цилиндрических трубок 9, 10, 11, 12, имеющие форму незамкнутой окружности, выполнены смещенными попарно в направлении друг друга и зафиксированы посредством вторых П-образных профилей жесткости 13 и 14 (фиг.3) ориентированы вдоль операционного стола 1. При этом на противоположных П-образных профилях жесткости 7, 8 и 13, 14 по краям расположены цилиндрические направляющие 6, 15 (фиг.3) и 16, 17 (фиг.2), которые жестко закреплены на них. В нижней части цилиндрических трубок 9,10 и 11, 12 шарнирно расположены две пары колес 16.1 и 17.2 для перемещения операционного стола. При этом с нижней части стола 1 в углах треугольника 18 расположены три шарнирных элемента 19, 20 и 21 (фиг.3), выполненные с возможностью разворота, а подвижная часть их расположена в соосных отверстиях 22 и 23 (фиг.2), выполненных в П-образных профилях 7 и 8, которые расположены на меньшей стороне конструкции. При этом на противоположных концах П-образных профилей 13 и 14 расположены первый и второй цилиндрические стержни жесткости 24 и 25 (фиг.2). На первом цилиндрическом стержне 24 в средней его части шарнирно расположен первый упор 26 с одним или с двумя роликами 27, которые находятся в направляющем пазу 28, который выполнен с нижней части стола 1 и ориентирован вдоль него. При этом первый упор 26 расположен на боковой плоскости многогранника 29 со смещенной осью вращения, а многогранник 29 жестко закреплен на первом цилиндрическом стержне 30 для совместного вращения посредством зубчатой передачи 31 (фиг.1) и шагового двигателя 32 для разворота и поднятия стола 1. На другом цилиндрическом стержне жесткости 33 (фиг.1) по его краям расположены с возможностью разворота два дополнительных упора 34 и 35 с роликами 36 и 37, которые также расположены в направляющих пазах 38 (фиг.2) с нижней части стола 1 по его краям. При этом два дополнительных упора 34 и 35 функционально связаны с боковой плоскостью двух многогранников 39 и 40 со смещенной осью вращения, которые шарнирно расположены на втором цилиндрическом стержне жесткости 33 (фиг.1). При этом многогранники 39 и 40 зубчатой передачей 41 связаны с двумя шаговыми двигателями 42 подъема и разворота стола.
Медицинский хирургический стол в данном исполнении может быть использован для проведения обычной хирургической операции, поскольку позволяет при одновременном развороте многогранников 29 и 39, 40 изменять угол наклона первого упора 26 с одним или с двумя роликами 27 и двух дополнительных упоров 34 и 35 с роликами 36 и 37, что приводит к подъему и опусканию стола 1, 2. При подъеме и опускании стола 1, 2 ролики 27 и 36, 37 (фиг.2) перемещаются в пазах 28 и 38, при этом три шарнирных элемента 19, 20 и 21 также одновременно перемещаются вверх и вниз в соосных отверстиях 22 и 23 П-образных профилей 7 и 8. В случае, если возникает необходимость развернуть стол 1, 2 под каким-то углом, то разворот многогранников 29 и 39, 40 выполняется в зависимости от направления разворота стола 1, 2. Следует отметить, что в исходном положении многогранники 29 и 39, 40 угол наклона упоров 26, 34 и 35 удерживают в среднем его значении так, что есть возможность увеличения или уменьшения угла их наклона. Поэтому для ориентации продольного направления стола под углом многогранник 29 разворачивают посредством шагового двигателя 32 (фиг.1) с уменьшением или с увеличением угла наклона упора 26, а многогранники 39, 40 разворачивают посредством шаговых двигателей 42 с увеличением или с уменьшением угла наклона упоров 34 и 35. В результате одна сторона стола 1, 2 опускается, а другая сторона стола 1, 2 подымается, что приводит к необходимой ориентации его под заданным углом. Возможен также разворот стола поперек продольного его направления и в этом случае выполняют разворот только многогранников 39 и 40. При этом следует отметить, что введенные три шарнирных элемента 19, 20 и 21 обеспечивают устойчивое положение стола 1, 2 относительно основания стола, на котором расположен механизм разворота и подъема его.
Предложенная конструкция стола имеет возможность и для функционального насыщения различными робототехническими устройствами, что позволяет конструкция жесткого его основания. С одной стороны, на уголках 13 и 14 могут быть закреплены различные диагностические устройства, а цилиндрические направляющие 15, 16, 17 и 18 могут быть использованы для позиционного сканирования вдоль и поперек хирургического стола как снизу, так и сверху. При этом верхние крайние части хирургического стола 2 выполнены с возможностью разворота для фиксации головы и конечностей пациента дополнительными приспособлениями при проведении как обычной, так и робототехнической хирургической операции. С другой стороны, расположенные продольные стержни 5, 6 и 15 для жесткости конструкции стола (фиг.3) позволяют как автоматизировать перемещение хирургического стола 4, так и могут быть использованы для установки робототехнического хирургического устройства с возможностью перемещения вдоль стола 1.
Использование изобретения позволяет расширить функциональные возможности медицинского хирургического стола путем функционального насыщения его различными робототехническими устройствами.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Медицинский хирургический стол включает операционный стол, предназначенный для проведения хирургических операций, позиционно связанный с инструментальным столом, и расположен на жестком основании, в котором с нижней его части расположены две пары колес для перемещения операционного стола. Основание стола выполнено в виде конструкции, в углах которой расположены цилиндрические трубки, имеющие форму незамкнутой окружности. Верхние части - концы цилиндрических трубок зафиксированы посредством П-образного профиля жесткости, который ориентирован поперек операционного стола. Причем нижние части - концы цилиндрических трубок выполнены смещенными попарно в направлении друг друга и зафиксированы посредством вторых П-образных профилей жесткости, которые ориентированы вдоль операционного стола, при этом на противоположных П-образных профилях жесткости по краям расположены цилиндрические направляющие, которые также жестко закреплены на них. Технический результат, обеспечиваемый заявленным изобретением, заключается в расширении функциональных возможностей хирургического стола. 2 з.п. ф-лы, 3 ил.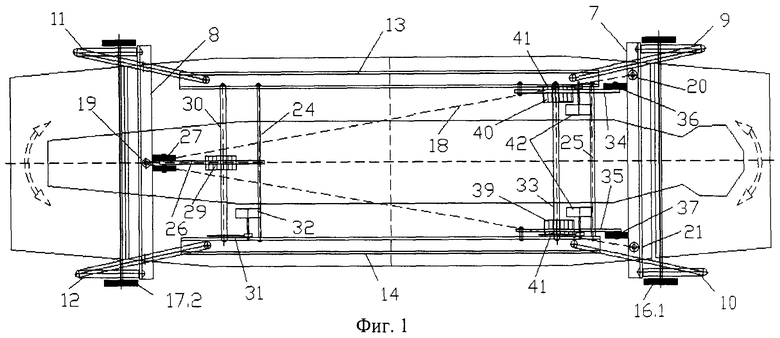
1. Медицинский хирургический стол робототехнической системы, включающий операционный стол, предназначенный для проведения хирургических операций, позиционно связан с инструментальным столом и расположен на жестком основании, в котором с нижней его части расположены две пары колес для перемещения операционного стола, отличающийся тем, что основание стола выполнено в виде конструкции, в углах которой расположены цилиндрические трубки, имеющие форму незамкнутой окружности, при этом верхние части - концы цилиндрических трубок зафиксированы посредством П-образного профиля жесткости, который ориентирован поперек операционного стола, а нижние ее части - концы выполнены смещенными попарно в направлении друг друга и зафиксированы посредством вторых П-образных профилей жесткости, которые ориентированы вдоль операционного стола, при этом на противоположных П-образных профилях жесткости по краям расположены цилиндрические направляющие, которые также жестко закреплены на них.
2. Медицинский хирургический стол по п.1, отличающийся тем, что операционный стол выполнен из нижней и верхней частей стола, которые соединены между собой фиксирующими элементами, при этом с нижней части стола расположены в углах треугольника три шарнирных элемента, выполненные с возможностью разворота, подвижная часть которых расположена в соосных отверстиях, которые выполнены в П-образных профилях, расположенных на меньшей стороне прямоугольной конструкции, при этом на П-образных профилях, расположенных на большей стороне конструкции на их противоположных концах расположены первый и второй цилиндрические стержни жесткости, на одном из которых в средней его части шарнирно расположен первый упор с одним или с двумя роликами, которые находится в направляющем пазу, который выполнен с нижней части стола и ориентирован вдоль его, при этом первый упор расположен на боковой плоскости многогранника со смещенной осью вращения, который жестко закреплен на первом цилиндрическом стержне, который связан посредством зубчатой передачи с первым шаговым двигателем для его разворота, а на другом цилиндрическом стержне жесткости по его краям расположены с возможностью разворота два дополнительных упора с роликами, которые также расположены в направляющих пазах с нижней части стола по краям стола и функционально связаны с боковой плоскостью двух других многогранников со смещенной осью вращения, которые шарнирно расположены на втором цилиндрическом стержне жесткости, при этом два других многогранника зубчатой передачей связаны с двумя другими шаговыми двигателями подъема и разворота стола.
3. Медицинский хирургический стол по п.1, отличающийся тем, что на верхней съемной части стола вдоль его расположена цилиндрическая направляющая, на которой расположена втулка инструментального стола с возможностью продольного перемещения вдоль направляющей и шарнирно связана с цилиндрической направляющей, закрепленной на П-образных профилях, которые расположены на меньшей стороне конструкции.
| СТОЛ ДЛЯ МАССАЖА И МАНУАЛЬНОЙ ТЕРАПИИ | 2005 |
|
RU2275894C1 |
| ОПЕРАЦИОННЫЙ СТОЛ | 2006 |
|
RU2338500C2 |
| US 6546577 В1, 15.04.2003 | |||
| US 6499156 В1, 31.12.2002. | |||

