Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура возвратно-поступательного продольного и вертикального перемещения с разворотным механизмом позиционного инструментального стола многофункционального диагностико-хирургического операционного стола с возможностью информационно-компьютерного управления (см. Патент UA Ю.И. Русанова (Вариант 3)), включающая вертикальный корпус стола с возможностью изменения высоты, который позиционно закреплен в его основании, при этом в верхней части вертикального корпуса, выполненного в виде цилиндра, соосно с ним расположен поворотный механизм, к которому закреплен ортогональный профиль с выступом в верхней его части и выступом с зубчатой поверхностью в средней его части, которые функционально связаны с подвижным устройством инструментального стола посредством разнесенных друг относительно друга двух подшипников и зубчатой шестеренки привода, корпус которого закреплен на подвижном устройстве, в нижней части которого также расположены разнесенные два дополнительных подшипника, контактирующие с боковой нижней частью ортогонального профиля, с другой стороны подвижного устройства закреплен дополнительный цилиндр, внутри которого расположен стержень с продольной зубчатой поверхностью на его поверхности, которая функционально связана с шестеренкой первого шагового двигателя с устройством, исключающим свободное его вращение, закрепленного на подвижном устройстве, при этом верхняя часть стержня с продольной зубчатой поверхностью зафиксирована в центральном отверстии корпуса инструментального стола в нижней его части для совместного возвратно-поступательного вертикального перемещения, а верхняя его часть расположена внутри корпуса инструментального стола и на ней расположена втулка с верхним пазом для фиксации с подвижной верхней частью инструментального стола, при этом в средней части втулки выполнена шестеренка увеличенного диаметра для функциональной связи с шестеренкой второго шагового двигателя разворота подвижной верхней части инструментального стола, который закреплен внутри корпуса инструментального стола (прототип).
Известный прототип имеет технологические возможности, которые заключаются в том, что инструментальный стол с корпусами хирургических и диагностических устройств, которые позиционно расположены по кругу, выполнен с возможностью возвратно-поступательного разворота и вертикального смещения.
Недостатком известной функциональной структуры фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой является функциональная незаконченность тороидальной хирургической робототехнической системы, поскольку вертикальный цилиндрический или многогранный корпус инструментального стола не реализован для ориентированного приема и удержания корпусов хирургических и диагностических устройств.
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая вертикальный цилиндрический или многогранный корпус инструментального стола с возможностью подъема и возвратно-поступательного разворота посредством привода с редуктором и шестеренки, а также включает фиксаторы удержания корпусов хирургических и диагностических устройств, которые позиционно расположены равномерно по кругу, при этом каждый корпус фиксаторов удержания корпусов хирургических и диагностических устройств конструктивно реализован цилиндрической формы и выполнен из двух ферромагнитных половин с возможностью совместного соединения, которые продольной своей частью закреплены по кругу на внешней стороне дополнительного вертикального цилиндра, который соосно расположен внутри вертикального цилиндрического или многогранного корпуса инструментального стола, а внутри двух ферромагнитных половин фиксаторов удержания корпусов хирургических и диагностических устройств соосно расположены соединенные между собой в средней части двух ферромагнитных половин два ферромагнитных стержня с общими витками катушки, при этом крайние части ферромагнитных половин фиксаторов удержания выполнены Г-образной формы и также реализованы из двух половин, противоположные концы которых выполнены с возможностью формирования электромагнитного поля, и противоположные концы двух ферромагнитных стержней также выполнены Г-образной формы, а противоположные концы их выполнены конической или сферической формы и расположены соосно в вертикально расположенных в первом и во втором отверстии вертикального цилиндрического или многогранного корпуса инструментального стола для ориентированного приема и удержания корпусов хирургических и диагностических устройств, при этом внутри и соосно инструментальному столу и дополнительного вертикального цилиндра по кругу расположены стержни, верхние концы которых закреплены в нижней части выдвижной крышки робототехнической системы, а нижние концы стержней зафиксированы на верхней части круглой пластины на краю верхней поверхности которой равномерно по кругу расположены опорные подшипники возвратно-поступательного разворота инструментального стола, которые посредством втулки функционально связаны с его нижней частью, а внутри в верхней части инструментального стола закреплена шестеренка, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором, которые зафиксированы в верхней части стержней для возвратно-поступательного разворота корпуса инструментального стола.
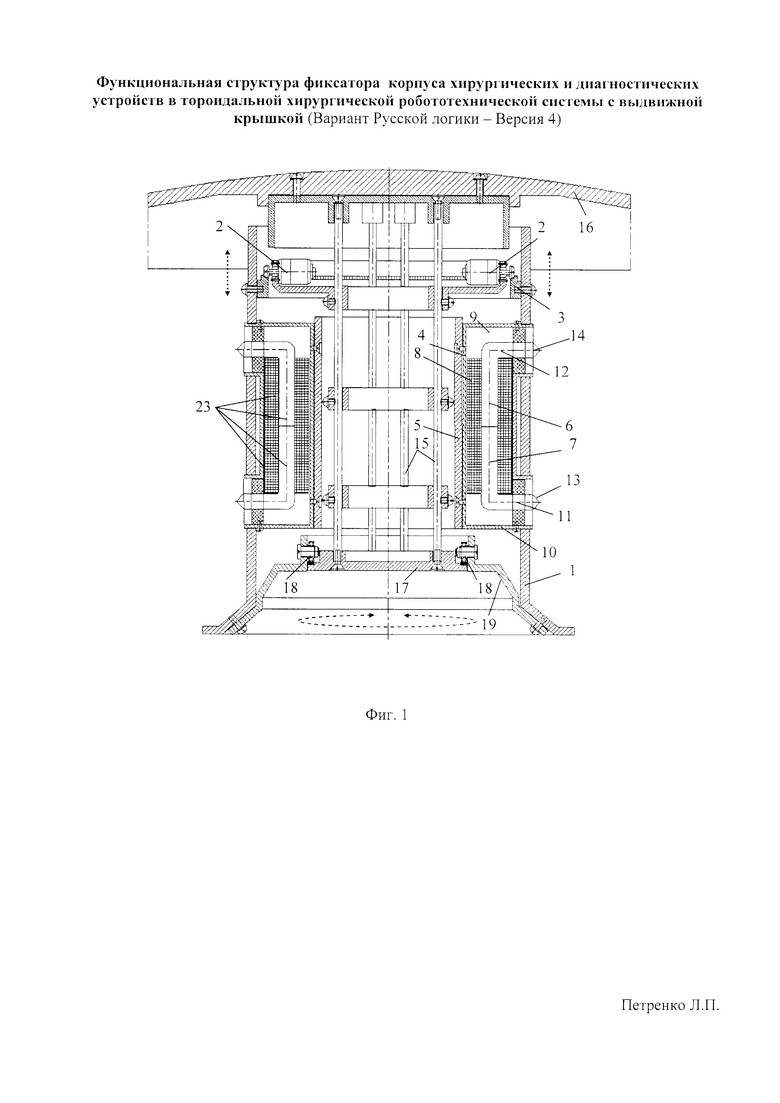
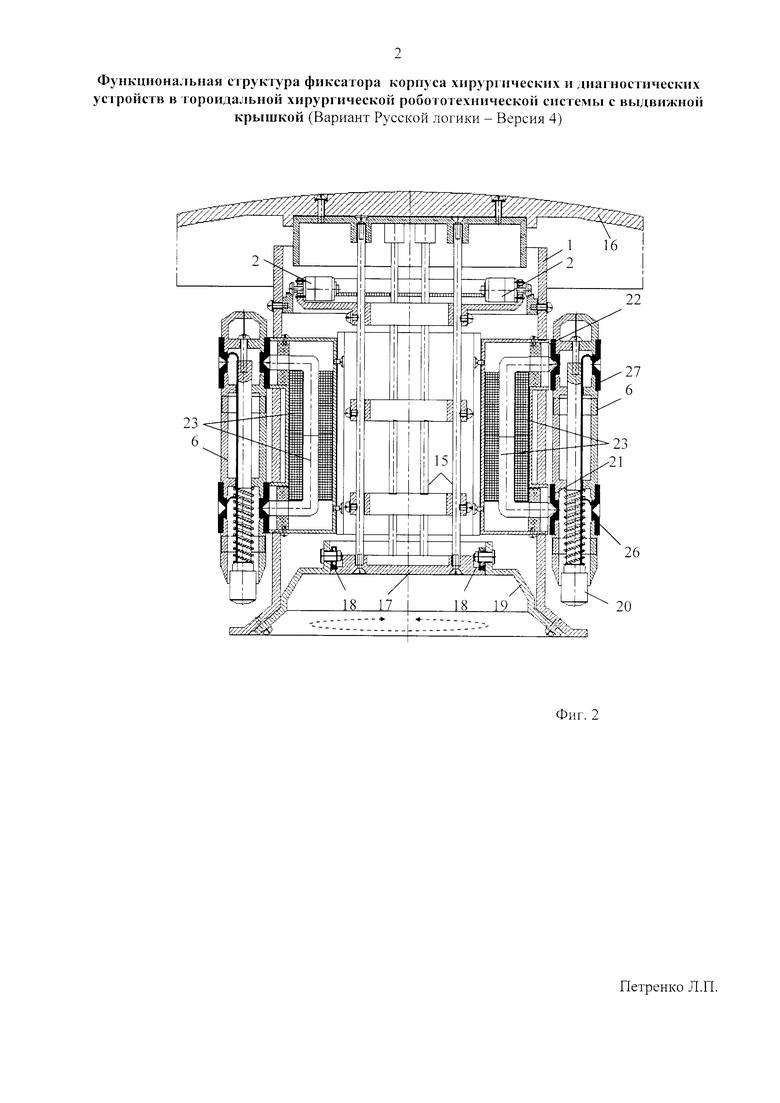
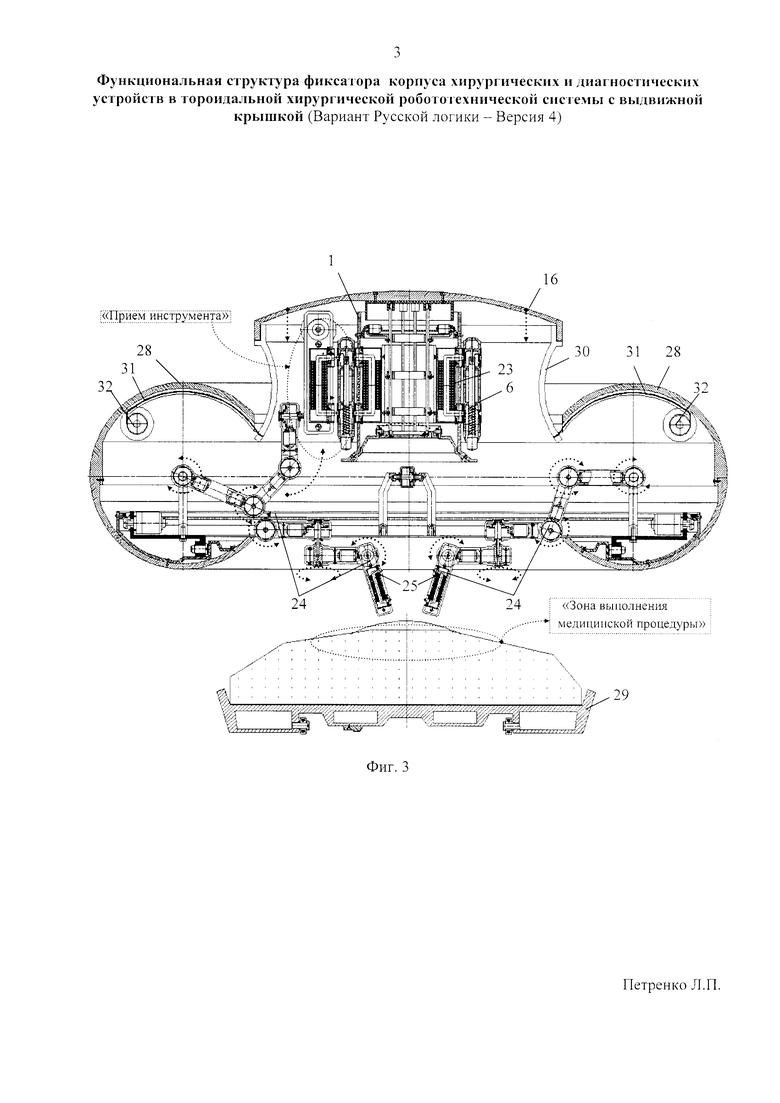
На фиг. 1 изображен цилиндрический или многогранный корпус инструментального стола с электромагнитными фиксаторами для удержания корпусов хирургических и диагностических устройств, при этом корпус инструментального стола выполнен с возможностью подъема и возвратно-поступательного разворота посредством привода с редуктором и шестеренки. На фиг. 2 изображен корпус инструментального стола с электромагнитными фиксаторами, которые удерживают корпусы хирургических и диагностических устройств. На фиг. 3 изображено позиционное положение тороидальной хирургической робототехнической системы с выдвижной крышкой с инструментальным столом и выдвижными элементами удержания корпусов хирургических и диагностических устройств в зоне «Прием инструмента» и позиционные выдвижные элементы удержания корпусов хирургических и диагностических устройств в «Зоне выполнения медицинской процедуры» над верхней частью подвижной части медицинского стола.
Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая вертикальный цилиндрический или многогранный корпус инструментального стола 1 с возможностью подъема и возвратно-поступательного разворота посредством привода с редуктором 2 и шестеренки 3, а также включает фиксаторы удержания корпусов хирургических и диагностических устройств, которые позиционно расположены равномерно по кругу, при этом каждый корпус фиксаторов удержания корпусов хирургических и диагностических устройств конструктивно реализован цилиндрической формы и выполнен из двух ферромагнитных половин 4 с возможностью совместного соединения, которые продольной своей частью закреплены по кругу на внешней стороне дополнительного вертикального цилиндра 5, который соосно расположен внутри вертикального цилиндрического или многогранного корпуса инструментального стола 1, а внутри двух ферромагнитных половин 4 фиксаторов удержания корпусов 6 хирургических и диагностических устройств соосно расположены соединенные между собой в средней части двух ферромагнитных половин 4 два ферромагнитных стержня 6 и 7 с общими витками катушки 8, при этом (фиг. 1) крайние части 9 и 10 ферромагнитных половин 4 фиксаторов удержания выполнены Г-образной формы и также реализованы из двух половин, противоположные концы которых выполнены с возможностью формирования электромагнитного поля, и противоположные концы двух ферромагнитных стержней 6 и 7 также выполнены Г-образной формы 11 и 12, а противоположные концы 13 и 14 их выполнены конической или сферической формы и расположены соосно в вертикально расположенных в первом и во втором отверстии вертикального цилиндрического или многогранного корпуса инструментального стола 1 для ориентированного приема и удержания корпусов 6 хирургических и диагностических устройств, при этом внутри и соосно инструментальному столу 1 и дополнительного вертикального цилиндра 5 по кругу расположены стержни 15, верхние концы которых закреплены в нижней части выдвижной крышки 16 робототехнической системы, а нижние концы стержней 15 зафиксированы на верхней части круглой пластины 17 на краю верхней поверхности которой равномерно по кругу расположены опорные подшипники 18 возвратно-поступательного разворота инструментального стола 1, которые посредством втулки 19 функционально связаны с его нижней частью, а внутри в верхней части инструментального стола 1 закреплена (фиг. 1) шестеренка 3, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором 2, которые зафиксированы в верхней части стержней 15 для возвратно-поступательного разворота корпуса инструментального стола 1. На фиг. 2 изображен инструментальный стол 1 с корпусами 6 хирургических и диагностических устройств 20, при этом в корпусах 6 с противоположных сторон зафиксированы смещенные друг относительно друга круглые пассивные ферромагнитные пластины 21 и 22 для удержания корпусов 6 в электромагнитном поле электромагнитов 23 до момента приема их (фиг. 3) выдвижными элементами удержания 24 с электромагнитами 25 корпусов 6 хирургических и диагностических устройств в зоне «Прием инструмента», и этот прием (фиг. 2) выполняют посредством вторых смещенных друг относительно друга круглых активных ферромагнитных пластин 26 и 27, с которых на хирургические и диагностические устройства 20 подают напряжение для их активизации. На фиг. 3 изображено позиционное положение корпуса 28 тороидальной хирургической робототехнической системы с выдвижными элементами 24 электромагнитного удержания корпусов 6 хирургических и диагностических устройств в зоне «Прием инструмента» и позиционное положение выдвижных элементов электромагнитного удержания корпусов 6 хирургических и диагностических устройств в «Зоне выполнения медицинской процедуры» над верхней частью подвижной части медицинского стола 29. При этом съемная верхняя часть выдвижной крышки 16 соосно расположена на выдвижной части 30 корпуса 28 тороидальной хирургической робототехнической системы, которая в нижней части соединена с первыми концами трех тросов 31, а вторые концы их зафиксированы на намоточном устройстве привода 32 подъема выдвижной крышки 16 совместно с инструментальным столом 1.
Реализация процедуры фиксации корпусов хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой заключается в следующем.
Перед выполнением медицинской процедуры (фиг. 3) перед подъемом выдвижной крышки 16 и 30 или после ее подъема верхнюю ее часть 16 снимают вместе с инструментальным столом 1 и в его электромагниты 23 (фиг. 2) по кругу вставляют корпусы 6 хирургических и диагностических устройств, после чего возвращают верхнюю ее часть выдвижной крышки 16 в исходное положение для выполнения различных медицинских процедур.
Использование предложенного технического решения позволяет расширить процедурные возможности тороидальной хирургической робототехнической системы с выдвижной крышкой.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, в которой каждый корпус фиксаторов удержания корпусов хирургических и диагностических устройств конструктивно реализован цилиндрической формы и выполнен из двух ферромагнитных половин с возможностью совместного соединения, которые продольной своей частью закреплены по кругу на внешней стороне дополнительного вертикального цилиндра, который соосно расположен внутри вертикального цилиндрического или многогранного корпуса инструментального стола, а внутри двух ферромагнитных половин фиксаторов удержания корпусов хирургических и диагностических устройств соосно расположены соединенные между собой в средней части двух ферромагнитных половин фиксаторов удержания корпусов хирургических и диагностических устройств два ферромагнитных стержня с общими витками катушки, при этом крайние части ферромагнитных половин фиксаторов удержания выполнены Г-образной формы и также реализованы из двух половин, противоположные концы которых выполнены с возможностью формирования электромагнитного поля, и противоположные концы двух ферромагнитных стержней также выполнены Г-образной формы, а противоположные концы их выполнены конической или сферической формы и расположены соосно в вертикально расположенных в первом и во втором отверстии вертикального цилиндрического или многогранного корпуса инструментального стола для ориентированного приема и удержания корпусов хирургических и диагностических устройств, при этом внутри и соосно инструментальному столу по кругу расположены стержни, верхние концы которых закреплены в нижней части выдвижной крышки робототехнической системы, а нижние концы стержней зафиксированы на верхней части круглой пластины, на краю верхней поверхности которой равномерно по кругу расположены опорные подшипники возвратно-поступательного разворота инструментального стола, которые посредством втулки функционально связаны с его нижней частью, а внутри в верхней части инструментального стола закреплена шестеренка, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором, которые зафиксированы в верхней части стержней для возвратно-поступательного разворота корпуса инструментального стола. 3 ил.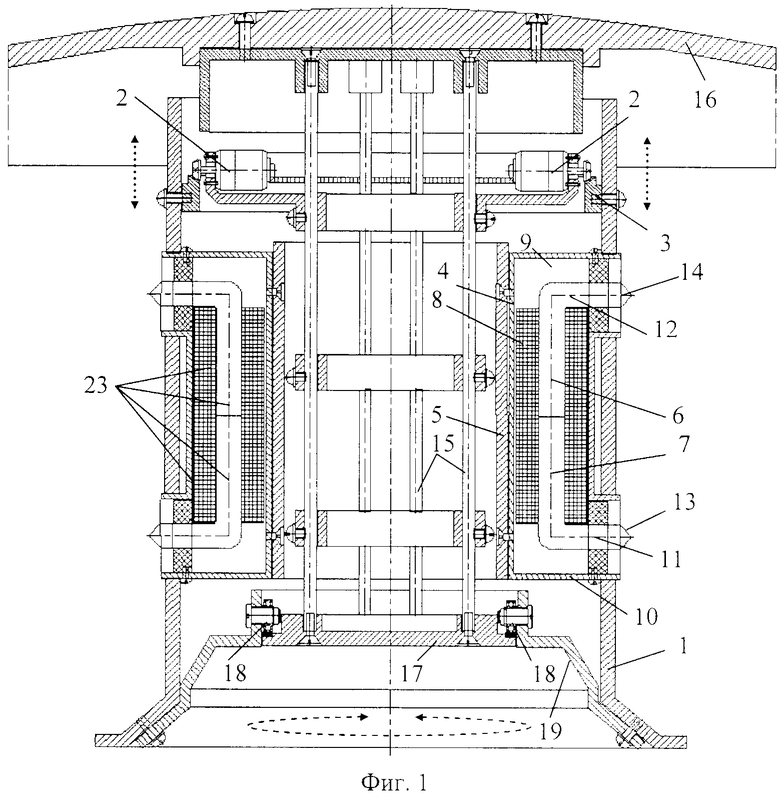
Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая вертикальный цилиндрический или многогранный корпус инструментального стола с возможностью подъема и возвратно-поступательного разворота посредством привода с редуктором и шестеренки, а также включает фиксаторы удержания корпусов хирургических и диагностических устройств, которые позиционно расположены равномерно по кругу, отличающаяся тем, что каждый корпус фиксаторов удержания корпусов хирургических и диагностических устройств конструктивно реализован цилиндрической формы и выполнен из двух ферромагнитных половин с возможностью совместного соединения, которые продольной своей частью закреплены по кругу на внешней стороне дополнительного вертикального цилиндра, который соосно расположен внутри вертикального цилиндрического или многогранного корпуса инструментального стола, а внутри двух ферромагнитных половин фиксаторов удержания корпусов хирургических и диагностических устройств соосно расположены соединенные между собой в средней части двух ферромагнитных половин два ферромагнитных стержня с общими витками катушки, при этом крайние части ферромагнитных половин фиксаторов удержания выполнены Г-образной формы и также реализованы из двух половин, противоположные концы которых выполнены с возможностью формирования электромагнитного поля, и противоположные концы двух ферромагнитных стержней также выполнены Г-образной формы, а противоположные концы их выполнены конической или сферической формы и расположены соосно в вертикально расположенных в первом и во втором отверстии вертикального цилиндрического или многогранного корпуса инструментального стола для ориентированного приема и удержания корпусов хирургических и диагностических устройств, при этом внутри и соосно инструментальному столу и дополнительного вертикального цилиндра по кругу расположены стержни, верхние концы которых закреплены в нижней части выдвижной крышки робототехнической системы, а нижние концы стержней зафиксированы на верхней части круглой пластины, на краю верхней поверхности которой равномерно по кругу расположены опорные подшипники возвратно-поступательного разворота инструментального стола, которые посредством втулки функционально связаны с его нижней частью, а внутри в верхней части инструментального стола закреплена шестеренка, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором, которые зафиксированы в верхней части стержней для возвратно-поступательного разворота корпуса инструментального стола.
| Метод распознавания окисляющих углеводороды бактерий при геомикробиологической разведке нефтяных и газовых месторождений | 1947 |
|
SU72498A1 |
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |
| US 4872657 A, 10.10.1989. | |||

