Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура возвратно-поступательного продольного и вертикального перемещения с разворотным механизмом позиционного инструментального стола многофункционального диагностико-хирургического операционного стола с возможностью информационно-компьютерного управления (см. патент UA Ю.И. Русанова (Вариант 3)), включающая вертикальный корпус стола с возможностью изменения высоты, который позиционно закреплен в его основании, при этом в верхней части вертикального корпуса, выполненного в виде цилиндра, соосно с ним расположен поворотный механизм, к которому закреплен ортогональный профиль с выступом в верхней его части и выступом с зубчатой поверхностью в средней его части, которые функционально связаны с подвижным устройством инструментального стола посредством разнесенных относительно друг друга двух подшипников и зубчатой шестеренки привода, корпус которого закреплен на подвижном устройстве, в нижней части которого также расположены разнесенные два дополнительных подшипника контактирующие с боковой нижней частью ортогонального профиля, с другой стороны подвижного устройства закреплен дополнительный цилиндр, внутри которого расположен стержень с продольной зубчатой поверхностью на его поверхности, которая функционально связана с шестеренкой первого шагового двигателя с устройством, исключающим свободное его вращение, закрепленного на подвижном устройстве, при этом верхняя часть стержня с продольной зубчатой поверхностью зафиксирована в центральном отверстии корпуса инструментального стола в нижней его части для совместного возвратно-поступательного вертикального перемещения, а верхняя его часть расположена внутри корпуса инструментального стола, и на ней расположена втулка с верхним пазом для фиксации с подвижной верхней частью инструментального стола, при этом в средней части втулки выполнена шестеренка увеличенного диаметра для функциональной связи с шестеренкой второго шагового двигателя разворота подвижной верхней части инструментального стола, который закреплен внутри корпуса инструментального стола (прототип).
Известный прототип имеет технологические возможности, которые заключаются в том, что инструментальный стол с корпусами хирургических и диагностический устройств, которые позиционно расположены по кругу, выполнен с возможностью возвратно-поступательного разворота и вертикального смещения.
Недостатком известной функциональной структуры фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой является функциональная незаконченность тороидальной хирургической робототехнической системы, поскольку вертикальный цилиндрический или многогранный корпус инструментального стола не реализован для ориентированного приема и удержания корпусов хирургических и диагностических устройств.
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой.
Указанный технический результат достигается следующей функциональной структурой. Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая цилиндрический или многогранный корпус инструментального стола с возможностью подъема и возвратно-поступательного вращения посредством привода с редуктором и шестеренки, также включает фиксаторы удержания корпусов хирургических и диагностических устройств, которые позиционно расположены по кругу, при этом фиксаторы удержания корпусов хирургических и диагностических устройств зафиксированы на внешней стороне цилиндрического или многогранного корпуса инструментального стола и выполнены в виде двух последовательно расположенных пластин П-образной формы с двумя упругими сторонами удержания корпусов хирургических и диагностических устройств, которые ориентированы вдоль инструментального стола, а с противоположных их сторон выполнены ограничительные пластины для ограничения смещения корпусов хирургических и диагностических устройств относительно верхней поверхности цилиндрического или многогранного корпуса инструментального стола, при этом внутри и соосно инструментальному столу по кругу расположены стержни, верхние концы которых закреплены в нижней части выдвижной крышки робототехнической системы, а нижние концы стержней зафиксированы на верхней части круглой пластины, на краю верхней поверхности которой расположены опорные подшипники возвратно-поступательного разворота инструментального стола, которые посредством втулки функционально связаны с нижней частью корпуса инструментального стола, а внутри в верхней части инструментального стола закреплена шестеренка, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором, которые зафиксированы в верхней части стержней для возвратно-поступательного разворота корпуса инструментального стола.
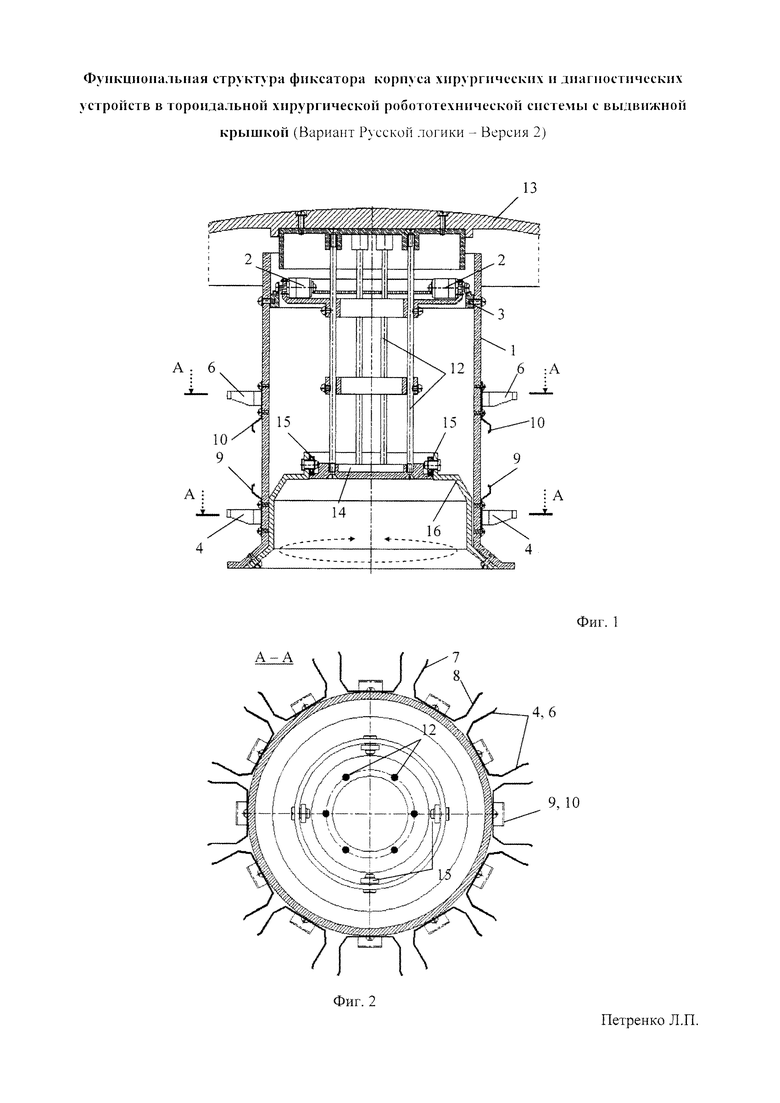
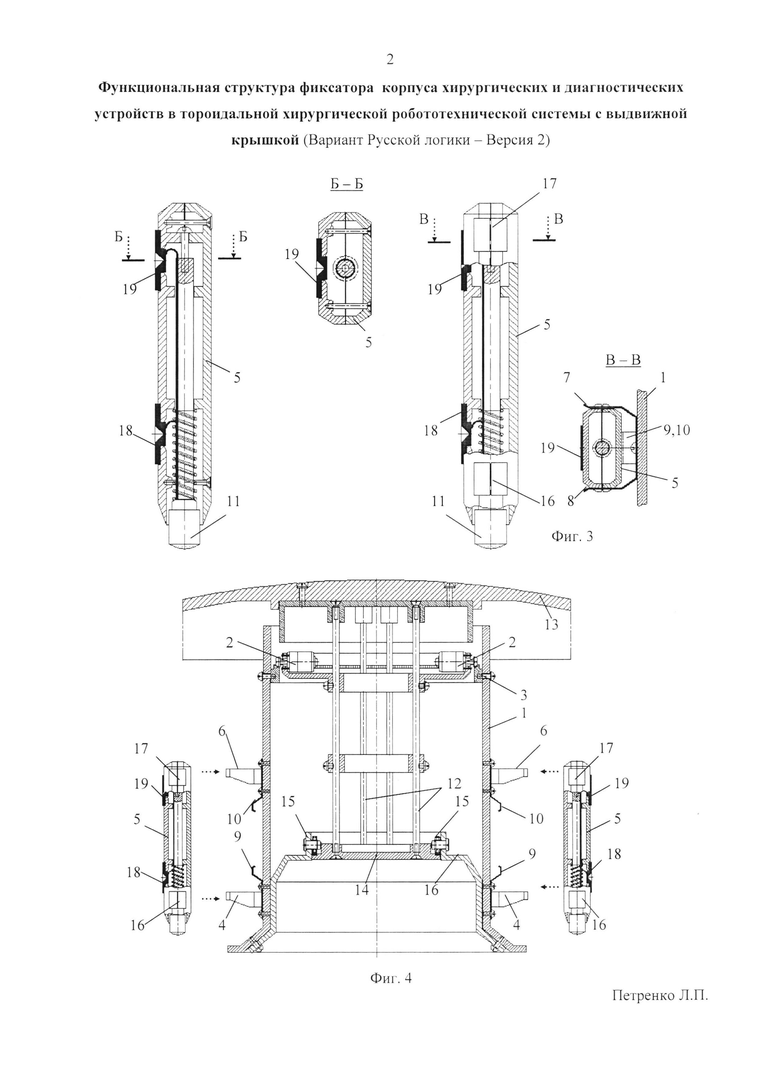
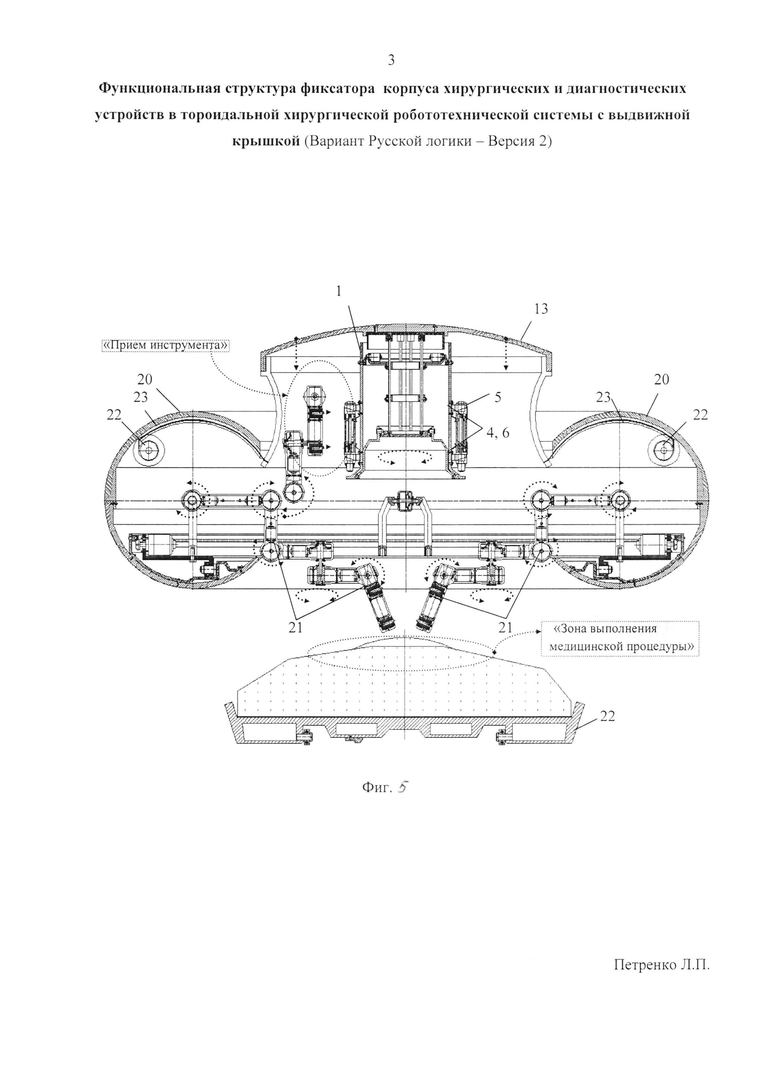
На фиг. 1 и 2 изображен цилиндрический или многогранный корпус инструментального стола с П-образными фиксаторами удержания корпусов с двумя упругими сторонами удержания корпусов хирургических и диагностических устройств, которые выполнены с возможностью подъема и возвратно-поступательного вращения посредством привода с редуктором и шестеренки. На фиг. 3 изображена конструкция корпуса хирургических и диагностических устройств с пазами в верхней и нижней его части для удержания его в пассивном фиксаторе на внешней поверхности инструментального стола. На фиг. 4 изображено позиционное положение корпусов хирургических и диагностических устройств, которые расположены напротив позиционного расположения пассивных фиксаторов их удержания. На фиг. 5 изображено позиционное положение тороидальной хирургической робототехнической системы с выдвижной крышкой с инструментальным столом и выдвижными элементами удержания корпусов хирургических и диагностических устройств в зоне «Прием инструмента» и позиционное положение выдвижных элементов удержания корпусов хирургических и диагностических устройств в «Зоне выполнения медицинской процедуры» над верхней частью подвижной части медицинского стола.
Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая цилиндрический или многогранный корпус инструментального стола 1 с возможностью подъема и возвратно-поступательного вращения посредством привода с редуктором 2 и шестеренки 3, также включает фиксаторы 4 удержания корпусов хирургических и диагностических устройств 5 (фиг. 3), которые позиционно расположены по кругу, при этом фиксаторы 4 удержания корпусов хирургических и диагностических устройств 5 зафиксированы на внешней стороне цилиндрического или многогранного корпуса инструментального стола 1 и выполнены в виде двух последовательно расположенных пластин П-образной формы 4 и 6 с двумя упругими сторонами 7 и 8 удержания корпусов хирургических и диагностических устройств, которые ориентированы вдоль инструментального стола 1, а с противоположных их сторон выполнены ограничительные пластины 9 и 10 для ограничения смещения корпусов 5 хирургических и диагностических устройств 11 относительно верхней поверхности цилиндрического или многогранного корпуса инструментального стола 1. При этом внутри и соосно инструментальному столу 1 по кругу расположены стержни 12, верхние концы которых закреплены в нижней части выдвижной крышки 13 робототехнической системы, а нижние концы стержней 12 зафиксированы на верхней части круглой пластины 14 на краю верхней поверхности которой расположены опорные подшипники 15 возвратно-поступательного разворота инструментального стола 1, которые посредством втулки 16 функционально связаны с нижней частью корпуса инструментального стола 1, а внутри в верхней части инструментального стола 1 закреплена шестеренка 3, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором 2, которые зафиксированы в верхней части стержней 12 для возвратно-поступательного разворота корпуса инструментального стола 1. На фиг. 3 изображена конструкция корпуса 5 хирургических и диагностических устройств 11 с двумя пазами 16 и 17, которые позиционно расположены с двух сторон корпусов 5 хирургических и диагностических устройств 11 в нижней и верхней их части для удержания их в пассивных фиксаторах 4 и 6 на внешней поверхности инструментального стола 1, при этом с одной стороны корпуса 5 хирургических и диагностических устройств ортогонально пазам 16 и 17 зафиксированы в одной плоскости две смещенные относительно друг друга электропроводящие круглые пластины 18 и 19 для подачи напряжения на хирургические и диагностические устройства 11. На фиг. 4 изображено позиционное положение корпусов 5 хирургических и диагностических устройств, которые расположены напротив позиционного расположения пассивных фиксаторов 4 и 6 их удержания. На фиг. 5 изображено позиционное положение тороидальной хирургической робототехнической системы с общим тороидальном корпусом 20 с выдвижной крышкой 13 с инструментальным столом 1 и выдвижными элементами 21 удержания корпусов 5 хирургических и диагностических устройств в зоне «Прием инструмента» и позиционное положение выдвижных элементов 21 удержания корпусов 5 хирургических и диагностических устройств в «Зоне выполнения медицинской процедуры» над верхней частью подвижной части медицинского стола 20. При этом внутри верхней части тороидального корпуса 20 для поднятия выдвижной крышки 13 в секторе 120° расположены три привода подъема 22 с тросами 23 ее подъема.
Реализация процедуры фиксации корпусов хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой заключается в следующем.
Перед выполнением медицинской процедуры фиг. 5 перед подъемом выдвижной крышки 13 или после ее подъема верхнюю ее часть снимают вместе с инструментальным столом 1 и (фиг. 4) в пассивные фиксаторы 4 и 6 вставляют по кругу корпуса 5 хирургических и диагностических устройств, после чего возвращают верхнюю часть выдвижной крышки 13 в исходное положение для выполнения медицинской процедуры.
Использование предложенного технического решения позволяет расширить процедурные возможности тороидальной хирургической робототехнической системы с выдвижной крышкой.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой включает цилиндрический или многогранный корпус инструментального стола 1 с возможностью подъема и возвратно-поступательного вращения посредством привода с редуктором и шестеренки, а также включает фиксаторы удержания корпусов хирургических и диагностических устройств, которые позиционно расположены по кругу. При этом фиксаторы удержания корпусов хирургических и диагностических устройств зафиксированы на внешней стороне цилиндрического или многогранного корпуса инструментального стола и выполнены в виде двух последовательно расположенных пластин П-образной формы с двумя упругими сторонами удержания корпусов хирургических и диагностических устройств, которые ориентированы вдоль инструментального стола, а с противоположных их сторон выполнены ограничительные пластины для ограничения смещения корпусов хирургических и диагностических устройств относительно верхней поверхности цилиндрического или многогранного корпуса инструментального стола, при этом внутри и соосно инструментальному столу по кругу расположены стержни, верхние концы которых закреплены в нижней части выдвижной крышки робототехнической системы, а нижние концы стержней зафиксированы на верхней части круглой пластины, на краю верхней поверхности которой расположены опорные подшипники возвратно-поступательного разворота инструментального стола, которые посредством втулки функционально связаны с нижней частью корпуса инструментального стола, а внутри в верхней части инструментального стола закреплена шестеренка, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором, которые зафиксированы в верхней части стержней для возвратно-поступательного разворота корпуса инструментального стола. 5 ил.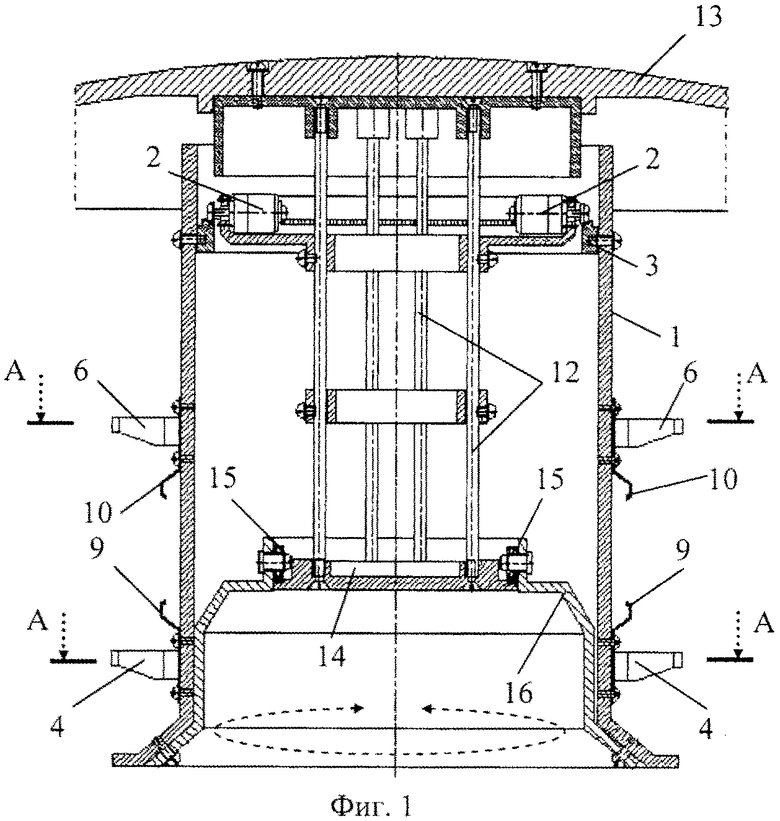
Функциональная структура фиксатора корпуса хирургических и диагностических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая цилиндрический или многогранный корпус инструментального стола с возможностью подъема и возвратно-поступательного вращения посредством привода с редуктором и шестеренки, а также включающая фиксаторы удержания корпусов хирургических и диагностических устройств, которые позиционно расположены по кругу, отличающаяся тем, что фиксаторы удержания корпусов хирургических и диагностических устройств зафиксированы на внешней стороне цилиндрического или многогранного корпуса инструментального стола и выполнены в виде двух последовательно расположенных пластин П-образной формы с двумя упругими сторонами удержания корпусов хирургических и диагностических устройств, которые ориентированы вдоль инструментального стола, а с противоположных их сторон выполнены ограничительные пластины для ограничения смещения корпусов хирургических и диагностических устройств относительно верхней поверхности цилиндрического или многогранного корпуса инструментального стола, при этом внутри и соосно инструментальному столу по кругу расположены стержни, верхние концы которых закреплены в нижней части выдвижной крышки робототехнической системы, а нижние концы стержней зафиксированы на верхней части круглой пластины, на краю верхней поверхности которой расположены опорные подшипники возвратно-поступательного разворота инструментального стола, которые посредством втулки функционально связаны с нижней частью корпуса инструментального стола, а внутри в верхней части инструментального стола закреплена шестеренка, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором, которые зафиксированы в верхней части стержней для возвратно-поступательного разворота корпуса инструментального стола.
| Способ борьбы с искажениями телеграфных сигналов | 1946 |
|
SU72485A1 |
| Способ получения альфа-оксиантрахинонсульфоновых кислот | 1947 |
|
SU72484A1 |
| US 4872657 A, 10.10.1989 | |||
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |

