Изобретение относится к подводному судостроению, а именно к подводным аппаратам (ПА), в частности к управляемым по кабелю связи самоходным ПА, предназначенным преимущественно для осмотра и подъема подводных объектов.
Известен рабочий телеуправляемый подводный аппарат «Пантера Плюс» (www.tetis-pro.ru), разработанный компанией Seaeye, и предназначен для выполнения широкого спектра подводно-технических работ, в том числе и без использования водолазов, при строительстве и обслуживании буровых и добывающих платформ, прокладке трубопроводов. Подводный аппарат может быть оборудован одновременно большим спектром дополнительных устройств, в том числе двумя различными гидравлическими манипуляторами, расположенными в носовой части аппарата.
К недостаткам указанного выше ПА следует отнести то, что он имеет ограниченные возможности при выполнении подводно-технических работ по подъему подводных объектов произвольной формы с габаритами примерно равными габаритам аппарата. Манипуляторы подводного аппарата не смогут взять такой объект и поднять его на судно-носитель, т.к. конструкция исполнительного устройства (манипуляторы) сосредоточена в носовой части аппарата.
Известен телеуправляемый подводный аппарат (ТПА) Super Mohawk производства Shilling Sub-Atlantic Alliance (www.sub-atlantic.co.uk). Подводный аппарат содержит корпус, различное навесное оборудование и два идентичных манипулятора, расположенных в носовой части аппарата.
Однако выполнение одной из функциональных задач данным подводным аппаратом затруднено, а именно проведение подводно-технических работ по подъему подводных объектов произвольной формы. Отсутствие в нем распределенного исполнительного устройства (манипулятора) для захвата объекта произвольной формы.
Задачей, на решение которой направлено заявленное техническое решение, является создание задающего устройства с системой силовой обратной связи и исполнительного устройства манипулятора с распределенным устройством захвата объекта, обеспечивающим надежное удержание объекта произвольной формы.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в повышении надежности захвата объекта произвольной формы, улучшении условий работы оператора, повышении качества обратной связи, обеспечивающей оператора информацией о силомоментных воздействиях в захватном устройстве, а также повышении быстродействия.
Поставленная задача решается тем, что подводный аппарат, содержащий корпус в форме параллелепипеда, с расположенным центром основания корпуса на основной плоскости и выделенным центром величины корпуса с явно выраженной метацентрической высотой, навесное оборудование, задающее устройство, манипуляционное устройство, которое содержит первый, второй, третий, четвертый однотипные исполнительные манипуляторы, каждый из которых содержит последовательно соединенных три звена с тремя плоскими шарнирами, с установленными в них первым, вторым, третьим приводами с первым, вторым, третьим датчиками измерения углового перемещения и первым, вторым, третьим датчиками измерения угловой скорости выходных звеньев, линия действия первого исполнительного манипулятора совпадает с плоскостью действия первого исполнительного манипулятора, проходящей через центр основания и центр величины корпуса, ось вращения первого шарнира перпендикулярна плоскости действия, первое звено первого шарнира соединено последовательно со вторым шарниром, ось вращения второго шарнира перпендикулярна плоскости действия, второе звено второго шарнира соединено последовательно с третьим шарниром, ось вращения третьего шарнира перпендикулярна плоскости действия, третье звено третьего шарнира соединено с захватом, второй, третий, четвертый исполнительные манипуляторы имеют аналогичные схемы относительно центров основания и величины корпуса аппарата, задающее устройство содержит неподвижное основание с расположенной в центре стойкой, на которой расположена подвижная платформа с установленными однотипными первым, вторым, третьим, четвертым задающими манипуляторами, каждый из которых содержит последовательно соединенных три звена с тремя плоскими шарнирами, с установленными в них первым, вторым, третьим приводами с первым, вторым, третьим датчиками измерения углового перемещения и первым, вторым, третьим датчиками измерения угловой скорости выходных звеньев, линия действия первого задающего манипулятора совпадает с плоскостью действия первого задающего манипулятора, проходящей через центр основной плоскости подвижной платформы, ось вращения первого шарнира перпендикулярна плоскости действия, первое звено первого шарнира соединено последовательно со вторым шарниром, ось вращения второго шарнира перпендикулярна плоскости действия, второе звено второго шарнира соединено последовательно с третьим шарниром, ось вращения третьего шарнира перпендикулярна плоскости действия, третье звено третьего шарнира соединено с захватом, второй, третий, четвертый задающие манипуляторы имеют аналогичные схемы относительно центра основной плоскости подвижной платформы, первый привод первого исполнительного манипулятора содержит последовательно соединенные первый сумматор, первый ограничитель скорости, второй сумматор, первый ограничитель тока, третий сумматор, первый усилитель, первый двигатель, связанный с первым датчиком измерения угловой скорости непосредственно и через первый редуктор с первым датчиком измерения углового перемещения, выход которого соединен с первым отрицательным входом первого сумматора, второй отрицательный вход второго сумматора соединен с выходом первого датчика измерения угловой скорости, второй отрицательный вход третьего сумматора соединен с выходом первого блока дифференцирования, вход которого соединен с выходом первого датчика измерения угловой скорости, второй, третий приводы первого исполнительного манипулятора имеют аналогичные схемы, в первом приводе первого задающего манипулятора последовательно соединенные четвертый сумматор, второй усилитель, второй двигатель, связанный с первым датчиком измерения угловой скорости непосредственно и через второй редуктор с первым датчиком измерения углового перемещения, выход которого соединен с первым входом первого сумматора первого привода первого исполнительного манипулятора, второй отрицательный вход четвертого сумматора соединен с выходом второго блока дифференцирования, вход которого соединен с выходом первого датчика измерения угловой скорости, второй, третий приводы первого задающего манипулятора имеют аналогичные схемы, первый двигатель содержит последовательно соединенные третий усилитель, вход которого соединен с выходом первого усилителя, четвертый усилитель, пятый сумматор, второй вход которого соединен с выходом первого порогового элемента, третий вход - с выходом пятого усилителя, четвертый вход - с выходом первого квадратора, вход которого соединен с выходом шестого усилителя, вход которого соединен с выходом первого датчика измерения угловой скорости, седьмой усилитель, первый интегратор, первый редуктор содержит последовательно соединенные второй интегратор, восьмой усилитель, выход первого блока дифференцирования соединен с входом девятого усилителя, выход которого соединен с входом второго ограничителя тока, выход которого соединен с четвертым сумматором, выход первого блока дифференцирования соединен с входом четырнадцатого усилителя, выход которого является первым выходом первого привода, выход первого датчика измерения угловой скорости соединен с входом пятнадцатого усилителя, выход которого является вторым выходом первого привода, выход первого датчика измерения углового перемещения является третьим выходом первого привода, вход пятого усилителя является первым входом первого привода, второй двигатель содержит последовательно соединенные десятый усилитель, вход которого соединен со вторым усилителем, одиннадцатый усилитель, шестой сумматор, второй вход которого соединен с выходом второго порогового элемента, двенадцатый усилитель, третий интегратор, второй редуктор содержит последовательно соединенные четвертый интегратор, тринадцатый усилитель, третий выход первого привода соединен с входом первого косинусного функционального преобразователя, выход которого соединен с первым входом первого блока умножения, второй вход которого соединен с выходом третьего порогового элемента, выход шестнадцатого блока умножения соединен со вторым входом седьмого сумматора, первый вход которого соединен с выходом второго блока умножения, первый вход которого соединен с выходом четвертого порогового элемента, второй вход соединен с выходом второго косинусного функционального преобразователя, вход которого соединен с выходом восьмого сумматора, первый вход которого соединен с третьим выходом первого привода, второй вход соединен с третьим выходом второго привода, выход седьмого сумматора соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом пятого порогового элемента, третий вход соединен с выходом шестого порогового элемента, выход третьего блока умножения соединен с первым входом девятого сумматора, второй вход которого соединен с выходом шестого порогового элемента, третий вход соединен с выходом четвертого блока умножения, первый вход которого соединен с выходом седьмого порогового элемента, второй вход соединен с выходом шестого порогового элемента, третий вход соединен с выходом десятого сумматора, первый вход которого соединен с выходом первого блока умножения, второй вход соединен с выходом пятого блока умножения, первый вход которого соединен с выходом восьмого порогового элемента, второй вход соединен с выходом третьего косинусного функционального преобразователя, вход которого соединен с выходом одиннадцатого сумматора, первый вход которого соединен с выходом восьмого сумматора, второй вход соединен с третьим выходом третьего привода, третий вход десятого сумматора соединен с выходом шестого блока умножения, первый вход которого соединен с выходом второго косинусного функционального преобразователя, второй вход соединен с выходом девятого порогового элемента, выход девятого сумматора соединен с первым входом двенадцатого сумматора, второй вход которого соединен с выходом седьмого блока умножения, первый вход которого соединен с выходом десятого порогового элемента, второй вход соединен с выходом шестого порогового элемента, третий вход соединен с выходом восьмого блока умножения, первый вход которого соединен с выходом одиннадцатого порогового элемента, второй вход соединен с выходом первого косинусного функционального преобразователя, выход четвертого блока умножения соединен с первым входом девятого блока умножения, второй вход которого соединен с выходом второго косинусного функционального преобразователя, выход девятого сумматора соединен с первым входом десятого блока умножения, первый вход которого соединен с выходом первого косинусного функционального преобразователя, третий выход второго привода соединен с входом четвертого косинусного функционального преобразователя, выход которого соединен с первым входом одиннадцатого блока умножения, второй вход которого соединен с выходом двенадцатого блока умножения, первый вход которого соединен с выходом девятого порогового элемента, второй вход соединен с выходом третьего порогового элемента, выход одиннадцатого блока умножения соединен с первым входом тринадцатого блока умножения, второй вход которого соединен с выходом двенадцатого порогового элемента, а выход соединен с первым входом тринадцатого сумматора, второй вход которого соединен с выходом второго квадратора, вход которого соединен с выходом третьего порогового элемента, третий вход тринадцатого сумматора соединен с выходом четырнадцатого сумматора, первый вход которого соединен с выходом третьего квадратора, вход которого соединен с выходом восьмого порогового элемента, второй и третий входы четырнадцатого сумматора соединены с выходом четырнадцатого блока умножения, первый вход которого соединен с выходом пятого косинусного функционального преобразователя, вход которого соединен с третьим выходом третьего привода, второй вход четырнадцатого блока умножения соединен с выходом пятнадцатого блока умножения, первый вход которого соединен с выходом восьмого порогового элемента, второй вход соединен с выходом девятого порогового элемента, четвертый вход четырнадцатого сумматора соединен с выходом четвертого квадратора, вход которого соединен с выходом девятого порогового элемента, четвертый вход тринадцатого сумматора соединен с выходом шестнадцатого блока умножения, первый вход которого соединен с выходом двенадцатого порогового элемента, второй вход соединен с выходом семнадцатого блока умножения, первый вход которого соединен с выходом восемнадцатого блока умножения, первый вход которого соединен с выходом восьмого порогового элемента, второй вход соединен с выходом третьего порогового элемента, второй вход семнадцатого блока умножения соединен с выходом шестого косинусного функционального преобразователя, вход которого соединен с выходом пятнадцатого сумматора, первый вход которого соединен с третьим выходом третьего привода, второй вход соединен с третьим выходом второго привода, выход тринадцатого сумматора соединен с первым входом девятнадцатого блока умножения, второй вход которого соединен с первым выходом первого привода, а выход девятнадцатого блока умножения соединен с первым входом шестнадцатого сумматора, второй вход которого соединен с выходом двадцатого блока умножения, первый вход которого соединен с первым выходом третьего привода, второй вход соединен с выходом семнадцатого сумматора, первый вход которого соединен с выходом третьего квадратора, второй вход соединен с выходом четырнадцатого блока умножения, третий вход - с выходом семнадцатого блока умножения, третий вход шестнадцатого сумматора соединен с выходом двадцать первого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом восемнадцатого сумматора, первый вход которого соединен с выходом четвертого квадратора, второй вход соединен с выходом четырнадцатого блока умножения, третий вход - с выходом семнадцатого сумматора, четвертый вход - с выходом одиннадцатого блока умножения, выход шестнадцатого сумматора соединен с первым входом двадцать второго блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, выход двадцать второго блока умножения соединен с первым входом девятнадцатого сумматора, второй вход которого соединен с выходом двадцать третьего блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход - с выходом пятого квадратора, вход которого соединен с выходом одиннадцатого порогового элемента, третий вход двадцать третьего блока умножения соединен с выходом десятого порогового элемента, третий вход девятнадцатого сумматора соединен с выходом двадцатого сумматора, первый вход которого соединен с выходом двадцать четвертого блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход соединен с выходом тринадцатого порогового элемента, второй вход двадцатого сумматора соединен с выходом двадцать первого сумматора, первый вход которого соединен с выходом двадцать пятого блока умножения, первый вход которого соединен с выходом четырнадцатого порогового элемента, второй вход соединен с выходом двадцать второго сумматора, первый вход которого соединен с первым выходом второго привода, второй вход соединен с первым выходом первого привода, второй вход двадцать первого сумматора соединен с выходом двадцать шестого блока умножения, первый вход которого соединен с выходом пятнадцатого порогового элемента, второй вход соединен с выходом двадцать третьего сумматора, первый вход которого соединен с выходом двадцать второго сумматора, второй вход соединен с первым выходом третьего привода, четвертый вход девятнадцатого сумматора соединен с выходом двадцать седьмого блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом двадцать четвертого сумматора, первый вход которого соединен с выходом двадцать восьмого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом тридцатого сумматора, первый вход которого соединен с выходом двадцать девятого блока умножения, первый вход которого соединен с выходом четвертого косинусного функционального преобразователя, второй вход соединен с выходом тридцатого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, второй вход соединен с выходом четвертого порогового элемента, второй вход двадцать четвертого сумматора соединен с выходом тридцать первого блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход соединен с выходом двадцать пятого сумматора, первый вход которого соединен с выходом второго квадратора, второй вход соединен с выходом тридцать второго блока умножения, первый вход которого соединен с выходом двенадцатого порогового элемента, второй вход соединен с выходом двадцать девятого блока умножения, третий вход двадцать пятого сумматора соединен с выходом шестого квадратора, вход которого соединен с выходом четвертого порогового элемента, выход третьего квадратора соединен с первым входом двадцать шестого сумматора, второй вход которого соединен с выходом четырнадцатого блока умножения, а выход соединен с первым входом тридцать третьего блока умножения, второй вход которого соединен с первым выходом третьего привода, а выход соединен с первым входом двадцать седьмого сумматора, второй вход которого соединен с выходом тридцать четвертого блока умножения, первый вход которого соединен с выходом восемнадцатого сумматора, второй вход соединен с первым выходом первого привода, третий вход двадцать седьмого сумматора соединен с выходом тридцать пятого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом четырнадцатого сумматора, выход двадцать седьмого сумматора соединен с первым входом тридцать шестого блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход соединен с первым входом двадцать восьмого сумматора, второй вход которого соединен с выходом двадцать первого сумматора, третий вход соединен с выходом тридцать седьмого блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом двадцать девятого сумматора, первый вход которого соединен с выходом тридцать восьмого блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход соединен с выходом тридцатого сумматора, второй вход которого соединен с выходом шестого квадратора, второй вход двадцать девятого сумматора соединен с выходом тридцать девятого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом шестого квадратора, выход двадцать шестого сумматора соединен с первым входом сорокового блока умножения, второй вход которого соединен с первым выходом второго привода, а выход соединен с первым входом тридцать первого сумматора, второй вход которого соединен с выходом сорок первого блока умножения, первый вход которого соединен с выходом третьего квадратора, второй вход соединен с первым выходом третьего привода, третий вход тридцать первого сумматора соединен с выходом сорок второго блока умножения, первый вход которого соединен с выходом семнадцатого сумматора, второй вход соединен с первым выходом первого привода, выход тридцать первого сумматора соединен с первым входом сорок третьего блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход соединен с первым входом тридцать второго сумматора, второй вход которого соединен с выходом двадцать шестого блока умножения, третий выход второго привода соединен с входом первого синусного функционального преобразователя, выход которого соединен с первым входом сорок четвертого блока умножения, второй вход которого соединен с выходом двенадцатого блока умножения, а выход соединен с первым входом тридцать третьего сумматора, второй вход которого соединен с выходом сорок пятого блока умножения, первый вход которого соединен с выходом восемнадцатого блока умножения, второй вход соединен с выходом второго синусного функционального преобразователя, вход которого соединен с выходом тридцать четвертого сумматора, первый вход которого соединен с третьим выходом второго привода, второй вход соединен с третьим выходом третьего привода, выход тридцать третьего сумматора соединен с первым и вторым входами тридцать пятого сумматора, выход которого соединен с первым входом сорок шестого блока умножения, второй вход которого соединен со вторым выходом первого привода, третий вход соединен со вторым выходом второго привода, выход сорок шестого блока умножения соединен с первым отрицательным входом тридцать шестого сумматора, второй отрицательный вход которого соединен с выходом сорок седьмого блока умножения, первый вход которого соединен со вторым выходом первого привода, второй вход соединен со вторым выходом третьего привода, третий вход - с выходом тридцать седьмого сумматора, первый вход которого соединен с выходом сорок пятого блока умножения, второй вход соединен с выходом тридцать восьмого сумматора, первый вход которого соединен с выходом сорок пятого блока умножения, второй вход соединен с выходом тридцать девятого сумматора, первый и второй выходы которого соединены с выходом сорок восьмого блока умножения, первый вход которого соединен с выходом пятнадцатого блока умножения, второй вход соединен с выходом третьего синусного функционального преобразователя, вход которого соединен с третьим выходом третьего привода, третий отрицательный вход тридцать шестого сумматора соединен с выходом сорок девятого блока умножения, первый вход которого соединен со вторым выходом третьего привода, второй вход соединен с выходом тридцать восьмого сумматора, третий вход - со вторым выходом второго привода, четвертый отрицательный вход тридцать шестого сумматора соединен с выходом пятидесятого блока умножения, первый и второй входы которого соединен со вторым выходом третьего привода, третий вход - с выходом сорокового сумматора, первый вход которого соединен с выходом сорок пятого блока умножения, второй вход - с выходом сорок восьмого блока умножения, пятый отрицательный вход тридцать шестого сумматора соединен с выходом пятьдесят первого блока умножения, первый вход которого соединен с выходом седьмого квадратора, выход которого соединен со вторым выходом второго привода, второй вход пятьдесят первого блока умножения соединен с выходом тридцать третьего сумматора, выход тридцать шестого сумматора соединен с первым входом пятьдесят второго блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход соединен с первым входом сорок первого сумматора, второй вход которого соединен с выходом пятьдесят третьего блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом сорок второго сумматора, первый отрицательный вход которого соединен с выходом пятьдесят четвертого блока умножения, первый вход которого соединен со вторым выходом второго привода, второй вход соединен со вторым выходом первого привода, третий вход - с выходом пятьдесят пятого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, второй вход соединен с выходом тридцатого блока умножения, второй отрицательный вход сорок второго сумматора соединен с выходом пятьдесят шестого блока умножения, первый вход которого соединен с выходом седьмого квадратора, второй вход соединен с выходом пятьдесят пятого блока умножения, второй вход третьего привода соединен с первым и вторым входами пятьдесят седьмого блока умножения, третий вход которого соединен с выходом сорок восьмого блока умножения, а выход соединен с первым отрицательным входом сорок третьего сумматора, второй отрицательный вход которого соединен с выходом пятьдесят восьмого блока умножения, первый вход которого соединен со вторым выходом третьего привода, второй вход соединен со вторым выходом первого привода, а третий вход - с выходом тридцать девятого сумматора, третий вход сорок третьего сумматора соединен с выходом пятьдесят девятого блока умножения, первый вход которого соединен с выходом тридцать третьего сумматора, второй вход соединен с выходом восьмого квадратора, вход которого соединен со вторым входом первого привода, четвертый отрицательный вход сорок третьего сумматора соединен с выходом шестидесятого блока умножения, первый вход которого соединен со вторым выходом второго привода, второй вход соединен с выходом тридцать девятого сумматора, третий вход соединен со вторым выходом третьего привода, выход сорок третьего сумматора соединен с первым входом шестьдесят первого блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход - с первым входом сорок четвертого сумматора, второй вход которого соединен с выходом шестьдесят второго блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом шестьдесят третьего блока умножения, первый вход которого соединен с выходом восьмого квадратора, второй вход соединен с выходом пятьдесят пятого блока умножения, второй выход первого привода соединен с первым входом шестьдесят четвертого блока умножения, второй вход которого соединен со вторым выходом второго привода, третий вход соединен с выходом тридцать девятого сумматора, а выход - с первым входом сорок пятого сумматора, второй вход которого соединен с выходом шестьдесят пятого блока умножения, первый вход которого соединен с выходом седьмого квадратора, второй вход соединен с выходом сорок восьмого блока умножения, третий вход сорок пятого сумматора соединен с выходом шестьдесят шестого блока умножения, первый вход которого соединен с выходом восьмого квадратора, второй вход соединен с выходом сорокового сумматора, выход сорок пятого сумматора соединен с первым входом шестьдесят седьмого блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, выход соединен с первым входом сорок шестого сумматора, второй вход которого соединен с выходом тридцать второго сумматора, третий вход соединен с выходом девятого блока умножения, а выход соединен с первым входом третьего привода, выход сорок четвертого сумматора соединен с первым входом сорок седьмого сумматора, второй вход которого соединен с выходом двадцать восьмого сумматора, третий вход соединен с выходом десятого блока умножения, а выход соединен с первым входом второго привода, выход сорок первого сумматора соединен с первым входом сорок восьмого сумматора, второй вход которого соединен с выходом девятнадцатого сумматора, третий вход соединен с выходом двенадцатого сумматора, а выход соединен с первым входом первого привода.
Сопоставительный анализ заявляемого технического решения с его аналогами и прототипом свидетельствует о его соответствии критерию "новизна".
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет добиться повышения надежности захвата объекта произвольной формы, улучшения условий работы оператора, повышения качества обратной связи, обеспечивающей оператора информацией о силомоментных воздействиях в захватном устройстве, а также повышения быстродействия.
Схема подводного аппарата в исходном состоянии представлена на фиг.1. На фиг.2 представлена схема задающего устройства в исходном состоянии. На фиг.3 представлена схема подводного аппарата в транспортном состоянии. На фиг.4 представлена схема задающего устройства в транспортном состоянии. На фиг.5 представлена кинематическая схема манипулятора. На фиг.6 представлена блок-схема для управления приводами исполнительного и задающего манипуляторов.
Подводный аппарат содержит корпус 1 в форме параллелепипеда, с расположенным центром 2 основания корпуса на основной плоскости 3 и выделенным центром 4 величины корпуса с явно выраженной метацентрической высотой 5, навесное оборудование 6, задающее устройство 7, манипуляционное устройство 8. Которое содержит первый, второй, третий, четвертый однотипные исполнительные манипуляторы 9. Каждый из которых содержит последовательно соединенных три звена с тремя плоскими шарнирами, с установленными в них первым 13, вторым 14, третьим 15 приводами с первым 16, вторым 17, третьим 18 датчиками измерения углового перемещения и первым 19, вторым 20, третьим 21 датчиками измерения угловой скорости выходных звеньев.
Линия 22 действия первого исполнительного манипулятора 9 совпадает с плоскостью 23 действия первого исполнительного манипулятора 9, проходящей через центр 2 основания и центр 4 величины корпуса 1. Ось 24 вращения первого шарнира 10 перпендикулярна плоскости 23 действия. Первое звено 25 первого шарнира 10 соединено последовательно со вторым шарниром 11. Ось вращения 26 второго шарнира 11 перпендикулярна плоскости действия 23. Второе звено 27 второго шарнира 11 соединено последовательно с третьим шарниром 12. Ось вращения 28 третьего шарнира 12 перпендикулярна плоскости 23 действия. Третье звено 29 третьего шарнира 12 соединено с захватом 30. Второй, третий, четвертый исполнительные манипуляторы 9 имеют аналогичные схемы относительно центров 2 основания и 4 величины корпуса 1 аппарата.
Задающее устройство 7 содержит неподвижное основание 31 с расположенной в центре стойкой 32, на которой расположена подвижная платформа 33 с установленными однотипными первым, вторым, третьим, четвертым задающими манипуляторами 34. Каждый из которых содержит последовательно соединенные три звена с тремя плоскими шарнирами, с установленными в них первым 38, вторым 39, третьим 40 приводами с первым 41, вторым 42, третьим 43 датчиками измерения углового перемещения и первым 44, вторым 45, третьим 46 датчиками измерения угловой скорости выходных звеньев. Линия 47 действия первого задающего манипулятора 34 совпадает с плоскостью действия 48 первого задающего манипулятора 34, проходящей через центр 49 основной плоскости подвижной платформы 33. Ось 50 вращения первого шарнира 35 перпендикулярна плоскости действия 48. Первое звено 51 первого шарнира 35 соединено последовательно со вторым шарниром 36. Ось 52 вращения второго шарнира 36 перпендикулярна плоскости 47 действия. Второе звено 53 второго шарнира 36 соединено последовательно с третьим шарниром 37. Ось 54 вращения третьего шарнира 37 перпендикулярна плоскости 47 действия. Третье звено 55 третьего шарнира 37 соединено с захватом 56. Второй, третий, четвертый задающие манипуляторы 34 имеют аналогичные схемы относительно центра 48 основной плоскости подвижной платформы 33.
Первый привод 13 первого исполнительного манипулятора 9 содержит последовательно соединенные первый сумматор 57, первый ограничитель 58 скорости, второй сумматор 59, первый ограничитель 60 тока, третий сумматор 61, первый усилитель 62, первый двигатель 63, связанный с первым датчиком 19 измерения угловой скорости непосредственно и через первый редуктор 64 с первым датчиком 16 измерения углового перемещения, выход которого соединен с первым отрицательным входом первого сумматора 57. Второй отрицательный вход второго сумматора 59 соединен с выходом первого датчика 19 измерения угловой скорости, второй отрицательный вход третьего сумматора 61 соединен с выходом первого блока 65 дифференцирования, вход которого соединен с выходом первого датчика 19 измерения угловой скорости. Второй 14, третий 15 приводы первого исполнительного манипулятора 9 имеют аналогичные схемы.
В первом приводе 38 первого задающего манипулятора 34 последовательно соединенные четвертый сумматор 66, второй усилитель 67, второй двигатель 68, связанный с первым датчиком 44 измерения угловой скорости непосредственно и через второй редуктор 69 с первым датчиком 41 измерения углового перемещения, выход которого соединен с первым входом первого сумматора 57 первого привода 13 первого исполнительного манипулятора 9. Второй отрицательный вход четвертого сумматора 66 соединен с выходом второго блока 70 дифференцирования, вход которого соединен с выходом первого датчика 44 измерения угловой скорости. Второй 39, третий 40 приводы первого задающего манипулятора 34 имеют аналогичные схемы.
Первый двигатель 63 содержит последовательно соединенные третий усилитель 71, вход которого соединен с выходом первого усилителя 62, четвертый усилитель 72, пятый сумматор 73, второй вход которого соединен с выходом первого порогового элемента 74, третий вход - с выходом пятого усилителя 75, четвертый вход - с выходом первого квадратора 76, вход которого соединен с выходом шестого усилителя 77, вход которого соединен с выходом первого датчика 19 измерения угловой скорости, седьмой усилитель 78, первый интегратор 79. Первый редуктор 64 содержит последовательно соединенные второй интегратор 80, восьмой усилитель 81. Выход первого блока 65 дифференцирования соединен с входом девятого усилителя 82, выход которого соединен с входом второго ограничителя 83 тока, выход которого соединен с четвертым сумматором 66, выход первого блока 65 дифференцирования соединен с входом четырнадцатого усилителя 84, выход которого является первым выходом первого привода 13. Выход первого датчика 19 измерения угловой скорости соединен с входом пятнадцатого усилителя 85, выход которого является вторым выходом первого привода 13, выход первого датчика 16 измерения углового перемещения является третьим выходом первого привода 13, вход пятого усилителя 75 является первым входом первого привода 13. Второй двигатель 68 содержит последовательно соединенные десятый усилитель 86, вход которого соединен со вторым усилителем 67, одиннадцатый усилитель 87, шестой сумматор 88, второй вход которого соединен с выходом второго порогового элемента 89, двенадцатый усилитель 90, третий интегратор 91. Второй редуктор 69 содержит последовательно соединенные четвертый интегратор 92, тринадцатый усилитель 93.
Третий выход первого привода 13 соединен с входом первого косинусного функционального преобразователя 94, выход которого соединен с первым входом первого блока 95 умножения, второй вход которого соединен с выходом третьего порогового элемента 96. Выход блока 95 умножения соединен со вторым входом седьмого сумматора 97, первый вход которого соединен с выходом второго блока 98 умножения, первый вход которого соединен с выходом четвертого порогового элемента 99, второй вход соединен с выходом второго косинусного функционального преобразователя 100, вход которого соединен с выходом восьмого сумматора 101, первый вход которого соединен с третьим выходом первого привода 13, второй вход соединен с третьим выходом второго привода 14. Выход седьмого сумматора 97 соединен с первым входом третьего блока 102 умножения, второй вход которого соединен с выходом пятого порогового элемента 103, третий вход соединен с выходом шестого порогового элемента 104. Выход третьего блока 102 умножения соединен с первым входом девятого сумматора 105, второй вход которого соединен с выходом шестого порогового элемента 104, третий вход соединен с выходом четвертого блока 106 умножения, первый вход которого соединен с выходом седьмого порогового элемента 107, второй вход соединен с выходом шестого порогового элемента 104, третий вход соединен с выходом десятого сумматора 108, первый вход которого соединен с выходом первого блока 95 умножения, второй вход соединен с выходом пятого блока 109 умножения, первый вход которого соединен с выходом восьмого порогового элемента 110, второй вход соединен с выходом третьего косинусного функционального преобразователя 111, вход которого соединен с выходом одиннадцатого сумматора 112, первый вход которого соединен с выходом восьмого сумматора 101, второй вход соединен с третьим выходом третьего привода 15. Третий вход десятого сумматора 108 соединен с выходом шестого блока 113 умножения, первый вход которого соединен с выходом второго косинусного функционального преобразователя 100, второй вход соединен с выходом девятого порогового элемента 114. Выход девятого сумматора 105 соединен с первым входом двенадцатого сумматора 115, второй вход которого соединен с выходом седьмого блока 116 умножения, первый вход которого соединен с выходом десятого порогового элемента 117, второй вход соединен с выходом шестого порогового элемента 104, третий вход соединен с выходом восьмого блока 118 умножения, первый вход которого соединен с выходом одиннадцатого порогового элемента 119, второй вход соединен с выходом первого косинусного функционального преобразователя 94. Выход четвертого блока 106 умножения соединен с первым входом девятого блока 120 умножения, второй вход которого соединен с выходом второго косинусного функционального преобразователя 100. Выход девятого сумматора 105 соединен с первым входом десятого блока 121 умножения, второй вход которого соединен с выходом первого косинусного функционального преобразователя 94.
Третий выход второго привода 14 соединен с входом четвертого косинусного функционального преобразователя 122, выход которого соединен с первым входом одиннадцатого блока 123 умножения, второй вход которого соединен с выходом двенадцатого блока 124 умножения, первый вход которого соединен с выходом девятого порогового элемента 114, второй вход соединен с выходом третьего порогового элемента 96. Выход одиннадцатого блока 123 умножения соединен с первым входом тринадцатого блока 125 умножения, второй вход которого соединен с выходом двенадцатого порогового элемента 126, а выход соединен с первым входом тринадцатого сумматора 127, второй вход которого соединен с выходом второго квадратора 128, вход которого соединен с выходом третьего порогового элемента 96. Третий вход тринадцатого сумматора 127 соединен с выходом четырнадцатого сумматора 129, первый вход которого соединен с выходом третьего квадратора 130, вход которого соединен с выходом восьмого порогового элемента 110. Второй и третий входы четырнадцатого сумматора 129 соединены с выходом четырнадцатого блока 131 умножения, первый вход которого соединен с выходом пятого косинусного функционального преобразователя 132, вход которого соединен с третьим выходом третьего привода 15. Второй вход четырнадцатого блока 131 умножения соединен с выходом пятнадцатого блока 133 умножения, первый вход которого соединен с выходом восьмого порогового элемента 110, второй вход соединен с выходом девятого порогового элемента 114. Четвертый вход четырнадцатого сумматора 129 соединен с выходом четвертого квадратора 134, вход которого соединен с выходом девятого порогового элемента 114. Четвертый вход тринадцатого сумматора 127 соединен с выходом шестнадцатого блока 135 умножения, первый вход которого соединен с выходом двенадцатого порогового элемента 126, второй вход соединен с выходом семнадцатого блока 136 умножения, первый вход которого соединен с выходом восемнадцатого блока 137 умножения, первый вход которого соединен с выходом восьмого порогового элемента 110, второй вход соединен с выходом третьего порогового элемента 96. Второй вход семнадцатого блока 136 умножения соединен с выходом шестого косинусного функционального преобразователя 138, вход которого соединен с выходом пятнадцатого сумматора 139, первый вход которого соединен с третьим выходом третьего привода 15, второй вход соединен с третьим выходом второго привода 14. Выход тринадцатого сумматора 127 соединен с первым входом девятнадцатого блока 140 умножения, второй вход которого соединен с первым выходом первого привода 13, а выход девятнадцатого блока 140 умножения соединен с первым входом шестнадцатого сумматора 141, второй вход которого соединен с выходом двадцатого блока 142 умножения, первый вход которого соединен с первым выходом третьего привода 15, второй вход соединен с выходом семнадцатого сумматора 143, первый вход которого соединен с выходом третьего квадратора 130, второй вход соединен с выходом четырнадцатого блока 131 умножения, третий вход - с выходом семнадцатого блока 136 умножения. Третий вход шестнадцатого сумматора 141 соединен с выходом двадцать первого блока 144 умножения, первый вход которого соединен с первым выходом второго привода 14, второй вход соединен с выходом восемнадцатого сумматора 145, первый вход которого соединен с выходом четвертого квадратора 134, второй вход соединен с выходом четырнадцатого блока 131 умножения, третий вход - с выходом семнадцатого сумматора 143, четвертый вход - с выходом одиннадцатого блока 123 умножения. Выход шестнадцатого сумматора 141 соединен с первым входом двадцать второго блока 146 умножения, второй вход которого соединен с выходом седьмого порогового элемента 107. Выход двадцать второго блока 146 умножения соединен с первым входом девятнадцатого сумматора 147, второй вход которого соединен с выходом двадцать третьего блока 148 умножения, первый вход которого соединен с первым выходом первого привода 13, второй вход - с выходом пятого квадратора 149, вход которого соединен с выходом одиннадцатого порогового элемента 119. Третий вход двадцать третьего блока 148 умножения соединен с выходом десятого порогового элемента 117. Третий вход девятнадцатого сумматора 147 соединен с выходом двадцатого сумматора 150, первый вход которого соединен с выходом двадцать четвертого блока 151 умножения, первый вход которого соединен с первым выходом первого привода 13, второй вход соединен с выходом тринадцатого порогового элемента 152. Второй вход двадцатого сумматора 150 соединен с выходом двадцать первого сумматора 153, первый вход которого соединен с выходом двадцать пятого блока 154 умножения, первый вход которого соединен с выходом четырнадцатого порогового элемента 155, второй вход соединен с выходом двадцать второго сумматора 156, первый вход которого соединен с первым выходом второго привода 14, второй вход соединен с первым выходом первого привода 13. Второй вход двадцать первого сумматора 153 соединен с выходом двадцать шестого блока 157 умножения, первый вход которого соединен с выходом пятнадцатого порогового элемента 158, второй вход соединен с выходом двадцать третьего сумматора 159, первый вход которого соединен с выходом двадцать второго сумматора 156, второй вход соединен с первым выходом третьего привода 15. Четвертый вход девятнадцатого сумматора 147 соединен с выходом двадцать седьмого блока 160 умножения, первый вход которого соединен с выходом пятого порогового элемента 103, второй вход соединен с выходом двадцать четвертого сумматора 161, первый вход которого соединен с выходом двадцать восьмого блока 162 умножения, первый вход которого соединен с первым выходом второго привода 14, второй вход соединен с выходом тридцатого сумматора 163, первый вход которого соединен с выходом двадцать девятого блока 164 умножения, первый вход которого соединен с выходом четвертого косинусного функционального преобразователя 122, второй вход соединен с выходом тридцатого блока 165 умножения, первый вход которого соединен с выходом третьего порогового элемента 96, второй вход соединен с выходом четвертого порогового элемента 99. Второй вход двадцать четвертого сумматора 161 соединен с выходом тридцать первого блока 166 умножения, первый вход которого соединен с первым выходом первого привода 13, второй вход соединен с выходом двадцать пятого сумматора 167, первый вход которого соединен с выходом второго квадратора 128, второй вход соединен с выходом тридцать второго блока 168 умножения, первый вход которого соединен с выходом двенадцатого порогового элемента 126, второй вход соединен с выходом двадцать девятого блока 164 умножения. Третий вход двадцать пятого сумматора 167 соединен с выходом шестого квадратора 169, вход которого соединен с выходом четвертого порогового элемента 99. Выход третьего квадратора 130 соединен с первым входом двадцать шестого сумматора 170, второй вход которого соединен с выходом четырнадцатого блока 131 умножения, а выход соединен с первым входом тридцать третьего блока 171 умножения, второй вход которого соединен с первым выходом третьего привода 15, а выход соединен с первым входом двадцать седьмого сумматора 172, второй вход которого соединен с выходом тридцать четвертого блока 173 умножения, первый вход которого соединен с выходом восемнадцатого сумматора 145, второй вход соединен с первым выходом первого привода 13. Третий вход двадцать седьмого сумматора 172 соединен с выходом тридцать пятого блока 174 умножения, первый вход которого соединен с первым выходом второго привода 14, второй вход соединен с выходом четырнадцатого сумматора 129. Выход двадцать седьмого сумматора 172 соединен с первым входом тридцать шестого блока 175 умножения, второй вход которого соединен с выходом седьмого порогового элемента 107, а выход соединен с первым входом двадцать восьмого сумматора 176, второй вход которого соединен с выходом двадцать первого сумматора 153, третий вход соединен с выходом тридцать седьмого блока 177 умножения, первый вход которого соединен с выходом пятого порогового элемента 103, второй вход соединен с выходом двадцать девятого сумматора 178, первый вход которого соединен с выходом тридцать восьмого блока 179 умножения, первый вход которого соединен с первым выходом первого привода 13, второй вход соединен с выходом тридцатого сумматора 163, второй вход которого соединен с выходом шестого квадратора 169. Второй вход двадцать девятого сумматора 178 соединен с выходом тридцать девятого блока 180 умножения, первый вход которого соединен с первым выходом второго привода 14, второй вход соединен с выходом шестого квадратора 169. Выход двадцать шестого сумматора 170 соединен с первым входом сорокового блока 181 умножения, второй вход которого соединен с первым выходом второго привода 14, а выход соединен с первым входом тридцать первого сумматора 182, второй вход которого соединен с выходом сорок первого блока 183 умножения, первый вход которого соединен с выходом третьего квадратора 130, второй вход соединен с первым выходом третьего привода 15. Третий вход тридцать первого сумматора 182 соединен с выходом сорок второго блока 184 умножения, первый вход которого соединен с выходом семнадцатого сумматора 143, второй вход соединен с первым выходом первого привода 13. Выход тридцать первого сумматора 182 соединен с первым входом сорок третьего блока 185 умножения, второй вход которого соединен с выходом седьмого порогового элемента 107, а выход соединен с первым входом тридцать второго сумматора 186, второй вход которого соединен с выходом двадцать шестого блока 157 умножения.
Третий выход второго привода 14 соединен с входом первого синусного функционального преобразователя 187, выход которого соединен с первым входом сорок четвертого блока 188 умножения, второй вход которого соединен с выходом двенадцатого блока 124 умножения, а выход соединен с первым входом тридцать третьего сумматора 189, второй вход которого соединен с выходом сорок пятого блока 190 умножения, первый вход которого соединен с выходом восемнадцатого блока 137 умножения, второй вход соединен с выходом второго синусного функционального преобразователя 191, вход которого соединен с выходом тридцать четвертого сумматора 192, первый вход которого соединен с третьим выходом второго привода 14, второй вход соединен с третьим выходом третьего привода 15. Выход тридцать третьего сумматора 189 соединен с первым и вторым входами тридцать пятого сумматора 193, выход которого соединен с первым входом сорок шестого блока 194 умножения, второй вход которого соединен со вторым выходом первого привода 13, третий вход соединен со вторым выходом второго привода 14. Выход сорок шестого блока 194 умножения соединен с первым отрицательным входом тридцать шестого сумматора 195, второй отрицательным вход которого соединен с выходом сорок седьмого блока 196 умножения, первый вход которого соединен со вторым выходом первого привода 13, второй вход соединен со вторым выходом третьего привода 15, третий вход - с выходом тридцать седьмого сумматора 197, первый вход которого соединен с выходом сорок пятого блока 190 умножения, второй вход соединен с выходом тридцать восьмого сумматора 198, первый вход которого соединен с выходом сорок пятого блока 190 умножения, второй вход соединен с выходом тридцать девятого сумматора 199, первый и второй выходы которого соединены с выходом сорок восьмого блока 200 умножения, первый вход которого соединен с выходом пятнадцатого блока 133 умножения, второй вход соединен с выходом третьего синусного функционального преобразователя 201, вход которого соединен с третьим выходом третьего привода 15. Третий отрицательный вход тридцать шестого сумматора 195 соединен с выходом сорок девятого блока 202 умножения, первый вход которого соединен со вторым выходом третьего привода 15, второй вход соединен с выходом тридцать восьмого сумматора 198, третий вход - со вторым выходом второго привода 14. Четвертый отрицательный вход тридцать шестого сумматора 195 соединен с выходом пятидесятого блока 203 умножения, первый и второй входы которого соединены со вторым выходом третьего привода 15, третий вход - с выходом сорокового сумматора 204, первый вход которого соединен с выходом сорок пятого блока 190 умножения, второй вход - с выходом сорок восьмого блока 200 умножения. Пятый отрицательный вход тридцать шестого сумматора 195 соединен с выходом пятьдесят первого блока 205 умножения, первый вход которого соединен с выходом седьмого квадратора 206, выход которого соединен со вторым выходом второго привода 14. Второй вход пятьдесят первого блока умножения 205 соединен с выходом тридцать третьего сумматора 189. Выход тридцать шестого сумматора 195 соединен с первым входом пятьдесят второго блока 207 умножения, второй вход которого соединен с выходом седьмого порогового элемента 107, а выход соединен с первым входом сорок первого сумматора 208, второй вход которого соединен с выходом пятьдесят третьего блока 209 умножения, первый вход которого соединен с выходом пятого порогового элемента 103, второй вход соединен с выходом сорок второго сумматора 210, первый отрицательный вход которого соединен с выходом пятьдесят четвертого блока 211 умножения, первый вход которого соединен со вторым выходом второго привода 14, второй вход соединен со вторым выходом первого привода 13, третий вход - с выходом пятьдесят пятого блока 212 умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя 187, второй вход соединен с выходом тридцатого блока 165 умножения. Второй отрицательный вход сорок второго сумматора 210 соединен с выходом пятьдесят шестого блока 213 умножения, первый вход которого соединен с выходом седьмого квадратора 206, второй вход соединен с выходом пятьдесят пятого блока 212 умножения. Второй вход третьего привода 15 соединен с первым и вторым входами пятьдесят седьмого блока 214 умножения, третий вход которого соединен с выходом сорок восьмого блока 200 умножения, а выход соединен с первым отрицательным входом сорок третьего сумматора 215, второй отрицательный вход которого соединен с выходом пятьдесят восьмого блока 216 умножения, первый вход которого соединен со вторым выходом третьего привода 15, второй вход соединен со вторым выходом первого привода 13, а третий вход - с выходом тридцать девятого сумматора 199. Третий вход сорок третьего сумматора 215 соединен с выходом пятьдесят девятого блока 217 умножения, первый вход которого соединен с выходом тридцать третьего сумматора 189, второй вход соединен с выходом восьмого квадратора 218, вход которого соединен со вторым входом первого привода 13. Четвертый отрицательный вход сорок третьего сумматора 215 соединен с выходом шестидесятого блока 219 умножения, первый вход которого соединен со вторым выходом второго привода 14, второй вход соединен с выходом тридцать девятого сумматора 199, третий вход соединен со вторым выходом третьего привода 15. Выход сорок третьего сумматора 215 соединен с первым входом шестьдесят первого блока 220 умножения, второй вход которого соединен с выходом седьмого порогового элемента 107, а выход - с первым входом сорок четвертого сумматора 221, второй вход которого соединен с выходом шестьдесят второго блока 222 умножения, первый вход которого соединен с выходом пятого порогового элемента 103, второй вход соединен с выходом шестьдесят третьего блока 223 умножения, первый вход которого соединен с выходом восьмого квадратора 218, второй вход соединен с выходом пятьдесят пятого блока 212 умножения. Второй выход первого привода 13 соединен с первым входом шестьдесят четвертого блока 224 умножения, второй вход которого соединен со вторым выходом второго привода 14, третий вход соединен с выходом тридцать девятого сумматора 199, а выход - с первым входом сорок пятого сумматора 225, второй вход которого соединен с выходом шестьдесят пятого блока 226 умножения, первый вход которого соединен с выходом седьмого квадратора 206, второй вход соединен с выходом сорок восьмого блока 200 умножения. Третий вход сорок пятого сумматора 225 соединен с выходом шестьдесят шестого блока 227 умножения, первый вход которого соединен с выходом восьмого квадратора 218, второй вход соединен с выходом сорокового сумматора 204. Выход сорок пятого сумматора 225 соединен с первым входом шестьдесят седьмого блока 228 умножения, второй вход которого соединен с выходом седьмого порогового элемента 107, выход соединен с первым входом сорок шестого сумматора 229, второй вход которого соединен с выходом тридцать второго сумматора 186, третий вход соединен с выходом девятого блока 120 умножения, а выход соединен с первым входом третьего привода 15. Выход сорок четвертого сумматора 221 соединен с первым входом сорок седьмого сумматора 230, второй вход которого соединен с выходом двадцать восьмого сумматора 176, третий вход соединен с выходом десятого блока 121 умножения, а выход соединен с первым входом второго привода 14. Выход сорок первого сумматора 208 соединен с первым входом сорок восьмого сумматора 231, второй вход которого соединен с выходом девятнадцатого сумматора 147, третий вход соединен с выходом двенадцатого сумматора 115, а выход соединен с первым входом первого привода 13.
На указанных чертежах введены следующие обозначения: qlo - задающий сигнал человека-оператора для первого привода; q1, q2, q3 - обобщенные координаты трех степеней подвижности; m1, m2, m3 - массы соответствующих звеньев манипулятора; l1, l2, l3 - длины соответствующих звеньев; 

 - расстояния от осей вращения соответствующих звеньев до их центров масс;
- расстояния от осей вращения соответствующих звеньев до их центров масс; 

 - скорости изменения соответствующих обобщенных координат;
- скорости изменения соответствующих обобщенных координат; 

 - ускорения изменения соответствующих обобщенных координат; Ji - моменты инерции соответствующих звеньев манипулятора
- ускорения изменения соответствующих обобщенных координат; Ji - моменты инерции соответствующих звеньев манипулятора 
Подводный аппарат работает следующим образом. При помощи расположенного на корпусе 1 навесного оборудования 6 аппарат выводят на заданный горизонт и осуществляют поиск. С обнаружением затонувшего объекта производят наведение аппарата с манипуляционным устройством 8 на затонувший объект. При помощи задающего устройства 7, перемещая звенья шарниров задающих манипуляторов 34, подают управляющие воздействия в приводы шарниров исполнительных манипуляторов 9 манипуляционного устройства 8, что приводит к их вращению. Из походного состояния аппарат приводят в исходное состояние. Далее поступают управляющие воздействия с задающего устройства 7 на исполнительные манипуляторы 9, что приводит к захвату объекта. С помощью навесного оборудования 6 захваченный объект доставляется к месту назначения.
При смещении звеньев первого, второго и третьего в плоскости 48 действия первого задающего манипулятора 34 человеком-оператором происходит вращение одного, второго, третьего шарнира (или их сочетание), измерение положения которых осуществляется датчиками 41, 42, 43 измерения углового перемещения соответственно. Выходные сигналы этих датчиков являются задающими (входными) сигналами для первого 13, второго 14, третьего 15 приводов первого исполнительного манипулятора 9. Определение обобщенной координаты q1н, скорости  , ускорения
, ускорения  первого привода 13 происходят с помощью входящих в состав первого исполнительного манипулятора 9 элементов 16, 19, 145, 64, 144 соответственно. Обобщенное ускорение, скорость, координата являются первым, вторым, третьим выходными сигналами первого привода 13. Второй 14, третий 15 приводы имеют аналогичные выходные сигналы.
первого привода 13 происходят с помощью входящих в состав первого исполнительного манипулятора 9 элементов 16, 19, 145, 64, 144 соответственно. Обобщенное ускорение, скорость, координата являются первым, вторым, третьим выходными сигналами первого привода 13. Второй 14, третий 15 приводы имеют аналогичные выходные сигналы.
Третий выходной сигнал qlн первого привода 13 поступает в первый косинусный функциональный преобразовать 94, выходной сигнал cosqlн которого умножают на выходной сигнал l1, третьего порогового элемента 96 в первом блоке 95 умножения, и умножают на выходной сигнал  одиннадцатого порогового элемента 119 в восьмом блоке 118 умножения. Третий выходной сигнал q2н второго привода 14 суммируют с третьим выходным сигналом первого привода 13 в восьмом сумматоре 101, выходной сигнал (qlн+q2н) которого суммируют с третьим выходным сигналом q3н третьего привода 15 в одиннадцатом сумматоре 112. Выходной сигнал восьмого сумматора 101 поступает во второй косинусный функциональный преобразователь 100, выходной сигнал cos(qlн+q2н) которого умножают на выходной сигнал
одиннадцатого порогового элемента 119 в восьмом блоке 118 умножения. Третий выходной сигнал q2н второго привода 14 суммируют с третьим выходным сигналом первого привода 13 в восьмом сумматоре 101, выходной сигнал (qlн+q2н) которого суммируют с третьим выходным сигналом q3н третьего привода 15 в одиннадцатом сумматоре 112. Выходной сигнал восьмого сумматора 101 поступает во второй косинусный функциональный преобразователь 100, выходной сигнал cos(qlн+q2н) которого умножают на выходной сигнал  четвертого порогового элемента 99 во втором блоке 98 умножения, и умножают на выходной сигнал l2 девятого порогового элемента 114 в шестом блоке 113 умножения. Суммирование сигналов l1cosqlн,
четвертого порогового элемента 99 во втором блоке 98 умножения, и умножают на выходной сигнал l2 девятого порогового элемента 114 в шестом блоке 113 умножения. Суммирование сигналов l1cosqlн,  , являющихся выходными сигналами первого 95, второго 98 блоков умножения соответственно, производят в седьмом сумматоре 97, выходной сигнал
, являющихся выходными сигналами первого 95, второго 98 блоков умножения соответственно, производят в седьмом сумматоре 97, выходной сигнал  которого умножают на выходные сигналы m2 пятого 103, g шестого 104 пороговых элементов соответственно, в третьем блоке 102 умножения. Выходной сигнал
которого умножают на выходные сигналы m2 пятого 103, g шестого 104 пороговых элементов соответственно, в третьем блоке 102 умножения. Выходной сигнал  восьмого блока 118 умножения умножают на выходные сигналы шестого 104, m1 десятого 117 пороговых элементов в седьмом блоке 116 умножения. Выходной сигнал (qlн+q2н+q3н) одиннадцатого сумматора 112 поступает в третий косинусный функциональный преобразователь 111, выходной сигнал cos(qlн+q2н+q3н) которого умножают на выходной сигнал
восьмого блока 118 умножения умножают на выходные сигналы шестого 104, m1 десятого 117 пороговых элементов в седьмом блоке 116 умножения. Выходной сигнал (qlн+q2н+q3н) одиннадцатого сумматора 112 поступает в третий косинусный функциональный преобразователь 111, выходной сигнал cos(qlн+q2н+q3н) которого умножают на выходной сигнал  восьмого порогового элемента 110 в пятом блоке 109 умножения. Суммирование сигналов l1cosqlн, l2cos(qlн+q2н),
восьмого порогового элемента 110 в пятом блоке 109 умножения. Суммирование сигналов l1cosqlн, l2cos(qlн+q2н),  , являющихся выходными сигналами первого 95, пятого 109, шестого 113 блоков умножения соответственно, производят в десятом сумматоре 108, выходной сигнал
, являющихся выходными сигналами первого 95, пятого 109, шестого 113 блоков умножения соответственно, производят в десятом сумматоре 108, выходной сигнал  которого умножают на выходные сигналы шестого 104, m3 седьмого 107 пороговых элементов в четвертом блоке 106 умножения, выходной сигнал
которого умножают на выходные сигналы шестого 104, m3 седьмого 107 пороговых элементов в четвертом блоке 106 умножения, выходной сигнал  которого умножают на выходной сигнал второго косинусного функционального преобразователя 100 в девятом блоке 120 умножения, а также суммируют с выходным сигналом
которого умножают на выходной сигнал второго косинусного функционального преобразователя 100 в девятом блоке 120 умножения, а также суммируют с выходным сигналом  третьего блока 102 умножения в девятом сумматоре 105, выходной сигнал
третьего блока 102 умножения в девятом сумматоре 105, выходной сигнал  которого умножают на выходной сигнал первого косинусного функционального преобразователя 94 в десятом блоке 121 умножения, а также суммируют с выходным сигналом
которого умножают на выходной сигнал первого косинусного функционального преобразователя 94 в десятом блоке 121 умножения, а также суммируют с выходным сигналом  седьмого блока 116 умножения в двенадцатом сумматоре 115.
седьмого блока 116 умножения в двенадцатом сумматоре 115.
Умножение сигналов l1, l2, являющихся выходными сигналами третьего 96, девятого 114 пороговых элементов соответственно, производят в двенадцатом блоке 124 умножения. Умножение сигналов  являющихся выходными сигналами девятого 114, восьмого 110 пороговых элементов соответственно, производят в пятнадцатом блоке 133 умножения. Умножение сигналов
являющихся выходными сигналами девятого 114, восьмого 110 пороговых элементов соответственно, производят в пятнадцатом блоке 133 умножения. Умножение сигналов  являющихся выходными сигналами третьего 96, восьмого 110 пороговых элементов соответственно, производят в восемнадцатом блоке 137 умножения. Умножение сигналов
являющихся выходными сигналами третьего 96, восьмого 110 пороговых элементов соответственно, производят в восемнадцатом блоке 137 умножения. Умножение сигналов  являющихся выходными сигналами третьего 96, четвертого 99 пороговых элементов соответственно, производят в тридцатом блоке 165 умножения. Возведение в квадрат выходных сигналов третьего 96, четвертого 99, восьмого 110, девятого 114, одиннадцатого 119 пороговых элементов производят во втором 128, шестом 169, третьем 130, четвертом 134, пятом 149 квадраторах соответственно.
являющихся выходными сигналами третьего 96, четвертого 99 пороговых элементов соответственно, производят в тридцатом блоке 165 умножения. Возведение в квадрат выходных сигналов третьего 96, четвертого 99, восьмого 110, девятого 114, одиннадцатого 119 пороговых элементов производят во втором 128, шестом 169, третьем 130, четвертом 134, пятом 149 квадраторах соответственно.
Третий выходной сигнал второго привода 14 поступает в четвертый косинусный функциональный преобразователь 122, выходной сигнал cosq2н которого умножают на выходной сигнал l1·l2 двенадцатого блока 124 умножения в одиннадцатом блоке 123 умножения. Третий выходной сигнал третьего привода 15 поступает в пятый косинусный функциональный преобразователь 132, выходной сигнал cosq3н которого умножают на выходной сигнал  пятнадцатого блока 133 умножения в четырнадцатом блоке 131 умножения.
пятнадцатого блока 133 умножения в четырнадцатом блоке 131 умножения.
Суммирование сигналов q2н, q3н, являющихся третьими выходными сигналами второго 14, третьего 15 приводов соответственно, производят в пятнадцатом сумматоре 139, выходной сигнал (q2н+q3н) которого поступает в шестой косинусный функциональный преобразователь 138, выходной сигнал cos(q2н+q3н) которого умножают на выходной сигнал  восемнадцатого блока 137 умножения в семнадцатом блоке 136 умножения, выходной сигнал
восемнадцатого блока 137 умножения в семнадцатом блоке 136 умножения, выходной сигнал  которого суммируется с выходными сигналами
которого суммируется с выходными сигналами  третьего квадратора 130,
третьего квадратора 130,  четырнадцатого блока 131 умножения в семнадцатом сумматоре 143, выходной сигнал
четырнадцатого блока 131 умножения в семнадцатом сумматоре 143, выходной сигнал  которого суммируется с выходными сигналами l1·l2·cosq2н одиннадцатого блока 123 умножения,
которого суммируется с выходными сигналами l1·l2·cosq2н одиннадцатого блока 123 умножения,  четырнадцатого блока 131 умножения,
четырнадцатого блока 131 умножения,  четвертого квадратора 134 в восемнадцатом сумматоре 145, выходной сигнал
четвертого квадратора 134 в восемнадцатом сумматоре 145, выходной сигнал  которого умножают на первый выходной сигнал первого привода 13 в тридцать четвертом блоке 173 умножения, и умножают на первый выходной сигнал второго привода 14 в двадцать первом блоке 144 умножения.
которого умножают на первый выходной сигнал первого привода 13 в тридцать четвертом блоке 173 умножения, и умножают на первый выходной сигнал второго привода 14 в двадцать первом блоке 144 умножения.
Суммирование сигналов 

 являющихся выходными сигналами третьего квадратора 130, двух четырнадцатых блоков 131 умножения, четвертого квадратора 134 соответственно, производят в четырнадцатом сумматоре 129, выходной сигнал
являющихся выходными сигналами третьего квадратора 130, двух четырнадцатых блоков 131 умножения, четвертого квадратора 134 соответственно, производят в четырнадцатом сумматоре 129, выходной сигнал  которого умножают на первый выходной сигнал второго привода 14 в тридцать пятом блоке 174 умножения.
которого умножают на первый выходной сигнал второго привода 14 в тридцать пятом блоке 174 умножения.
Выходной сигнал одиннадцатого блока 123 умножения умножают на выходной сигнал (2) двенадцатого порогового элемента 126 в тринадцатом блоке 125 умножения. Выходной сигнал семнадцатого блока 136 умножения умножают на выходной сигнал двенадцатого порогового элемента 126 в шестнадцатом блоке 135 умножения, выходной сигнал  которого суммируется с выходными сигналами четырнадцатого сумматора 129,
которого суммируется с выходными сигналами четырнадцатого сумматора 129,  второго квадратора 128, тринадцатого блока 125 умножения в тринадцатом сумматоре 127, выходной сигнал
второго квадратора 128, тринадцатого блока 125 умножения в тринадцатом сумматоре 127, выходной сигнал  которого умножают на первый выходной сигнал первого привода 13 в девятнадцатом блоке 140 умножения.
которого умножают на первый выходной сигнал первого привода 13 в девятнадцатом блоке 140 умножения.
Выходной сигнал семнадцатого сумматора 143 умножают на первый выходной сигнал третьего привода 15 в двадцатом блоке 142 умножения, выходной сигнал  которого суммируют с выходными сигналами
которого суммируют с выходными сигналами

девятнадцатого блока 140 умножения,  двадцать первого блока 144 умножения в шестнадцатом сумматоре 141, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в двадцать втором блоке 146 умножения.
двадцать первого блока 144 умножения в шестнадцатом сумматоре 141, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в двадцать втором блоке 146 умножения.
Суммирование сигналов 
 являющихся выходными сигналами третьего квадратора 130, четырнадцатого блока 131 умножения соответственно, производят в двадцать шестом сумматоре 170, выходной сигнал
являющихся выходными сигналами третьего квадратора 130, четырнадцатого блока 131 умножения соответственно, производят в двадцать шестом сумматоре 170, выходной сигнал  которого умножают на первый выходной сигнал третьего привода 15 в тридцать третьем блоке 171 умножения, выходной сигнал
которого умножают на первый выходной сигнал третьего привода 15 в тридцать третьем блоке 171 умножения, выходной сигнал  которого суммируют с выходными сигналами
которого суммируют с выходными сигналами  тридцать пятого блока 174 умножения,
тридцать пятого блока 174 умножения,  тридцать четвертого блока 173 умножения в двадцать седьмом сумматоре 172, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в тридцать шестом блоке 175 умножения.
тридцать четвертого блока 173 умножения в двадцать седьмом сумматоре 172, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в тридцать шестом блоке 175 умножения.
Выходной сигнал двадцать шестого сумматора 170 умножают на первый выходной сигнал второго привода 14 в сороковом блоке 181 умножения. Выходной сигнал третьего квадратора 130 умножают на первый выходной сигнал третьего привода 15 в сорок первом блоке 183 умножения. Выходной сигнал семнадцатого сумматора 143 умножают на первый выходной сигнал первого привода 13 в сорок втором блоке 184 умножения, выходной сигнал  которого суммируют с выходными сигналами
которого суммируют с выходными сигналами  сорокового блока 181 умножения,
сорокового блока 181 умножения,  сорок первого блока 183 умножения в тридцать первом сумматоре 182, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в сорок третьем блоке 185 умножения.
сорок первого блока 183 умножения в тридцать первом сумматоре 182, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в сорок третьем блоке 185 умножения.
Выходной сигнал тридцатого блока 165 умножения умножают на выходной сигнал четвертого косинусного функционального преобразователя 122 в двадцать девятом блоке 164 умножения, выходной сигнал  которого умножают на выходной сигнал двенадцатого порогового элемента 126 в тридцать втором блоке 168 умножения, выходной сигнал
которого умножают на выходной сигнал двенадцатого порогового элемента 126 в тридцать втором блоке 168 умножения, выходной сигнал  которого суммируют с выходными сигналами второго 128, шестого 169 квадраторов в двадцать пятом сумматоре 167, выходной сигнал
которого суммируют с выходными сигналами второго 128, шестого 169 квадраторов в двадцать пятом сумматоре 167, выходной сигнал  которого умножают на первый выходной сигнал первого привода 13 в тридцать первом блоке 166 умножения. Выходной сигнал двадцать девятого блока 164 умножения суммируют с выходным сигналом шестого 169 квадратора в тридцатом сумматоре 163, выходной сигнал
которого умножают на первый выходной сигнал первого привода 13 в тридцать первом блоке 166 умножения. Выходной сигнал двадцать девятого блока 164 умножения суммируют с выходным сигналом шестого 169 квадратора в тридцатом сумматоре 163, выходной сигнал  которого умножают на первый выходной сигнал второго привода 14 в двадцать восьмом блоке 162 умножения, выходной сигнал
которого умножают на первый выходной сигнал второго привода 14 в двадцать восьмом блоке 162 умножения, выходной сигнал  которого суммируют с выходным сигналом тридцать первого блока 166 умножения в двадцать четвертом сумматоре 161. Выходной сигнал тридцатого сумматора 163 умножают на первый выходной сигнал первого привода 13 в тридцать восьмом блоке 179 умножения. Выходной сигнал шестого 169 квадратора умножают на первый выходной сигнал второго привода 14 в тридцать девятом блоке 180 умножения, выходной сигнал
которого суммируют с выходным сигналом тридцать первого блока 166 умножения в двадцать четвертом сумматоре 161. Выходной сигнал тридцатого сумматора 163 умножают на первый выходной сигнал первого привода 13 в тридцать восьмом блоке 179 умножения. Выходной сигнал шестого 169 квадратора умножают на первый выходной сигнал второго привода 14 в тридцать девятом блоке 180 умножения, выходной сигнал  которого суммируют с выходным сигналом
которого суммируют с выходным сигналом  тридцать восьмого блока 179 умножения в двадцать девятом сумматоре 178, выходной сигнал
тридцать восьмого блока 179 умножения в двадцать девятом сумматоре 178, выходной сигнал  которого умножают на выходной сигнал пятого порогового элемента 103 в тридцать седьмом блоке 177 умножения.
которого умножают на выходной сигнал пятого порогового элемента 103 в тридцать седьмом блоке 177 умножения.
Первый выходной сигнал первого привода 13 умножают на выходной сигнал J1 тринадцатого порогового элемента 152 в двадцать четвертом блоке 151 умножения, а также суммируют с первым выходной сигнал второго привода 14 в двадцать втором сумматоре 156, выходной сигнал  которого умножают на выходной сигнал J2 четырнадцатого порогового элемента 155 в двадцать пятом блоке 154 умножения, а также суммируют с первым выходным сигналом третьего привода 15 в двадцать третьем сумматоре 159, выходной сигнал
которого умножают на выходной сигнал J2 четырнадцатого порогового элемента 155 в двадцать пятом блоке 154 умножения, а также суммируют с первым выходным сигналом третьего привода 15 в двадцать третьем сумматоре 159, выходной сигнал  которого умножают на выходной сигнал J3 пятнадцатого порогового элемента 158 в двадцать шестом блоке 157 умножения, выходной сигнал
которого умножают на выходной сигнал J3 пятнадцатого порогового элемента 158 в двадцать шестом блоке 157 умножения, выходной сигнал  которого суммируют с выходным сигналом
которого суммируют с выходным сигналом  двадцать пятого блока 154 умножения в двадцать первом сумматоре 153, выходной сигнал
двадцать пятого блока 154 умножения в двадцать первом сумматоре 153, выходной сигнал  которого суммируют с выходными сигналами тридцать шестого блока 175 умножения, тридцать седьмого блока 177 умножения в двадцать восьмом сумматоре 176. Выходной сигнал двадцать шестого блока 157 умножения суммируют с выходным сигналом сорок третьего блока 185 умножения в тридцать втором сумматоре 186.
которого суммируют с выходными сигналами тридцать шестого блока 175 умножения, тридцать седьмого блока 177 умножения в двадцать восьмом сумматоре 176. Выходной сигнал двадцать шестого блока 157 умножения суммируют с выходным сигналом сорок третьего блока 185 умножения в тридцать втором сумматоре 186.
Выходной сигнал двадцать четвертого блока 151 умножения суммируют с выходным сигналом двадцать первого сумматора 153. Умножение сигналов  ,
,  , m1, являющихся первым выходным сигналом первого привода 13, выходными сигналами пятого квадратора 149, десятого порогового элемента 117 соответственно, производят в двадцать третьем блоке 148 умножения, выходной сигнал
, m1, являющихся первым выходным сигналом первого привода 13, выходными сигналами пятого квадратора 149, десятого порогового элемента 117 соответственно, производят в двадцать третьем блоке 148 умножения, выходной сигнал  которого суммируют с выходными сигналами двадцать второго блока 146 умножения, двадцатого сумматора 150, двадцать четвертого сумматора 160 в девятнадцатом сумматоре 147.
которого суммируют с выходными сигналами двадцать второго блока 146 умножения, двадцатого сумматора 150, двадцать четвертого сумматора 160 в девятнадцатом сумматоре 147.
Третий выходной сигнал второго привода 14 поступает в первый синусный функциональный преобразователь 187, выходной сигнал sinq2н которого умножают на выходной сигнал двенадцатого блока 124 умножения в сорок четвертом блоке 188 умножения, и умножают на выходной сигнал тридцатого блока 165 умножения в пятьдесят пятом блоке 212 умножения. Третий выходной сигнал второго привода 14 суммируют с третьим выходным сигналом третьего привода 15 в тридцать четвертом сумматоре 192, выходной сигнал которого поступает во второй синусный функциональный преобразователь 191, выходной сигнал sin(q2н+q3н) которого умножают на выходной сигнал восемнадцатого блока 137 умножения в сорок пятом блоке 190 умножения, выходной сигнал  которого суммируют с выходным сигналом сорок четвертого блока 188 умножения в тридцать третьем сумматоре 189. Третий выходной сигнал третьего привода 15 поступает в третий синусный функциональный преобразователь 201, выходной сигнал sinq3н которого умножают на выходной сигнал пятнадцатого блока 133 умножения в сорок восьмом блоке 200 умножения, выходной сигнал
которого суммируют с выходным сигналом сорок четвертого блока 188 умножения в тридцать третьем сумматоре 189. Третий выходной сигнал третьего привода 15 поступает в третий синусный функциональный преобразователь 201, выходной сигнал sinq3н которого умножают на выходной сигнал пятнадцатого блока 133 умножения в сорок восьмом блоке 200 умножения, выходной сигнал  которого суммируют с выходным сигналом
которого суммируют с выходным сигналом  сорок пятого блока 190 умножения в сороковом сумматоре 204.
сорок пятого блока 190 умножения в сороковом сумматоре 204.
Два одинаковых сигнала тридцать третьего сумматора 189 суммируют в тридцать пятом сумматоре 193, выходной сигнал  которого умножают на вторые выходные сигналы первого 13, второго 14 приводов в сорок шестом блоке 194 умножения. Два одинаковых сигнала сорок восьмого блока 200 умножения суммируют в тридцать девятом сумматоре 199, выходной сигнал
которого умножают на вторые выходные сигналы первого 13, второго 14 приводов в сорок шестом блоке 194 умножения. Два одинаковых сигнала сорок восьмого блока 200 умножения суммируют в тридцать девятом сумматоре 199, выходной сигнал  которого суммируют с выходным сигналом в сорок пятом блоке 190 умножения в тридцать восьмом сумматоре 198, выходной сигнал
которого суммируют с выходным сигналом в сорок пятом блоке 190 умножения в тридцать восьмом сумматоре 198, выходной сигнал  которого суммируют с выходным сигналом в сорок пятом блоке 190 умножения в тридцать седьмом сумматоре 197, выходной сигнал
которого суммируют с выходным сигналом в сорок пятом блоке 190 умножения в тридцать седьмом сумматоре 197, выходной сигнал  которого умножают на вторые выходные сигналы первого 13, третьего 15 приводов в сорок седьмом блоке 196 умножения.
которого умножают на вторые выходные сигналы первого 13, третьего 15 приводов в сорок седьмом блоке 196 умножения.
Возведение в квадрат второго выходного сигнала первого 13 привода производят в восьмом квадраторе 218, выходной сигнал  которого умножают на выходной сигнал сорокового сумматора 204 в шестьдесят шестом блоке 227 умножения, а также умножают на выходной сигнал тридцать третьего сумматора 189 в пятьдесят девятом блоке 217 умножения. Возведение в квадрат второго выходного сигнала второго 14 привода производят в седьмом квадраторе 206, выходной сигнал
которого умножают на выходной сигнал сорокового сумматора 204 в шестьдесят шестом блоке 227 умножения, а также умножают на выходной сигнал тридцать третьего сумматора 189 в пятьдесят девятом блоке 217 умножения. Возведение в квадрат второго выходного сигнала второго 14 привода производят в седьмом квадраторе 206, выходной сигнал  которого умножают на выходной сигнал сорок восьмого блока 200 умножения в шестьдесят пятом блоке 226 умножения, а также умножают на выходной сигнал тридцать третьего сумматора 189 в пятьдесят первом блоке 205 умножения.
которого умножают на выходной сигнал сорок восьмого блока 200 умножения в шестьдесят пятом блоке 226 умножения, а также умножают на выходной сигнал тридцать третьего сумматора 189 в пятьдесят первом блоке 205 умножения.
Выходной сигнал тридцать восьмого сумматора 198 умножают на вторые выходные сигналы второго 14, третьего 15 приводов в сорок девятом блоке 202 умножения. Выходной сигнал сорокового сумматора 204 умножают на два вторых выходных сигнала третьего 15 привода в пятидесятом блоке 203 умножения, отрицательный выходной сигнал которого суммируют с отрицательными выходными сигналами пятьдесят первого блока 205 умножения, сорок девятого блока 202 умножения, сорок седьмого блока 196 умножения, сорок шестого блока 194 умножения в тридцать шестом сумматоре 195, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в пятьдесят втором блоке 207 умножения. Выходной сигнал седьмого квадратора 206 умножают на выходной сигнал пятьдесят пятого блока 212 умножения в пятьдесят шестом блоке 213 умножения. Выходной сигнал пятьдесят пятого блока 212 умножения умножают на вторые выходные сигналы первого 13, второго 14 приводов в пятьдесят четвертом блоке 211 умножения, отрицательный выходной сигнал которого суммируют с отрицательным выходным сигналом пятьдесят шестого блока 213 умножения в сорок втором сумматоре 210, выходной сигнал которого умножают на выходной сигнал пятого порогового элемента 103, выходной сигнал которого суммируют с выходным сигналом пятьдесят второго блока 207 умножения в сорок первого сумматора 208.
Выходной сигнал восьмого квадратора 218 умножают на выходной сигнал пятьдесят пятого блока 212 умножения в шестьдесят третьем блоке 223 умножения, выходной сигнал которого умножают на выходной сигнал пятого порогового элемента 103 в шестьдесят втором блоке 222 умножения. Выходной сигнал тридцать девятого сумматора 199 умножают на вторые выходные сигналы первого 13, второго 14 приводов в шестьдесят четвертом блоке 224 умножения, выходной сигнал которого суммируют с выходными сигналами шестьдесят пятого блока 226 умножения, шестьдесят шестого блока 227 умножения в сорок пятом сумматоре 225, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в шестьдесят седьмом блоке 228 умножения.
Выходной сигнал сорок восьмого блока 200 умножения умножают на два вторых выходных сигнала третьего 15 привода в пятьдесят седьмом блоке 214 умножения. Выходной сигнал тридцать девятого сумматора 199 умножают на вторые выходные сигналы первого 13, третьего 15 приводов в пятьдесят восьмом блоке 216 умножения. Выходной сигнал тридцать девятого сумматора 199 умножают на вторые выходные сигналы второго 14, третьего 15 приводов в шестидесятом блоке 219 умножения. Выходной сигнал пятьдесят девятого блока 217 умножения суммируют с отрицательными выходными сигналами шестидесятого блока 219 умножения, пятьдесят восьмого блока 216 умножения, пятьдесят седьмого блока 214 умножения в сорок третьем сумматоре 215, выходной сигнал которого умножают на выходной сигнал седьмого порогового элемента 107 в шестьдесят первом блоке 220 умножения, выходной сигнал которого суммируют с выходным сигналом шестьдесят второго блока 222 умножения в сорок четвертом сумматоре 221.
являющихся выходными сигналами двенадцатого 115, девятнадцатого 147, сорок первого 208 сумматоров соответственно, производят в сорок восьмом сумматоре 231, выходной сигнал которого поступает на первый вход первого привода 13.

являющихся выходными сигналами десятого блока 121 умножения, двадцать восьмого 176, сорок четвертого 221 сумматоров соответственно, производят в сорок седьмом сумматоре 230, выходной сигнал которого поступает на первый вход второго привода 14.
являющихся выходными сигналами девятого 120, шестьдесят седьмого 228 блоков умножения, тридцать второго 186 сумматора соответственно, производят в сорок шестом сумматоре 229, выходной сигнал которого поступает на первый вход третьего привода 15.
Таким образом, благодаря созданию задающего устройства с системой силовой обратной связи и исполнительного устройства манипулятора с распределенным устройством захвата объекта удалось обеспечить повышение надежности захвата объекта произвольной формы, улучшение условий работы оператора, повышение качества обратной связи, обеспечивающей оператора информацией о силомоментных воздействиях в захватном устройстве, а также повышение быстродействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2489251C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2017 |
|
RU2688448C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725447C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2551044C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2017 |
|
RU2688449C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725449C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2487008C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705734C1 |
| ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2004 |
|
RU2277043C1 |
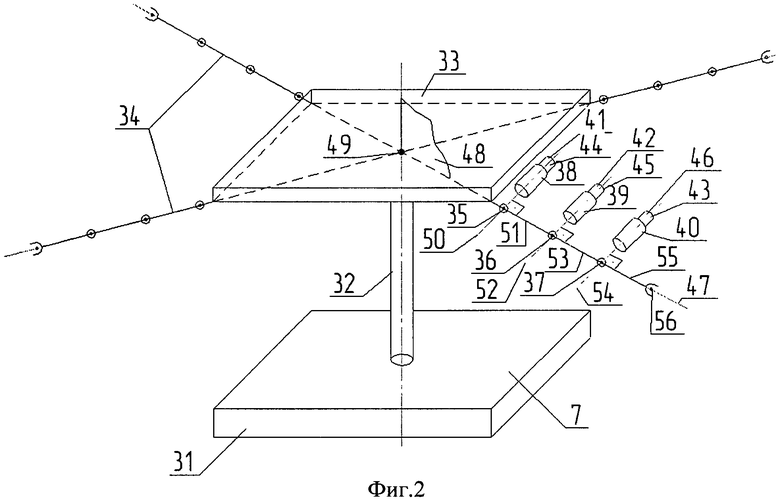
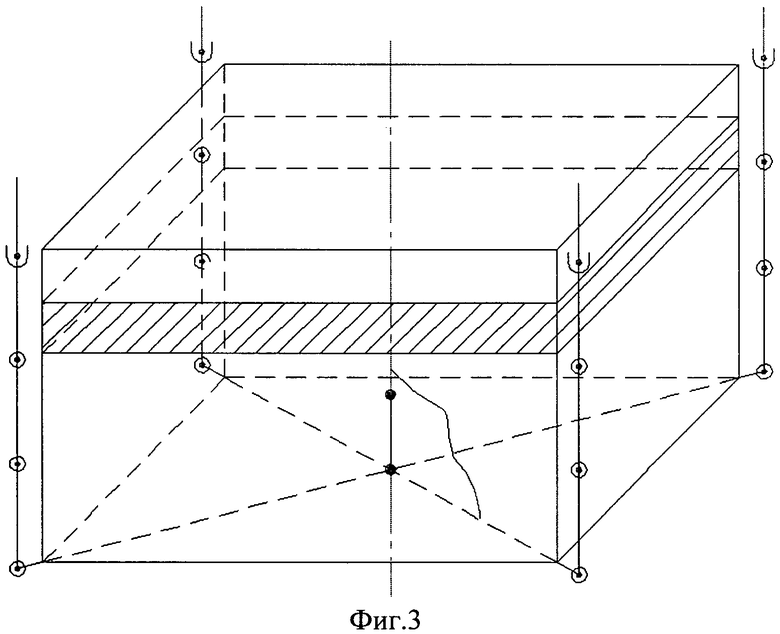
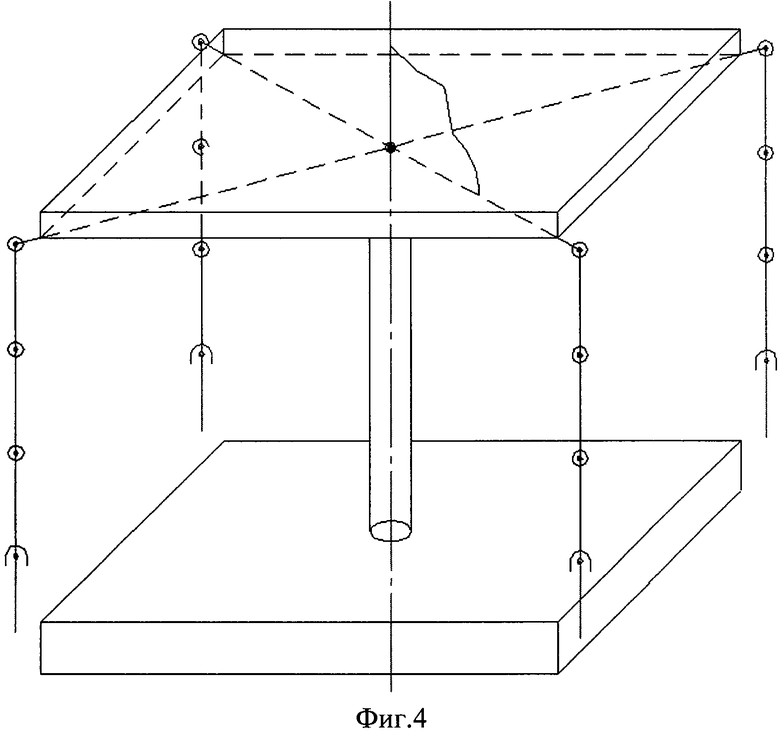

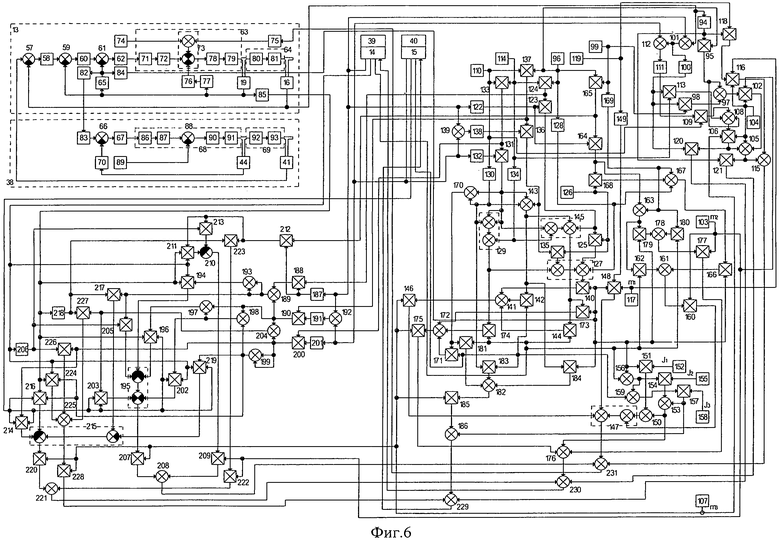
Изобретение относится к подводному судостроению, а именно к управляемым по кабелю связи самоходным подводным аппаратам. Подводный аппарат содержит корпус в форме параллелепипеда, с центром основания на основной плоскости и центром величины корпуса, навесное оборудование, задающее устройство и манипуляционное устройство, содержащее четыре однотипных исполнительных манипулятора, каждый из которых содержит последовательно соединенных три звена с тремя плоскими шарнирами. Линия действия первого исполнительного манипулятора совпадает с его плоскостью действия. Остальные манипуляторы имеют аналогичные схемы. Задающее устройство содержит неподвижное основание с расположенной в центре стойкой, на которой расположена подвижная платформа с установленными однотипными четырьмя задающими манипуляторами, которые кинематически подобны исполнительным манипуляторам. Решение направлено на повышение быстродействия и надежности захвата объекта. 6 ил.
Подводный аппарат, содержащий корпус в форме параллепипеда, с расположенным центром основания корпуса на основной плоскости и выделенным центром величины корпуса с явно выраженной метацентрической высотой, навесное оборудование, задающее устройство, манипуляционное устройство, которое содержит первый, второй, третий, четвертый однотипные исполнительные манипуляторы, каждый из которых содержит последовательно соединенных три звена с тремя плоскими шарнирами, с установленными в них первым, вторым, третьим приводами с первым, вторым, третьим датчиками измерения углового перемещения и первым, вторым, третьим датчиками измерения угловой скорости выходных звеньев, отличающийся тем, что линия действия первого исполнительного манипулятора совпадает с плоскостью действия первого исполнительного манипулятора, проходящей через центр основания и центр величины корпуса, ось вращения первого шарнира перпендикулярна плоскости действия, первое звено первого шарнира соединено последовательно со вторым шарниром, ось вращения второго шарнира перпендикулярна плоскости действия, второе звено второго шарнира соединено последовательно с третьим шарниром, ось вращения третьего шарнира перпендикулярна плоскости действия, третье звено третьего шарнира соединено с захватом, второй, третий, четвертый исполнительные манипуляторы имеют аналогичные схемы относительно центров основания и величины корпуса аппарата, задающее устройство содержит неподвижное основание с расположенной в центре стойкой, на которой расположена подвижная платформа с установленными однотипными первым, вторым, третьим, четвертым задающими манипуляторами, каждый из которых содержит последовательно соединенных три звена с тремя плоскими шарнирами, с установленными в них первым, вторым, третьим приводами с первым, вторым, третьим датчиками измерения углового перемещения и первым, вторым, третьим датчиками измерения угловой скорости выходных звеньев, линия действия первого задающего манипулятора совпадает с плоскостью действия первого задающего манипулятора, проходящей через центр основной плоскости подвижной платформы, ось вращения первого шарнира перпендикулярна плоскости действия, первое звено первого шарнира соединено последовательно со вторым шарниром, ось вращения второго шарнира перпендикулярна плоскости действия, второе звено второго шарнира соединено последовательно с третьим шарниром, ось вращения третьего шарнира перпендикулярна плоскости действия, третье звено третьего шарнира соединено с захватом, второй, третий, четвертый задающие манипуляторы имеют аналогичные схемы относительно центра основной плоскости подвижной платформы, первый привод первого исполнительного манипулятора, содержит последовательно соединенные первый сумматор, первый ограничитель скорости, второй сумматор, первый ограничитель тока, третий сумматор, первый усилитель, первый двигатель, связанный с первым датчиком измерения угловой скорости непосредственно и через первый редуктор с первым датчиком измерения углового перемещения, выход которого соединен с первым отрицательным входом первого сумматора, второй отрицательный вход второго сумматора соединен с выходом первого датчика измерения угловой скорости, второй отрицательный вход третьего сумматора соединен с выходом первого блока дифференцирования, вход которого соединен с выходом первого датчика измерения угловой скорости, второй, третий приводы первого исполнительного манипулятора имеют аналогичные схемы, в первом приводе первого задающего манипулятора последовательно соединенные четвертый сумматор, второй усилитель, второй двигатель, связанный с первым датчиком измерения угловой скорости непосредственно и через второй редуктор с первым датчиком измерения углового перемещения, выход которого соединен с первым входом первого сумматора первого привода первого исполнительного манипулятора, второй отрицательный вход четвертого сумматора соединен с выходом второго блока дифференцирования, вход которого соединен с выходом первого датчика измерения угловой скорости, второй, третий приводы первого задающего манипулятора имеют аналогичные схемы, первый двигатель содержит последовательно соединенные третий усилитель, вход которого соединен с выходом первого усилителя, четвертый усилитель, пятый сумматор, второй вход которого соединен с выходом первого порогового элемента, третий вход - с выходом пятого усилителя, четвертый вход - с выходом первого квадратора, вход которого соединен с выходом шестого усилителя, вход которого соединен с выходом первого датчика измерения угловой скорости, седьмой усилитель, первый интегратор, первый редуктор содержит последовательно соединенные второй интегратор, восьмой усилитель, выход первого блока дифференцирования соединен с входом девятого усилителя, выход которого соединен с входом второго ограничителя тока, выход которого соединен с четвертым сумматором, выход первого блока дифференцирования соединен с входом четырнадцатого усилителя, выход которого является первым выходом первого привода, выход первого датчика измерения угловой скорости соединен с входом пятнадцатого усилителя, выход которого является вторым выходом первого привода, выход первого датчика измерения углового перемещения является третьим выходом первого привода, вход пятого усилителя является первым входом первого привода, второй двигатель содержит последовательно соединенные десятый усилитель, вход которого соединен со вторым усилителем, одиннадцатый усилитель, шестой сумматор, второй вход которого соединен с выходом второго порогового элемента, двенадцатый усилитель, третий интегратор, второй редуктор содержит последовательно соединенные четвертый интегратор, тринадцатый усилитель, третий выход первого привода соединен с входом первого косинусного функционального преобразователя, выход которого соединен с первым входом первого блока умножения, второй вход которого соединен с выходом третьего порогового элемента, выход шестнадцатого блока умножения соединен со вторым входом седьмого сумматора, первый вход которого соединен с выходом второго блока умножения, первый вход которого соединен с выходом четвертого порогового элемента, второй вход соединен с выходом второго косинусного функционального преобразователя, вход которого соединен с выходом восьмого сумматора, первый вход которого соединен с третьим выходом первого привода, второй вход соединен с третьим выходом второго привода, выход седьмого сумматора соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом пятого порогового элемента, третий вход соединен с выходом шестого порогового элемента, выход третьего блока умножения соединен с первым входом девятого сумматора, второй вход которого соединен с выходом шестого порогового элемента, третий вход соединен с выходом четвертого блока умножения, первый вход которого соединен с выходом седьмого порогового элемента, второй вход соединен с выходом шестого порогового элемента, третий вход соединен с выходом десятого сумматора, первый вход которого соединен с выходом первого блока умножения, второй вход соединен с выходом пятого блока умножения, первый вход которого соединен с выходом восьмого порогового элемента, второй вход соединен с выходом третьего косинусного функционального преобразователя, вход которого соединен с выходом одиннадцатого сумматора, первый вход которого соединен с выходом восьмого сумматора, второй вход соединен с третьим выходом третьего привода, третий вход десятого сумматора соединен с выходом шестого блока умножения, первый вход которого соединен с выходом второго косинусного функционального преобразователя, второй вход соединен с выходом девятого порогового элемента, выход девятого сумматора соединен с первым входом двенадцатого сумматора, второй вход которого соединен с выходом седьмого блока умножения, первый вход которого соединен с выходом десятого порогового элемента, второй вход соединен с выходом шестого порогового элемента, третий вход соединен с выходом восьмого блока умножения, первый вход которого соединен с выходом одиннадцатого порогового элемента, второй вход соединен с выходом первого косинусного функционального преобразователя, выход четвертого блока умножения соединен с первым входом девятого блока умножения, второй вход которого соединен с выходом второго косинусного функционального преобразователя, выход девятого сумматора соединен с первым входом десятого блока умножения, второй вход которого соединен с выходом первого косинусного функционального преобразователя, третий выход второго привода соединен с входом четвертого косинусного функционального преобразователя, выход которого соединен с первым входом одиннадцатого блока умножения, второй вход которого соединен с выходом двенадцатого блока умножения, первый вход которого соединен с выходом девятого порогового элемента, второй вход соединен с выходом третьего порогового элемента, выход одиннадцатого блока умножения соединен с первым входом тринадцатого блока умножения, второй вход которого соединен с выходом двенадцатого порогового элемента, а выход соединен с первым входом тринадцатого сумматора, второй вход которого соединен с выходом второго квадратора, вход которого соединен с выходом третьего порогового элемента, третий вход тринадцатого сумматора соединен с выходом четырнадцатого сумматора, первый вход которого соединен с выходом третьего квадратора, вход которого соединен с выходом восьмого порогового элемента, второй и третий входы четырнадцатого сумматора соединены с выходом четырнадцатого блока умножения, первый вход которого соединен с выходом пятого косинусного функционального преобразователя, вход которого соединен с третьим выходом третьего привода, второй вход четырнадцатого блока умножения соединен с выходом пятнадцатого блока умножения, первый вход которого соединен с выходом восьмого порогового элемента, второй вход соединен с выходом девятого порогового элемента, четвертый вход четырнадцатого сумматора соединен с выходом четвертого квадратора, вход которого соединен с выходом девятого порогового элемента, четвертый вход тринадцатого сумматора соединен с выходом шестнадцатого блока умножения, первый вход которого соединен с выходом двенадцатого порогового элемента, второй вход соединен с выходом семнадцатого блока умножения, первый вход которого соединен с выходом восемнадцатого блока умножения, первый вход которого соединен с выходом восьмого порогового элемента, второй вход соединен с выходом третьего порогового элемента, второй вход семнадцатого блока умножения соединен с выходом шестого косинусного функционального преобразователя, вход которого соединен с выходом пятнадцатого сумматора, первый вход которого соединен с третьим выходом третьего привода, второй вход соединен с третьим выходом второго привода, выход тринадцатого сумматора соединен с первым входом девятнадцатого блока умножения, второй вход которого соединен с первым выходом первого привода, а выход девятнадцатого блока умножения соединен с первым входом шестнадцатого сумматора, второй вход которого соединен с выходом двадцатого блока умножения, первый вход которого соединен с первым выходом третьего привода, второй вход соединен с выходом семнадцатого сумматора, первый вход которого соединен с выходом третьего квадратора, второй вход соединен с выходом четырнадцатого блока умножения, третий вход - с выходом семнадцатого блока умножения, третий вход шестнадцатого сумматора соединен с выходом двадцать первого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом восемнадцатого сумматора, первый вход которого соединен с выходом четвертого квадратора, второй вход соединен с выходом четырнадцатого блока умножения, третий вход - с выходом семнадцатого сумматора, четвертый вход - с выходом одиннадцатого блока умножения, выход шестнадцатого сумматора соединен с первым входом двадцать второго блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, выход двадцать второго блока умножения соединен с первым входом девятнадцатого сумматора, второй вход которого соединен с выходом двадцать третьего блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход - с выходом пятого квадратора, вход которого соединен с выходом одиннадцатого порогового элемента, третий вход двадцать третьего блока умножения соединен с выходом десятого порогового элемента, третий вход девятнадцатого сумматора соединен с выходом двадцатого сумматора, первый вход которого соединен с выходом двадцать четвертого блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход соединен с выходом тринадцатого порогового элемента, второй вход двадцатого сумматора соединен с выходом двадцать первого сумматора, первый вход которого соединен с выходом двадцать пятого блока умножения, первый вход которого соединен с выходом четырнадцатого порогового элемента, второй вход соединен с выходом двадцать второго сумматора, первый вход которого соединен с первым выходом второго привода, второй вход соединен с первым выходом первого привода, второй вход двадцать первого сумматора соединен с выходом двадцать шестого блока умножения, первый вход которого соединен с выходом пятнадцатого порогового элемента, второй вход соединен с выходом двадцать третьего сумматора, первый вход которого соединен с выходом двадцать второго сумматора, второй вход соединен с первым выходом третьего привода, четвертый вход девятнадцатого сумматора соединен с выходом двадцать седьмого блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом двадцать четвертого сумматора, первый вход которого соединен с выходом двадцать восьмого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом тридцатого сумматора, первый вход которого соединен с выходом двадцать девятого блока умножения, первый вход которого соединен с выходом четвертого косинусного функционального преобразователя, второй вход соединен с выходом тридцатого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, второй вход соединен с выходом четвертого порогового элемента, второй вход двадцать четвертого сумматора соединен с выходом тридцать первого блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход соединен с выходом двадцать пятого сумматора, первый вход которого соединен с выходом второго квадратора, второй вход соединен с выходом тридцать второго блока умножения, первый вход которого соединен с выходом двенадцатого порогового элемента, второй вход соединен с выходом двадцать девятого блока умножения, третий вход двадцать пятого сумматора соединен с выходом шестого квадратора, вход которого соединен с выходом четвертого порогового элемента, выход третьего квадратора соединен с первым входом двадцать шестого сумматора, второй вход которого соединен с выходом четырнадцатого блока умножения, а выход соединен с первым входом тридцать третьего блока умножения, второй вход которого соединен с первым выходом третьего привода, а выход соединен с первым входом двадцать седьмого сумматора, второй вход которого соединен с выходом тридцать четвертого блока умножения, первый вход которого соединен с выходом восемнадцатого сумматора, второй вход соединен с первым выходом первого привода, третий вход двадцать седьмого сумматора соединен с выходом тридцать пятого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом четырнадцатого сумматора, выход двадцать седьмого сумматора соединен с первым входом тридцать шестого блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход соединен с первым входом двадцать восьмого сумматора, второй вход которого соединен с выходом двадцать первого сумматора, третий вход соединен с выходом тридцать седьмого блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом двадцать девятого сумматора, первый вход которого соединен с выходом тридцать восьмого блока умножения, первый вход которого соединен с первым выходом первого привода, второй вход соединен с выходом тридцатого сумматора, второй вход которого соединен с выходом шестого квадратора, второй вход двадцать девятого сумматора соединен с выходом тридцать девятого блока умножения, первый вход которого соединен с первым выходом второго привода, второй вход соединен с выходом шестого квадратора, выход двадцать шестого сумматора соединен с первым входом сорокового блока умножения, второй вход которого соединен с первым выходом второго привода, а выход соединен с первым входом тридцать первого сумматора, второй вход которого соединен с выходом сорок первого блока умножения, первый вход которого соединен с выходом третьего квадратора, второй вход соединен с первым выходом третьего привода, третий вход тридцать первого сумматора соединен с выходом сорок второго блока умножения, первый вход которого соединен с выходом семнадцатого сумматора, второй вход соединен с первым выходом первого привода, выход тридцать первого сумматора соединен с первым входом сорок третьего блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход соединен с первым входом тридцать второго сумматора, второй вход которого соединен с выходом двадцать шестого блока умножения, третий выход второго привода соединен с входом первого синусного функционального преобразователя, выход которого соединен с первым входом сорок четвертого блока умножения, второй вход которого соединен с выходом двенадцатого блока умножения, а выход соединен с первым входом тридцать третьего сумматора, второй вход которого соединен с выходом сорок пятого блока умножения, первый вход которого соединен с выходом восемнадцатого блока умножения, второй вход соединен с выходом второго синусного функционального преобразователя, вход которого соединен с выходом тридцать четвертого сумматора, первый вход которого соединен с третьим выходом второго привода, второй вход соединен с третьим выходом третьего привода, выход тридцать третьего сумматора соединен с первым и вторым входами тридцать пятого сумматора, выход которого соединен с первым входом сорок шестого блока умножения, второй вход которого соединен со вторым выходом первого привода, третий вход соединен со вторым выходом второго привода, выход сорок шестого блока умножения соединен с первым отрицательным входом тридцать шестого сумматора, второй отрицательный вход которого соединен с выходом сорок седьмого блока умножения, первый вход которого соединен со вторым выходом первого привода, второй вход соединен со вторым выходом третьего привода, третий вход - с выходом тридцать седьмого сумматора, первый вход которого соединен с выходом сорок пятого блока умножения, второй вход соединен с выходом тридцать восьмого сумматора, первый вход которого соединен с выходом сорок пятого блока умножения, второй вход соединен с выходом тридцать девятого сумматора, первый и второй выходы которого соединен с выходом сорок восьмого блока умножения, первый вход которого соединен с выходом пятнадцатого блока умножения, второй вход соединен с выходом третьего синусного функционального преобразователя, вход которого соединен с третьим выходом третьего привода, третий отрицательный вход тридцать шестого сумматора соединен с выходом сорок девятого блока умножения, первый вход которого соединен со вторым выходом третьего привода, второй вход соединен с выходом тридцать восьмого сумматора, третий вход - со вторым выходом второго привода, четвертый отрицательный вход тридцать шестого сумматора соединен с выходом пятидесятого блока умножения, первый и второй входы которого соединены со вторым выходом третьего привода, третий вход с выходом сорокового сумматора, первый вход которого соединен с выходом сорок пятого блока умножения, второй вход - с выходом сорок восьмого блока умножения, пятый отрицательный вход тридцать шестого сумматора соединен с выходом пятьдесят первого блока умножения, первый вход которого соединен с выходом седьмого квадратора, выход которого соединен со вторым выходом второго привода, второй вход пятьдесят первого блока умножения соединен с выходом тридцать третьего сумматора, выход тридцать шестого сумматора соединен с первым входом пятьдесят второго блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход соединен с первым входом сорок первого сумматора, второй вход которого соединен с выходом пятьдесят третьего блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом сорок второго сумматора, первый отрицательный вход которого соединен с выходом пятьдесят четвертого блока умножения, первый вход которого соединен со вторым выходом второго привода, второй вход соединен со вторым выходом первого привода, третий вход - с выходом пятьдесят пятого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, второй вход соединен с выходом тридцатого блока умножения, второй отрицательный вход сорок второго сумматора соединен с выходом пятьдесят шестого блока умножения, первый вход которого соединен с выходом седьмого квадратора, второй вход соединен с выходом пятьдесят пятого блока умножения, второй вход третьего привода соединен с первым и вторым входами пятьдесят седьмого блока умножения, третий вход которого соединен с выходом сорок восьмого блока умножения, а выход соединен с первым отрицательным входом сорок третьего сумматора, второй отрицательный вход которого соединен с выходом пятьдесят восьмого блока умножения, первый вход которого соединен со вторым выходом третьего привода, второй вход соединен со вторым выходом первого привода, а третий вход - с выходом тридцать девятого сумматора, третий вход сорок третьего сумматора соединен с выходом пятьдесят девятого блока умножения, первый вход которого соединен с выходом тридцать третьего сумматора, второй вход соединен с выходом восьмого квадратора, вход которого соединен со вторым входом первого привода, четвертый отрицательный вход сорок третьего сумматора соединен с выходом шестидесятого блока умножения, первый вход которого соединен со вторым выходом второго привода, второй вход соединен с выходом тридцать девятого сумматора, третий вход соединен со вторым выходом третьего привода, выход сорок третьего сумматора соединен с первым входом шестьдесят первого блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, а выход - с первым входом сорок четвертого сумматора, второй вход которого соединен с выходом шестьдесят второго блока умножения, первый вход которого соединен с выходом пятого порогового элемента, второй вход соединен с выходом шестьдесят третьего блока умножения, первый вход которого соединен с выходом восьмого квадратора, второй вход соединен с выходом пятьдесят пятого блока умножения, второй выход первого привода соединен с первым входом шестьдесят четвертого блока умножения, второй вход которого соединен со вторым выходом второго привода, третий вход соединен с выходом тридцать девятого сумматора, а выход - с первым входом сорок пятого сумматора, второй вход которого соединен с выходом шестьдесят пятого блока умножения, первый вход которого соединен с выходом седьмого квадратора, второй вход соединен с выходом сорок восьмого блока умножения, третий вход сорок пятого сумматора соединен с выходом шестьдесят шестого блока умножения, первый вход которого соединен с выходом восьмого квадратора, второй вход соединен с выходом сорокового сумматора, выход сорок пятого сумматора соединен с первым входом шестьдесят седьмого блока умножения, второй вход которого соединен с выходом седьмого порогового элемента, выход соединен с первым входом сорок шестого сумматора, второй вход которого соединен с выходом тридцать второго сумматора, третий вход соединен с выходом девятого блока умножения, а выход соединен с первым входом, третьего привода, выход сорок четвертого сумматора соединен с первым входом сорок седьмого сумматора, второй вход которого соединен с выходом двадцать восьмого сумматора, третий вход соединен с выходом десятого блока умножения, а выход соединен с первым входом второго привода, выход сорок первого сумматора соединен с первым входом сорок восьмого сумматора, второй вход которого соединен с выходом девятнадцатого сумматора, третий вход соединен с выходом двенадцатого сумматора, а выход соединен с первым входом первого привода.
| JP 2004284454 А, 14.10.2004 | |||
| US 5069580 А, 03.12.1991 | |||
| ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2004 |
|
RU2277043C1 |
| SU 1338244 А1, 10.11.1996. | |||

