Изобретение относится к области управления манипуляторами, а именно к задающим устройствам управления, обладающим шестью степенями свободы выходного звена.
Известно устройство, выполненное на основе механизма параллельной кинематической структуры (ПКС), содержащее подвижную платформу и неподвижное основание, а также шесть идентичных кинематических цепей, с одной стороны замкнутых на общее неподвижное основание, а с другой - на общую подвижную платформу, имеющих датчики в составе телескопических звеньев (Патент США №4216467, 05.08.1980).
Недостатком данного устройства является сложность определения координаты вращения подвижной платформы, объясняемая наличием шести компонент используемых для ее определения, кроме того, не ясен алгоритм вычисления координат центра подвижной платформы.
Также известно задающее устройство, выполненное на основе механизма ПКС, состоящего из пяти кинематических цепей, содержащих призматические звенья. (Международная заявка (WO) №87/03239, 04.06.1987).
Недостатком данного задающего устройства, выбранного за прототип, является то, что с помощью этого механизма возможно сформировать только пятикомпонентный задающий вектор.
Общим недостатком аналога и прототипа является отсутствие схемы обработки сигнала.
Задачей, на решение которой направлено предлагаемое изобретение, является создание задающего устройства для управления шестистепенным объектом в дистанционном режиме.
Технический результат, который при этом достигается, выражается в упрощении конструкции задающего органа, включающей в свой состав механизм ПКС, повышении быстродействия при управлении подвижным объектом и технологичности изготовления.
Поставленная задача достигается тем, что задающее устройство для дистанционного управления манипулятором, содержащее подвижную платформу с установленной на ней рукояткой управления, неподвижное основание, на котором установлены первые сферические шарниры, соединенные каждый с соответствующей стойкой, с расположенными на ней призматическими шарнирами, на которых расположены первый, второй, третий и четвертый датчики измерения линейного перемещения каждого выходного звена, каждое из которых соединено с помощью второго сферического шарнира с подвижной платформой, отличается тем, что центры первых четырех сферических шарниров установлены на ортогональных осях симметрии неподвижного основания и равноудалены от точки пересечения ортогональных осей симметрии неподвижного основания, совпадающего с центром крестовины первого шарнира Гука, первое звено которого неподвижно закреплено на неподвижном основании, шарнирно соединено с помощью крестовины со вторым звеном первого шарнира Гука, которое шарнирно соосно соединено с промежуточным звеном, снабженным фиксатором ограничения перемещения вдоль оси промежуточного звена и соединенным с помощью призматического шарнира с выходным звеном, соединенным с первым звеном второго шарнира Гука, центр крестовины которого совпадает с центром подвижной платформы и с точкой пересечения ортогональных осей симметрии подвижной платформы, на которой закреплено второе звено второго шарнира Гука, а вторые четыре сферических шарнира установлены на ортогональных осях симметрии подвижной платформы с равным удалением от ее центра, при этом в исходном состоянии положение крестовин неподвижного основания и подвижной платформы совпадает с расположением ортогональных осей симметрии неподвижного основания и ортогональных осей симметрии подвижной платформы, а на втором звене первого шарнира Гука установлен датчик измерения вращения промежуточного звена, пятый датчик измерения линейного перемещения выходного звена вдоль оси промежуточного звена установлен на призматическом шарнире, второе звено второго шарнира Гука снабжено релейным элементом, причем выход первого датчика измерения линейного перемещения соединен с входом первого функционального преобразователя, выход которого соединен с входом первого квадратора, выход которого соединен с первым отрицательным входом первого сумматора, второй отрицательный вход которого соединен с выходом второго квадратора, вход которого соединен с выходом второго функционального преобразователя, вход которого соединен с выходом третьего датчика измерения линейного перемещения, а третий положительный вход первого сумматора соединен с выходом первого блока умножения, первый вход которого соединен с выходом второго сумматора, первый вход которого соединен с выходом третьего квадратора, вход которого соединен с выходом третьего преобразователя, вход которого соединен с выходом пятого датчика измерения линейного перемещения, второй вход второго сумматора соединен с выходом четвертого квадратора, вход которого соединен с выходом первого порогового элемента, третий вход второго сумматора соединен с выходом пятого квадратора, вход которого соединен с выходом второго порогового элемента, второй вход первого блока умножения соединен с выходом третьего порогового элемента, выход первого сумматора соединен с входом первого делителя, второй вход которого соединен с выходом второго блока умножения, первый вход которого соединен с выходом первого порогового элемента, второй вход соединен с выходом четвертого порогового элемента, а третий вход соединен с выходом второго порогового элемента, выход первого делителя соединен с первым входом второго делителя, второй вход которого соединен с выходом первого косинусного функционального преобразователя, вход которого соединен с выходом четвертого функционального преобразователя, вход которого соединен с выходом датчика измерения вращения, выход второго делителя соединен со входом арккосинусного функционального преобразователя, выход которого соединен со входом блока определения модуля, выход которого соединен со вторым входом третьего блока умножения, первый вход которого соединен с выходом пятого функционального преобразователя, вход которого соединен с выходом релейного элемента, выход третьего блока умножения соединен с входом шестого функционального преобразователя, выход первого блока умножения соединен, также, с первым положительным входом третьего сумматора, второй отрицательный вход которого соединен с выходом шестого квадратора, вход которого соединен с выходом седьмого функционального преобразователя, вход которого соединен с выходом второго датчика измерения линейного перемещения, третий отрицательный вход сумматора соединен с выходом седьмого квадратора, вход которого соединен с выходом восьмого функционального преобразователя, вход которого соединен с выходом четвертого датчика измерения линейного перемещения, а выход третьего сумматора соединен со вторым входом третьего делителя, первый вход которого соединен с выходом второго блока умножения, а выход соединен со вторым входом четвертого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, а третий вход соединен с выходом пятого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, вход которого соединен с выходом третьего блока умножения, а второй вход пятого блока умножения соединен с выходом второго синусного функционального преобразователя, вход которого соединен с выходом четвертого функционального преобразователя, выход четвертого блока умножения соединен с входом восьмого квадратора, выход которого соединен с первым входом четвертого сумматора, второй отрицательный вход которого соединен с выходом шестого блока умножения, первый вход которого соединен с выходом четвертого порогового элемента, а второй вход соединен с выходом пятого сумматора, первый положительный вход которого соединен с выходом девятого квадратора, вход которого соединен с выходом третьего делителя, второй отрицательный вход пятого сумматора соединен с выходом десятого квадратора, вход которого соединен с выходом первого косинусного функционального преобразователя, третий вход шестого блока умножения соединен с выходом шестого сумматора, первый вход которого соединен с выходом одиннадцатого квадратора, вход которого соединен с выходом пятого блока умножения, а второй вход шестого сумматора соединен с выходом десятого квадратора, выход четвертого сумматора соединен с входом первого блока извлечения корня квадратного, выход которого соединен со вторым входом седьмого сумматора, первый отрицательный вход которого соединен с выходом четвертого блока умножения, а выход седьмого сумматора соединен с первым входом четвертого делителя, второй вход которого соединен с выходом седьмого блока умножения, первый вход которого соединен с выходом шестого сумматора, а второй вход соединен с выходом третьего порогового элемента, выход четвертого делителя соединен с входом арксинусного функционального преобразователя, выход которого соединен с входом девятого функционального преобразователя, а также с входом второго косинусного функционального преобразователя, выход которого соединен со вторым входом восьмого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, третий вход соединен с выходом первого косинусного функционального преобразователя, а выход соединен со вторым отрицательным входом восьмого сумматора, первый положительный вход которого соединен с выходом девятого блока умножения, первый вход которого соединен с выходом второго синусного функционального преобразователя, а второй вход соединен с выходом четвертого делителя, выход восьмого сумматора соединен со вторым входом десятого блока умножения, первый вход которого соединен с выходом первого порогового элемента, а выход соединен со вторым входом пятого делителя, первый вход которого соединен с выходом девятого сумматора, первый отрицательный вход которого соединен с выходом второго порогового элемента, а второй положительный вход соединен с выходом одиннадцатого блока умножения, первый вход которого соединен с выходом первого порогового элемента, а второй вход соединен с выходом первого делителя, выход пятого делителя соединен с первым входом двенадцатого блока умножения, второй вход которого соединен с выходом шестого делителя, который также соединен с входом десятого функционального преобразователя, выход первого порогового элемента соединен с первым входом тринадцатого блока умножения, второй вход которого соединен с выходом второго порогового элемента, третий вход соединен с выходом третьего порогового элемента, а выход соединен с первым входом четырнадцатого блока умножения, второй вход которого соединен с выходом первого делителя, а выход соединен с третьим отрицательным входом десятого сумматора, второй положительный вход которого соединен с выходом второго сумматора, первый отрицательный вход десятого сумматора соединен с выходом первого квадратора, а выход десятого сумматора соединен со вторым входом седьмого делителя, первый вход которого соединен с выходом пятнадцатого блока умножения, первый вход которого соединен с выходом девятого сумматора, а второй вход соединен с выходом третьего порогового элемента, выход седьмого делителя соединен с первым входом шестнадцатого блока умножения, второй вход которого соединен с выходом восьмого делителя, первый вход которого соединен с выходом семнадцатого блока умножения, первый вход которого соединен с выходом восемнадцатого блока умножения, первый вход которого соединен с выходом второго делителя, а второй вход соединен с выходом второго синусного функционального преобразователя, второй вход семнадцатого блока умножения соединен с выходом первого порогового элемента, второй вход восьмого делителя соединен с выходом одиннадцатого сумматора, первый отрицательный вход которого соединен с выходом второго порогового элемента, а второй положительный вход соединен с выходом девятнадцатого блока умножения, первый вход которого соединен с выходом первого порогового элемента, а второй вход соединен с выходом третьего делителя, выход тринадцатого блока умножения также соединен с первым входом двадцатого блока умножения, второй вход которого соединен с выходом третьего делителя, а выход соединен с третьим отрицательным входом двенадцатого сумматора, второй вход которого соединен с выходом второго сумматора, первый отрицательный вход двенадцатого сумматора соединен с выходом шестого квадратора, а выход двенадцатого сумматора соединен со вторым входом девятого делителя, первый вход которого соединен с выходом двадцать первого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, второй вход соединен с выходом семнадцатого блока умножения, а выход девятого делителя соединен со вторым входом двадцать второго блока умножения, первый вход которого соединен с выходом десятого делителя, первый вход которого соединен с входом девятого сумматора, второй вход десятого делителя соединен с выходом двадцать третьего блока умножения, первый вход которого соединен с выходом первого порогового элемента, а второй вход соединен с выходом тринадцатого сумматора, первый вход которого соединен с выходом двадцать четвертого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, а второй вход соединен с выходом двадцать пятого блока умножения, второй вход которого соединен с выходом четвертого делителя, первый вход двадцать пятого блока умножения соединен с выходом первого косинусного функционального преобразователя, второй вход тринадцатого сумматора соединен с выходом двадцать шестого блока умножения, первый вход которого соединен с выходом второго синусного функционального преобразователя, второй вход соединен с выходом второго косинусного функционального преобразователя, выход двадцать шестого блока умножения также соединен со вторым входом двадцать седьмого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, а выход двадцать седьмого блока умножения соединен с первым входом четырнадцатого сумматора, второй вход которого соединен с выходом двадцать пятого блока умножения, выход четырнадцатого сумматора соединен со вторым входом одиннадцатого делителя, первый вход которого соединен с выходом восемнадцатого блока умножения, выход одиннадцатого делителя соединен с первым входом пятнадцатого сумматора, второй вход которого соединен с выходом пятого делителя, а выход соединен с входом двенадцатого квадратора, выход которого соединен с третьим входом шестнадцатого сумматора, первый вход которого соединен с выходом тринадцатого квадратора, вход которого соединен с выходом семнадцатого сумматора, первый отрицательный вход которого соединен с выходом двадцать восьмого блока умножения, первый вход которого соединен с выходом десятого делителя, а второй вход соединен с выходом одиннадцатого делителя, выход пятнадцатого сумматора также соединен с третьим входом двадцать девятого блока умножения, первый вход которого соединен с выходом восемнадцатого сумматора, первый отрицательный вход которого соединен с выходом седьмого делителя, второй отрицательный вход восемнадцатого сумматора соединен с выходом девятого делителя, второй вход двадцать девятого блока умножения соединен с выходом третьего порогового элемента, выход восемнадцатого сумматора также соединен с входом четырнадцатого квадратора, выход которого соединен с третьим входом девятнадцатого сумматора, второй вход которого соединен с выходом пятнадцатого квадратора, вход которого соединен с выходом двадцатого сумматора, первый отрицательный вход которого соединен с выходом двадцать второго блока умножения, второй вход соединен с выходом шестнадцатого блока умножения, а выход также соединен с третьим входом тридцатого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, а второй вход соединен с выходом семнадцатого сумматора, второй вход которого соединен с выходом тридцать первого блока умножения, первый вход которого соединен с выходом восьмого делителя, второй вход тридцать первого блока умножения соединен с выходом пятого делителя, выход тридцатого блока умножения соединен с первым входом двадцать первого сумматора, второй отрицательный вход которого соединен с выходом двадцать девятого блока умножения, а выход соединен с первым отрицательным входом двадцать второго сумматора, второй вход которого соединен с выходом второго блока извлечения корня квадратного, вход которого соединен с выходом двадцать третьего сумматора, первый вход которого соединен с выходом шестнадцатого квадратора, вход которого соединен с выходом двадцатого первого сумматора, второй отрицательный вход двадцать третьего сумматора соединен с выходом тридцать второго блока умножения, третий вход которого соединен с выходом девятнадцатого сумматора, первый отрицательный вход которого соединен с выходом тридцать третьего блока умножения, первый вход которого соединен с выходом третьего квадратора, а второй вход соединен с выходом семнадцатого квадратора, вход которого соединен с выходом двадцать четвертого сумматора, первый вход которого соединен с выходом десятого делителя, а второй вход соединен с выходом восьмого делителя, выход семнадцатого квадратора также соединен со вторым входом шестнадцатого сумматора, выход которого соединен с первым входом тридцать второго блока умножения, второй вход которого соединен с выходом четвертого порогового элемента; также выход пятнадцатого сумматора соединен с первым входом тридцать четвертого блока умножения, второй вход которого соединен с выходом шестого делителя, а выход соединен со вторым отрицательным входом двадцать пятого сумматора, первый вход которого соединен с выходом восемнадцатого сумматора, а выход соединен с первым входом двенадцатого делителя, второй вход которого соединен с выходом двадцать четвертого сумматора, а выход двенадцатого делителя, соединен с входом одиннадцатого функционального преобразователя, а также соединен со вторым входом тридцать пятого блока умножения, первый вход которого соединен с выходом десятого делителя, а выход тридцать пятого блока умножения соединен со вторым отрицательным входом двадцать шестого сумматора, третий отрицательный вход которого соединен с выходом седьмого делителя, первый отрицательный вход двадцать шестого сумматора соединен с выходом двенадцатого блока умножения, а выход соединен с входом двенадцатого функционального преобразователя, выход шестнадцатого сумматора соединен со вторым входом тридцать шестого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, а выход соединен с первым входом шестого делителя, второй вход которого соединен с выходом двадцать второго сумматора.
Сопоставительный анализ существенных признаков заявляемого решения с существенными признаками аналогов и прототипа свидетельствует о соответствии предлагаемого технического решения критерию ″новизна″.
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет повысить быстродействие системы дистанционного управления, в состав которой входит заявленное техническое решение, а также повысить точность задающего сигнала.
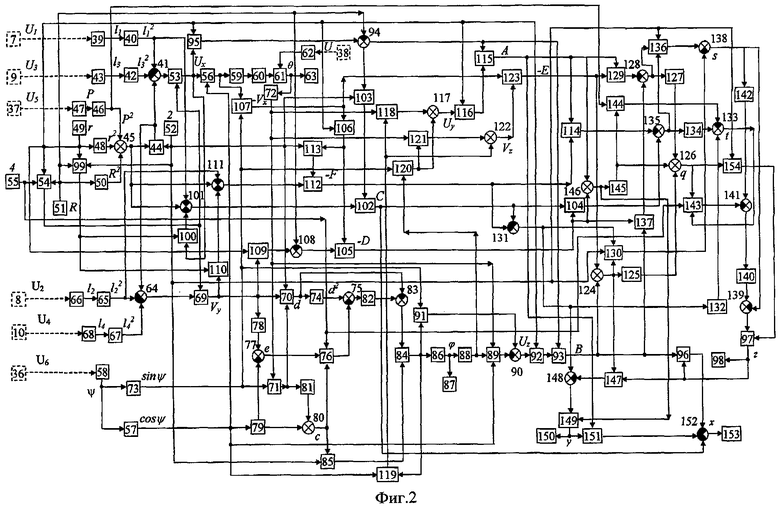
Предлагаемое решение поясняется чертежами. На фиг.1. показана кинематическая схема задающего устройства для дистанционного управления манипулятором, а на фиг.2. показана функциональная схема обработки сигнала задающего устройства для дистанционного управления манипулятором.
Устройство содержит подвижную платформу 1, с расположенной на ней рукояткой 2 управления, соединенную с неподвижным основанием 3, на котором установлены первые сферические шарниры 4, соединенные со стойками 5, с установленными на них призматическими шарнирами 6, с установленными на них первым 7, вторым 8, третьим 9 и четвертым 10 датчиками измерения линейного перемещения выходных звеньев 11, которые соединены с помощью вторых сферических шарниров 12 с подвижной платформой 1. Центры 13 первых четырех сферических шарниров 4 установлены на ортогональных осях 14 и 15 симметрии неподвижного основания 3 и равноудалены от точки 16 их пересечения, совпадающего с центром 17 крестовины 18 первого шарнира 19 Гука, первое звено 20 которого неподвижно закреплено на неподвижном основании 3, шарнирно соединено с помощью крестовины 18 со вторым звеном 21 первого шарнира 19 Гука, которое шарнирно соосно соединено с промежуточным звеном 22, снабженным фиксатором 23 ограничения перемещения вдоль оси 24 и соединенным с помощью призматического шарнира 25 с выходным звеном 26, соединенным с первым звеном 27 второго шарнира 28 Гука, центр 29 крестовины 30 которого совпадает с центром 31 подвижной платформы 1 и с точкой 32 пересечения ортогональных осей 33 и 34 симметрии подвижной платформы 1, на которой закреплено второе звено 35 второго шарнира 28 Гука, а вторые четыре сферических шарнира 12 установлены на ортогональных осях 33 и 34 симметрии подвижной платформы 1 с равным удалением от ее центра 31. При этом исходное состояние положения крестовин 18 и 30 совпадает с расположением ортогональных осей 14 и 15 симметрии неподвижного основания 3 и ортогональных осей 33 и 34 симметрии подвижной платформы 1. На втором 21 звене первого шарнира 19 Гука установлен датчик 36 измерения вращения промежуточного звена 25, на котором установлен пятый датчик 37 измерения линейного перемещения выходного звена 26 вдоль оси 24 промежуточного звена 22. Второе звено 35 второго шарнира 28 Гука снабжено релейным элементом 38. Релейный элемент 38 имеет два состояния. Первое состояние соответствует отклонению подвижной платформы 1 относительно оси 34 (v) симметрии в положительном направлении, включая нулевое отклонение, и характеризуется наличием выходного напряжения. Под положительным направлением поворота подвижной платформы 1 понимают поворот ее относительно оси 34 (v) симметрии по направлению движения часовой стрелки, при котором ось 34 (v) симметрии направлена на наблюдателя. Второе состояние соответствует отклонению подвижной платформы 1 относительно оси 34 (v) симметрии в отрицательном направлении и характеризуется отсутствием выходного напряжения. Под отрицательным направлением вращения здесь понимают вращение подвижной платформы 1 относительно оси 34 (v) симметрии против движения часовой стрелки при ориентации оси 34 (v) симметрии таким образом, что она направлена на наблюдателя. Выход первого датчика 7 измерения линейного перемещения соединен с входом первого функционального преобразователя 39, выход которого соединен с входом первого квадратора 40, выход которого соединен с первым отрицательным входом первого сумматора 41, второй отрицательный вход которого соединен с выходом второго квадратора 42, вход которого соединен с выходом второго функционального преобразователя 43, вход которого соединен с выходом третьего датчика 9 измерения линейного перемещения, а третий положительный вход первого сумматора 41 соединен с выходом первого блока 44 умножения, первый вход которого соединен с выходом второго сумматора 45, первый вход которого соединен с выходом третьего квадратора 46, вход которого соединен с выходом третьего функционального преобразователя 47, вход которого соединен с выходом пятого датчика 37 измерения линейного перемещения, второй вход второго сумматора 45 соединен с выходом четвертого квадратора 48, вход которого соединен с выходом первого порогового элемента 49, третий вход второго сумматора 45 соединен с выходом пятого квадратора 50, вход которого соединен с выходом второго порогового элемента 51, второй вход первого блока 44 умножения соединен с выходом третьего порогового элемента 52, выход первого сумматора 41 соединен с входом первого делителя 53, второй вход которого соединен с выходом второго блока 54 умножения, первый вход которого соединен с выходом первого порогового элемента 49, второй вход соединен с выходом четвертого порогового элемента 55, а третий вход соединен с выходом второго порогового элемента 51. Выход первого делителя 53 соединен с первым входом второго делителя 56, второй вход которого соединен с выходом первого косинусного функционального преобразователя 57, вход которого соединен с выходом четвертого функционального преобразователя 58, вход которого соединен с выходом датчика 36 измерения вращения. Выход второго делителя 56 соединен со входом арккосинусного функционального преобразователя 59, выход которого соединен со входом блока 60 определения модуля, выход которого соединен со вторым входом третьего блока 61 умножения, первый вход которого соединен с выходом пятого функционального преобразователя 62, вход которого соединен с выходом релейного элемента 38. Выход третьего блока 61 умножения соединен с входом шестого функционального преобразователя 63. Выход первого блока 44 умножения соединен также с первым положительным входом третьего сумматора 64, второй отрицательный вход которого соединен с выходом шестого квадратора 65, вход которого соединен с выходом седьмого функционального преобразователя 66, вход которого соединен с выходом второго датчика 8 измерения линейного перемещения. Третий отрицательный вход сумматора 64 соединен с выходом седьмого квадратора 67, вход которого соединен с выходом восьмого функционального преобразователя 68, вход которого соединен с выходом четвертого датчика 10 измерения линейного перемещения, а выход третьего сумматора 64 соединен со вторым входом третьего делителя 69, первый вход которого соединен с выходом второго блока 54 умножения, а выход соединен со вторым входом четвертого блока 70 умножения, первый вход которого соединен с выходом третьего порогового элемента 52, а третий вход соединен с выходом пятого блока 71 умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя 72, вход которого соединен с выходом третьего блока 61 умножения, а второй вход пятого блока 71 умножения соединен с выходом второго синусного функционального преобразователя 73, вход которого соединен с выходом четвертого функционального преобразователя 58. Выход четвертого блока 70 умножения соединен с входом восьмого квадратора 74, выход которого соединен с первым входом четвертого сумматора 75, второй отрицательный вход которого соединен с выходом шестого блока 76 умножения, первый вход которого соединен с выходом четвертого порогового элемента 55, а второй вход соединен с выходом пятого сумматора 77, первый положительный вход которого соединен с выходом девятого квадратора 78, вход которого соединен с выходом третьего делителя 69. Второй отрицательный вход пятого сумматора 77 соединен с выходом десятого квадратора 79, вход которого соединен с выходом первого косинусного функционального преобразователя 57. Третий вход шестого блока 76 умножения соединен с выходом шестого сумматора 80, первый вход которого соединен с выходом одиннадцатого квадратора 81, вход которого соединен с выходом пятого блока 71 умножения, а второй вход шестого сумматора 80 соединен с выходом десятого квадратора 79. Выход четвертого сумматора 75 соединен со входом первого блока 82 извлечения корня квадратного, выход которого соединен со вторым входом седьмого сумматора 83, первый отрицательный вход которого соединен с выходом четвертого блока 70 умножения, а выход седьмого сумматора 83 соединен с первым входом четвертого делителя 84, второй вход которого соединен с выходом седьмого блока 85 умножения, первый вход которого соединен с выходом шестого сумматора 80, а второй вход соединен с выходом третьего порогового элемента 52. Выход четвертого делителя 84 соединен с входом арксинусного функционального преобразователя 86, выход которого соединен с входом девятого функционального преобразователя 87, а также с входом второго косинусного функционального преобразователя 88, выход которого соединен со вторым входом восьмого блока 89 умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя 72, а третий вход восьмого блока 89 умножения соединен с выходом первого косинусного функционального преобразователя 57, а выход соединен со вторым отрицательным входом восьмого сумматора 90, первый положительный вход которого соединен с выходом девятого блока 91 умножения, первый вход которого соединен с выходом второго синусного функционального преобразователя 73, а второй вход соединен с выходом четвертого делителя 84. Выход восьмого сумматора 90 соединен со вторым входом десятого блока 92 умножения, первый вход которого соединен с выходом первого порогового элемента 49, а выход соединен со вторым входом пятого делителя 93, первый вход которого соединен с выходом девятого сумматора 94, первый отрицательный вход которого соединен с выходом второго порогового элемента 51, а второй положительный вход соединен с выходом одиннадцатого блока 95 умножения, первый вход которого соединен с выходом первого порогового элемента 49, а второй вход соединен с выходом первого делителя 53. Выход пятого делителя 93 соединен с первым входом двенадцатого блока 96 умножения, второй вход которого соединен с выходом шестого делителя 97, который также соединен с входом десятого функционального преобразователя 98. Выход первого порогового элемента 49 соединен с первым входом тринадцатого блока 99 умножения, второй вход которого соединен с выходом второго порогового элемента 51, третий вход соединен с выходом третьего порогового элемента 52, а выход соединен с первым входом четырнадцатого блока 100 умножения, второй вход которого соединен с выходом первого делителя 53, а выход соединен с третьим отрицательным входом десятого сумматора 101, второй положительный вход которого соединен с выходом второго сумматора 45. Первый отрицательный вход десятого сумматора 101 соединен с выходом первого квадратора 40, а выход десятого сумматора 101 соединен со вторым входом седьмого делителя 102, первый вход которого соединен с выходом пятнадцатого блока 103 умножения, первый вход которого соединен с выходом девятого сумматора 94, а второй вход соединен с выходом третьего порогового элемента 52. Выход седьмого делителя 102 соединен с первым входом шестнадцатого блока 104 умножения, второй вход которого соединен с выходом восьмого делителя 105, первый вход которого соединен с выходом семнадцатого блока 106 умножения, первый вход которого соединен с выходом восемнадцатого блока 107 умножения, первый вход которого соединен с выходом второго делителя 56, а второй вход соединен с выходом второго синусного функционального преобразователя 73. Второй вход семнадцатого блока 106 умножения соединен с выходом первого порогового элемента 49. Второй вход восьмого делителя 105 соединен с выходом одиннадцатого сумматора 108, первый отрицательный вход которого соединен с выходом второго порогового элемента 51, а второй положительный вход соединен с выходом девятнадцатого блока 109 умножения, первый вход которого соединен с выходом первого порогового элемента 49, а второй вход соединен с выходом третьего делителя 69. Выход тринадцатого блока 99 умножения также соединен с первым входом двадцатого блока 110 умножения, второй вход которого соединен с выходом третьего делителя 69, а выход соединен с третьим отрицательным входом двенадцатого сумматора 111, второй вход которого соединен с выходом второго сумматора 45. Первый отрицательный вход двенадцатого сумматора 111 соединен с выходом шестого квадратора 65, а выход двенадцатого сумматора 111 соединен со вторым входом девятого делителя 112, первый вход которого соединен с выходом двадцать первого блока 113 умножения, первый вход которого соединен с выходом третьего порогового элемента 52, второй вход соединен с выходом семнадцатого блока 106 умножения, а выход девятого делителя 112 соединен со вторым входом двадцать второго блока 114 умножения, первый вход которого соединен с выходом десятого делителя 115, первый вход которого соединен с входом девятого сумматора 94. Второй вход десятого делителя 115 соединен с выходом двадцать третьего блока 116 умножения, первый вход которого соединен с выходом первого порогового элемента 49, а второй вход соединен с выходом тринадцатого сумматора 117, первый вход которого соединен с выходом двадцать четвертого блока 118 умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя 72, а второй вход соединен с выходом двадцать пятого блока 119 умножения, второй вход которого соединен с выходом четвертого делителя 84. Первый вход двадцать пятого блока 119 умножения соединен с выходом первого косинусного функционального преобразователя 57. Второй вход тринадцатого сумматора 117 соединен с выходом двадцать шестого блока 120 умножения, первый вход которого соединен с выходом второго синусного функционального преобразователя 73, а второй вход соединен с выходом второго косинусного функционального преобразователя 88. Выход двадцать шестого блока 120 умножения также соединен со вторым входом двадцать седьмого блока 121 умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя 72, а выход двадцать седьмого блока 121 умножения соединен с первым входом четырнадцатого сумматора 122, второй вход которого соединен с выходом двадцать пятого блока 119 умножения. Выход четырнадцатого сумматора 122 соединен со вторым входом одиннадцатого делителя 123, первый вход которого соединен с выходом восемнадцатого блока 107 умножения. Выход одиннадцатого делителя 123 соединен с первым входом пятнадцатого сумматора 124, второй вход которого соединен с выходом пятого делителя 93, а выход соединен с входом двенадцатого квадратора 125. выход которого соединен с третьим входом шестнадцатого сумматора 126. первый вход которого соединен с третьим выходом тринадцатого квадратора 127, вход которого соединен с выходом семнадцатого сумматора 128, первый отрицательный вход которого соединен с выходом двадцать восьмого блока 129 умножения, первый вход которого соединен с выходом десятого делителя 115, а второй вход соединен с выходом одиннадцатого делителя 123. Выход пятнадцатого сумматора 124 также соединен с третьим входом двадцать девятого блока 130 умножения, первый вход которого соединен с выходом восемнадцатого сумматора 131, первый отрицательный вход которого соединен с выходом седьмого делителя 102. Второй отрицательный вход восемнадцатого сумматора 131 соединен с выходом девятого делителя 112. Второй вход двадцать девятого блока 130 умножения соединен с выходом третьего порогового элемента 52. Выход восемнадцатого сумматора 131 соединен с входом четырнадцатого квадратора 132, выход которого соединен с третьим входом девятнадцатого сумматора 133, второй вход которого соединен с выходом пятнадцатого квадратора 134, вход которого соединен с выходом двадцатого сумматора 135, первый отрицательный вход которого соединен с выходом двадцать второго блока 114 умножения, второй вход соединен с выходом шестнадцатого блока 104 умножения, а выход также соединен с третьим входом тридцатого блока 136 умножения, первый вход которого соединен с выходом третьего порогового элемента 52, а второй вход соединен с выходом семнадцатого сумматора 128, второй вход которого соединен с выходом тридцать первого блока 137 умножения, первый вход которого соединен с выходом восьмого делителя 105. Второй вход тридцать первого блока 137 умножения соединен с выходом пятого делителя 93. Выход тридцатого блока 136 умножения соединен с первым входом двадцать первого сумматора 138, второй отрицательный вход которого соединен с выходом двадцать девятого блока 130 умножения, а выход соединен с первым отрицательным входом двадцать второго сумматора 139, второй вход которого соединен с выходом второго блока 140 извлечения корня квадратного, вход которого соединен с выходом двадцать третьего сумматора 141, первый вход которого соединен с выходом шестнадцатого квадратора 142, вход которого соединен с выходом двадцатого первого сумматора 138. Второй отрицательный вход двадцать третьего сумматора 141 соединен с выходом тридцать второго блока 143 умножения, третий вход которого соединен с выходом девятнадцатого сумматора 133, первый отрицательный вход которого соединен с выходом тридцать третьего блока 144 умножения, первый вход которого соединен с выходом третьего квадратора 46, а второй вход соединен с выходом семнадцатого квадратора 145, вход которого соединен с выходом двадцать четвертого сумматора 146, первый вход которого соединен с выходом десятого делителя 115, а второй вход соединен с выходом восьмого делителя 105. Выход семнадцатого квадратора 145 также соединен со вторым входом шестнадцатого сумматора 126, выход которого соединен с первым входом тридцать второго блока 143 умножения, второй вход которого соединен с выходом четвертого порогового элемента 55. Также выход пятнадцатого сумматора 124 соединен с первым входом тридцать четвертого блока 147 умножения, второй вход которого соединен с выходом шестого делителя 97, а выход соединен со вторым отрицательным входом двадцать пятого сумматора 148, первый вход которого соединен с выходом восемнадцатого сумматора 131, а выход соединен с первым входом двенадцатого делителя 149, второй вход которого соединен с выходом двадцать четвертого сумматора 146. Выход двенадцатого делителя 149, соединен с входом одиннадцатого функционального преобразователя 150, а также соединен со вторым входом тридцать пятого блока 151 умножения, первый вход которого соединен с выходом десятого делителя 115. Выход тридцать пятого блока 151 умножения соединен со вторым отрицательным входом двадцать шестого сумматора 152, третий отрицательный вход которого соединен с выходом седьмого делителя 102. Первый отрицательный вход двадцать шестого сумматора 152 соединен с выходом двенадцатого блока 96 умножения, а выход соединен с входом двенадцатого функционального преобразователя 153. Выход шестнадцатого сумматора 126 соединен со вторым входом тридцать шестого блока 154 умножения, первый вход которого соединен с выходом третьего порогового элемента 52, а выход соединен с первым входом шестого делителя 97, второй вход которого соединен с выходом двадцать второго сумматора 139. Ось 14 симметрии совпадает с осью х неподвижной системы координат (СК), связанной с неподвижным основанием 3. Ось 15 симметрии совпадает с осью у неподвижной СК, связанной с неподвижным основанием 3. Ось симметрии неподвижной СК z расположена перпендикулярно к плоскости, образованной пересечением ортогональных осей 14 и 15 симметрии и проходит через точку 16 их пересечения, совпадающую с центром неподвижного основания 3. Оси х, у и z образуют при этом правую тройку векторов. Ось 33 симметрии совпадает с осью u подвижной СК, связанной с подвижной платформой 1. Ось 34 симметрии совпадает с осью v подвижной СК. Ось симметрии w подвижной СК расположена перпендикулярно к плоскости, образованной пересечением ортогональных осей 33 и 34 симметрии, и проходит через точку 32 их пересечения, совпадающую с центром 31 подвижной платформы 1. Оси u, v и w образуют при этом правую тройку векторов.
Устройство работает следующим образом. При смещении подвижной рукоятки 2 человеком-оператором, жестко связанная с ней подвижная платформа 1 также производит движение по одному из следующих шести возможных направлений (или в их сочетании), являющихся обобщенными координатами подвижной платформы 1: движение центра 31 подвижной платформы 1 вдоль оси x, движение центра 31 подвижной платформы 1 вдоль оси y, движение центра 31 подвижной платформы 1 вдоль оси z, вращение подвижной платформы 1 относительно оси 33 (u) симметрии на угол ϕ, вращение подвижной платформы 1 относительно оси 34 (v) симметрии на угол θ и вращение подвижной платформы 1 относительно оси симметрии w на угол ψ. При этом происходит перемещение звеньев 11 на величину, измеряемую с помощью установленных первого, второго, третьего и четвертого датчиков 7÷10 измерения линейного перемещения. Датчиком 37 измерения линейного перемещения производят измерение приращения радиус-вектора Р, направленного из центра неподвижного основания 3, совпадающего с точкой 16 пересечения ортогональных осей 14 и 15 симметрии в центр 31 подвижной платформы 1. Также происходит вращение промежуточного звена 22 на угол ψ, измерение которого осуществляют датчиком 36 измерения вращения. Определение обобщенных координат x, y, z, ϕ, θ и ψ подвижной платформы 1 производят с помощью входящих в состав задающего устройства элементов 39-154, которые следующим образом взаимодействуют между собой. На первый, седьмой, второй, восьмой, третий и четвертый функциональные преобразователи 39, 66, 43, 68, 47 и 58 поступают выходные сигналы первого, второго, третьего, четвертого и пятого датчиков 7÷10, 37 измерения линейного перемещения, а также датчика 36 измерения вращения, соответственно, численно равные U1÷U6. Преобразование сигналов, численно равных U1÷U6, в сигналы, численно равные l1, l2, l3, l4, P и ψ, производят в первом, седьмом, втором, восьмом, третьем и четвертом функциональных преобразователях 39, 66, 43, 68, 47 и 58 соответственно. Определение обобщенной координаты θ производят в соответствии со следующей формулой:

где множитель, численно равный sign(θ), определяют в соответствии со следующим правилом в пятом функциональном преобразователе 62:
где U - выходной сигнал релейного элемента 38.
Ux - величина, численно равная значению косинуса угла между осью 14 симметрии неподвижного основания 3 и осью 33 симметрии подвижной платформы 1, определение которой производят следующим образом:

где r - сигнал первого порогового элемента 49, численно равный радиусу расположения центов вторых сферических шарниров 12 на подвижной платформе 1 относительно ее центра 31;
R - сигнал второго порогового элемента 51, численно равный радиусу расположения центров сферических шарниров 4 на неподвижном основании 3 относительно его центра 16;
Возведение в квадрат выходного сигнала первого функционального преобразователя 39, численно равного l1, производят в первом квадраторе 40. Возведение в квадрат выходного сигнала второго функционального преобразователя 43, численно равного l3, производят во втором квадраторе 42. Возведение в квадрат выходного сигнала третьего функционального преобразователя 47, численно равного Р, производят в третьем квадраторе 46. Возведение в квадрат выходного сигнала первого порогового элемента 49, численно равного r, производят в четвертом квадраторе 48, возведение в квадрат выходного сигнала второго порогового элемента 51, численно равного R, производят в пятом квадраторе 50. Суммирование сигналов r2, R2 и Р2, являющихся выходными сигналами четвертого, пятого и третьего квадраторов 48, 50 и 46 соответственно, производят во втором сумматоре 45, выходной сигнал которого, численно равный (P2+r2+R2), умножают на выходной сигнал третьего порогового элемента 52 в первом блоке 44 умножения. Выходной сигнал первого блока 44 умножения, численно равный 2(Р2+r2+R2), суммируют в первом сумматоре 41 с выходными сигналами первого и второго квадраторов 40 и 42 соответсвенно. Выходной сигнал первого сумматора 41, численно равный (-l1 2-l3 2+2(P2+r2+R2)), делят в первом делителе 53 на выходной сигнал, численно равный 4Rr, второго блока 54 умножения, в котором происходит перемножение выходных сигналов первого, второго и четвертого пороговых элементов 49, 51 и 55 соответственно. Выходной сигнал первого делителя 53 делят во втором делителе 56 на выходной сигнал первого косинусного преобразователя 57, численно равный cosψ, на вход которого поступает выходной сигнал четвертого функционального преобразователя 58, численно равный ψ. Выходной сигнал со второго делителя 56, численно равный cosθ, поступает на арксинусный функциональный преобразователь 59, выходной сигнал которого поступает на блок 60 определения модуля, выходной сигнал которого в третьем блоке 61 умножают на выходной сигнал пятого функционального преобразователя 62, на вход которого поступает сигнал релейного элемента 38, численно равный U. Определение обобщенной координаты θ производят путем преобразования выходного сигнала третьего блока 61 умножения в шестом функциональном преобразователе 63. Обобщенную координату ϕ определяют в соответствии со следующей зависимостью:

где

где

Сигнал, численно равный Vy, образуют в третьем делителе 69 путем деления выходного сигнала третьего сумматора 64, численно равного (-l2 2-l4 2+2(P2+r2+R2)), на выходной сигнал второго блока 54 умножения, численно равного 4Rr. Формирование сигнала, численно равного (-l2 2-l4 2+2(P2+r2+R2)), производят в третьем сумматоре 64 путем суммирования выходного сигнала шестого квадратора 65, численно равного l2 2, выходного сигнала седьмого квадратора 67, численно равного l4 2, и выходного сигнала первого блока 44 умножения, численно равного 2(P2+r2+R2). Формирование сигнала, численно равного l2 2, происходит в шестом квадраторе 65, на вход которого поступает сигнал с седьмого функционального преобразователя 66. Формирование сигнала, численно равного l4 2, происходит в седьмом квадраторе 67, на вход которого поступает сигнал с восьмого функционального преобразователя 68. Сигнал, численно равный с, образуют в шестом сумматоре 80 путем суммирования входящих сигналов, поступающих с десятого и одиннадцатого квадраторов 79 и 81 соответственно. Выходной сигнал десятого квадратора 79, численно равный cos2ψ образуют путем возведения в квадрат в десятом квадраторе 79 выходного сигнала первого косинусного преобразователя 57, численно равного cosψ. Выходной сигнал одиннадцатого квадратора 81, численно равный sin2θ·sin2ψ, образуют путем возведения в квадрат выходного сигнала пятого блока 71 умножения, численно равного sinθ·sinψ. Сигнал, численно равный sinθ·sinψ, образуют путем перемножения в пятом блоке 71 умножения выходного сигнала первого и выходного сигнала второго синусных преобразователей 72 и 73 соответственно. Сигналы, численно равные sinθ и sinψ образуют в первом и втором синусных преобразователях 72 и 73 соответственно, на вход которых поступают сигналы с третьего блока 61 умножения и четвертого функционального преобразователя 58 соответственно. Сигнал, численно равный d образуют в четвертом блоке 70 умножения путем перемножения выходного сигнала третьего порогового элемента 52, выходного сигнала третьего делителя 69 и выходного сигнала пятого блока 71 умножения соответственно. Сигнал, численно равный е, образуют в пятом сумматоре 77 путем суммирования входного сигнала десятого квадратора 79 и выходного сигнала девятого квадратора 78, в котором производят возведение в квадрат выходного сигнала третьего делителя 69. Определение значения обобщенной координаты ϕ производят в арксинусном функциональном преобразователе 86, на вход которого поступает сигнал с четвертого делителя 84, в котором производят деление выходного сигнала седьмого сумматора 83 на выходной сигнал седьмого блока 85 умножения. Выходной сигнал седьмого сумматора 83 образуют путем суммирования выходного сигнала четвертого блока 70 умножения с выходным сигналом первого блока 82 извлечения корня квадратного, на вход которого поступает выходной сигнал четвертого сумматора 75. Выходной сигнал четвертого сумматора 75 образуют путем суммирования в последнем выходного сигнала восьмого квадратора 74, в котором производят возведение в квадрат выходного сигнала четвертого блока 70 умножения, численно равного d, и выходного сигнала шестого блока 76 умножения. Выходной сигнал шестого блока 76 умножения образуют путем перемножения в последнем выходного сигнала четвертого порогового элемента 55, выходного сигнала пятого сумматора 77 и выходного сигнала шестого сумматора 80. Формирование выходного сигнала седьмого блока 85 умножения производят путем перемножения в последнем выходного сигнала третьего порогового элемента 52, численно равного двум, и выходного сигнала шестого сумматора 80, численно равного с. Преобразования сигналов датчиков 7÷10, 37 измерения линейного перемещения и датчика 36 измерения вращения с целью определения обобщенных координат х, y и z производят в соответствии со следующими зависимостями:

где 


Формирование сигнала, численно равного Uy, производят в тринадцатом сумматоре 117 в котором складывают выходной сигнал двадцать четвертого блока 118 умножения и выходной сигнал двадцать шестого блока 120 умножения. В двадцать четвертом блоке 118 умножения производят перемножение выходного сигнала первого синусного преобразователя 72 на выходной сигнал двадцать пятого блока 119 умножения, в котором производят перемножение выходного сигнала четвертого делителя 84 на выходной сигнал первого косинусного преобразователя 57. В двадцать шестом блоке 120 умножения производят перемножение выходного сигнала второго синусного преобразователя 73 на выходной сигнал второго косинусного преобразователя 88, на вход которого поступает выходной сигал арксинусного функционального преобразователя 86. Выходной сигнал арксинусного функционального преобразователя 86 также поступает на девятый функциональный преобразователь 87. Формирование сигнала, численно равного Uz, производят в восьмом сумматоре 90, в котором производят суммирование выходного сигнала восьмого блока 89 умножения и выходного сигнала девятого блока 91 умножения. Выходной сигнал девятого блока 91 умножения образуют путем перемножения в последнем выходного сигнала первого синусного преобразователя 72 на выходной сигнал первого косинусного преобразователя 57. Выходной сигнал девятого блока 91 умножения получают путем перемножения в последнем выходного сигнала второго синусного преобразователя 73 на выходной сигнал четвертого делителя 84. Формирование сигнала, численно равного отрицательному значению величины Vx, производят в восемнадцатом блоке 107 умножения, в котором производят перемножение выходного сигнала второго делителя 56 на выходной сигнал второго синусного преобразователя 73. Формирование сигнала, численно равного Vz, производят в четырнадцатом сумматоре 122, в котором производят суммирование выходного сигнала двадцать пятого блока 119 умножения и выходного сигнала двадцать седьмого блока 121 умножения, в котором производят перемножение выходного сигнала двадцать шестого блока 120 умножения на выходной сигнал первого синусного преобразователя 72. Формирование сигнала, численно равного А, производят в десятом делителе 115, в котором производят деление выходного сигнала двадцать третьего блока 116 умножения на выходной сигнал девятого сумматора 94. Выходной сигнал девятого сумматора 94 образуют путем суммирования в последнем выходного сигнала второго порогового элемента 51 и выходного сигнала одиннадцатого блока 95 умножения, в котором происходит умножение выходного сигнала первого порогового элемента 49 на выходной сигнал первого делителя 53. Формирование сигнала, численно равного В, происходит в пятом делителе 93 путем деления в последнем выходного сигнала десятого блока 92 умножения, в котором происходит перемножение выходного сигнала восьмого сумматора 90 на выходной сигнал первого порогового элемента 49, на выходной сигнал девятого сумматора 94. Формирование выходного сигнала, численно равного С, производят в седьмом делителе 102, в котором происходит деление выходного сигнала десятого сумматора 101 на выходной сигал пятнадцатого блока 103 умножения, в котором происходит перемножение выходного сигнала девятого сумматора 94 на выходной сигнал третьего порогового элемента 52. Выходной сигнал десятого сумматора 101 образуют в последнем путем суммирования поступающих на него выходного сигнала первого квадратора 40, выходного сигнала второго сумматора 45 и выходного сигнала четырнадцатого блока 100 умножения. Выходной сигнал четырнадцатого блока 100 умножения образуют в последнем путем умножения поступающего на него выходного сигнала первого делителя 53 на выходной сигнал тринадцатого блока 99 умножения, на вход которого поступают выходной сигнал первого порогового элемента 49, выходной сигнал второго порогового элемента 51 и выходной сигнал третьего порогового элемента 52. Формирование выходного сигнала, численно равного отрицательному значению D, производят в восьмом делителе 105 путем деления в последнем выходного сигнала одиннадцатого сумматора 108 на выходной сигнал семнадцатого блока 106 умножения, выходной сигнал которого образуют путем умножения в последнем выходного сигнала восемнадцатого блока 107 умножения на выходной сигнал первого порогового элемента 49. Выходной сигнал одиннадцатого сумматора 108 образуют при суммировании в последнем выходного сигнала второго порогового элемента 51 и выходного сигнала девятнадцатого блока 109 умножения, в котором происходит умножение выходного сигнала третьего делителя 69 на выходной сигнал первого порогового элемента 49. Формирование сигнала, численно равного отрицательному значению Е, производят в одиннадцатом делителе 123 в котором происходит деление выходного сигнала четырнадцатого сумматора 122 на выходной сигнал восемнадцатого блока 107 умножения. Формирование сигнала, численно равного отрицательному значению величины F, производят в девятом делителе 112, в котором происходит деление выходного сигнала двенадцатого сумматора 111 на выходной сигнал двадцать первого блока 113 умножения, в котором происходит перемножение выходного сигнала третьего порогового элемента 52 на выходной сигнал семнадцатого блока 106 умножения. Формирование выходного сигнала двенадцатого сумматора 111 происходит путем суммирования в последнем выходного сигнала шестого квадратора 65, выходного сигнала второго сумматора 45 и выходного сигнала двадцатого блока 110 умножения, в котором происходит умножение выходного сигнала третьего делителя 69 на выходной сигнал тринадцатого блока 99 умножения. Формирование сигнала, численно равного q, происходит с шестнадцатом сумматоре 126, на входы которого поступают выходной сигнал тринадцатого квадратора 127, выходной сигнал двенадцатого квадратора 125 и выходной сигнал семнадцатого квадратора 145. На вход тринадцатого квадратора 127 поступает выходной сигнал семнадцатого сумматора 128, в котором происходит суммирование выходного сигнала двадцать восьмого блока 129 умножения и выходного сигнала тридцать первого блока 137 умножения. Выходной сигнал двадцать восьмого блока 129 умножения формируют путем перемножения в последнем выходного сигнала десятого делителя 115 на выходной сигнал одиннадцатого делителя 123. Выходной сигнал тридцать первого блока 137 умножения формируют путем перемножения в последнем выходного сигнала восьмого делителя 105 на выходной сигнал пятого делителя 93. Выходной сигнал семнадцатого квадратора 145 формируют путем возведения в квадрат в последнем выходного сигнала двадцать четвертого сумматора 146, на вход которого поступают сигнал десятого делителя 115 и сигнал восьмого делителя 105. Выходной сигнал двенадцатого квадратора 125 формируют путем возведения в квадрат в последнем выходного сигнала пятнадцатого сумматора 124, на вход которого поступает выходной сигнал пятого делителя 93 и выходной сигнал одиннадцатого делителя 123. Формирование сигнала, численно равного s, производят в двадцать первом сумматоре 138, на вход которого поступают выходной сигнал двадцать девятого блока 130 умножения и выходной сигнал тридцатого блока 136 умножения. Выходной сигнал двадцать девятого блока 130 умножения формируют в последнем путем перемножения выходного сигнала пятнадцатого сумматора 124, выходного сигнала третьего порогового элемента 52 и выходного сигнала восемнадцатого сумматора 131, на входы которого поступают выходные сигналы седьмого делителя 102 и девятого делителя 112. Выходной сигнал тридцатого блока 136 умножения формируют путем перемножения в последнем выходного сигнала третьего порогового элемента 52, выходного сигнала семнадцатого сумматора 128 и выходного сигнала двадцатого сумматора 135, на вход которого поступают выходные сигналы двадцать второго блока 114 умножения, на входы которого поступают выходные сигналы десятого делителя 115, девятого делителя 112 и шестнадцатого блока 104 умножения. На входы шестнадцатого блока 104 умножения поступают выходной сигнал восьмого делителя 105 и выходной сигнал седьмого делителя 102. Формирование выходного сигнала, численно равного t, производят в девятнадцатом сумматоре 133, на вход которого поступают выходной сигнал тридцать третьего блока 144 умножения, пятнадцатого квадратора 134, на вход которого поступает выходной сигнал двадцатого сумматора 135, и четырнадцатого квадратора 132, на вход которого поступает выходной сигнал восемнадцатого сумматора 131. Выходной сигнал тридцать третьего блока 144 умножения формируют в последнем путем перемножения выходного сигнала семнадцатого квадратора 145 и третьего квадратора 46. Формирование сигнала, численно равного z, производят в шестом делителе 97, на вход которого поступает выходной сигнал тридцать шестого блока 154 умножения, на вход которого поступает выходной сигнал шестнадцатого сумматора 126 и выходной сигнал третьего порогового элемента 52, и выходной сигнал двадцать второго сумматора 139, на вход которого поступают выходной сигнал двадцать первого сумматора 138 и выходной сигнал второго блока 140 извлечения корня квадратного, на вход которого поступает выходной сигнал двадцать третьего сумматора 141. Формирование выходного сигнала двадцать третьего сумматора 141 производят путем суммирования в последнем выходного сигнала шестнадцатого квадратора 142, на вход которого подают выходной сигнал двадцать первого сумматора 138 и выходной сигнал тридцать второго блока 143 умножения, на вход которого подают выходной сигнал шестнадцатого сумматора 126, выходной сигнал четвертого порогового элемента 55 и выходной сигнал девятнадцатого сумматора 133. Выходной сигнал шестого делителя 97 также поступает на вход десятого функционального преобразователя 98. Формирование выходного сигнала, численно равного у, формируют в двенадцатом делителе 149, в котором происходит деление выходного сигнала двадцать пятого сумматора 148, на вход которого поступают выходной сигнал восемнадцатого сумматора 131 и выходной сигнал тридцать четвертого блока 147 умножения, на вход которого поступает выходной сигнал пятнадцатого сумматора 124 и выходной сигнал шестого делителя 97, на выходной сигнал двадцать четвертого сумматора 146. Причем выходной сигнал двенадцатого делителя 149 поступает на вход одиннадцатого функционального преобразователя 150. Формирование выходного сигнала, численно равного х, производят в двадцать шестом сумматоре 152 на вход которого поступают выходной сигнал тридцать пятого блока 151 умножения, выходной сигнал двенадцатого блока 96 умножения и выходной сигнала седьмого делителя 102. Причем на вход тридцать пятого блока 151 умножения поступают выходной сигнал двенадцатого делителя 149 и выходной сигнал десятого делителя 115, а на вход двенадцатого блока 96 умножения поступает сигнал шестого делителя 97 и выходной сигнал пятого делителя 93. Выходной сигнал двадцать шестого сумматора 152 поступает на вход двенадцатого функционального преобразователя 153.
Таким образом, благодаря предложенному решению удается упростить конструкцию задающего устройства для дистанционного управления манипулятором. В результате чего достигается формирование пространственного шестикомпонентного задающего вектора управления, упрощение конструкции задающего органа, включающей в свой состав механизм ПКС, повышение быстродействия при управлении подвижным объектом и обеспечивается технологичность изготовления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ | 2011 |
|
RU2466055C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725447C1 |
| Самонастраивающийся электропривод манипулятора | 2015 |
|
RU2608005C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2017 |
|
RU2688449C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2015 |
|
RU2593735C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2551044C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2017 |
|
RU2688448C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2489251C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725449C1 |
Изобретение относится к области управления манипуляторами. Технический результат - упрощение конструкции, повышение быстродействия и технологичности изготовления. Сущность: задающее устройство для дистанционного управления состоит из подвижной платформы, с установленной на ней подвижной рукояткой управления, неподвижного основания и пяти кинематических цепей, соединяющих их и содержащих призматические шарниры с установленными на них датчиками измерения линейного перемещения. Четыре кинематические цепи крепятся первыми четырьмя сферическими шарнирами к неподвижному основанию и четырьмя вторыми сферическими шарнирами к подвижной платформе. Причем центры первых сферических шарниров неподвижного основания расположены на ортогональных осях симметрии последнего с равным удалением от центра их пересечения, совпадающего с центром неподвижного основания, а центры вторых сферических шарниров, с помощью которых кинематические цепи крепятся к подвижной платформе, расположены на ортогональных осях симметрии последней с равным удалением от центра их пересечения, совпадающего с центром подвижной платформы. Точка пересечения ортогональных осей неподвижного основания совпадает с центром крестовины первого шарнира Гука, которым центральная кинематическая цепь крепится к неподвижному основанию, а точка пересечения ортогональных осей подвижной платформы совпадает с центром крестовины второго шарнира Гука, которым центральная кинематическая цепь крепится к подвижной платформе. В состав центральной цепи также входит датчик измерения вращения подвижной платформы относительно собственной оси, являющейся третьей осью правой декартовой системы координат, связанной с подвижной платформой, первыми двумя осями которой являются ортогональные оси симметрии с расположенными на них вторыми сферическими шарнирами. В состав полезной модели также входят совокупность стандартных элементов, определенным образом связанных между собой, позволяющая производить обработку сигналов датчиков измерения линейного перемещения и датчика измерения вращения в обобщенные координаты подвижной платформы. 2 ил.
Задающее устройство для дистанционного управления манипулятором, содержащее подвижную платформу с установленной на ней рукояткой управления, неподвижное основание, на котором установлены первые сферические шарниры, соединенные каждый с соответствующей стойкой с расположенными на ней призматическими шарнирами, на которых расположены первый, второй, третий и четвертый датчики измерения линейного перемещения каждого выходного звена, каждое из которых соединено с помощью второго сферического шарнира с подвижной платформой, отличающееся тем, что центры первых четырех сферических шарниров установлены на ортогональных осях симметрии неподвижного основания и равноудалены от точки пересечения ортогональных осей симметрии неподвижного основания, совпадающего с центром крестовины первого шарнира Гука, первое звено которого неподвижно закреплено на неподвижном основании, шарнирно соединено с помощью крестовины со вторым звеном первого шарнира Гука, которое шарнирно соосно соединено с промежуточным звеном, снабженным фиксатором ограничения перемещения вдоль оси промежуточного звена и соединенным с помощью призматического шарнира с выходным звеном, соединенным с первым звеном второго шарнира Гука, центр крестовины которого совпадает с центром подвижной платформы и с точкой пересечения ортогональных осей симметрии подвижной платформы, на которой закреплено второе звено второго шарнира Гука, а вторые четыре сферических шарнира установлены на ортогональных осях симметрии подвижной платформы с равным удалением от ее центра, при этом в исходном состоянии положение крестовин неподвижного основания и подвижной платформы совпадает с расположением ортогональных осей симметрии неподвижного основания и ортогональных осей симметрии подвижной платформы, а на втором звене первого шарнира Гука установлен датчик измерения вращения промежуточного звена, пятый датчик измерения линейного перемещения выходного звена вдоль оси промежуточного звена установлен на призматическом шарнире, второе звено второго шарнира Гука снабжено релейным элементом, причем выход первого датчика измерения линейного перемещения соединен с входом первого функционального преобразователя, выход которого соединен с входом первого квадратора, выход которого соединен с первым отрицательным входом первого сумматора, второй отрицательный вход которого соединен с выходом второго квадратора, вход которого соединен с выходом второго функционального преобразователя, вход которого соединен с выходом третьего датчика измерения линейного перемещения, а третий положительный вход первого сумматора соединен с выходом первого блока умножения, первый вход которого соединен с выходом второго сумматора, первый вход которого соединен с выходом третьего квадратора, вход которого соединен с выходом третьего преобразователя, вход которого соединен с выходом пятого датчика измерения линейного перемещения, второй вход второго сумматора соединен с выходом четвертого квадратора, вход которого соединен с выходом первого порогового элемента, третий вход второго сумматора соединен с выходом пятого квадратора, вход которого соединен с выходом второго порогового элемента, второй вход первого блока умножения соединен с выходом третьего порогового элемента, выход первого сумматора соединен с входом первого делителя, второй вход которого соединен с выходом второго блока умножения, первый вход которого соединен с выходом первого порогового элемента, второй вход соединен с выходом четвертого порогового элемента, а третий вход соединен с выходом второго порогового элемента, выход первого делителя соединен с первым входом второго делителя, второй вход которого соединен с выходом первого косинусного функционального преобразователя, вход которого соединен с выходом четвертого функционального преобразователя, вход которого соединен с выходом датчика измерения вращения, выход второго делителя соединен со входом арккосинусного функционального преобразователя, выход которого соединен со входом блока определения модуля, выход которого соединен со вторым входом третьего блока умножения, первый вход которого соединен с выходом пятого функционального преобразователя, вход которого соединен с выходом релейного элемента, выход третьего блока умножения соединен с входом шестого функционального преобразователя, выход первого блока умножения соединен также с первым положительным входом третьего сумматора, второй отрицательный вход которого соединен с выходом шестого квадратора, вход которого соединен с выходом седьмого функционального преобразователя, вход которого соединен с выходом второго датчика измерения линейного перемещения, третий отрицательный вход сумматора соединен с выходом седьмого квадратора, вход которого соединен с выходом восьмого функционального преобразователя, вход которого соединен с выходом четвертого датчика измерения линейного перемещения, а выход третьего сумматора соединен со вторым входом третьего делителя, первый вход которого соединен с выходом второго блока умножения, а выход соединен со вторым входом четвертого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, а третий вход соединен с выходом пятого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, вход которого соединен с выходом третьего блока умножения, а второй вход пятого блока умножения соединен с выходом второго синусного функционального преобразователя, вход которого соединен с выходом четвертого функционального преобразователя, выход четвертого блока умножения соединен с входом восьмого квадратора, выход которого соединен с первым входом четвертого сумматора, второй отрицательный вход которого соединен с выходом шестого блока умножения, первый вход которого соединен с выходом четвертого порогового элемента, а второй вход соединен с выходом пятого сумматора, первый положительный вход которого соединен с выходом девятого квадратора, вход которого соединен с выходом третьего делителя, второй отрицательный вход пятого сумматора соединен с выходом десятого квадратора, вход которого соединен с выходом первого косинусного функционального преобразователя, третий вход шестого блока умножения соединен с выходом шестого сумматора, первый вход которого соединен с выходом одиннадцатого квадратора, вход которого соединен с выходом пятого блока умножения, а второй вход шестого сумматора соединен с выходом десятого квадратора, выход четвертого сумматора соединен с входом первого блока извлечения корня квадратного, выход которого соединен со вторым входом седьмого сумматора, первый отрицательный вход которого соединен с выходом четвертого блока умножения, а выход седьмого сумматора соединен с первым входом четвертого делителя, второй вход которого соединен с выходом седьмого блока умножения, первый вход которого соединен с выходом шестого сумматора, а второй вход соединен с выходом третьего порогового элемента, выход четвертого делителя соединен с входом арксинусного функционального преобразователя, выход которого соединен с входом девятого функционального преобразователя, а также с входом второго косинусного функционального преобразователя, выход которого соединен со вторым входом восьмого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, третий вход соединен с выходом первого косинусного функционального преобразователя, а выход соединен со вторым отрицательным входом восьмого сумматора, первый положительный вход которого соединен с выходом девятого блока умножения, первый вход которого соединен с выходом второго синусного функционального преобразователя, а второй вход соединен с выходом четвертого делителя, выход восьмого сумматора соединен со вторым входом десятого блока умножения, первый вход которого соединен с выходом первого порогового элемента, а выход соединен со вторым входом пятого делителя, первый вход которого соединен с выходом девятого сумматора, первый отрицательный вход которого соединен с выходом второго порогового элемента, а второй положительный вход соединен с выходом одиннадцатого блока умножения, первый вход которого соединен с выходом первого порогового элемента, а второй вход соединен с выходом первого делителя, выход пятого делителя соединен с первым входом двенадцатого блока умножения, второй вход которого соединен с выходом шестого делителя, который также соединен с входом десятого функционального преобразователя, выход первого порогового элемента соединен с первым входом тринадцатого блока умножения, второй вход которого соединен с выходом второго порогового элемента, третий вход соединен с выходом третьего порогового элемента, а выход соединен с первым входом четырнадцатого блока умножения, второй вход которого соединен с выходом первого делителя, а выход соединен с третьим отрицательным входом десятого сумматора, второй положительный вход которого соединен с выходом второго сумматора, первый отрицательный вход десятого сумматора соединен с выходом первого квадратора, а выход десятого сумматора соединен со вторым входом седьмого делителя, первый вход которого соединен с выходом пятнадцатого блока умножения, первый вход которого соединен с выходом девятого сумматора, а второй вход соединен с выходом третьего порогового элемента, выход седьмого делителя соединен с первым входом шестнадцатого блока умножения, второй вход которого соединен с выходом восьмого делителя, первый вход которого соединен с выходом семнадцатого блока умножения, первый вход которого соединен с выходом восемнадцатого блока умножения, первый вход которого соединен с выходом второго делителя, а второй вход соединен с выходом второго синусного функционального преобразователя, второй вход семнадцатого блока умножения соединен с выходом первого порогового элемента, второй вход восьмого делителя соединен с выходом одиннадцатого сумматора, первый отрицательный вход которого соединен с выходом второго порогового элемента, а второй положительный вход соединен с выходом девятнадцатого блока умножения, первый вход которого соединен с выходом первого порогового элемента, а второй вход соединен с выходом третьего делителя, выход тринадцатого блока умножения также соединен с первым входом двадцатого блока умножения, второй вход которого соединен с выходом третьего делителя, а выход соединен с третьим отрицательным входом двенадцатого сумматора, второй вход которого соединен с выходом второго сумматора, первый отрицательный вход двенадцатого сумматора соединен с выходом шестого квадратора, а выход двенадцатого сумматора соединен со вторым входом девятого делителя, первый вход которого соединен с выходом двадцать первого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, второй вход соединен с выходом семнадцатого блока умножения, а выход девятого делителя соединен со вторым входом двадцать второго блока умножения, первый вход которого соединен с выходом десятого делителя, первый вход которого соединен с входом девятого сумматора, второй вход десятого делителя соединен с выходом двадцать третьего блока умножения, первый вход которого соединен с выходом первого порогового элемента, а второй вход соединен с выходом тринадцатого сумматора, первый вход которого соединен с выходом двадцать четвертого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, а второй вход соединен с выходом двадцать пятого блока умножения, второй вход которого соединен с выходом четвертого делителя, первый вход двадцать пятого блока умножения соединен с выходом первого косинусного функционального преобразователя, второй вход тринадцатого сумматора соединен с выходом двадцать шестого блока умножения, первый вход которого соединен с выходом второго синусного функционального преобразователя, второй вход соединен с выходом второго косинусного функционального преобразователя, выход двадцать шестого блока умножения также соединен со вторым входом двадцать седьмого блока умножения, первый вход которого соединен с выходом первого синусного функционального преобразователя, а выход двадцать седьмого блока умножения соединен с первым входом четырнадцатого сумматора, второй вход которого соединен с выходом двадцать пятого блока умножения, выход четырнадцатого сумматора соединен со вторым входом одиннадцатого делителя, первый вход которого соединен с выходом восемнадцатого блока умножения, выход одиннадцатого делителя соединен с первым входом пятнадцатого сумматора, второй вход которого соединен с выходом пятого делителя, а выход соединен с входом двенадцатого квадратора, выход которого соединен с третьим входом шестнадцатого сумматора, первый вход которого соединен с выходом тринадцатого квадратора, вход которого соединен с выходом семнадцатого сумматора, первый отрицательный вход которого соединен с выходом двадцать восьмого блока умножения, первый вход которого соединен с выходом десятого делителя, а второй вход соединен с выходом одиннадцатого делителя, выход пятнадцатого сумматора также соединен с третьим входом двадцать девятого блока умножения, первый вход которого соединен с выходом восемнадцатого сумматора, первый отрицательный вход которого соединен с выходом седьмого делителя, второй отрицательный вход восемнадцатого сумматора соединен с выходом девятого делителя, второй вход двадцать девятого блока умножения соединен с выходом третьего порогового элемента, выход восемнадцатого сумматора также соединен с входом четырнадцатого квадратора, выход которого соединен с третьим входом девятнадцатого сумматора, второй вход которого соединен с выходом пятнадцатого квадратора, вход которого соединен с выходом двадцатого сумматора, первый отрицательный вход которого соединен с выходом двадцать второго блока умножения, второй вход соединен с выходом шестнадцатого блока умножения, а выход также соединен с третьим входом тридцатого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, а второй вход соединен с выходом семнадцатого сумматора, второй вход которого соединен с выходом тридцать первого блока умножения, первый вход которого соединен с выходом восьмого делителя, второй вход тридцать первого блока умножения соединен с выходом пятого делителя, выход тридцатого блока умножения соединен с первым входом двадцать первого сумматора, второй отрицательный вход которого соединен с выходом двадцать девятого блока умножения, а выход соединен с первым отрицательным входом двадцать второго сумматора, второй вход которого соединен с выходом второго блока извлечения корня квадратного, вход которого соединен с выходом двадцать третьего сумматора, первый вход которого соединен с выходом шестнадцатого квадратора, вход которого соединен с выходом двадцать первого сумматора, второй отрицательный вход двадцать третьего сумматора соединен с выходом тридцать второго блока умножения, третий вход которого соединен с выходом девятнадцатого сумматора, первый отрицательный вход которого соединен с выходом тридцать третьего блока умножения, первый вход которого соединен с выходом третьего квадратора, а второй вход соединен с выходом семнадцатого квадратора, вход которого соединен с выходом двадцать четвертого сумматора, первый вход которого соединен с выходом десятого делителя, а второй вход соединен с выходом восьмого делителя, выход семнадцатого квадратора также соединен со вторым входом шестнадцатого сумматора, выход которого соединен с первым входом тридцать второго блока умножения, второй вход которого соединен с выходом четвертого порогового элемента; также выход пятнадцатого сумматора соединен с первым входом тридцать четвертого блока умножения, второй вход которого соединен с выходом шестого делителя, а выход соединен со вторым отрицательным входом двадцать пятого сумматора, первый вход которого соединен с выходом восемнадцатого сумматора, а выход соединен с первым входом двенадцатого делителя, второй вход которого соединен с выходом двадцать четвертого сумматора, а выход двенадцатого делителя соединен с входом одиннадцатого функционального преобразователя, а также соединен со вторым входом тридцать пятого блока умножения, первый вход которого соединен с выходом десятого делителя, а выход тридцать пятого блока умножения соединен со вторым отрицательным входом двадцать шестого сумматора, третий отрицательный вход которого соединен с выходом седьмого делителя, первый отрицательный вход двадцать шестого сумматора соединен с выходом двенадцатого блока умножения, а выход соединен с входом двенадцатого функционального преобразователя, выход шестнадцатого сумматора соединен со вторым входом тридцать шестого блока умножения, первый вход которого соединен с выходом третьего порогового элемента, а выход соединен с первым входом шестого делителя, второй вход которого соединен с выходом двадцать второго сумматора.
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| US 4216467 А, 05.08.1980 | |||
| ЗАДАЮЩЕЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 2002 |
|
RU2226149C2 |
| Задающее устройство для управления роботом-манипулятором | 1986 |
|
SU1348167A1 |

