[0001] Настоящая заявка испрашивает приоритет в отношении заявки на патент Китая № 200810009362.1, поданной 25 февраля 2008 года и озаглавленной «METHOD, SYSTEM, AND DEVICE FOR DETECTING BLIND AREA», полностью включенной в настоящий документ по ссылке.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к области техники связи, и, в частности, к способу, системе и устройству для обнаружения зоны отсутствия приема (слепой области).
УРОВЕНЬ ТЕХНИКИ
[0003] В течение эксплуатации сети часто возникают проблемы, такие как отказ аппаратного обеспечения базовой станции (BS) и прерывание передачи. Данные проблемы могут быть обнаружены через устройства поддержки работы сети, и решения могут быть найдены. Однако трудно обнаружить такие проблемы, как помехи восходящих/нисходящих каналов связи и необоснованное покрытие, которые не приводят к серьезным результатам при вычислении разъединений вызова, в то время как данные проблемы наиболее близко и наиболее непосредственно связаны с пользователем. Таким образом, точная оценка производится посредством анализа проблем, возникающих в процессе эксплуатации сети, в соответствии с собранными данными, а между тем, в соответствии с результатом теста, для улучшения или оптимизации предлагается корректирующее решение для проблем. В предшествующем уровне техники данная функция может быть выполнена через устройство измерения трассы.
[0004] Данное устройство измерения трассы представляет собой устройство программного/аппаратного обеспечения, произведенное исключительно для оптимизации сети и планирования работы, которое включает входное устройство сбора данных, систему глобального позиционирования (GPS) и выделенное тестовое программное обеспечение. Входное устройство сбора текущих данных представляет собой в основном тестовый мобильный телефон со специальным программным обеспечением внутри, который может выполнять некоторые специальные функции в зависимости от сети, такие как захват частоты, принудительная передача обслуживания, вывод на экран информации сети и определение слепой области сети; входное устройство сбора текущих данных может также выполнять некоторые функции независимо от сети, такие как всеволновая развертка по частоте и дополнительная развертка по частоте; и между тем может еще принимать, через кабель связи между компьютером и мобильным телефоном, инструкции, отправляемые компьютером, и передавать собранные данные на сохраняющий компьютер для их дальнейшей обработки компьютером.
[0005] Однако обнаружение слепой области посредством принятия способа измерения трассы нуждается в человеческом вмешательстве, расходы являются более дорогими и затраты высоки, что не соответствует требованиям оператора к сетевым расходам. Дополнительно, когда выполняется измерение трассы, обычно проблема разъединения вызова является довольно серьезной, и огромное влияние уже было оказано на пользователя, так что проблема покрытия не может быть решена своевременно. Более того, не все места являются подходящими для использования способа измерения трассы, так что способ измерения трассы ограничен некоторыми географическими ограничениями.
[0006] Для проблем, существующих в технике измерения трассы, в предшествующем уровне техники предлагается еще один другой способ обнаружения слепой области, при котором информация измерения передается посредством отчета мобильной станции (MS); или когда MS находится в активном состоянии, данной MS не нужно обеспечивать информацию измерения, в то время как сеть записывает местоположение MS и собирает информацию специального состояния. Данное специальное состояние включает информацию о том, что ячейка теряет покрытие, или ячейка повторно выбирается, или, в неактивном состоянии, инициируется услуга и обнаруживается, что покрытие потеряно.
[0007] В процессе осуществления настоящего изобретения, изобретатели обнаруживают, что предшествующий уровень техники имеет по меньшей мере следующие проблемы.
[0008] Хотя данное существующее техническое решение обеспечивает отчет по обнаружению области покрытия, передающая отчет ячейка, принимающая отчетную информацию, не принимает отчетную информацию выборочно. Существующее техническое решение не рассматривает обстоятельство загрузки передающей отчет ячейки в данное время или случай накопления, вытекающий из многократного приема передающей отчет ячейкой той же или схожей отчетной информации от различных терминалов, так что оказывается влияние на качество обслуживания других пользователей в передающей отчет ячейке. В более серьезной ситуации может быть вызвана поломка передающей отчет ячейки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Соответственно, настоящее изобретение относится к способу, системе и устройству для обнаружения зоны отсутствия приема, причем данная зона отсутствия приема позиционируется через функцию обнаружения терминала пользователя, и связанная с этим задача обнаружения зоны отсутствия приема выполняется способом отчета, так чтобы работа по обнаружению зоны отсутствия приема осуществлялась более эффективным и экономным способом. Более того, проблемы перегрузки можно избежать, как можно избежать и случая накопления от приема передающей отчет ячейкой той же или схожей отчетной информации от различных терминалов, путем отказа от отчета терминала пользователя через политику обнаружения зоны отсутствия приема.
[0010] В одном варианте осуществления, настоящее изобретение обеспечивает способ обнаружения зоны отсутствия приема, включающий следующие этапы.
[0011] В ситуации, когда терминал пользователя передвигается в зону отсутствия приема, данный терминал пользователя записывает информацию обнаружения.
[0012] Если терминал пользователя передвигается из зоны отсутствия приема, терминал пользователя получает информацию о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен.
[0013] Терминал пользователя передает в виде отчета полученную информацию о зоне отсутствия приема в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя с целью обеспечения устройству сетевой стороны возможности получения местоположения зоны отсутствия приема, после того как терминал пользователя подтвержден посредством устройства сетевой стороны.
[0014] В одном варианте осуществления, настоящее изобретение дополнительно обеспечивает систему для обнаружения зоны отсутствия приема, включающую терминал пользователя и устройство сетевой стороны.
[0015] Терминал пользователя сконфигурирован с возможностью записи информации обнаружения, если терминал пользователя передвигается в зону отсутствия приема; получения информации о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, если терминал пользователя передвигается из зоны отсутствия приема; и передачи в виде отчета полученной информации о зоне отсутствия приема в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя с целью обеспечения устройству сетевой стороны возможности получения местоположения зоны отсутствия приема, после того как терминал пользователя подтвержден посредством устройства сетевой стороны.
[0016] Устройство сетевой стороны сконфигурировано с возможностью выполнения вычисления зоны отсутствия приема и машинного вычисления местоположения в соответствии с информацией о зоне отсутствия приема, переданной в виде отчета терминалом пользователя с целью получения информации о местоположении зоны отсутствия приема.
[0017] В одном варианте осуществления, настоящее изобретение дополнительно обеспечивает терминал пользователя, включающий в себя блок получения и буферизации информации и блок передачи информации в виде отчета.
[0018] Блок получения информации и буферизации сконфигурирован с возможностью записи информации обнаружения, если терминал пользователя передвигается в зону отсутствия приема; и получения информации о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, если терминал пользователя передвигается из зоны отсутствия приема.
[0019] Блок передачи информации в виде отчета сконфигурирован с возможностью передачи в виде отчета информации о зоне отсутствия приема, полученной посредством блока получения и буферизации информации, в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя с целью обеспечения устройству сетевой стороны возможности получения местоположения зоны отсутствия приема, после того как терминал пользователя подтвержден посредством устройства сетевой стороны.
[0020] В одном варианте осуществления, настоящее изобретение дополнительно обеспечивает устройство сетевой стороны, включающее блок приема отчетной информации, блок машинного вычисления местоположения и блок оценки.
[0021] Блок приема отчетной информации сконфигурирован с возможностью приема информации о зоне отсутствия приема, передаваемой в виде отчета терминалом пользователя.
[0022] Блок машинного вычисления местоположения сконфигурирован с возможностью выполнения вычисления зоны отсутствия приема и машинного вычисления местоположения в соответствии с информацией о зоне отсутствия приема, принятой блоком приема отчетной информации с целью получения информации о местоположении зоны отсутствия приема.
[0023] Блок оценки сконфигурирован с возможностью оценки, требуется ли передача в виде отчета информации о зоне отсутствия приема, и, если передача в виде отчета информации о зоне отсутствия приема требуется, отправки сообщения запроса на передачу в виде отчета информации о зоне отсутствия приема в терминал пользователя, причем данное сообщение запроса сообщает информацию о местоположении ресурсов, назначенных терминалу пользователя для передачи информации о зоне отсутствия приема.
[0024] По сравнению с предшествующим уровнем техники, в вариантах осуществления настоящего изобретения, позиционирование местоположения зоны отсутствия приема осуществляется через обратную связь терминала пользователя, и для оператора сети обеспечивается информационная опора для последовательной организации BS, так чтобы сетевой оператор был освобожден от измерения трассы с целью обнаружения зоны отсутствия приема, затраты сетевого оператора экономятся, и общее сетевое покрытие гарантируется, и, более того, можно избежать проблемы перегрузки, как можно избежать и случая накопления от приема передающей отчет ячейкой той же или схожей отчетной информации от различных терминалов, путем отказа от отчета терминала пользователя посредством политики обнаружения зоны отсутствия приема.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
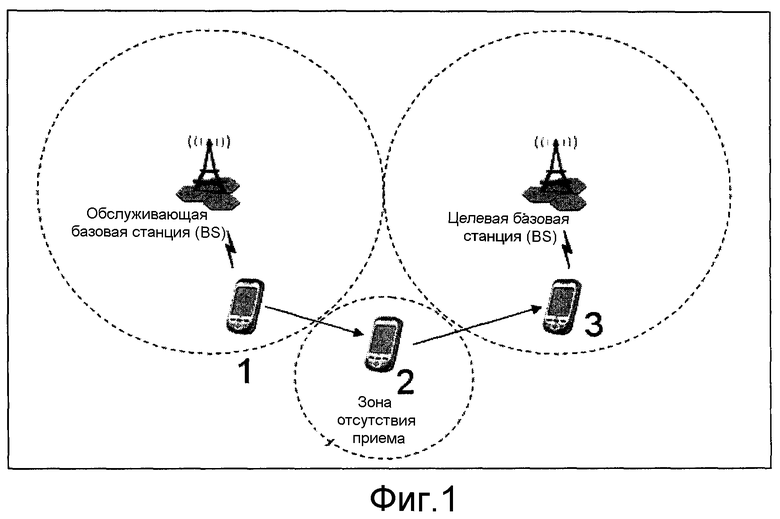
[0025] Фиг.1 представляет собой схематичный вид первого сценария содействия, через терминал, обнаружению зоны отсутствия приема (слепой области) в соответствии с одним вариантом осуществления настоящего изобретения;
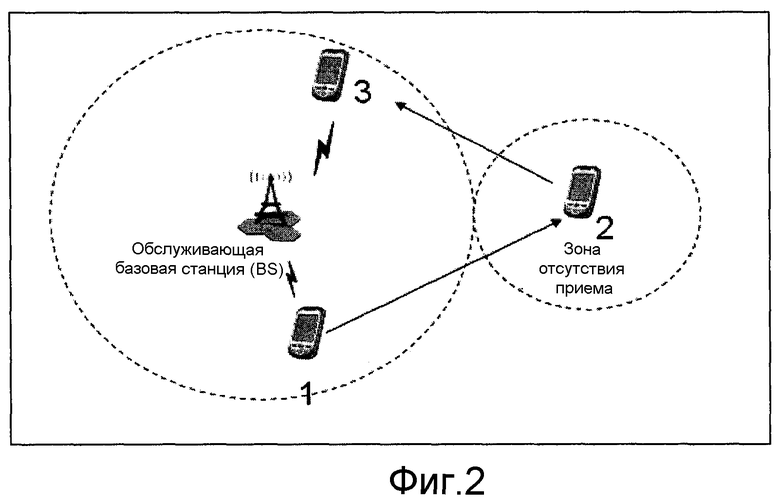
[0026] фиг.2 представляет собой схематичный вид второго сценария содействия, через терминал, обнаружению слепой области в соответствии с одним вариантом осуществления настоящего изобретения;
[0027] фиг.3 представляет собой блок-схему последовательности операций содействия, через терминал, обнаружению слепой области в соответствии с одним вариантом осуществления настоящего изобретения;
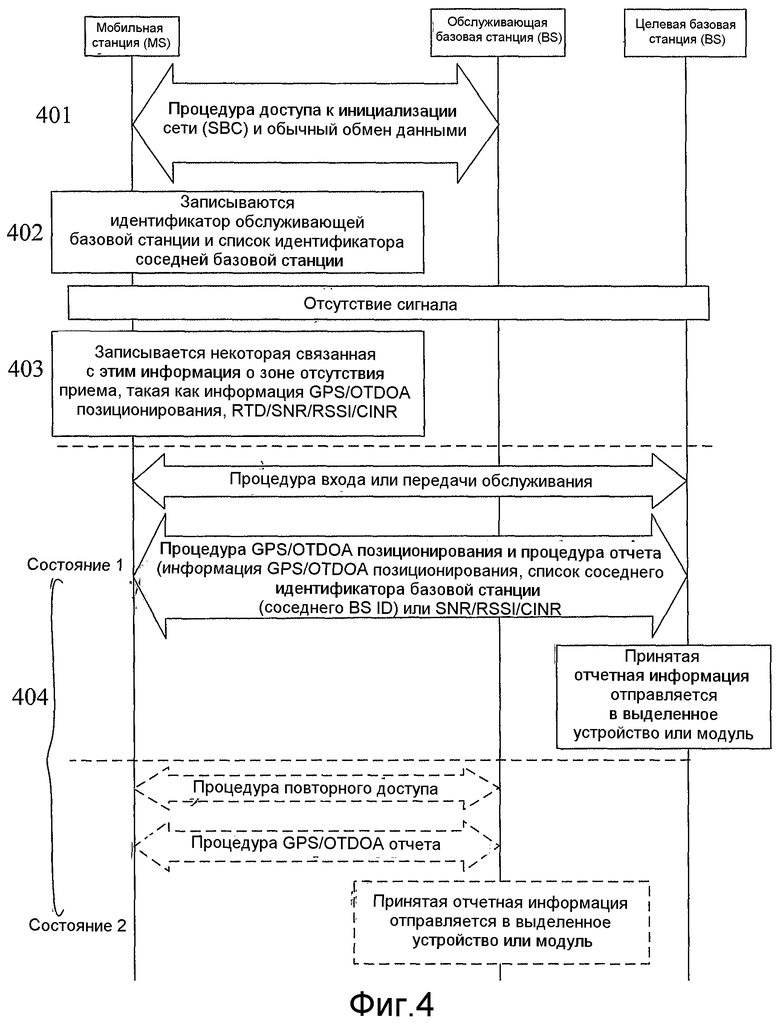
[0028] фиг.4 представляет собой блок-схему последовательности операций содействия, посредством MS, обнаружению слепой области в случае, когда в наличии имеется GPS или наблюдаемая разность моментов времени прихода сигналов (OTDOA) в соответствии с первым вариантом осуществления настоящего изобретения;
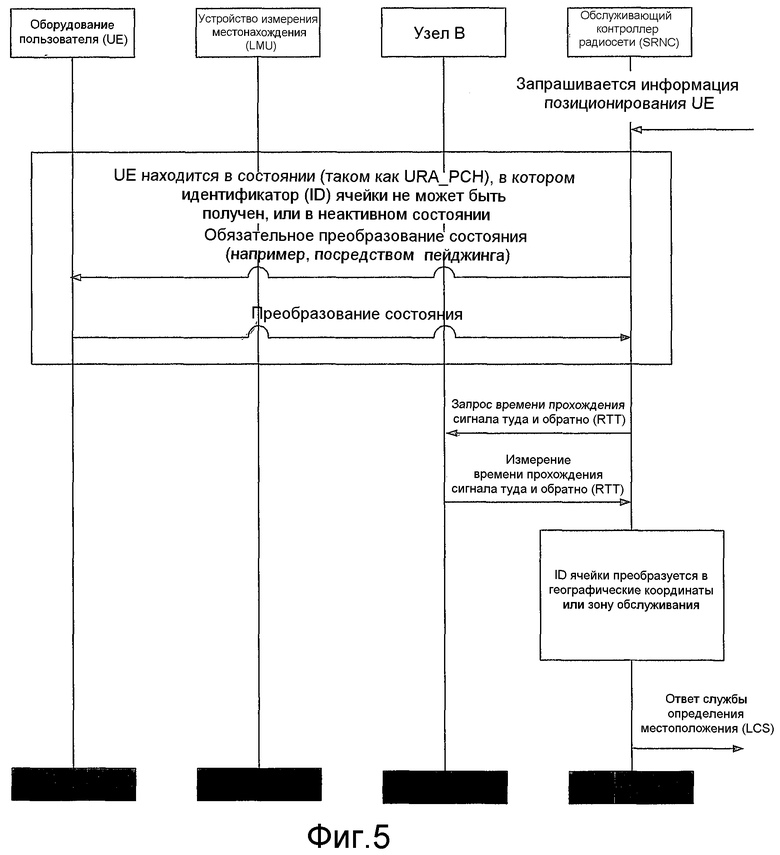
[0029] фиг.5 представляет собой блок-схему последовательности операций способа CELL_ID позиционирования с контроллером радиосети (RNC) в качестве центра в соответствии с одним вариантом осуществления настоящего изобретения;
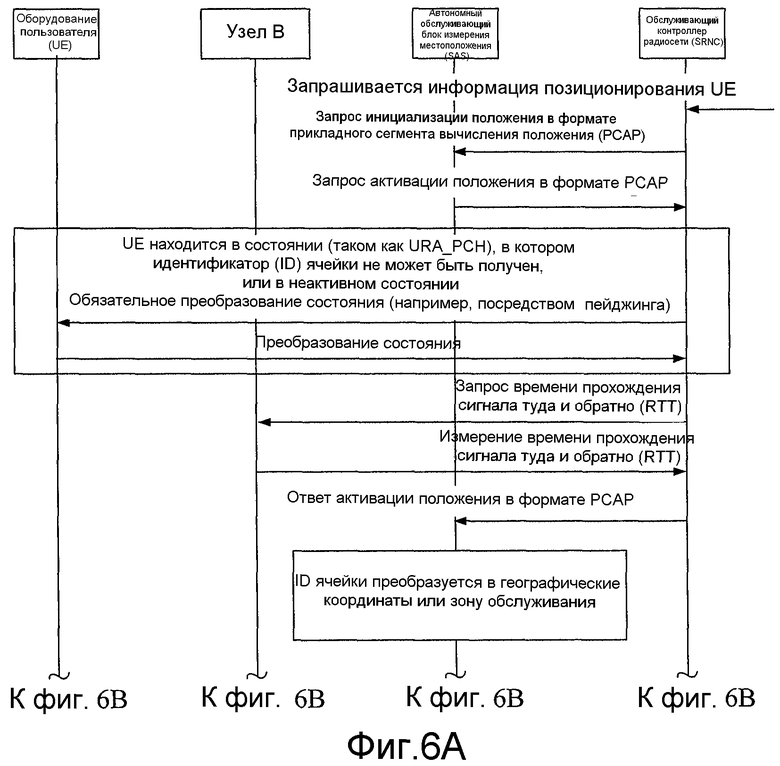
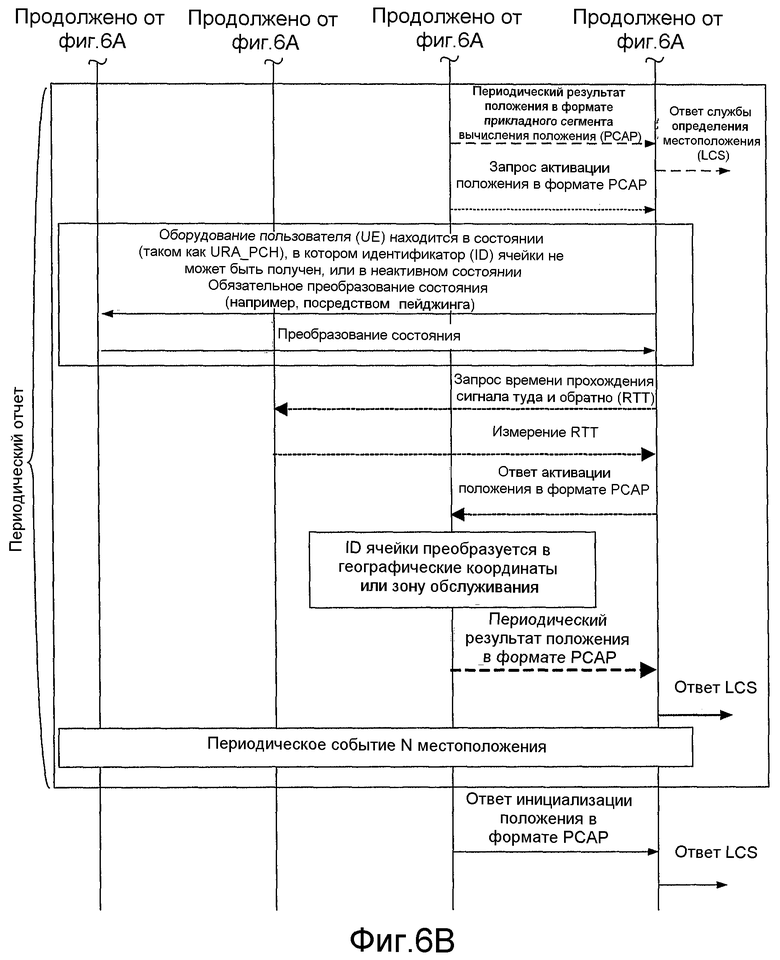
[0030] фиг.6 представляет собой блок-схему последовательности операций способа CELL_ID позиционирования с автономным SLMU (обслуживающий блок измерения местоположения) (SAS) в качестве центра в соответствии с одним вариантом осуществления настоящего изобретения;
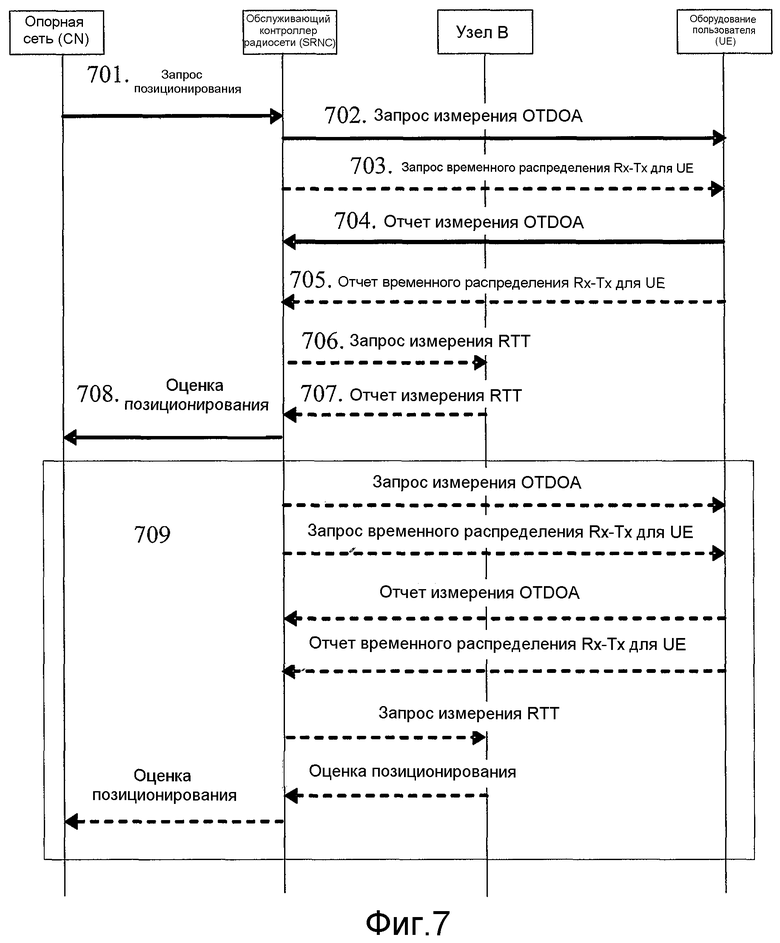
[0031] фиг.7 представляет собой блок-схему последовательности операций способа OTDOA позиционирования на основе RNC в соответствии с одним вариантом осуществления настоящего изобретения;
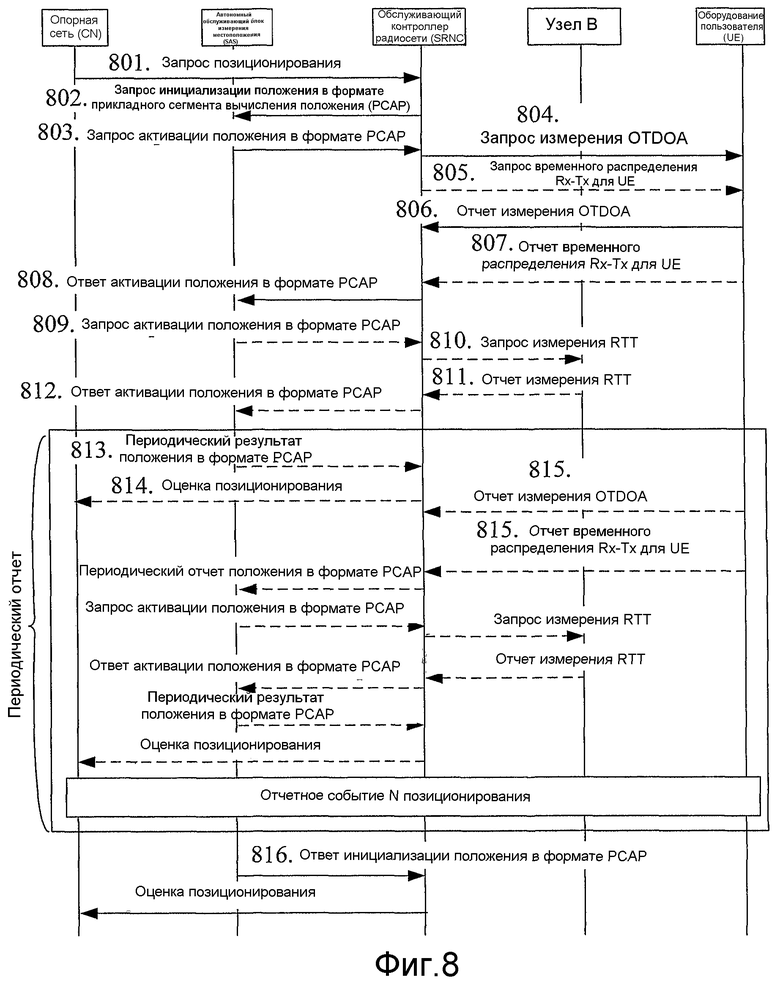
[0032] фиг.8 представляет собой блок-схему последовательности операций способа OTDOA позиционирования на основе SAS в соответствии с одним вариантом осуществления настоящего изобретения;
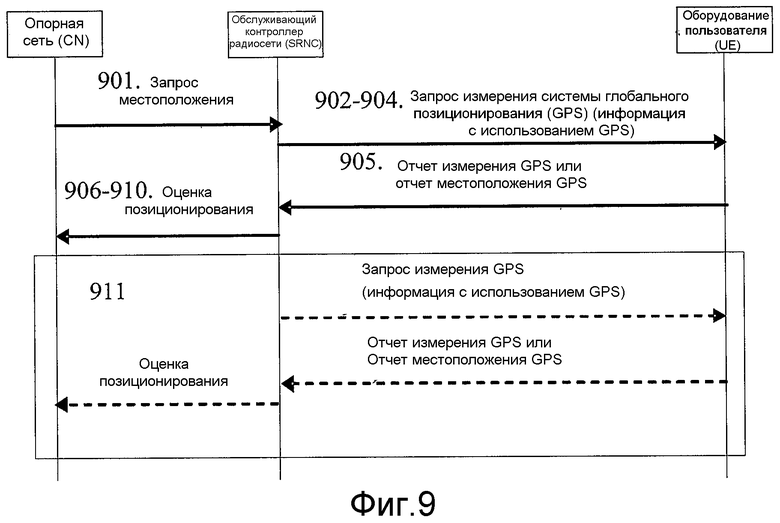
[0033] фиг.9 представляет собой блок-схему последовательности операций способа GPS позиционирования с использованием сети, основанного на RNC, в соответствии с одним вариантом осуществления настоящего изобретения;
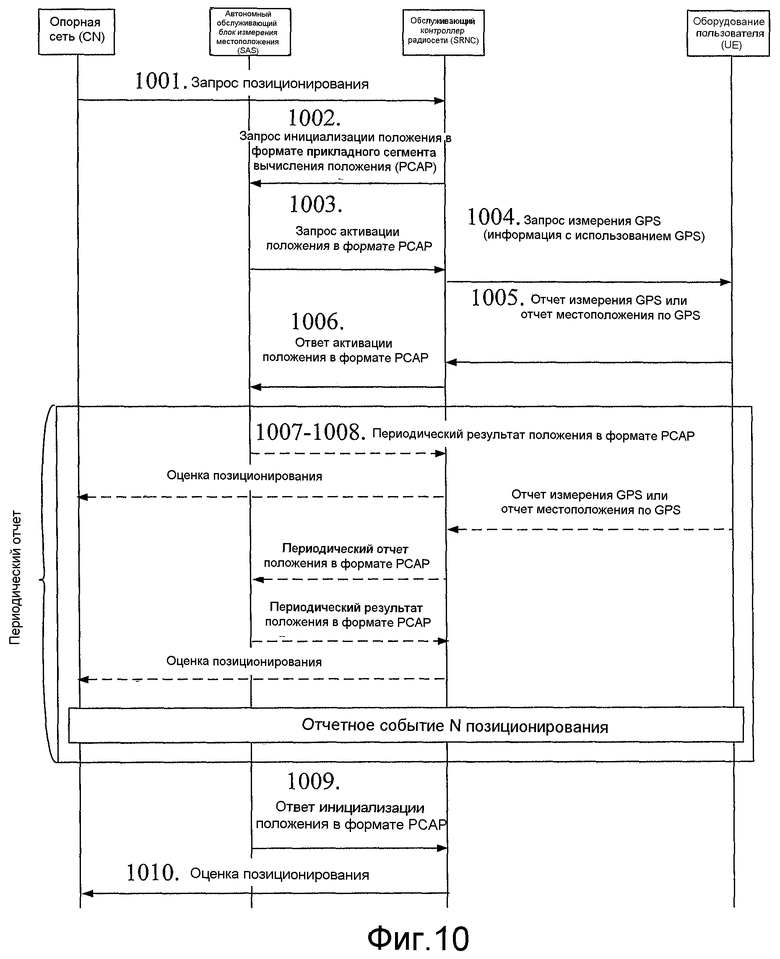
[0034] фиг.10 представляет собой блок-схему последовательности операций способа GPS позиционирования с использованием сети, основанного на SAS, в соответствии с одним вариантом осуществления настоящего изобретения;
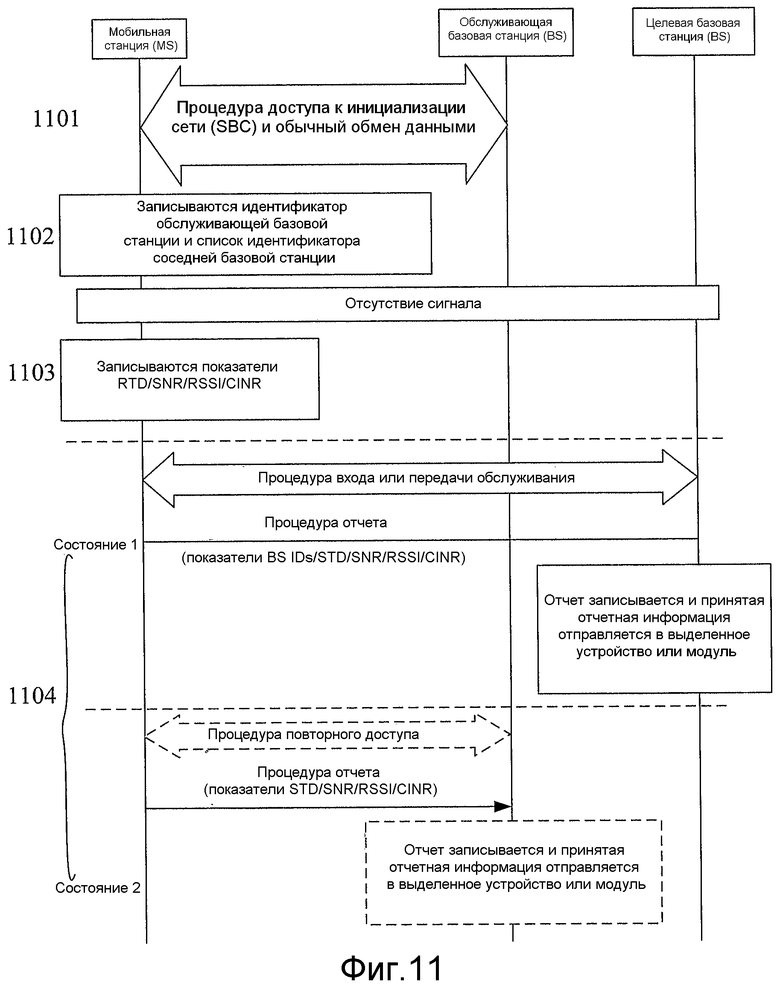
[0035] фиг.11 представляет собой блок-схему последовательности операций содействия, посредством терминала пользователя, обнаружению слепой области в случае, когда в наличии не имеется GPS/OTDOA, а только CELL_ID позиционирование в соответствии с одним вариантом осуществления настоящего изобретения; и
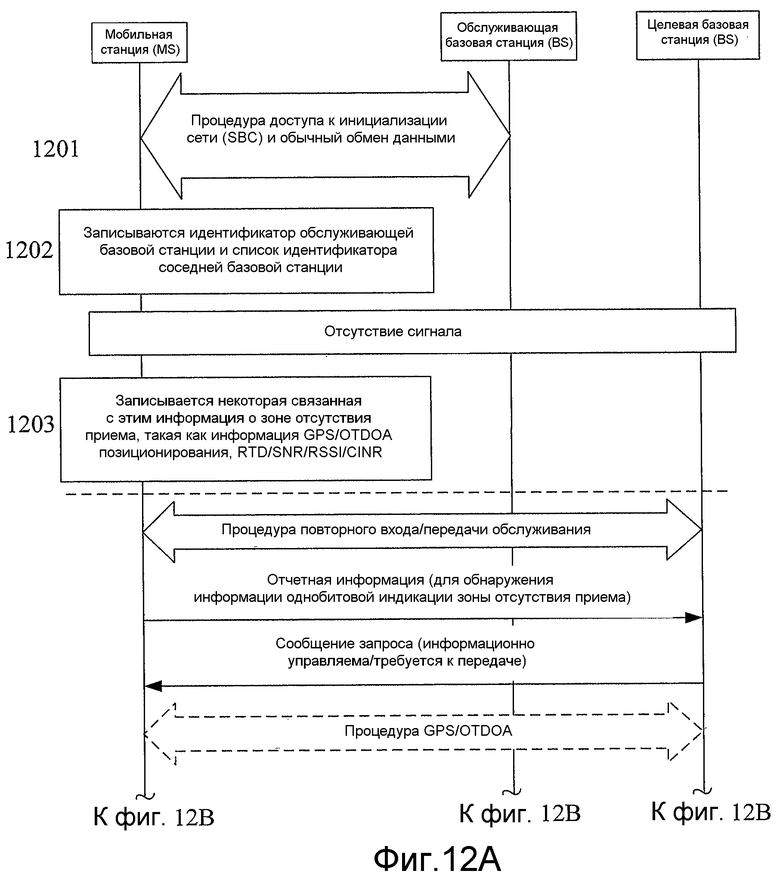
[0036] фиг.12 представляет собой блок-схему последовательности операций содействия, посредством терминала пользователя, обнаружению информации о слепой области посредством отправки сообщения указания в соответствии с одним вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0037] Специфические осуществления настоящего изобретения далее дополнительно детально описаны в настоящем документе со ссылкой на сопровождающие чертежи и варианты осуществления.
[0038] В одном варианте осуществления, настоящее изобретение обеспечивает способ для содействия, посредством MS, обнаружению слепой области в самоорганизующейся сети (SON). Данная слепая область относится к области, в которой пользователь не может обмениваться данными с сетью, включающей область, в которой сетевая информация может быть принята, в то время как данная информация не может быть передана в виде отчета, и область, в которой сетевая информация не может быть принята, и данная информация не может быть передана в виде отчета.
[0039] SON в основном включает автоматические процессы управления конфигурации и оптимизации в планировании, процессы построения, конфигурации и модернизации BS, и вместе с тем может также включать автоматические процессы управления, конфигурации и оптимизации, вызванные изменением состояния сетевых элементов в сети. Например, когда генерируется аварийный сигнал сетевого управления, данная сеть нуждается в выполнении функций, таких как автоматическое обнаружение, оценка и восстановление.
[0040] Для случаев помех, параметры, по которым данные помехи категоризируются в сети, представляют собой индикатор уровня принимаемого сигнала (RSSI), отношение сигнал-шум (SNR), помеха (I), отношение помеха-шум (INR) соответственно, специфически являющиеся следующими:
[0041] Во-первых, пороговые значения, определенные посредством каждого связанного с этим параметра, являются следующими:
[RSSImin]=R;
[SNRmin]=S;
[Imargin]=I; и
[INRmin]=log1010^(I/10)-1=N,
где RSSI представляет собой индикатор уровня принимаемого сигнала; SNR представляет собой отношение сигнал-шум; INR представляет собой отношение помеха-шум; и I представляет собой помеху.
[0042] Помехи категоризируются следующим образом:
[0043] Приемлемыми условиями помехи являются RSSI>R, SNR>S, и INR<N.
[0044] Разрушительными условиями помехи являются RSSI>R, SNR>S, и INR>N.
[0045] Меняющимися условиями помехи являются RSSI>R, SNR<S, и INR>N.
[0046] В соответствии с различными условиями помехи, также существует разница в обработке. Например, в ситуации приемлемой помехи связь может еще продолжаться без корректировки; в ситуации разрушительной помехи, хотя пользователь может обмениваться данными, в любое время существует риск прерывания связи, вызванного с помехой, таким образом, источник разрушительной помехи может быть определен посредством определенной техники, и через координационный механизм гарантируется, что сетевой сигнал не будет подвержен помехе; а в ситуации меняющейся помехи, пользователь уже не может обмениваться данными с сетью, но еще может принимать связанную с этим информацию, и в это время, если помеха не может быть устранена, пользователь прервет связь по причине помехи.
[0047] Основой оценки и связанной с этим информации о слепой области являются: RSSI>R, SNR<S, INR>N (слепая область с сигналом, то есть меняющаяся помеха) или RSSI<R, SNR<S, и INR>N (слепая область без сигнала).
[0048] Варианты осуществления настоящего изобретения в основном относятся к обработке слепой области без сигнала. Основными сценариями являются, как продемонстрировано на фиг.1 и фиг.2, те, при которых один терминал пользователя находится в активном состоянии в определенной ячейке, такой как местоположение 1 области покрытия обслуживающей BS на фиг.1 или фиг.2.
[0049] 1. Терминал пользователя входит, в процессе движения, из области с сетевым сигналом в слепую область, такую как область, в которой расположено местоположение 2, как продемонстрировано на фиг.1 или фиг.2, и терминал пользователя может оценить, входить ли в слепую область без сигнала через значения полученных RSSI, SNR и INR. В ситуации, когда терминал пользователя не может принять никакую информацию сети в пределах слепой области, записывается информация обнаружения. Данная информация обнаружения включает идентификатор (ID) обслуживающей BS. В ситуации, когда терминал пользователя записывает информацию обнаружения, специфически, терминал пользователя записывает информацию обнаружения в пределах заранее установленного времени.
[0050] 2. Если терминал пользователя продолжает движение и возвращается обратно из слепой области к области с сетевым сигналом, такой как местоположение 3 области покрытия целевой BS на фиг.1 или местоположение 3 области покрытия обслуживающей BS на фиг.2, терминал пользователя получает связанную с этим информацию о текущей слепой области в соответствии с информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен.
[0051] 3. После подтверждения посредством устройства сетевой стороны, терминал пользователя передает в виде отчета полученную связанную с этим информацию о слепой области на устройство сетевой стороны. Специфически, терминал пользователя устанавливает соединение с устройством сетевой стороны путем восстановления сигнала. Терминал пользователя отправляет информацию указания на устройство сетевой стороны, так чтобы указать, что терминал пользователя ранее вошел в слепую область, и требует передачи в виде отчета связанной с этим информации о слепом узле. Устройство сетевой стороны оценивает, требуется ли передача в виде отчета информации о слепой области, и, если передача в виде отчета информации о слепой области не требуется, выполняет обычный обмен данными, а если передача в виде отчета информации о слепой области требуется, отправляет сообщение запроса на передачу в виде отчета информации о слепом узле на терминал пользователя. Данное сообщение запроса может проводить связанное с этим содержание, такое как местоположение ресурсов, назначенных терминалу пользователя для передачи в виде отчета информации о слепой области. Терминал пользователя унифицированным путем передает в виде отчета информацию, требуемую для передачи посредством устройства сетевой стороны, на устройство сетевой стороны через ответное сообщение.
[0052] 4. Модуль или устройство связанной с этим обработки слепой области в устройстве сетевой стороны получает местоположение слепой области. Специфически, устройство сетевой стороны выполняет вычисление слепой области и машинное вычисление местоположения в соответствии с принятой информацией, переданной в виде отчета терминалом пользователя с целью получения информации местоположения слепой области.
[0053] В описанном выше процессе динамического передвижения, существует механизм связи или способ связи между терминалом пользователя и узлом в сетевой стороне (таким как обслуживающая BS и целевая BS), так чтобы гарантировать, что, когда пользователь нуждается в передаче в виде отчета информации о слепом узле на сетевую сторону, пользователь может использовать связанные с эти ресурсы.
[0054] Фиг.3 представляет собой блок-схему последовательности операций процедуры для обнаружения слепой области в соответствии с одним вариантом осуществления настоящего изобретения. Как продемонстрировано на фиг.3, данная процедура специфически включает следующие этапы.
[0055] На этапе 301, MS выполняет процедуру доступа к инициализации сети через обслуживающую BS, причем данная процедура доступа к инициализации сети включает процедуру согласования базовой возможности абонентской станции (SBC). Данная процедура согласования SBC включает следующий дополнительный этап: согласовывается, поддерживают ли MS и сетевая сторона функцию обнаружения слепой области с использованием пользователя, и затем MS присоединяется к сети через обслуживающую BS.
[0056] На этапе 302, MS в ситуации, когда находится в активном состоянии, получает информацию через обслуживающую сеть и передает связанную с этим информацию, требуемую для обнаружения слепой области, посредством способа соединения. Затем, по причине передвижения, MS входит в слепую область без сигнала, то есть RSSI<R, SNR<S, и INR>N.
[0057] На этапе 303, если MS передвигается из слепой области, то есть когда показатели RSSI и SNR, принятые MS, являются ниже, чем пороговое значение, MS оценивает и записывает некоторую связанную с этим информацию ухода из слепой области.
[0058] На этапе 304, в случае, как продемонстрировано на фиг.1, то есть пользователь передвигается от области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия целевой BS. В процессе передвижения, MS может получать сигнал целевой BS; после получения связанной с этим информации в сигнале целевой BS MS устанавливает связь с сетевой стороной, и MS получает доступ к сетевой стороне через соединение и взаимодействует, принимая во внимание информацию о слепой области, с сетевой стороной (такой как целевая BS). Затем сетевая сторона выполняет вычисление и производит машинное вычисление местоположения слепой области посредством эксклюзивного модуля или эксклюзивного устройства. В случае, как продемонстрировано на фиг.2, то есть пользователь передвигается от области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия обслуживающей BS. В процессе передвижения, MS снова получает сигнал обслуживающей BS, после получения связанной с этим информации в сигнале обслуживающей BS, MS устанавливает связь с сетевой стороной, и MS получает доступ к сетевой стороне через соединение и взаимодействует, принимая во внимание информацию о слепой области, с сетевой стороной (такой как обслуживающая BS). Затем сетевая сторона выполняет вычисление и производит машинное вычисление местоположения слепой области посредством эксклюзивного модуля или эксклюзивного устройства.
[0059] Этап 302 в данном варианте осуществления представляет собой процесс отчета обнаружения слепой области без сигнала, в то время как в действительности подобный способ может также быть принят с целью определения и передачи в виде отчета информации о слепой области с сигналом, такой как при оценке показателей RSSI>R, SNR<S, INR>N.
[0060] Между тем, этап 304 корректируется следующим образом. После подтверждения посредством устройства сетевой стороны, MS отправляет идентификатор и информацию о слепой области с помощью сигнала на устройство сетевой стороны, так чтобы устройству сетевой стороны стала известна ситуация слепой области с сигналом, и корректирует покрытие сетевой ячейки, расположенной близко к слепой области, с помощью сигнала в соответствии с результатом вычисления, переданным с обратной связью в течение определенного времени.
[0061] Фиг.4 демонстрирует процедуру содействия, посредством терминала пользователя, обнаружению слепой области в случае, когда в наличии имеется GPS или OTDOA в соответствии с первым вариантом осуществления настоящего изобретения. Как продемонстрировано на фиг.4, данная процедура специфически включает следующие этапы.
[0062] На этапе 401, MS выполняет процедуру доступа к инициализации сети посредством взаимодействия с обслуживающей BS, которая включает процедуру согласования SBC. Данная процедура согласования SBC включает следующий дополнительный этап. Согласовывается, поддерживают ли MS и сетевая сторона функцию GPS/OTDOA, и поддерживают ли MS и сетевая сторона функцию обнаружения слепой области, и затем MS присоединяется к сети через обслуживающую BS.
[0063] На этапе 402, MS получает информацию, такую как идентификатор обслуживающей BS (ID обслуживающей BS), через обслуживающую сеть, и передает относящуюся к соседям информацию посредством способа соединения, такую как список ID соседних BS, и/или, если MS периодически выполняет позиционирование, через систему позиционирования получают и сохраняют информацию позиционирования на последний момент времени MS.
[0064] На этапе 403, MS входит в слепую область, то есть, когда RSSI и SNR, принятые MS, имеют показатели ниже определенного порогового значения, MS оценивает и записывает некоторую связанную с этим информацию о слепой области, такую как информация GPS/OTDOA позиционирования последнего момента времени перед входом в слепую область.
[0065] На этапе 404, в случае, когда пользователь передвигается из области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия целевой BS, MS оценивает тот факт, что MS входит в сеть с сигналом, через значения обнаружения принятых RSSI, SNR, то есть выходит из слепой области, и MS получает доступ к новой сети и устанавливает соединение. Затем MS инициирует запрос позиционирования к сетевой стороне, и последовательно начинает процедуру позиционирования, и получает информацию текущего местоположения MS. MS передает в виде отчета информацию, записанную в процессе нахождения в слепой области, и информацию местонахождения выхода из слепой области на целевую BS, целевая BS отправляет принятую отчетную информацию на модуль или устройство обнаружения слепой области и выполняет вычисление слепой области и машинное вычисление местоположения посредством принятия определенного алгоритма (такого как алгоритм GPS позиционирования, алгоритм OTDOA позиционирования, или алгоритм CELL_ID позиционирования) с целью получения информации местоположения слепой области.
[0066] В случае, когда пользователь передвигается из области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия обслуживающей BS, после получения связанной с этим информации, MS устанавливает связь с сетевой стороной. MS отправляет сообщение запроса позиционирования на обслуживающую BS через установленное соединение, и входит в процедуру позиционирования с целью получения текущего местоположения, и последовательно взаимодействует, принимая во внимание связанную с этим информацию о слепой области, с сетью (такой как обслуживающая BS на фиг.2) через процедуру отчета, такую как информация GPS/OTDOA позиционирования передвижения в или из слепой области, или ID обслуживающей BS и список ID соседних BS до входа в слепую область, или SNR/RSSI/CINR. Обслуживающая BS отправляет принятую связанную с этим информацию о слепой области на эксклюзивный модуль или эксклюзивное устройство, и выполняет вычисление, и производит машинное вычисление местоположения слепой области посредством принятия определенного алгоритма (такого как алгоритм GPS позиционирования, алгоритм OTDOA позиционирования, или алгоритм CELL_ID позиционирования).
[0067] Данный вариант осуществления настоящего изобретения может быть применен к среде плана партнерства третьего поколения (3GPP), и может также быть применен к среде стандарта IEEE 802.16. Однако, названия элементов (объектов) в данных двух средах применения являются различными. В последующих вариантах осуществления, в среде 3GPP терминал пользователя представляет собой UE (оборудование пользователя), а в BS представляет собой узел B + SRNC (обслуживающий контроллер радиосети), причем узел B является ответственным за функции, такие как прием и ретрансляция, в то время как SRNC является ответственным за функции, такие как обработка и планирование. В стандарте IEEE 802.16, терминал представляет собой MS, а базовая станция представляет собой BS. Хотя названия элементов (объектов) в данных двух средах являются различными, функции, выполняемые в действительности, являются схожими. Вследствие этого, последующие варианты осуществления являются проиллюстрированными посредством взятия среды 3GPP в качестве примера.
[0068] Способ позиционирования на основе CELL_ID определяет посредством получения ID ячейки целевого UE местоположение, в котором располагается целевое UE, и обеспечивает его для пользователя позиционирования. Целевое UE находится в различных состояниях, таких как CELL_DCH (выделенный канал) (в данном состоянии, один выделенный физический канал является назначенным для UE в восходящей линии связи и нисходящей линии связи. В соответствии с текущим набором активности UE, ячейка, в которой располагается UE, может стать известной, и UE может использовать выделенный канал передачи, совместно используемый канал передачи нисходящей/восходящей линии связи, или комбинацию этих каналов передачи), и CELL_FACH (канал прямого доступа) (в данном состоянии, ни один выделенный канал передачи не является назначенным для UE, и UE осуществляет непрерывный контроль над одним FACH каналом нисходящей линии связи, один принятый по умолчанию общий канал восходящей линии связи или совместно используемый канал передачи восходящей линии связи назначается для UE, так чтобы оно было в состоянии использовать данный канал в любое время в процессе доступа. Местоположение UE на уровне ячейки становится известным посредством UTRAN, наземной сети радиодоступа UMTS (универсальной системы мобильных телекоммуникаций), специфически, это представляет собой передающую отчет ячейку в ситуации, когда UE инициирует обновление ячейки на последний момент времени). После того, как опорная сеть (CN) выдает запрос службы определения местоположения (LCS), SRNC запрашивает состояние UE. Если UE находится в неактивном состоянии, SRNC выполняет поисковый вызов (пейджинг) на UE, так чтобы определить ID ячейки, в которой располагается UE. С целью улучшения точности, SRNC может дополнительно принимать способ измерения времени прохождения сигнала туда и обратно (RTT), используемый в дуплексной связи с частотным разделением (FDD), или способ временного отклонения Rx, используемый в дуплексной связи с временным разделением (TDD). В ситуации, когда UE находится в состоянии мягкой передачи обслуживания, оно может находиться в состоянии связи с множеством ячеек, и обычно ID ячеек определяются посредством следующих нескольких типов способов: выбора ячейки с лучшим качеством сигнала; выбора ячейки, используемой для связи между UE и узлом B; выбора ячейки, недавно связанной с UE; выбора ячейки, используемой UE в последнее время и не подготовленной к передаче обслуживания; выбора ячейки с наиболее коротким расстоянием от узла B; и выбора ячейки, находящейся в состоянии связи с UE при приеме запроса SRNC. Ячейка может также быть выбрана на основе измерения RTT или уровня мощности сигналов, принятых UE, узлом B, или устройством измерения местонахождения (LMU). Другие способы, такие как нисходящая связь периода неактивности (IPDL) или передача с разнесением для выбора передающего устройства (SSDT), могут также быть приняты для выбора ячейки. После определения ID ячейки является необходимым преобразовать ID ячейки в географические координаты или обслуживающую область. Фиг.5 демонстрирует способ CELL_ID позиционирования с RNC в качестве центра, а фиг.6 демонстрирует способ CELL_ID позиционирования с SAS в качестве центра.
[0069] Способ OTDOA позиционирования продемонстрирован на фиг.4. UE измеряет управляемые сигналы нисходящей связи различных BS с целью получения времени прихода сигнала (TOA) устройства управления нисходящей линией связи различных BS, то есть так называемого измерения фазы управления. В соответствии с результатом измерения и в связи с координатами BS принимается подходящий способ оценки местоположения, так чтобы произвести машинное вычисление местоположения UE. Способ оценки фактического местоположения нуждается в рассмотрении случая позиционирования множества BS (трех или четырех), и, таким образом, алгоритм является более сложным. Обычно, чем большим является количество BS, измеренных посредством UE, тем выше точность измерения, тем более явно меняется выполнение позиционирования, и тем более сложным является алгоритм. В ситуации, когда используется способ позиционирования, для BS, измеряемых посредством UE, является необходимой одновременная отправка управляющих сигналов нисходящей связи. Вследствие этого, все BS в сети должны осуществлять временную синхронизацию. Обычно, синхронизация отправки посредством BS управляющих сигналов нисходящей связи может быть осуществлена посредством установки приемников GPS на BS или подсоединения к сети временной синхронизации.
[0070] Фиг.7 демонстрирует способ OTDOA позиционирования на основе SRNC. Как продемонстрировано на фиг.7, данный способ включает следующие этапы.
[0071] На этапе 701, CN отправляет сообщение запроса местоположения на SRNC, так чтобы запросить информацию местоположения целевого UE. SRNC рассматривает запрос и возможности позиционирования UTRAN и UE.
[0072] На этапе 702, SRNC отправляет сообщение запроса измерения OTDOA на UE, так чтобы запросить способ OTDOA позиционирования. На данном этапе, UE должно находиться в состоянии CELL_DCH. Если сообщение запроса местоположения на этапе 701 включает информацию периодического отчета положения, SRNC запрашивает периодический отчет измерения OTDOA.
[0073] На этапе 703, SRNC отправляет на UE сообщение запроса временного распределения Rx-Tx для UE, так чтобы запросить информацию временной разности Rx-Tx (используемую для FDD) или информацию TA (используемую для TDD) или Tadv (используемую для 1.28 Mcps в TDD). Если сообщение запроса позиционирования на этапе 701 включает информацию периодического отчета положения, SRNC запрашивает периодический отчет измерения OTDOA. Данный этап является дополнительным.
[0074] На этапе 704, UE отправляет отчет измерения OTDOA на SRNC и выдает результат измерения OTDOA. SRNC принимает информацию измерения OTDOA и собирает другую информацию вычисления.
[0075] На этапе 705, UE отправляет сообщение запроса временного распределения Rx-Tx на SRNC и выдает информацию временной разности Rx-Tx (используемую для FDD) или информацию TA и Tadv (используемые для TDD) и соответствующую метку времени на SRNC. Данный этап является дополнительным.
[0076] На этапе 706, если информация измерения OTDOA является недостаточной, или с целью увеличения эффекта измерения, SRNC запрашивает RTT (используется для FDD) или TA Rx (используется для TDD) от обслуживающего узла В. В FDD, SRNC запрашивает задержку между отправкой запроса и получением ответа (RTD) из связанной с этим базы данных. Если RTD является константой величиной, она может быть локально сохранена. В случае, если она является переменной величиной, RTD должна обновляться в течение времени задержки (TOD) измерения OTDOA.
[0077] На этапе 707, узел В выдает RTT (используется для FDD) или временное отклонение Rx (используется для TDD) и/или угол прихода (1.28 Mcps в TDD) на SRNC. SRNC использует OTDOA для выполнения позиционирования или измерения скорости. Машинное вычисление включает преобразование позиционирования. Оценка позиционирования включает результат позиционирования и точность оценки результата. Дополнительная оценка скорости может также включать точность.
[0078] На этапе 708, SRNC отправляет оценку позиционирования на CN, причем данная оценка позиционирования включает способ позиционирования и точность позиционирования. Если CN требует точности позиционирования, оценка позиционирования дополнительно включает указание, удовлетворяет ли точность позиционирования требуемой точности.
[0079] На этапе 709, если этап 701, этап 702 и этап 703 требуют периодического отчета, повторяются этапы с 704 по 710. Если периодического отчета требует только этап 701 (CN требует периодического отчета), в то время как этап 702 и этап 703 не требуют периодического отчета (SRNC не требует периодического отчета), повторяются этапы с 702 по 708.
[0080] Фиг.8 демонстрирует способ OTDOA позиционирования на основе SAS. Как продемонстрировано на фиг.8, данный способ включает следующие этапы.
[0081] На этапе 801, CN отправляет сообщение запроса местоположения на SRNC, так чтобы запросить информацию местоположения целевого UE. SRNC рассматривает запрос и возможности позиционирования UTRAN и UE.
[0082] На этапе 802, SRNC отправляет сообщение запроса инициализации положения в формате прикладного сегмента вычисления положения (PCAP) на SAS. Данное сообщение включает информацию запроса местоположения и сообщение периодического отчета, CELL_ID, и возможность позиционирования UE.
[0083] На этапе 803, SAS отправляет сообщение ответа инициализации положения в формате PCAP на SRNC, так чтобы запросить способ OTDOA позиционирования, и может одновременно запрашивать информацию RTT (используется для FDD), или TA (используется для TDD), или Tadv (используется для 1.28 Mcps в TDD). Данное сообщение может включать сообщение периодического отчета.
[0084] На этапе 804, SRNC отправляет сообщение запроса измерения OTDOA на UE, так чтобы запросить способ OTDOA позиционирования. В это время, UE должно находиться в состоянии CELL_DCH. Если сообщение запроса местоположения на этапе 801 включает информацию периодического отчета положения, SRNC запрашивает периодический отчет измерения OTDOA.
[0085] На этапе 805, если SAS запрашивает информацию временного распределения Rx-Tx, SRNC запрашивает от UE информацию временной разности Rx-Tx, (используется для FDD), или информацию TA (используется для TDD), или Tadv (используется для 1.28 Mcps в TDD). Данный запрос может включать периодическую отчетную информацию. Данный этап является дополнительным.
[0086] На этапе 806, UE выдает отчет измерения OTDOA на SRNC. SRNC принимает информацию измерения OTDOA и собирает другую информацию вычисления.
[0087] На этапе 807, UE выдает информацию временной разности Rx-Tx, (используется для FDD), или информацию TA (используется для TDD), или Tadv (используется для 1.28 Mcps в TDD) и метку времени на SRNC. Данный этап является дополнительным.
[0088] На этапе 808, SRNC пересылает информацию отчета измерения OTDOA на SAS. Данная информация существует в виде сообщения ответа активации положения в формате PCAP и может дополнительно включать информацию отчета измерения RTT.
[0089] На этапе 809, если информация измерения OTDOA является недостаточной, или с целью увеличения эффекта измерения, SAS запрашивает RTT (используется для FDD) или TA Rx (используется для TDD) от обслуживающего узла В. Данный этап является дополнительным.
[0090] На этапе 810, в FDD, на основе ввода от LMU, RTD вычисляется и сохраняется в SAS. Данный этап является дополнительным.
[0091] На этапе 811, узел В выдает RTT (используется для FDD) или временное отклонение Rx (используется для TDD) и/или угол прихода (1.28 Mcps в TDD) на SRNC. Данный этап является дополнительным.
[0092] На этапе 812, SRNC пересылает CELL_ID и RTT (используются для FDD) или TA (используется для TDD) или информацию угла прихода (используется для 1.28 Mcps в TDD) на SAS. Данные сообщения существуют в виде сообщения ответа активации положения в формате PCAP. Данный этап является дополнительным.
[0093] На этапе 813, SAS выполняет машинное вычисление позиционирования на основе OTDOA или на основе CELL_ID. Если этап 801 не требует периодического доклада, SAS пересылает информацию позиционирования на SRNC посредством проведения информации позиционирования в сообщении ответа инициализации положения в формате PCAP. Если этап 801 требует периодического отчета, SAS пересылает информацию позиционирования на SRNC посредством проведения информации позиционирования в сообщении периодического результата положения в формате PCAP. Машинное вычисление включает преобразование позиционирования. Оценка позиционирования включает результат позиционирования и точность оценки результата. Дополнительная оценка скорости может также включать точность.
[0094] На этапе 814, SRNC передает оценку позиционирования на CN. Информация, передаваемая одновременно, включает способ позиционирования и дополнительную оценку скорости. Если CN требует точности позиционирования, оценка позиционирования дополнительно включает указание, удовлетворяет ли точность позиционирования требуемой точности.
[0095] На этапе 815, если этап 804 и этап 805 требуют периодического отчета позиционирования, UE отправляет отчет измерения OTDOA, или RTT (используется для FDD), или TA (используется для TDD), или информацию угла прихода (используется для 1.28 Mcps в TDD) в каждый интервал времени и отправляет метку времени на SRNC, а SRNC отправляет сообщения на SAS посредством проведения данных сообщений в сообщении периодического отчета положения в формате PCAP. Для новой оценки позиционирования, каждый раз, повторяются этапы с 809 по 812. SAS выполняет оценку позиционирования на основе OTDOA или на основе CELL_ID и пересылает новую информацию позиционирования на SRNC посредством проведения новой информации позиционирования в сообщении периодического результата положения в формате PCAP. SRNC пересылает оценку местоположения информации и способ позиционирования, а также дополнительную скорость на CN. Сообщение ответа местоположения может включать указание, удовлетворяет ли точность позиционирования требуемой точности. Этап 815 повторяется до тех пор, пока показатели времен отчета не будут удовлетворять требованию или пока оценка местоположения не будет остановлена. SAS может отправить последнюю оценку местоположения на SRNC посредством проведения последней оценки местоположения в сообщении ответа инициализации положения в формате PCAP, а SRNC перешлет последнюю оценку местоположения на CN.
[0096] На этапе 816, если этап 804 или этап 805 не требуют периодической оценки позиционирования, в то время как этап 802 требует периодическую оценку местоположения, SAS может повторять этапы с 803 по 814 до тех пор, пока показатели времен позиционирования не удовлетворят требованию или пока процедура позиционирования не будет прекращена. В ситуации, когда последнее позиционирование повторяется до этапа 813, SAS может отправить последнюю оценку местоположения на SRNC посредством проведения последней оценки местоположения в сообщении ответа инициализации положения в формате PCAP.
[0097] Способ позиционирования на основе GPS осуществляется посредством следующих этапов. Сетевая сторона принимает содействующую информацию GPS. Данная сетевая сторона отправляет данную содействующую информацию GPS на UE. UE получает содействующую информацию GPS и производит машинное вычисление собственного точного местоположения. UE отправляет информацию местоположения на CN. Варианты способа позиционирования на основе GPS категоризируются в содействующий способ и автономный способ.
[0098] Способ содействующего GPS позиционирования переносит большинство функций обычного приемника GPS в необходимый к осуществлению сетевой процессор, нуждающийся в устройствах, таких как антенны, радиочастотные блоки и процессоры данных. Сетевая сторона отправляет на UE строку очень короткой содействующей информации, включающей время, список наблюдаемых спутников, доплеровские параметры спутников, и поисковые окна временного сдвига кода. Данные параметры являются полезными для встроенного модуля GPS в вопросах улучшения времени получения сигналов GPS. Содействующие данные происходят из данных псевдорасстояния, сгенерированных после обработки посредством модуля GPS в UE, и могут действовать в течение нескольких минут. После приема этих данных псевдорасстояния, соответствующий сетевой процессор или сервер позиционирования может приблизительно оценить местоположение UE. После того как к сетевой стороне добавляется необходимая модификация, точность позиционирования может быть увеличена.
[0099] Для способа автономного GPS позиционирования, UE включает один полнофункциональный приемник GPS, обладает всеми функциями UE по способу GPS позиционирования с использованием UE и дополнительно обладает функциями для машинного вычисления местоположений спутника и местоположений UE. В ситуации, когда начинается машинное вычисление местоположения, UE нуждается в большем количестве данных, чем в ситуации способа с использованием UE. Эти данные могут действовать более четырех часов или могут обновляться по необходимости, что обычно включает время, опорное местоположение, спутниковую эфемериду и параметры верификации времени. Если некоторые приложения нуждаются в более высокой точности, дифференциальные GPS сигналы (DGPS) должны посылаться на UE непрерывно. Сигналы DGPS являются эффективными в пределах очень широкого географического охвата, и сигналы могут обслуживаться в пределах более широкого географического охвата с помощью одного опорного приемника в качестве центра. Последнее местоположение машинно вычисляется и получается посредством самого UE. При необходимости, информация позиционирования может быть отправлена на любое приложение.
[0100] Фиг.9 демонстрирует способ GPS позиционирования с использованием сети, основанный на RNC. Как продемонстрировано на фиг.9, данный способ включает следующие этапы.
[0101] На этапе 901, прикладная программа в CN отправляет сообщение запроса местоположения на SRNC сетевой стороны, так чтобы запросить информацию местоположения целевого UE. SRNC рассматривает запрос и возможности позиционирования UTRAN и UE.
[0102] На этапе 902, в соответствии с возможностями UE, SRNC сетевой стороны отправляет запрос измерения GPS, проводящий информацию с использованием GPS на UE. Данная информация с использованием GPS включает опорное время, спутниковый ID, мощность доплеровского эффекта, поисковое окно и центральную точку, таблицу эфемерид и часовую поправку, а также ежегодник. В соответствии с возможностями UE, сетевая сторона отправляет запрос GPS позиционирования на UE. Если сообщение запроса местоположения на этапе 901 включает периодическую отчетную информацию, SRNC периодически запрашивает периодический отчет. Если UE не обладает достаточной содействующей информацией для выполнения измерения, от SRNC запрашивается больше содействующей информации. Если действует способ позиционирования на основе UE, процедура переходит на этап 908.
[0103] На этапе 903, если действует способ позиционирования на основе UE, до отправки содействующей информации на UE, SRNC запрашивает информацию, такую как обновление LMU и измерение RTT. LMU выдает разность между узлом В и GPS на SRNC. Узел В выдает измерение RTT на CRNC. Если данный CRNC не является SRNC, CRNC пересылает информацию на SRNC.
[0104] На этапе 904, SRNC сетевой стороны запрашивает от UE измерение спутниковой псевдодальности GPS, и запрашивает другую информацию. SRNC может запрашивать от UE измерение наблюдаемой временной разности SFN-SFN и информацию временной разности Rx-Tx.
[0105] На этапе 905, UE выдает информацию измерения спутниковой псевдодальности GPS и другую информацию на сеть. При необходимости, UE также выдает на SRNC измерение наблюдаемой временной разности SFN-SFN и информацию временной разности Rx-Tx, а также их метки времени.
[0106] На этапе 906, сетевая сторона производит машинное вычисление оценки позиционирования и дополнительную оценку скорости.
[0107] На этапе 907, если информация оценки позиционирования является недостаточной, SRNC повторно начинает новую процедуру позиционирования с этапа 903.
[0108] На этапе 908, если действует способ позиционирования на основе UE, UE отправляет оценку местоположения и дополнительную оценку скорости на SRNC. Сообщение включает информацию местоположения, дополнительную информацию скорости, точность и метки времени.
[0109] На этапе 909, в сети, включающей SAS, данный SAS передает оценку позиционирования на SRNC.
[0110] На этапе 910, SRNC передает информацию позиционирования и дополнительную оценку скорости на CN. Сообщение дополнительно включает способ позиционирования. Если CN требует точности оценки позиционирования, сообщение ответа местоположения включает указание, удовлетворяет ли точность позиционирования требуемой точности.
[0111] На этапе 911, если периодический отчет запрашивается на этапе 901 и этапе 902, повторяются этапы с 905 по 910. UE отправляет одну часть новой оценки местоположения в каждый интервал времени. Если CN запрашивает периодический отчет на этапе 901, в то время как SRNC не запрашивает периодический отчет на этапе 902, SRNC повторяет этапы с 902 по 910. SRNC отправляет одну часть новой оценки местоположения в каждый интервал времени на CN до тех пор, пока количество отчетов местоположения не удовлетворит требуемому количеству по запросу.
[0112] Фиг.10 демонстрирует способ GPS позиционирования с использованием сети, основанный на инициализации SAS. Как продемонстрировано на фиг.10, данный способ включает следующие этапы.
[0113] На этапе 1001, прикладная программа в CN отправляет сообщение запроса местоположения на SRNC, так чтобы запросить информацию местоположения целевого UE. SRNC рассматривает запрос и возможности позиционирования UTRAN и UE.
[0114] На этапе 1002, сообщение запроса местоположения, принимаемое посредством SRNC, дополнительно включает периодическое отчетное сообщение, и CELL_ID и возможности позиционирования UE существуют в запросе инициализации положения в формате PCAP.
[0115] На этапе 1003, в соответствии с возможностями UE, SAS отправляет сообщение запроса активации положения в формате PCAP на SRNC, так чтобы инициировать GPS позиционирование. Данное сообщение включает данные с использованием GPS и может дополнительно включать периодическую отчетную информацию. SAS может обеспечивать содействующие данные от множества GPS.
[0116] На этапе 1004, SRNC использует сигнализацию RRC для пересылки на UE запроса позиционирования SAS. Данная сигнализация RRC может включать периодическую отчетную информацию.
[0117] На этапе 1005, если действует GPS с использованием UE, SRNC запрашивает от UE информацию спутникового псевдоохвата GPS и другое измерение информации. SRNC может запрашивать от UE измерение наблюдаемой временной разности SFN-SFN и информацию временной разности Rx-Tx. UE выдает информацию измерения спутникового псевдоохвата GPS и другую информацию в сеть. При необходимости, UE также выдает на SRNC измерение наблюдаемой временной разности SFN-SFN и информацию временной разности Rx-Tx, а также их метки времени.
[0118] На этапе 1006, SRNC отправляет на SAS сообщение ответа активации положения в формате PCAP. Данное сообщение включает информацию, содержащуюся на этапе 1005.
[0119] На этапе 1007, SAS производит машинное вычисление оценки позиционирования и дополнительной оценки скорости. Если периодический отчет не проводится на этапе 1002, SAS отправляет на SRNC сообщение ответа инициализации положения в формате PCAP. Данное сообщение включает оценку позиционирования и дополнительную оценку скорости и может дополнительно включать информацию способа позиционирования и указание, удовлетворяет ли точность оценки позиционирования требуемой точности. В ином случае, SAS отправляет на SRNC сообщение периодического результата положения в формате PCAP. Данное сообщение включает оценку позиционирования и может дополнительно включать информацию способа позиционирования и указание, удовлетворяет ли точность оценки позиционирования требуемой точности.
[0120] На этапе 1008, если действует способ позиционирования на основе UE, UE выдает оценку позиционирования и дополнительную оценку скорости на SRNC посредством сигнализации RRC. SRNC пересылает оценку позиционирования и дополнительную оценку скорости на SAS посредством проведения оценки позиционирования и дополнительной оценки скорости в сообщении ответа активации положения в формате PCAP. Данное сообщение может дополнительно включать информацию способа позиционирования и указание, удовлетворяет ли точность оценки позиционирования требуемой точности.
[0121] На этапе 1009, SAS может подтверждать оценку позиционирования, выполненную на этапе 1008 (такую как информация CELL_ID). Если периодический отчет не требуется на этапе 1002, SAS отправляет сообщение ответа инициализации положения в формате PCAP на SRNC. Данное сообщение включает оценку позиционирования и дополнительную оценку скорости и может дополнительно включать информацию способа позиционирования и указание, удовлетворяет ли точность оценки позиционирования требуемой точности. Если периодический отчет требуется на этапе 1002, SAS отправляет сообщение периодического результата положения в формате PCAP на SRNC. Данное сообщение включает оценку позиционирования и может дополнительно включать информацию способа позиционирования и указание, удовлетворяет ли точность оценки позиционирования требуемой точности. Если информация оценки позиционирования является недостаточной, SRNC повторно начинает новую процедуру позиционирования с этапа 1003.
[0122] На этапе 1010, SRNC передает информацию позиционирования и дополнительную оценку скорости на CN. Сообщение дополнительно включает способ позиционирования. Если CN требует точности оценки позиционирования, сообщение ответа местоположения включает указание, удовлетворяет ли точность оценки позиционирования требуемой точности.
[0123] Если периодический отчет запрашивается на этапе 1004, UE отправляет один отчет измерения GPS в каждый интервал времени. SRNC пересылает данный отчет измерения на SAS посредством проведения отчета измерения в сообщении периодического отчета положения в формате PCAP. SAS производит машинное вычисление оценки позиционирования и дополнительной оценки скорости, подтверждает вычисленную машинным путем оценку позиционирования и оценку позиционирования, принятую от SRNC, и пересылает информацию позиционирования на SRNC посредством проведения информации позиционирования в сообщении периодического результата положения в формате PCAP. Если информация способа позиционирования может быть получена, SRNC пересылает информацию способа позиционирования на CN. Если CN требует точности позиционирования, сообщение ответа местоположения включает указание, удовлетворяет ли точность оценки позиционирования требуемой точности. Процесс повторяется до тех пор, пока показатели времен отправки оценки позиционирования не удовлетворят требуемым показателям времен. SAS может отправить последнюю информацию позиционирования на SRNC посредством проведения последней информации позиционирования в сообщении ответа инициализации положения в формате PCAP.
[0124] Если периодический отчет не требуется на этапе 1004, но периодический отчет требуется на этапе 1002, SAS повторяет этапы с 1003 по 1010 до тех пор, пока показатели времен отправки оценки позиционирования не удовлетворят требуемым показателям времен или пока CN не прекратит процедуру позиционирования. В последнем запросе на этапе 1008, SAS отправляет на SRNC последний результат позиционирования в сообщении ответа инициализации положения в формате PCAP.
[0125] Выше представлены три базовых способа позиционирования, специфицированные в 3GPP. Они могут быть использованы в различных случаях. Способ позиционирования на основе CELL_ID может быть использован в ситуации, когда требование точности позиционирования является более низким; способ OTDOA может быть использован в ситуации, когда требование точности позиционирования является более высоким, и UE и сеть не обладают приемником GPS; в то время как способ позиционирования на основе GPS используется в ситуации, когда требование точности позиционирования является высоким, и UE и сеть обладают устройством GPS. Дополнительно, данные несколько типов способов позиционирования могут быть использованы смешанным путем одновременно, так чтобы компенсировать недостаточность друг друга. Например, посредством одновременного использования способов позиционирования на основе CELL_ID и OTDOA может быть получен лучший эффект позиционирования в сельских и густонаселенных городских областях. Посредством использования различных способов позиционирования, сеть обеспечивает услуги позиционирования для различных применений и различных пользователей в различных случаях.
[0126] Фиг.11 представляет собой блок-схему последовательности операций содействия, посредством терминала пользователя, обнаружению слепой области в случае, когда в наличии не имеется GPS/OTDOA, а только CELL_ID позиционирование в соответствии с одним вариантом осуществления настоящего изобретения в соответствии со вторым вариантом осуществления настоящего изобретения. Как продемонстрировано на фиг.11, данный способ включает следующие этапы.
[0127] На этапе 1101, MS выполняет процедуру доступа к инициализации сети посредством взаимодействия с обслуживающей BS, которая включает процедуру согласования SBC. Данная процедура согласования SBC включает следующий дополнительный этап. Согласовывается, поддерживают ли MS и сетевая сторона функцию обнаружения слепой области с помощью пользователя, и затем MS присоединяется к сети через обслуживающую BS.
[0128] На этапе 1102, MS в активном состоянии получает информацию, такую как ID обслуживающей BS, через обслуживающую сеть, и передает относящуюся к соседям информацию посредством способа соединения, такую как список ID соседних BS, и выполняет буферизацию связанной с соседями информации.
[0129] На этапе 1103, MS входит в слепую область, то есть, когда принимаемые RSSI, SNR имеют показатели ниже определенного порогового значения, а INR имеет показатель выше определенного порогового значения, MS оценивает, записывает и сохраняет некоторую связанную с этим информацию о слепой области, такую как ID обслуживающей BS, буферизированный до входа в слепую область, а также информацию списка ID соседних BS на это время, и является соединенной со связанной с этим информацией о слепой области.
[0130] На этапе 1104, в случае, как продемонстрировано на фиг.1, то есть, в случае, когда пользователь передвигается от области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия целевой BS, MS оценивает тот факт, что MS входит в сеть с сигналом, через значения обнаружения принятых RSSI, SNR и INR, то есть выходит из слепой области, и MS получает доступ к новой сети и устанавливает соединение. Затем MS отправляет на сетевую сторону информацию о том, что MS производит запись в процессе нахождения в слепой области, и информацию о выходе из слепой области, то есть ID обслуживающей BS до входа в слепую область, список ID соседних BS, или RTD/SNR/RSSI/CINR, и передает их в виде отчета на целевую BS. Целевая BS отправляет принятую отчетную информацию на модуль или устройство обнаружения слепой области и выполняет вычисление слепой области и машинное вычисление местоположения посредством принятия определенного алгоритма (такого как алгоритм CELL_ID позиционирования) с целью получения информации местоположения слепой области.
[0131] В случае, как продемонстрировано на фиг.2, то есть когда пользователь передвигается от области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия обслуживающей BS, в течение процесса передвижения MS, данная MS снова возвращается к области покрытия сигнала обслуживающей BS (такой как обслуживающая BS на фиг.2). В сигнале, после получения связанной с этим информации, MS устанавливает соединение с сетевой стороной. Затем MS получает доступ к сетевой стороне через соединение и взаимодействует, принимая во внимание информацию о слепой области, с обслуживающей BS (такой как обслуживающая BS на фиг.2), то есть с учетом показателей RTD/SNR/RSSI/CINR, возникших до или после входа в слепую область. В итоге, обслуживающая BS отправляет принятую связанную с этим информацию о слепой области на эксклюзивный модуль или эксклюзивное устройство, и выполняет вычисление слепой области, и производит машинное вычисление местоположения посредством принятия определенного алгоритма (такого как алгоритм CELL_ID позиционирования) с целью получения информации местоположения слепой области.
[0132] Алгоритм позиционирования во втором варианте осуществления настоящего изобретения является тем же, что и алгоритм по первому варианту осуществления, и более не описывается.
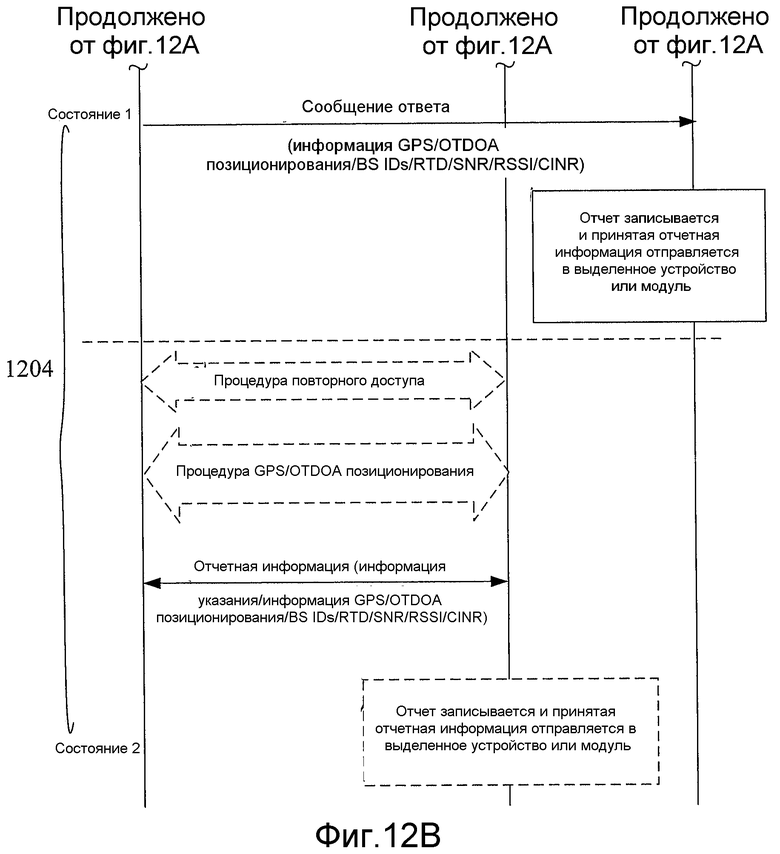
[0133] Фиг.12 демонстрирует процедуру содействия, посредством терминала пользователя, обнаружению информации о слепой области посредством отправки сообщения указания в соответствии с одним вариантом осуществления настоящего изобретения. Как продемонстрировано на фиг.12, данная специфическая процедура включает следующие этапы.
[0134] На этапе 1201, MS выполняет процедуру доступа к инициализации сети через обслуживающую BS, которая включает процедуру согласования SBC. Данная процедура согласования SBC включает следующий дополнительный этап. Согласовывается, поддерживают ли MS и сетевая сторона функцию GPS/OTDOA и поддерживают ли MS и сетевая сторона функцию обнаружения слепой области с помощью пользователя, и затем MS присоединяется к сети через обслуживающую BS.
[0135] На этапе 1202, в активном состоянии, MS, через обслуживающую сеть, получает информацию, такую как ID обслуживающей BS, и передает относящуюся к соседям информацию посредством способа соединения, такую как список ID соседних BS, и/или, если MS периодически выполняет позиционирование, через систему позиционирования получают и сохраняют информацию, такую как последнее GPS/OTDOA позиционирование.
[0136] На этапе 1203, MS входит в слепую область, то есть, когда RSSI и SNR, принятые MS, имеют показатели ниже определенного порогового значения, MS оценивает и записывает некоторую связанную с этим информацию о слепой области, такую как ID обслуживающей BS, буферизированный до входа в слепую область, и/или информацию списка ID соседних BS на это время, и/или информацию последнего позиционирования, и является соединенной со связанной с этим информацией идентификатора слепой области.
[0137] На этапе 1204, в случае, как продемонстрировано на фиг.1, то есть, когда пользователь передвигается от области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия целевой BS, в это время, MS оценивает тот факт, что MS входит в сеть с сигналом, через значения обнаружения принятых RSSI, SNR, то есть выходит из слепой области, и MS получает доступ к сети обслуживающей BS и устанавливает соединение. Затем другие сообщения или выделенное сообщение, отправляемые на сетевую сторону посредством MS, проводят информацию однобитовой индикации, иллюстрирующую, что MS вошла в слепую область ранее и теперь требует передачи в виде отчета связанной с этим информации о слепой области, так чтобы инициировать вход системы в стадию обработки обнаружения слепой области. Затем, в соответствии с некоторой информацией, такой как случай информации слепой области, которую собрали текущие сетевые ресурсы, целевая BS оценивает, требуется ли передача в виде отчета информации о слепой области. Если передача в виде отчета информации о слепой области не требуется, пользователь выполняет обычный обмен данными после специфицированного отрезка времени. Если требуется передача в виде отчета информации о слепой области, целевая BS активно отправляет сообщение запроса на передачу в виде отчета информации о слепой области. Данное сообщение проводит связанный со слепой областью контент, такой как наименования требуемых к передаче параметров, местоположение ресурсов, назначенных для MS с целью передачи в виде отчета информации о слепой области. Затем, если требуемый к передаче посредством MS контент включает информацию позиционирования, его MS и целевая BS или другие соседние BS выполняют одну процедуру GPS/OTDOA позиционирования. После того как информация местоположения MS получена, MS передает в виде отчета, унифицированным путем, требуемую к передаче информацию в сообщении запроса от BS к BS через сообщение ответа. Последовательно, целевая BS отправляет принятую отчетную информацию на модуль или устройство обнаружения слепой области и выполняет вычисление слепой области и машинное вычисление местоположения посредством принятия определенного алгоритма (такого как алгоритм GPS позиционирования, алгоритм OTDOA позиционирования и алгоритм CELL_ID позиционирования) с целью получения информации местоположения слепой области.
[0138] В случае, как продемонстрировано на фиг.2, то есть, когда пользователь передвигается от области покрытия обслуживающей BS к слепой области и затем передвигается к области покрытия обслуживающей BS, в течение процесса передвижения MS, данная MS возвращается в область покрытия сигнала обслуживающей BS (такой как обслуживающая BS на фиг.2), после получения связанной с этим информации в сигнале, MS устанавливает соединение с сетевой стороной. Затем MS получает доступ к сети через соединение и взаимодействует, принимая во внимание информацию, с обслуживающей BS (такой как обслуживающая BS на фиг.2). Затем другие сообщения или выделенное сообщение, отправляемые на сетевую сторону посредством MS, проводят информацию однобитовой индикации, иллюстрирующую, что MS вошла в слепую область ранее и теперь требует передачи в виде отчета связанной с этим информации о слепой области, так чтобы инициировать вход системы в стадию обработки обнаружения слепой области. Затем, в соответствии с некоторой информацией, такой как случай информации слепой области, которую собрали текущие сетевые ресурсы, обслуживающая BS оценивает, является ли необходимым выполнение последовательной процедуры передачи в виде отчета информации о слепой области. Если выполнение последовательной процедуры передачи в виде отчета информации о слепой области не является необходимым, пользователь выполняет обычный обмен данными после специфицированного отрезка времени. Если выполнение последовательной процедуры передачи в виде отчета информации о слепой области является необходимым, обслуживающая BS активно отправляет сообщение запроса на передачу в виде отчета информации о слепой области. Данное сообщение проводит связанный со слепой областью контент, такой как наименования требуемых к передаче параметров (информация RSSI/SNR/CINR/RTD/RSSI/SNR/GPS/OTDOA), и местоположение ресурсов, назначенных для MS с целью передачи в виде отчета информации о слепой области. Затем, если требуемый к передаче посредством MS контент включает информацию GPS/OTDOA позиционирования, MS и целевая BS или другая соседняя BS выполняют одну процедуру позиционирования. После того как информация местоположения MS получена, требуемая к передаче посредством BS, в сообщении запроса, информация передается в виде отчета унифицированным путем на BS через сообщение ответа. Последовательно, обслуживающая BS отправляет принятую отчетную информацию на модуль или устройство обнаружения слепой области и выполняет вычисление слепой области и машинное вычисление местоположения посредством принятия определенного алгоритма (такого как алгоритм GPS позиционирования, алгоритм OTDOA позиционирования и алгоритм CELL_ID позиционирования) с целью получения информации местоположения слепой области.
[0139] В одном варианте осуществления, настоящее изобретение обеспечивает систему для обнаружения слепой области, включающую терминал пользователя и устройство сетевой стороны. Терминал пользователя сконфигурирован с возможностью записи информации обнаружения в промежутке заранее установленного времени, в ситуации передвижения в слепую область, причем данная информация включает ID обслуживающей BS; получения информации о текущей слепой области в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, в ситуации передвижения из слепой области; и передачи в виде отчета полученной информации о слепой области на устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя, после того как терминал пользователя подтвержден посредством устройства сетевой стороны, так чтобы устройство сетевой стороны получило местоположение слепой области. Устройство сетевой стороны сконфигурировано с возможностью выполнения вычисления слепой области и машинного вычисления местоположения в соответствии с принятой информацией о слепой области, переданной в виде отчета терминалом пользователя, подтвержденным сетевой стороной для получения информации о местоположении слепой области. Устройство сетевой стороны представляет собой целевую BS или обслуживающую BS.
[0140] Терминал пользователя включает блок обнаружения слепой области, блок получения информации и буферизации, и блок передачи информации в виде отчета. Блок обнаружения слепой области сконфигурирован с возможностью оценки, входит ли терминал пользователя в слепую область, или передвигается из слепой области. Блок получения информации и буферизации сконфигурирован с возможностью записи информации обнаружения в пределах заранее установленного времени, в случае передвижения в слепую область, причем данная информация включает ID обслуживающей BS; получения информации о текущей слепой области в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, в ситуации передвижения из слепой области. Блок передачи информации в виде отчета сконфигурирован с возможностью передачи в виде отчета информации о слепой области, полученной на устройство сетевой стороны, после того как терминал пользователя подтвержден посредством устройства сетевой стороны, так чтобы устройство сетевой стороны получило местоположение слепой области.
[0141] Терминал пользователя дополнительно включает блок отправки указания, блок приема информации и блок согласования. Блок отправки указания сконфигурирован с возможностью отправки информации указания на устройство сетевой стороны, после того как блок получения информации и буферизации получает информацию о слепой области, так чтобы указывать, что терминал пользователя вошел в слепую область ранее и требует передачи, в виде отчета, связанной с этим информации о слепой области, так чтобы инициировать вход устройства сетевой стороны в процедуру обработки обнаружения слепой области. Блок приема информации сконфигурирован с возможностью приема отправленного посредством устройства сетевой стороны сообщения запроса на передачу, в виде отчета, информации о слепой области, причем данное сообщение проводит связанный с этим контент, требуемый для передачи отчета о слепой области, и о местоположении ресурсов, назначенных терминалу пользователя для передачи информации о слепой области. Блок передачи в виде отчета информации специфически сконфигурирован с возможностью передачи в виде отчета информации о слепой области, полученной посредством блока получения информации и буферизации на устройство сетевой стороны в соответствии с сообщением запроса на передачу в виде отчета информации о слепой области, принятой блоком приема информации. Блок согласования сконфигурирован с возможностью согласования с терминалом пользователя необходимости поддержки функции обнаружения слепой области с использованием пользователя.
[0142] Устройство сетевой стороны включает блок приема отчетной информации, блок машинного вычисления местоположения, блок оценки и блок согласования. Блок приема отчетной информации сконфигурирован с возможностью приема отчетной информации, отправленной посредством терминала пользователя. Блок машинного вычисления местоположения сконфигурирован с возможностью выполнения вычисления слепой области и машинного вычисления местоположения в соответствии с принятой информацией, переданной в виде отчета посредством терминала пользователя с целью получения информации о местоположении слепой области. Блок оценки сконфигурирован с возможностью оценки, требуется ли передача в виде отчета информации о слепой области, и выполнения обычного обмена данными в ситуации, если передача в виде отчета информации о слепой области не требуется, или отправки на UE сообщения запроса на передачу в виде отчета информации о слепой области в ситуации, если требуется передача в виде отчета информации о слепой области, причем данное сообщение отправки может проводить связанный с этим контент, такой как местоположение ресурсов, назначенных для отчетного сообщения. Блок согласования сконфигурирован с возможностью согласования с UE необходимости поддержки функции обнаружения слепой области с использованием пользователя.
[0143] В вариантах осуществления настоящего изобретения, позиционирование местоположения слепой области осуществляется через обратную связь UE, и для оператора сети обеспечивается информационная опора для последовательной организации BS, так чтобы сетевой оператор был освобожден от измерения трассы с целью обнаружения слепой области, затраты сетевого оператора экономятся, общее сетевое покрытие гарантируется и можно избежать проблемы перегрузки, как можно избежать и случая накопления от приема передающей отчет ячейкой той же или схожей отчетной информации от различных терминалов, путем отказа от отчета UE посредством политики обнаружения слепой области.
[0144] Через описания вышеуказанных вариантов осуществления, специалисты в области техники могут понять, что настоящее изобретение может быть выполнено посредством только аппаратного оборудования или посредством программного обеспечения и необходимой универсальной платформы аппаратного оборудования. На основе таких соображений, техническое решение по настоящему изобретению может быть осуществлено в форме программного продукта. Данный программный продукт может быть сохранен в энергонезависимой (долговременной) среде хранения (на носителе) (CD-ROM, USB диске и съемном жестком диске). Программный продукт включает в себя некоторое количество инструкций, обеспечивающих для компьютерного устройства (персонального компьютера, сервера или сетевого устройства) возможность выполнения способа, обеспеченного в каждом варианте осуществления настоящего изобретения.
[0145] В заключении, вышеуказанные варианты осуществления представляют собой только некоторые иллюстративные (примерные) варианты осуществления настоящего изобретения, но не предназначены ограничивать объем настоящего изобретения. Является очевидным, что специалисты в области техники могут производить различные модификации и вариации настоящего изобретения, не выходя из объема настоящего изобретения.
Изобретение относится к беспроводной связи. Предложен способ для обнаружения зоны отсутствия приема, содержащий этапы, когда терминал пользователя передвигается в зону отсутствия приема, терминал пользователя записывает информацию о местоположении для последнего момента времени терминала пользователя перед входом в зону отсутствия приема; когда терминал пользователя передвигается из зоны отсутствия приема, терминал пользователя получает информацию о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен. Терминал пользователя передает, в виде отчета, полученную информацию о зоне отсутствия приема в устройство сетевой стороны. Технический результат заключается в улучшении качества обслуживания пользователей и экономии затрат сетевого оператора. 5 н. и 11 з.п. ф-лы, 14 ил.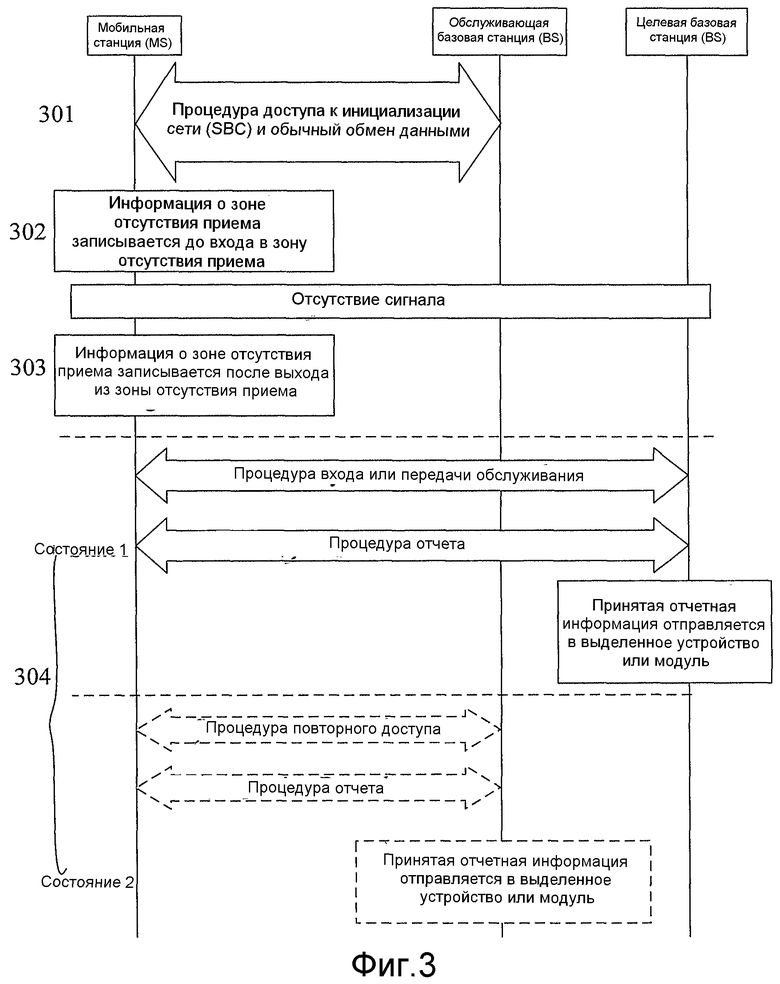
1. Способ обнаружения зоны отсутствия приема, содержащий этапы, на которых
записывают посредством терминала пользователя информацию обнаружения в ситуации, если терминал пользователя передвигается в зону отсутствия приема, причем информация обнаружения представляет собой информацию о местоположении для последнего момента времени терминала пользователя перед входом в зону отсутствия приема;
получают посредством терминала пользователя информацию о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, в ситуации, если терминал пользователя передвигается из зоны отсутствия приема, причем информация измерения представляет собой информацию о текущем местоположении терминала пользователя; и
передают в виде отчета посредством терминала пользователя полученную информацию о зоне отсутствия приема в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя, с целью обеспечения для данного устройства сетевой стороны возможности получения местоположения зоны отсутствия приема, если устройство сетевой стороны определит, что требуется передача в виде отчета информации о зоне отсутствия приема.
2. Способ обнаружения зоны отсутствия приема по п.1, в котором передача в виде отчета посредством терминала пользователя полученной информации о зоне отсутствия приема в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя, с целью обеспечения для данного устройства сетевой стороны возможности получения местоположения зоны отсутствия приема, если устройство сетевой стороны определит, что требуется передача в виде отчета информации о зоне отсутствия приема, содержит этапы, на которых
устанавливают посредством терминала пользователя соединение с устройством сетевой стороны после того, как сигнал восстановлен;
отправляют посредством терминала пользователя информацию указания в устройство сетевой стороны, так, чтобы указать, что терминал пользователя вошел в зону отсутствия приема ранее, и требует передачи в виде отчета информации о зоне отсутствия приема;
оценивают посредством устройства сетевой стороны, требуется ли передача в виде отчета информации о зоне отсутствия приема, и если передача в виде отчета информации о зоне отсутствия приема требуется, отправляют в терминал пользователя сообщение запроса на передачу в виде отчета информации о зоне отсутствия приема, причем данное сообщение сообщает местоположение ресурсов, назначенных терминалу пользователя для передачи в виде отчета информации о зоне отсутствия приема;
передают в виде отчета в устройство сетевой стороны посредством терминала пользователя требуемую устройством сетевой стороны информацию о зоне отсутствия приема через сообщение ответа; и
выполняют посредством устройства сетевой стороны вычисление зоны отсутствия приема и машинное вычисление местоположения в соответствии с информацией о зоне отсутствия приема, переданной в виде отчета посредством терминала пользователя для получения информации о местоположении зоны отсутствия приема.
3. Способ обнаружения зоны отсутствия приема по п.1, в котором передача в виде отчета посредством терминала пользователя полученной информации о зоне отсутствия приема в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя, с целью обеспечения для данного устройства сетевой стороны возможности получения местоположения зоны отсутствия приема, если устройство сетевой стороны определит, что требуется передача в виде отчета информации о зоне отсутствия приема, содержит этапы, на которых
устанавливают посредством терминала пользователя соединение с устройством сетевой стороны после того, как сигнал найден;
инициируют посредством терминала пользователя запрос позиционирования в устройство сетевой стороны для получения от устройства сетевой стороны информации о текущем местоположении терминала пользователя; и
передают в виде отчета в устройство сетевой стороны посредством терминала пользователя записанную информацию обнаружения до входа в зону отсутствия приема и информацию текущего местоположения терминала пользователя после того, как терминал пользователя подтвержден посредством устройства сетевой стороны, и выполняют посредством устройства сетевой стороны вычисление зоны отсутствия приема и машинное вычисление местоположения в соответствии с принятой информацией, переданной в виде отчета посредством терминала пользователя для получения информации о местоположении зоны отсутствия приема.
4. Способ обнаружения зоны отсутствия приема по п.1, дополнительно содержащий этап, на котором
оценивают посредством терминала пользователя, передвигаться ли из зоны отсутствия приема в соответствии с индикатором уровня принимаемого сигнала (RSSI), отношением сигнал-шум (SNR) и отношением помеха-шум (INR).
5. Способ обнаружения зоны отсутствия приема по п.1, в котором до записи посредством терминала пользователя информации обнаружения данный способ дополнительно содержит этап, на котором согласуют посредством терминала пользователя с устройством сетевой стороны, поддерживают ли обе стороны функцию обнаружения зоны отсутствия приема с помощью пользователя.
6. Способ обнаружения зоны отсутствия приема по п.3, в котором устройство сетевой стороны получает информацию о текущем местоположении терминала пользователя посредством способа позиционирования.
7. Способ обнаружения зоны отсутствия приема по п.6, в котором способ позиционирования содержит
позиционирование с использованием глобальной системы позиционирования (GPS), позиционирование с использованием наблюдаемой разности моментов времени прихода сигналов (OTDOA) или CELL_ID позиционирование.
8. Способ обнаружения зоны отсутствия приема по п.2 или 3, в котором устройство сетевой стороны представляет собой целевую базовую станцию (целевую BS) или обслуживающую базовую станцию (обслуживающую BS).
9. Система для обнаружения зоны отсутствия приема, содержащая
терминал пользователя, сконфигурированный с возможностью записи информации обнаружения, если терминал пользователя передвигается в зону отсутствия приема, причем информация обнаружения представляет собой информацию о местоположении для последнего момента времени терминала пользователя перед входом в зону отсутствия приема; получения информации о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, если терминал пользователя передвигается из зоны отсутствия приема, причем информация измерения представляет собой информацию о текущем местоположении терминала пользователя; и передачи в виде отчета полученной информации о зоне отсутствия приема в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя с целью обеспечения устройству сетевой стороны возможности получения местоположения зоны отсутствия приема, если устройство сетевой стороны определит, что требуется передача в виде отчета информации о зоне отсутствия приема; и
устройство сетевой стороны, сконфигурированное с возможностью выполнения вычисления зоны отсутствия приема и машинного вычисления местоположения в соответствии с информацией о зоне отсутствия приема, переданной в виде отчета терминалом пользователя для получения информации о местоположении зоны отсутствия приема.
10. Терминал пользователя, содержащий
блок получения и буферизации информации, сконфигурированный с возможностью записи информации обнаружения, если терминал пользователя передвигается в зону отсутствия приема, причем информация обнаружения представляет собой информацию о местоположении для последнего момента времени терминала пользователя перед входом в зону отсутствия приема; а также получения информации о зоне отсутствия приема в соответствии с записанной информацией обнаружения и информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, если терминал пользователя передвигается из зоны отсутствия приема, причем информация измерения представляет собой информацию о текущем местоположении терминала пользователя; и
блок передачи информации, сконфигурированный с возможностью передачи в виде отчета информации о зоне отсутствия приема, полученной посредством блока получения информации и буферизации, в устройство сетевой стороны, обеспечивающее обслуживание для терминала пользователя с целью обеспечения устройству сетевой стороны возможности получения местоположения зоны отсутствия приема, если устройство сетевой стороны определит, что требуется передача в виде отчета информации о зоне отсутствия приема.
11. Терминал пользователя по п.10, дополнительно содержащий блок отправки указания и блок приема информации, причем блок отправки указания сконфигурирован с возможностью отправки информации указания в устройство сетевой стороны после того, как блок получения и буферизации информации получает информацию о зоне отсутствия приема, так чтобы указать, что терминал пользователя вошел в зону отсутствия приема ранее и требует передачи в виде отчета связанной с этим информации о зоне отсутствия приема;
блок приема информации сконфигурирован с возможностью приема отправленного посредством устройства сетевой стороны сообщения запроса на передачу в виде отчета информации о зоне отсутствия приема, причем данное сообщение запроса сообщает местоположение ресурсов, назначенных терминалу пользователя для передачи в виде отчета информации о зоне отсутствия приема;
блок передачи информации специфически сконфигурирован с возможностью передачи в виде отчета информации о зоне отсутствия приема, полученной посредством блока получения и буферизации информации, в устройство сетевой стороны в соответствии с сообщением запроса на передачу в виде отчета информации о зоне отсутствия приема, принятой посредством блока приема информации.
12. Устройство сетевой стороны, содержащее
блок приема отчетной информации, сконфигурированный с возможностью приема информации о зоне отсутствия приема, передаваемой в виде отчета посредством терминала пользователя;
блок машинного вычисления местоположения, сконфигурированный с возможностью выполнения вычисления зоны отсутствия приема и машинного вычисления местоположения в соответствии с информацией о зоне отсутствия приема, принятой посредством блока приема отчетной информации для получения информации о местоположении зоны отсутствия приема; и
блок оценки, сконфигурированный с возможностью оценки, требуется ли передача в виде отчета информации о зоне отсутствия приема, и отправки сообщения запроса на передачу в виде отчета информации о зоне отсутствия приема в терминал пользователя, если передача в виде отчета информации о зоне отсутствия приема требуется, причем данное сообщение запроса сообщает информацию о местоположении ресурсов, назначенных терминалу пользователя для передачи в виде отчета информации о зоне отсутствия приема.
13. Способ обнаружения зоны отсутствия приема, содержащий этапы, на которых
получают посредством терминала пользователя информацию о зоне отсутствия приема в соответствии с информацией измерения, полученной посредством обнаружения, когда сигнал восстановлен, если терминал пользователя передвигается из зоны отсутствия приема, причем информация измерения представляет собой информацию о текущем местоположении терминала пользователя; и
передают в виде отчета посредством терминала пользователя полученную информацию о зоне отсутствия приема в устройство сетевой стороны для предоставления устройству сетевой стороны возможности получения местоположения зоны отсутствия приема, если устройство сетевой стороны определит, что требуется передача в виде отчета информации о зоне отсутствия приема.
14. Способ обнаружения зоны отсутствия приема по п.13, дополнительно содержащий этап, на котором
записывают посредством терминала пользователя информацию обнаружения, если терминал пользователя передвигается в зону отсутствия приема, причем данная информация обнаружения содержит идентификатор обслуживающей BS.
15. Способ обнаружения зоны отсутствия приема по п.14, дополнительно содержащий этап, на котором
записывают посредством терминала пользователя информацию обнаружения в пределах заранее установленного времени, причем информация обнаружения представляет собой информацию о местоположении для последнего момента времени терминала пользователя перед входом в зону отсутствия приема.
16. Способ обнаружения зоны отсутствия приема по п.14, в котором полученная информация о зоне отсутствия приема содержит информацию измерения и информацию обнаружения.
| ЕР 1558046 А1, 27.07.2005 | |||
| ЕР 1558049 А2, 27.07.2005 | |||
| RU 2006103993 A, 17.06.2006 | |||
| US 2004203855 А1, 14.10.2004. |

