Изобретение относится к транспорту для перевозки пассажиров в городской (урбанизированной) среде на электрической канатной тяге.
Известна система канатных дорог фунитель (Funitel). Система устойчива к ветровым нагрузкам и допускает работу при скорости ветра свыше 100 км/час. Наличие двух несуще-тяговых канатов, расположенных на расстоянии 3,2 м друг от друга, позволяет значительно увеличить пролеты между опорами. Специальная пневматическая подвеска кабины, рассчитанная на 24 пассажира, позволяет обеспечить максимальный комфорт во время движения. При скорости до 7,5 м/с достигается пропускная способность 3200-4000 чел./час (www.skado.ru/?id=269).
При большой длине канатной дороги происходит неравномерное вытягивание и проскальзывание каждой нити несуще-тягового каната на приводных шкивах трения, следовательно, перекашиваются пассажирские вагоны, закрепленные за канат через отцепляемые зажимы. Этот недостаток значительно снижает безопасность, приводит к остановке дороги на длительный период. Пневматическая подвеска увеличивает массу пассажирских вагонов, но не снижает динамических нагрузок при движении их через ролики балансиров на опорах, чем ухудшает безопасность при увеличении скорости движения.
Известна конструкция городской канатной дороги, состоящей из концевых и промежуточных станций, соединенных между собой путями из одного тягового и двух несущих канатов с подвешенными на них пассажирскими вагонами через специальные тележки, приводимые в движение тяговым канатом посредством привода. Станции оборудованы конвейерами для пассажирских вагонов, а между станциями установлены промежуточные опоры с балансирами, на которые опираются стальные канаты, высота закрепления которых варьируется в зависимости от рельефа местности и высоты строений, расположенных под путями движения. Канатная дорога дополнительно оснащена пересадочными станциями, и все станции установлены на арочных опорах над проезжими частями улиц с сохранением под ними габаритов для движения городского автотранспорта и соединенными со всеми станциями в каждом направлении двумя независимыми путями из двух несущих и тягового канатов. Пассажирские вагоны приводятся в движение тяговым канатом посредством дискретных приводов. Тяговый канат опирается на ролики балансиров, часть которых входит в кинематическую цепь дискретных приводов, а конвейеры пересадочных станций оборудованы системой переадресации пассажирских вагонов на другие пути движения (патент РФ №2381931, зарегистрирован в Госреестре изобретений, РФ 20.02.2010 МПК В61В 7/00). Эта конструкция частично повышает надежность и безопасность, снижает шум и вибрацию в пассажирских вагонах и на станциях.
Однако тяговые канаты и зажимы обеспечивают недостаточную безопасность, т.к. в конструкции всего один тяговый канат, приводящий в движение пассажирский вагон, и один удерживающий зажим. При движении пассажирских вагонов через ролики балансиров, часть которых входит в кинематическую цепь дискретных приводов, наблюдается динамическая составляющая, ограничивающая относительную скорость движения и создающая дискомфорт пассажирам, находящимся в вагоне. Система переадресации пассажирских вагонов выполнена в виде конвейеров с жестким маршрутом движения. Изменение маршрута или времени остановки вагонов на станциях требует механической перестройки конвейеров. Отсутствует автоматическая, быстро изменяемая по маршруту и времени система управления.
В дискретном приводе, содержащем один или более мехатронных движителей в виде модуля движения, отсутствует иерархическая система управления, что не дает возможность быстро переорганизовать режим работы канатной дороги.
Наиболее близкой по конструктивным особенностям, технической сущности и достигаемому результату к данному изобретению является городская канатная дорога (Патент РФ №2412840, зарегистрированный в Госреестре изобретений РФ 27.02.2011 г., МПК В61В 7/00, авторов Короткий А.А., Короткий Д.А., Маслов В.Б., Маслов Д.В., Кирсанов М.В., Панфилов А.В.).
Городская канатная дорога содержит концевые и промежуточные пассажирские станции, соединенные между собой путями, состоящими из тягового и несущего стальных канатов, на которых посредством каретки, колес и отцепляемого зажима подвешены пассажирские вагоны, приводимые в движение тяговым канатом посредством привода. Концевые и промежуточные пассажирские станции оборудованы конвейерами для остановки пассажирских вагонов, а между станциями установлены промежуточные опоры с системой роликовых балансиров, оборудованной ловителями и блокировочными устройствами. Высота закрепления промежуточной опоры варьируется в зависимости от рельефа местности и высоты строений, расположенных под путями движения. Привод выполнен дискретным, содержащим мехатронные движители, у которых все двигатели имеют один блок управления и соединены между собой по принципу электрического вала. Городская канатная дорога снабжена пересадочными станциями, установленными на арочные опоры над проезжими частями улиц с сохранением под ними габаритов для движения городского автотранспорта, оборудованными конвейерами с системой механической переадресации пассажирских вагонов на другие пути движения и соединенными со всеми станциями, в каждом направлении, не менее чем двумя независимыми путями, состоящими из одного и более тяговых и несущих канатов. На путях между промежуточными опорами установлены подвесные опоры, содержащие раму, один или более зажимов, охватывающих с двух сторон несущие канаты, и один или более поддерживающих канатных блоков для тяговых канатов. Тяговые канаты опираются на эластичные замкнутые тяговые органы мехатронных движителей дискретного привода, установленные на промежуточных опорах. Кинематическая цепь мехатронного движителя содержит один или более двигателей, рабочий тормоз, шарниры равных угловых скоростей, систему роликовых балансиров, в которой хотя бы один из роликов одного из балансира снабжен аварийным тормозом. В кинематическую цепь мехатронного движителя входит эластичный замкнутый тяговый орган, который огибает все ролики системы балансиров подвешенной к промежуточным опорам посредством шарнирно-сочлененной конструкции, оснащенной демпферной системой.
Эта конструкция имеет следующие недостатки:
- наличие в конструкции всего одного тягового каната, приводящего в движение пассажирский вагон, и одного удерживающего зажима не достаточно с точки зрения резервирования и безопасности;
- работа городской канатной дороги ограничена недостаточной надежностью эластичного тяговою органа и ограниченной по величине удельной нагрузкой между канатом и эластичным тяговым органом, а также изменяющимся коэффициентом трения эластичного замкнутого тягового органа, зависящего от состояния окружающей среды;
- эластичный замкнутый тяговый орган, входящий в cocтав мехатронного движителя, имеет недостаточную износостойкость, испытывая большие нагрузки при фрикционном движении каната, что требует постоянного контроля и своевременных замен;
- на концевых и промежуточных станциях установлены громоздкие механические конвейерные системы остановки, разгона и торможения, что не позволяет быстро изменять скорость и ускорение, а также гибко производить переадресацию на другие маршруты движения пассажирских вагонов на пересадочных станциях.
Задачей изобретения является повышение эффективности городской канатной дороги путем дополнительного резервирования несуще-тягового каната, комфортности и производительности - скорости движения, тяговой способности, а также расширение функциональной способности станций по управлению движением - разгон, торможение, остановка пассажирских вагонов, в том числе по выбору маршрутов движения - выбор платформ, переадресация на другие пути на пересадочных станциях.
Поставленная задача решается благодаря тому, что городская канатная дорога, содержащая концевые, промежуточные, пересадочные станции, соединенные между собой путями, установленными на опорах над проезжими частями улиц с сохранением под ними габаритов для движения городского автотранспорта и проходящими над городской застройкой, каждый путь выполнен в виде двух и более нитей одного кольцевого несуще-тягового каната; дискретный привод, содержащий один или более мехатронных движителей в виде модуля движения с иерархической системой управления, при этом кинематическая цепь каждою модуля движения содержит один или более электрических двигателей, каждый из которых соединен с приводным шкивом трения, рабочего и аварийного тормозов; двух и более последовательно установленных через демпферы и пружины разной жесткости демпферных шарнирно-сочлененных систем роликовых балансиров, расположенных в одной плоскости вдоль нитей несуще-тягового каната; одна из нитей поочередно в шахматном порядке огибает приводные шкивы трения каждого модуля движения, расположенные вне зоны движения каретки пассажирского вагона; при этом каждая каретка дополнительно оснащена мехатронным модулем движения привода колес и отцепляемыми зажимами по количеству, не менее чем число нитей несуще-тягового каната; отцепляемые зажимы выполнены в виде шарнирно сочлененных звеньев, подвижное звено каждого из которых взаимодействует на промежуточных опорах с направляющими, задающими траекторию и время срабатывания зажима; источники питания расположены в пассажирских вагонах; система переадресации пассажирских вагонов содержит один и более жестких путей с троллеями и автоматическими стрелками, взаимодействующими на станциях с мехатронными модулями движения привода колес каретки.
Между совокупностью существенных признаков заявляемой канатной доги и достигаемым техническим результатом существует причинно-следственная связь, а именно:
1. Каждый путь выполнен в виде двух и более нитей одного кольцевого несуще-тягового каната, на котором, через каретки и отцепляемые зажимы с количеством не менее чем число нитей несуще-тягового каната, подвешены пассажирские вагоны. Такое исполнение позволяет создать резервирование системы «несуще-тяговый канат - пассажирские вагоны». Параллельные нити несуще-тягового каната постоянно связаны между собой отцепляемыми зажимами в пролетах между опорами. Один из отцепляемых зажимов, на которых висит пассажирский вагон, в шахматном порядке теряет жесткую связь с одной из нитей несуще-тягового каната на дискретном приводе (на незначительный промежуток времени) в момент отклонения его на приводной шкив трения. При выходе этой же нити несуще-тягового каната со шкива трения свободный отцепляемый зажим жестко захватывает нить. Расстояние между процессом «отцепка-захват» нити несуще-тягового каната равна не более 10-15 диаметров нити. Отцепляемые зажимы выполнены в виде шарнирно сочлененных звеньев. Подвижное звено каждого отцепляемого зажима взаимодействует на промежуточных опорах с направляющими, задающими траекторию и время его срабатывания. Благодаря такой конструкции в случае обрыва одной из нитей несуще-тягового каната пассажирские вагоны всей городской канатной дороги останутся в висячем положении, достигается резервирование, а следовательно, повышается безопасность.
2. Шарнирно-сочлененная система, расположенная в одной плоскости вдоль нитей несуще-тягового каната, оснащенная двумя и более последовательно установленными через пружины разной жесткости и демпфера роликовые балансиры, позволяет подобрать требуемые динамические характеристики, обеспечивающие плавность движения пассажирских вагонов при заходе (выходе) на(с) промежуточные опоры и станции. Система роликовых балансиров в виде шарнирных соединений различной жесткости в одной плоскости позволяет оптимизировать (управлять) динамические нагрузки при относительном движении вагонов. В конечном итоге повышается комфортность для пассажиров, возможность увеличить скорость движения вагонов и, как следствие, повысить производительность канатной дороги в целом.
3. Дискретный привод, содержащий один или более мехатронных движителей в виде модуля движения, у которого кинематическая цепь каждого модуля движения содержит один или более электрических двигателей, каждый из которых соединен с приводным шкивом трения, позволяет практически неограниченно увеличить тяговую способность за счет количества приводных шкивов трения. Кинематическая цепь модуля движения содержит рабочий и аварийный тормоза, при этом одна из нитей несуще-тягового каната поочередно, в шахматном порядке, огибает приводные шкивы трения каждого модуля движения, расположенные вне зоны движения каретки пассажирского вагона. За счет количества приводных шкивов и схемы запасовки нитей несуще-тягового каната в каждом модуле движения возможно практически неограниченно увеличить угол охвата нитью футерованных приводных шкивов трения одного модуля движения, а следовательно, и его тяговую способность. Диаметр приводных шкивов и тяговая способность определяются расчетным путем и зависят от диаметра и конструкции применяемого несуще-тягового каната, производительности городской канатной дороги (количества и вместимости пассажирских вагонов) и профиля ее трассы.
4. Иерархическая система управления модулями движения несуще-тягового каната позволяет синхронизировать работу мехатронных движителей, а также обеспечивать взаимодействие их (по скорости) с мехатронными модулями движения привода колес пассажирского вагона при входе (выходе) со станций. При подходе (выходе) к станции подается автоматический сигнал на пассажирский вагон, где установлен источник питания, который приводит в движение мехатронный модуль движения привода колес. Колеса приводятся в движение в холостом режиме до скорости, равной линейной скорости движения пассажирского вагона. В момент захода на станцию колеса соприкасаются с жесткими путями и контактируют с троллеями. В этот момент происходит открытие всех отцепляемых зажимов, движение пассажирского вагона продолжается по жестким путям, а управление и питание мехатронным модулем движения привода колес на станции осуществляется через троллеи.
5. Система переадресации пассажирских вагонов, содержащая один и более жестких путей с троллеями и автоматическими стрелками, взаимодействующими на станциях с мехатронными модулями движения привода колес каретки, позволяет совместно с иерархической системой управления расширить функциональные возможности станции по управлению движением (разгон, торможение, остановка) пассажирских вагонов, в том числе и по выбору маршрутов движения (выбор платформ, переадресация на другие пути).
Сущность предлагаемого изобретения поясняется чертежами:
- на фиг.1 представлена схема городской канатной дороги;
- на фиг.2 - схема мехатронного модуля движения несуще-тягового каната;
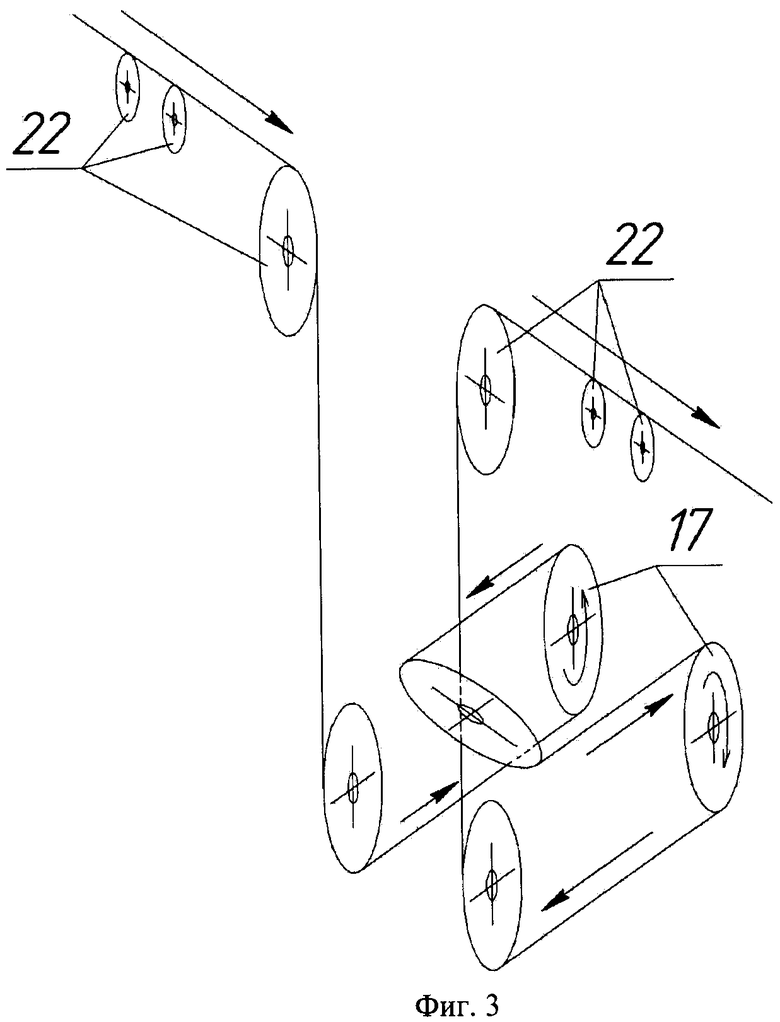
- на фиг.3 - схема запасовки нити несуще-тягового каната на мехатронный модуль движения;
- на фиг.4 - схема мехатронного модуля движения пассажирского вагона;
- на фиг.5 - схема функциональной связи иерархической системы управления.
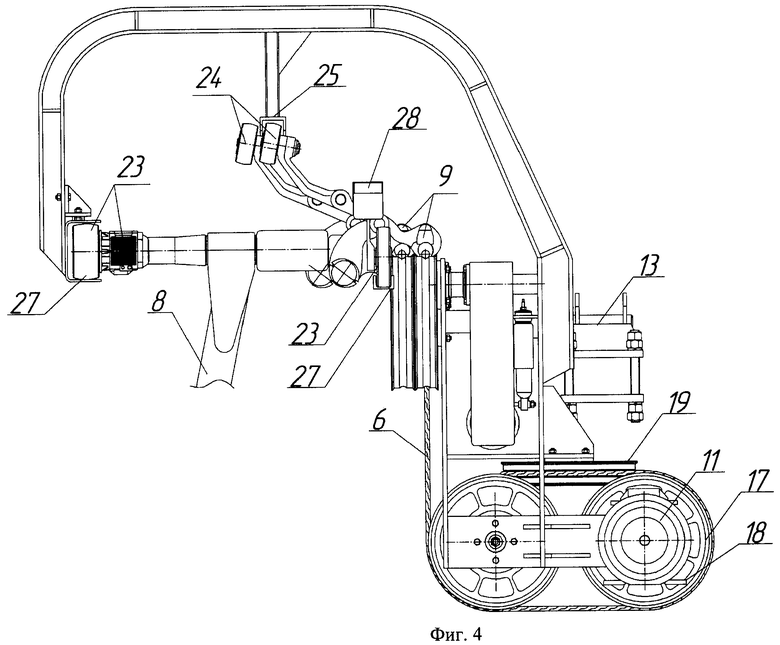
Городская канатная дорога содержит концевые 1, промежуточные 2, пересадочные станции 3, соединенные между собой путями 4, установленными на опорах 5 над проезжими частями улиц с сохранением под ними габаритов для движения городского автотранспорта и проходящие над городской застройкой. Каждый путь выполнен в виде двух и более нитей 6 одного кольцевого несуще-тягового каната. Кольцевой несуще-тяговый канат представляет собой n-е количество петель замкнутого несуще-тягового каната. Пассажирские вагоны 7, подвешенные к нитям 6 одного кольцевого несуще-тягового каната через каретки 8 посредством отцепляемых зажимов 9, приводятся в движение нитями 6 одного кольцевого несуще-тягового каната от дискретных приводов 10, содержащих один или более мехатронных движителей в виде модуля движения 11, входящих в кинематическую цепь демпферной шарнирно-сочлененной системы роликовых балансиров 12, установленных на промежуточных опорах 13. Система переадресации 14 пассажирских вагонов 7, установленная на промежуточных 2 и пересадочных 3 станциях, оснащена иерархической системой управления 15. Кинематическая цепь каждого модуля движения 11 содержит один или более электрических двигателей 16, каждый из которых соединен с приводным шкивом трения 17, рабочего 18 и аварийного 19 тормозов. Демпферная шарнирно-сочлененная система роликовых балансиров 12 содержит два и более последовательно установленные через пружины 20 и демпферы 21 разной жесткости роликовые балансиры 22, расположенные в одной плоскости вдоль нитей 6 одного кольцевого несуще-тягового каната. Одна из нитей 6 одного кольцевого несуще-тягового каната поочередно в шахматном порядке огибает приводные шкивы трения 17 каждого модуля движения 11, расположенные вне зоны движения каретки 8 пассажирского вагона 7. Количество приводных шкивов трения 17 в каждом модуле движения 11 зависит от требуемой тяговой способности конкретной канатной дороги. За счет количества приводных шкивов трения 17 и схемы запасовки нитей 6 одного кольцевого несуще-тягового каната в каждом модуле движения 11 возможно практически неограниченно увеличить угол охвата нитью 6 одного кольцевого несуще-тягового каната футерованных приводных шкивов трения 17 одного модуля движения 11. Диаметр приводных шкивов трения 17 и тяговая способность определяются расчетным путем и зависят от диаметра и конструкции применяемого несуще-тягового каната, производительности городской канатной дороги (количества и вместимости пассажирских вагонов) и профиля ее трассы. Каждая каретка 8 дополнительно оснащена мехатронным модулем движения привода колес 23 и отцепляемыми зажимами 9 по количеству, не менее чем число нитей 6 одного кольцевого несуще-тягового каната. Отцепляемые зажимы 9 выполнены в виде шарнирно сочлененных звеньев, подвижное звено 24 каждого из которых взаимодействует на промежуточных опорах 13 с направляющими 25, задающими траекторию и время срабатывания отцепляемого зажима 9. В пассажирских вагонах 7 расположены источники питания 26. Система переадресации 14 пассажирских вагонов 7 содержит один и более жестких путей 27 с троллеями 28 и автоматическими стрелками 29, взаимодействующими на станциях 1, 2, 3 с мехатронными модулями движения привода колес 23 каретки 8.
Процесс работы городской канатной дороги можно разбить на четыре этапа:
1) выезд пассажирского вагона со станций на путь;
2) движение пассажирского вагона через промежуточную опору, где установлен дискретный привод;
3) въезд пассажирского вагона на станцию с пути;
4) движение пассажирского вагона по станции.
Первый этап. Пассажиры на станциях движутся на соответствующую платформу, где рассаживаются в пассажирские вагоны 7. Пассажирские вагоны 7 с помощью мехатронного модуля движения привода колес 23 каретки 8 под управлением частотного преобразователя, получающего питание по троллеи 28, плавно разгоняются по жестким путям 27 до скорости движения нитей 6 одного кольцевого несуще-тягового каната. В этот момент подвижные звенья 24 отцепляемых зажимов 9 взаимодействуют с направляющей 25, происходит жесткое зацепление отцепляемых зажимов 9 с нитями 6 одного кольцевого несуще-тягового каната. Троллеи 28 размыкаются, и, пройдя проверку, что отцепляемые зажимы 9 закрылись, пассажирский вагон 7 выдвигается на путь 4, иначе, по жестким путям 27 с использованием автоматических стрелок 29 снимается с пути 4.
Второй этап. Движение нитей 6 одного кольцевого несуще-тягового каната по путям 4 создается мехатронными движителями в виде модуля движения 11, установленными на промежуточных опорах 13. Нити 6, опираясь на демпферную шарнирно-сочлененную систему роликовых балансиров 12, придают ей выпуклую (вогнутую) форму, зависящую от профиля пути 4. При подходе пассажирского вагона 7 к демпферной шарнирно-сочлененной системе роликовых балансиров 12 последовательно установленные пружины 20 разной жесткости роликовых балансиров 22 принимают форму волны впереди идущей нити 6 одного кольцевого несуще-тягового каната. Демпферы 21 гасят автоколебания нити 6 одного кольцевого несуще-тягового каната в процессе его движения. Одна из нитей 6 одного кольцевого несуще-тягового каната в движении поочередно в шахматном порядке огибает приводные шкивы трения 17 каждого модуля движения 11. Приводные шкивы трения 17 приводятся во вращение от одного или более электрических двигателей 16, управляемых частотным преобразователем (не показан), установленным на промежуточной опоре 13. Каждый частотный преобразователь модуля движения 11 функционально встроен в иерархическую систему управления 15. Кинематическая цепь модуля движения 11 содержит рабочий 18 и аварийный 19 тормоза.
При аварийной остановке канатной дороги торможение и остановка нитей 6 одного кольцевого несуще-тягового каната осуществляется приводными шкивами трения 17 за счет рекуперации электрическими двигателями 16 мехатронного модуля движения 11 рабочими 18 и аварийными 19 тормозами.
Пассажирский вагон 7, подвешенный к нитям 6 одного кольцевого несуще-тягового каната, через каретки 8 посредством отцепляемых зажимов 9 плавно затягивается на демпферную шарнирно-сочлененную систему роликовых балансиров 12. Подвижное звено 24 одного из отцепляемых зажимов 9 взаимодействует на промежуточных опорах 13 с направляющей 25, задающей траекторию и время его раскрытия (происходит «отцепка» отцепляемого зажима 9 от нити 6 одного кольцевого несуще-тягового каната). В момент раскрытия отцепляемого зажима 9 нить 6 одного кольцевого несуще-тягового каната отклоняется на блоке (не обозначен) и попадает на приводной шкив трения 17. В зависимости от запасовки нити 6 одного кольцевого несуще-тягового каната количество приводных шкивов трения 17 может быть неограниченно. Проходя через приводные шкивы трения 17 и другой отклоняющий блок (не обозначен), нить 6 одного кольцевого несуще-тягового каната возвращается в исходное прямолинейное положение. При выходе этой же нити 6 с приводных шкивов трения 17 и другой отклоняющий блок (не обозначен) то же подвижное звено 24, съезжая с направляющей 25, захватывает жестко нить 6 (происходит «захват» отцепляемым зажимом 9 нити 6 одного кольцевого несуще-тягового каната). Расстояние между процессом «отцепка-захват» нити 6 одного кольцевого несуще-тягового каната равна не более 10-15 диаметров нити 6. При этой операции на одной из нитей 6 одного кольцевого несуще-тягового каната создается тяговое усилие, способствующее перемещению пассажирских вагонов 7. При прохождении промежуточной опоры 13 тяговое усилие создается только от одной нити 6 одного кольцевого несуще-тягового каната, которая огибает приводные шкивы трения 17. Другие нити 6 одного кольцевого несуще-тягового каната проходят демпферную шарнирно-сочлененную систему роликовых балансиров 12 без отклонения с жестко зажатыми отцепляемыми зажимами 9, и дальнейшее устойчивое движение пассажирского вагона 7 осуществляется с помощью этих нитей 6 одного кольцевого несуще-тягового каната, оставшегося в зацеплении, вторым отцепляемым зажимом 9 продолжающего движение в плоскости движения пассажирского вагона 7. На другой промежуточной опоре 13 вдоль пути 4 процесс передачи тягового усилия на нить 6 одного кольцевого несуще-тягового каната повторяется, но с другой нитью 6. Один из отцепляемых зажимов 9, на которых висит пассажирский вагон 7, в шахматном порядке устраняет жесткую связь с одной из нитей 6 одного кольцевого несуще-тягового каната на дискретном приводе 10 (на незначительный промежуток времени), установленном на промежуточной опоре 13, в момент отклонения его на приводном шкиве трения 17. Отцепляемые зажимы 9 пассажирских вагонов 7 в пролетах между промежуточными опорами 13 постоянно связаны с параллельными нитями 6 одного кольцевого несуще-тягового каната. На самих же промежуточных опорах 13 один из отцепляемых зажимов 9 устраняет жесткую связь с одной из нитей 6 одного кольцевого несуще-тягового каната на дискретном приводе 10 на незначительный промежуток времени.
Третий этап. При подходе пассажирского вагона 7, где установлен источник питания 26 (не показан), к станциям подается автоматический сигнал на управление частотного преобразователя, который приводит в движение мехатронный модуль движения привода колес 23 каретки 8. Колеса (не обозначены) приводятся в движение в холостом режиме до скорости, равной линейной скорости движения пассажирского вагона 7. В момент захода на станцию колеса соприкасаются с жесткими путями 27 и питание преобразователя, а также подзарядка источника питания 26 начинает подаваться через троллеи 28. В этот момент происходит открытие всех отцепляемых зажимов 9, движение пассажирского вагона 7 продолжается по жестким путям 27, а управление и питание мехатронным модулем движения привода колес 23 каретки 8 на станциях 1, 2, 3 осуществляется через троллеи 28. Дальнейшее движение вагонов 7 до места посадки высадки пассажиров на станциях 1, 2, 3 происходит за счет мехатронного модуля движения привода колес 23 каретки 8.
Четвертый этап. Движение вагонов 7 до платформ к местам посадки высадки пассажиров на станциях 1, 2, 3 происходит по жестким путям 27 через автоматические стрелки 29 за счет мехатронного модуля движения привода колес 23 каретки 8 под управлением частотного преобразователя, получающего питание по троллеи 28. Частотный преобразователь функционально встроен в иерархическую систему управления 15 канатной дороги, но позицией на фигурах не обозначен.
Для подтверждения работы городской канатной дороги построена мультимедийная модель, подтвердившая работоспособность на всех этапах функционирования канатной дороги и наглядно демонстрирующая ее работу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2012 |
|
RU2506182C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2008 |
|
RU2381931C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2011 |
|
RU2471662C1 |
| ГРУЗОПАССАЖИРСКИЙ КАНАТНО-ПЕРЕПРАВОЧНЫЙ КОМПЛЕКС | 2011 |
|
RU2478503C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА С МЕХАТРОННЫМИ ДВИЖИТЕЛЯМИ | 2012 |
|
RU2507095C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ВЫСОТНЫХ ЗДАНИЙ | 2012 |
|
RU2503561C2 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2287444C1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2269443C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2003 |
|
RU2247671C1 |


Городская канатная дорога относится к транспорту для перевозки пассажиров в городской местности на электрической канатной тяге. Городская канатная дорога содержит концевые, промежуточные, пересадочные станции, соединенные между собой путями. Пути выполнены в виде двух и более нитей одного кольцевого несуще-тягового каната. Дискретный привод содержит один или более мехатронных движителей в виде модуля движения с иерархической системой управления. Кинематическая цепь каждого модуля движения содержит один или более электрических двигателей, каждый из которых соединен с приводным шкивом трения рабочего и аварийного тормоза. Каждая каретка пассажирского вагона оснащена мехатронным модулем движения привода колес и отцепляемыми зажимами по количеству, не менее чем число нитей несуще-тягового каната. Отцепляемые зажимы выполнены в виде шарнирно сочлененных звеньев, подвижное звено каждого из которых взаимодействует на промежуточных опорах с направляющими, задающими траекторию и время срабатывания зажима. Источники питания расположены в пассажирских вагонах. Система переадресации пассажирских вагонов содержит один и более жестких путей с троллеями и автоматическими стрелками, взаимодействующими на станциях с мехатронными модулями движения привода колес каретки. В результате повышается производительность канатной дороги, расширяются ее функциональные возможности. 5 ил.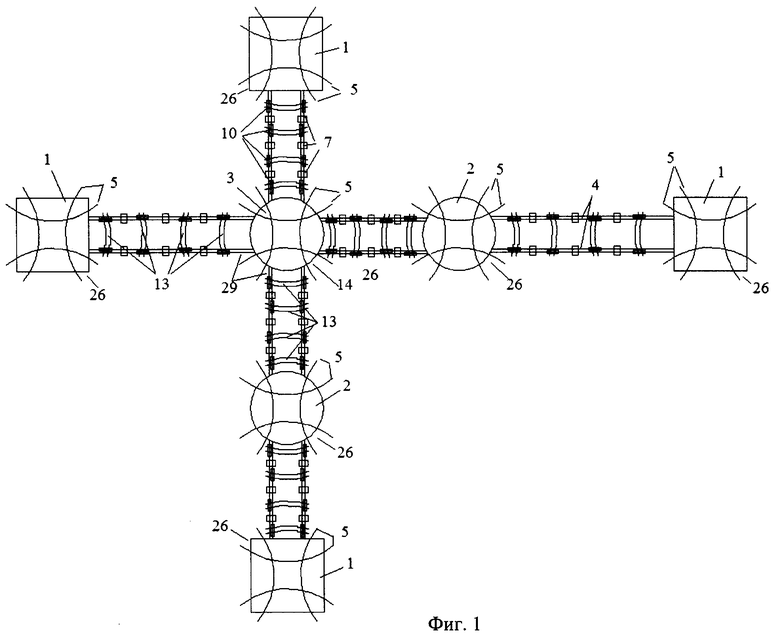
Городская канатная дорога, содержащая концевые, промежуточные, пересадочные станции, соединенные между собой путями, установленными на опорах над проезжими частями улиц с сохранением под ними габаритов для движения городского автотранспорта и проходящими над городской застройкой, каждый путь состоит из канатов, пассажирские вагоны подвешены к канатам через каретки посредством отцепляемых зажимов, приводимых в движением канатом от дискретного привода, содержащего мехатронные движители, входящие в кинематическую цепь демпферной шарнирно сочлененной системы роликовых балансиров, установленных на промежуточных опорах, систему переадресации пассажирских вагонов, установленную на промежуточных и пересадочных станциях, отличающаяся тем, что каждый путь выполнен в виде двух и более нитей одного кольцевого несуще-тягового каната; дискретный привод содержит один или более мехатронных движителей в виде мехатронного модуля движения с иерархической системой управления, при этом кинематическая цепь каждого модуля движения содержит один или более электрических двигателей, каждый из которых соединен с приводным шкивом трения рабочего и аварийного тормозов; две и более последовательно установленные через пружины и демпферы разной жесткости демпферные шарнирно сочлененные системы роликовых балансиров, расположенные в одной плоскости вдоль нитей несуще-тягового каната; одна из нитей поочередно в шахматном порядке огибает приводные шкивы трения каждого модуля движения, расположенные вне зоны движения каретки пассажирского вагона; при этом каждая каретка дополнительно оснащена мехатронным модулем движения привода колес и отцепляемыми зажимами по количеству не менее чем число нитей несуще-тягового каната; отцепляемые зажимы выполнены в виде шарнирно сочлененных звеньев, подвижное звено которого взаимодействует на промежуточных опорах с направляющими, задающими траекторию и время срабатывания отцепляемого зажима; источники питания расположены в пассажирских вагонах; система переадресации пассажирских вагонов содержит один и более жестких путей с троллеями и автоматическими стрелками, взаимодействующими на станциях с мехатронными модулями движения привода колес каретки.
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2008 |
|
RU2381931C1 |
| US 7624684 В2, 01.12.2009 | |||
| DE 4334589 А1, 09.06.1994. | |||

