Изобретение относится к транспортным системам для урбанизированной среды на электрической канатной тяге.
Транспортная система («канатное метро») может использоваться в качестве городского транспорта для перевозки пассажиров в вагонах по кратчайшему пути в пространстве и времени, опираясь на промежуточные опоры в надземном ярусе, в том числе проходя над существующими трассами, транспортными и водными путями, электрическими проводами, нефте-, газо-, водопроводами, естественными и инженерными зданиями или сооружениями в урбанизированной среде с учетом габаритов приближения, в том числе и опираясь на них.
Транспортная система («канатное метро») представляет собой мехатронную систему, все механизмы которой являются мехатронными модулями движения, увязанными между собой механической связью в виде кольцевого тягового каната из двух и более нитей, а система управления представляет собой иерархическую децентрализованную сеть с единым протоколом обмена информацией между мехатронными модулями движения.
Известна транспортная система в г. Медельин (Колумбия), состоящая из подземного метро, соединенного с транспортной системой метроканат, схема и описание которой представлены на сайте (http://planetolog.ru/map-metro-big.php?country=CO&city=EOH&scheme=1).
Транспортная система метроканат недостаточно комфортабельная. На станциях пассажирские вагоны полностью не останавливаются, что ограничивает ее применение для пассажиров преклонного возраста, с детьми и инвалидов. Ограничена длина пути между станциями за счет применения одного несуще-тягового каната для движения пассажирских вагонов. На конкурсе BritInsurance Design, Великобритания, 2009, конструкция транспортной системы метроканат признана «замечательным ресурсом высокого практического и социального значения», поскольку в ее концепции было переосмыслено традиционное предназначение канатных дорог.
Известна городская канатная дорога в городе Гренобль, пущенная в эксплуатацию в 1934 г. Первые пассажирские кабинки были вполне традиционными: большие «вагоны», вмещавшие до 21 пассажира. В 1976 году на смену им пришли созданные инженером Денни Кресселем маленькие шестиместные шарообразные кабинки из плексигласа (http://www.bastille-grenoble.fr/english/tele_uk.htm).
Известна канатная дорога в городах как доступный общественный транспорт, например дорога в Рио-де-Жанейро Complex odo Alemao считается самой длинной городской канатной дороге в мире. Подвесные канатные дороги существенно облегчают доступ к спортивным объектам городов: Олимпийские игры 2012 года (Лондон); Чемпионат мира по футболу 2014 года; Олимпийские игры 2016 года (Рио-де-Жанейро).
Известна транспортная система (RU №2297934 С1 от 27.10.2007), включающая ходовой путь и транспортное средство с колесами. Система относится к транспортным системам с фиксированной траекторией движения. Техническим результатом является сочетание одновременного преимущества как рельсового, так и безрельсового транспорта в городском транспорте.
К недостаткам транспортной системы, содержащей ходовой путь и подвеску транспортного средства на колесах, относится отсутствие стрелочных переходов и как следствие невозможность изменения маршрута движения, в том числе на станциях. Большие массы подвески и самого транспортного средства затрудняют процесс разгона и торможения на станциях, что в значительной степени снижает производительность. Эти недостатки ограничивают возможность применять систему в качестве разветвленного городского транспорта на незначительные расстояния. Ходовой путь, представляющий собой в профиле полутрапецию наклонной частью наружу из бетонных элементов, массивен, трудоемок в изготовлении, монтаже, при строительстве требует большого количества опор, установленных на небольшом расстоянии (max. 12 м) друг относительно друга. Конструкция очень плохо интегрируется в архитектурный облик сложившейся урбанистической среды. Система представляет собой сложно выстроенный централизованный технический механизм, что осложняет проектирование, строительство и последующее наращивание мощностей транспортной системы при подключении дополнительных устройств.
Задачей изобретения является создание универсальной пассажирской транспортной системы для урбанизированной среды на основе мехатронного модульного принципа проектирования и строительства без ограничения формы профиля в плане и длины пути в пространстве.
Поставленная задача решена тем, что транспортная система, включающая путь, опирающийся на промежуточные опоры, и транспортное средство, является мехатронной, содержащей мехатронные модули, увязанные между собой механической связью в виде пути, состоящего из одной и более нитей кольцевого тягового каната, и систему управления на базе иерархической децентрализованной сети с единым протоколом обмена информацией между мехатронными модулями, при этом мехатронными модулями являются: мехатронный модуль кольцевого тягового каната, расположенный между балансирами и содержащий два и более двигателя, оснащенных рабочими и аварийными тормозами и расположенных на промежуточных опорах, создающих тяговое усилие или торможение на одной из нитей кольцевого тягового каната посредством шкива трения с натяжным устройством, а балансиры, на которые опираются нити кольцевого тягового каната, представляют собой демпферную шарнирно-сочлененную систему поддерживающих роликов; мехатронный модуль транспортного средства с двигателем разгона-торможения и автоматические захваты, установленные на каретке, по их количеству и размеру соответствующие нитям кольцевого тягового каната с подвешенными к ним транспортными средствами в виде пассажирских вагонов и взаимодействующие с устройством срабатывания захватов, установленным на промежуточных опорах; мехатронный модуль станции, содержащий последовательно установленные на въезде-выезде устройства срабатывания захватов, конвейеры контроля скорости каретки при разгоне-торможении, автоматические «стрелки», сопряженные с одним из жестких путей соответствующего маршрута, и посадочные площадки для загрузки-выгрузки пассажиров из пассажирских вагонов, при этом путь проходит над трассами, транспортными и водными путями, электрическими проводами, нефте-, газо-, водопроводами, естественными препятствиями и инженерными сооружениями по территории урбанизированной среды с учетом габаритов приближения, в том числе и опираются на них.
Путь транспортной системы дополнительно содержит один и более несущих канатов, соединенных подвесными опорами в пролетах с нитями кольцевого тягового каната, имеющими поддерживающие блоки, по их количеству и размеру соответствующие нитям кольцевого тягового каната, и жесткие зажимы, по их количеству и размеру соответствующие несущим канатам, а каретка дополнительно оснащена колесами, опирающимися на несущие канаты, при этом количество колес и их размер соответствуют количеству и размеру несущих канатов.
Технический результат заключается в том, что предложена новая конструкция транспортной системы в виде мехатронной системы, состоящей из мехатронных модулей. В такой постановке проектирование и строительство любой канатной системы («канатного метро») состоит из механической компоновки определенных модулей в определенной последовательности. Количество модулей, увязанных между собой общими параметрами, может варьироваться в зависимости от заданной цели или наращиваться в случае необходимости. Модули кольцевого тягового каната, расположенные на промежуточных опорах, позволяют увеличить эффективность тягового усилия за счет распределения его на каждой промежуточной опоре. Движение транспортных средств по путям между модулями станций происходит путем создания тягового усилия или торможения на одной нити кольцевого тягового каната посредством шкива трения с натяжным устройством, при этом за счет многократного дублирования модулей кольцевого тягового каната транспортное средство сможет достичь модуля станции даже при выходе из строя одного или нескольких модулей кольцевого тягового каната, тем самым повышается безопасность и комфорт пассажиров транспортной системы. При установке двух и более модулей кольцевого тягового каната вдоль пути транспортирования (например, на промежуточных опорах) получается многоприводный механизм, обладающий рядом преимуществ, основным из которых является уменьшение тягового усилия в нитях кольцевого тягового каната и как следствие - уменьшение его диаметра (для динамической задачи - подвижной массы).
С точки зрения механики связующим звеном между модулями кольцевого тягового каната является гибкий тяговый орган (стальной канат), характеризующийся в предложенной конструкции количеством нитей кольцевого тягового каната и его диаметром. При использовании многоканатной системы повышается безопасность транспортной системы.
С точки зрения системы управления используется децентрализованная сеть с единым протоколом обмена информацией (например, PROFIBUS), обладающая экономическим преимуществом в части снижения цены за счет сокращения кабельного соединения и уменьшения занимаемой площади, технологическим - по уменьшению времени отладки и ввода в эксплуатацию, гибкостью к подключению дополнительных устройств к системе управления, возможностью развития интеллектуальности системы при реализации задач автоматики вне блока центрального процессора с помощью многофункциональных контроллеров.
Наличие мехатронного модуля станции позволяет изменять маршрут движения пассажирских вагонов на другие пути движения за счет автоматических «стрелок» въезда-выезда, сопряженных с одним из жестких путей соответствующего маршрута. Данная функция позволяет пассажирам минимизировать время нахождения в пути между точками начала и конца маршрута.
Пассажирские вагоны разгоняются и тормозятся мехатронными модулями станции, включающими конвейеры контроля скорости каретки при разгоне-торможении, позволяющими варьировать ускорением в широких пределах, и посадочными площадками для загрузки-выгрузки пассажиров из вагонов, и, следовательно, с их помощью можно регулировать производительность в зависимости от пассажирских потоков, с одной стороны, а с другой стороны, повысить комфорт пассажиров за счет наличия возможности пассажирского вагона полностью остановиться на посадочной площадкой и плавно набрать скорость для перехода в движение между станциями.
Каждый мехатронный модуль движения транспортного средства с функцией разгона-торможения содержит каретку, опирающуюся на путь посредством колес, по их количеству и размеру соответствующих количеству несущих канатов, автоматические захваты, установленные на каретке, взаимодействуют с профилем и по их количеству и размеру соответствуют нитям кольцевого тягового каната с подвешенными к ним транспортными средствами в виде пассажирских вагонов. Такая конструкция мехатронного модуля позволяет изменять количество пассажирских вагон в зависимости от пассажиропотока и резервировать пассажирские вагоны на станциях для пассажиров, что минимизирует время ожидания свободного посадочного места.
Длина пути между станциями практически неограниченна за счет применения одного и более несущих канатов, жестко соединенных между собой подвесными опорами. Многоканатная тяга, приводящая в движение пассажирские вагоны, через автоматические захваты, установленные на каретке, по их количеству и размеру соответствующие нитям тягового каната с подвешенными к ним транспортными средствами в виде пассажирских вагонов, создает практически неограниченное тяговое усилие и снимает ограничения по количеству вагонов в пролете и пассажиров в вагоне.
Сущность предлагаемого изобретения поясняется чертежами.
На фиг.1 изображена транспортная система («канатное метро»).
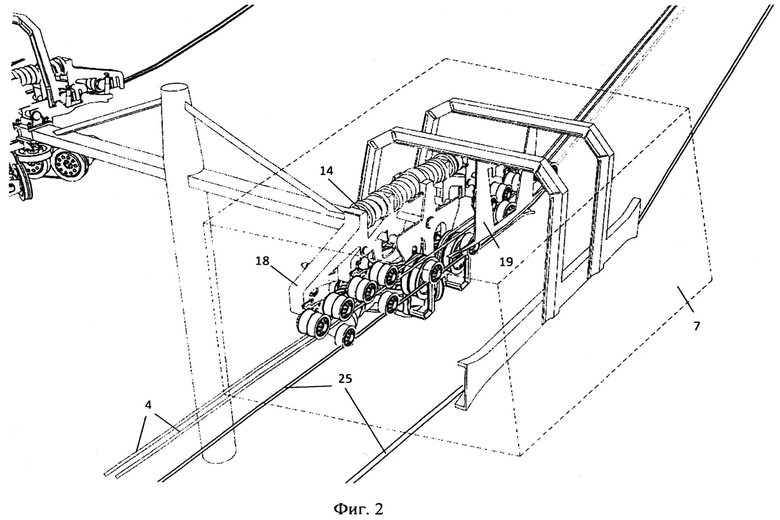
На фиг.2 - модуль кольцевого тягового каната (пример: путь из двух несущих канатов и двух нитей тягового каната).
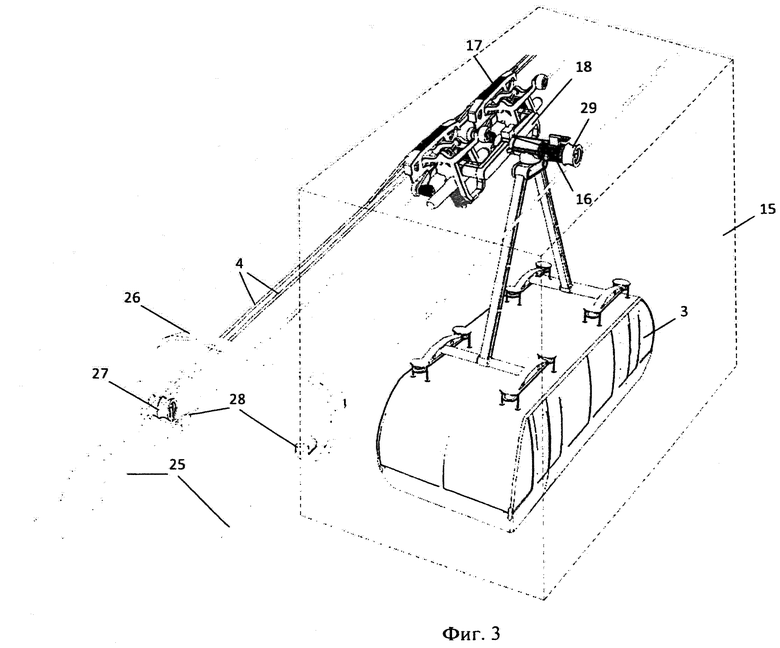
На фиг.3 - модуль подвижного состава (пример: путь из двух несущих канатов и двух нитей тягового каната).
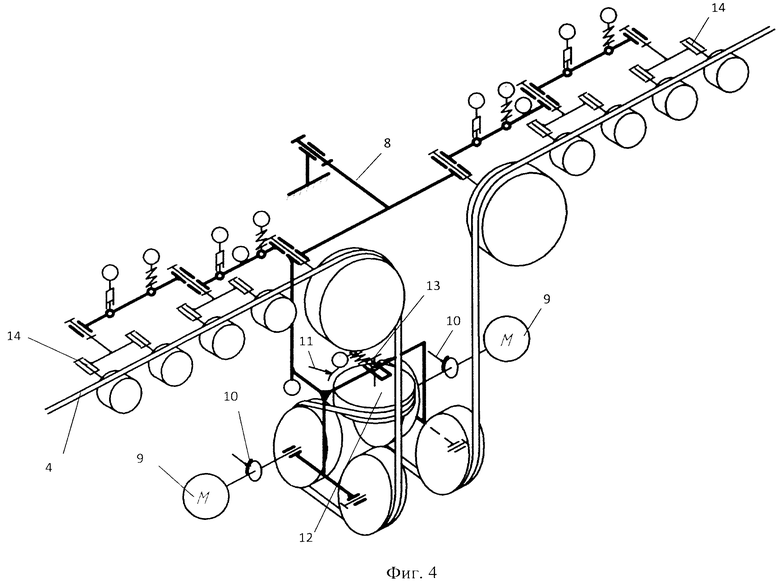
На фиг.4 - кинематическая схема модуля кольцевого тягового каната (пример: путь из одной нити тягового каната).
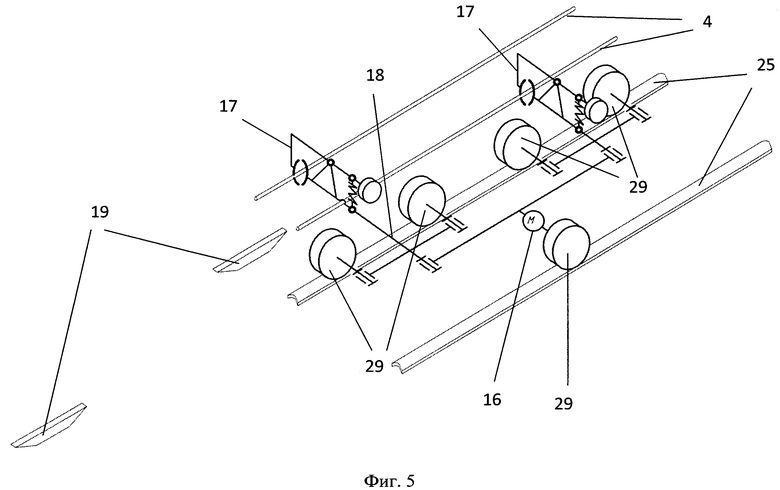
На фиг.5 - кинематическая схема модуля подвижного состава (пример: путь из двух несущих канатов и двух нитей тягового каната).
Транспортная система, включающая путь 1, опирающийся на промежуточные опоры 2, и транспортное средство в виде пассажирских вагонов 3, является мехатронной, содержащей мехатронные модули, увязанные между собой механической связью в виде пути 1, состоящего из одной и более нитей кольцевого тягового каната 4, и систему управления 5 на базе иерархической децентрализованной сети 6 с единым протоколом обмена информацией между мехатронными модулями, при этом мехатронными модулями являются: мехатронный модуль кольцевого тягового каната 7, расположенный на промежуточных опорах 2 в конструкции балансиров 8 и содержащий два и более двигателя 9, оснащенных рабочим 10 и аварийным 11 тормозами, создающих тяговое усилие или торможение на одной из нитей кольцевого тягового каната 4 посредством шкива трения 12 с натяжным устройством 13, а балансиры 8, на которые опираются нити кольцевого тягового каната 4, представляют собой демпферную шарнирно-сочлененную систему поддерживающих роликов 14; мехатронный модуль транспортного средства 15 с двигателем разгона-торможения 16 и автоматические захваты 17, установленные на каретке 18, по их количеству и размеру соответствующие нитям кольцевого тягового каната 4 с подвешенными к ним транспортными средствами в виде пассажирских вагонов 3 и взаимодействующие с устройством срабатывания захватов 19, установленным на промежуточных опорах 2; мехатронный модуль станции 20, содержащий последовательно установленные на въезде-выезде устройства срабатывания захватов 19, конвейеры 21 контроля скорости каретки 18 при разгоне-торможении, автоматические «стрелки» 22, сопряженные с одним из жестких путей 23 соответствующего маршрута, и посадочные площадки 24 для загрузки-выгрузки пассажиров из пассажирских вагонов, при этом путь 1 проходит над трассами, транспортными и водными путями, электрическими проводами, нефте-, газо-, водопроводами, естественными препятствиями и инженерными сооружениями по территории урбанизированной среды с учетом габаритов приближения, в том числе и опираются на них.
Путь 1 дополнительно содержит один и более несущих канатов 25, соединенных подвесными опорами 26 в пролетах, имеющими поддерживающие блоки 27, по их количеству и размеру соответствующие нитям кольцевого тягового каната 4, на которые нити кольцевого тягового каната 4 опираются, и жесткие зажимы 28, по их количеству и размеру соответствующие несущим канатам 25, а каретка 18 дополнительно оснащена колесами 29, опирающимися на несущие канаты 25, при этом количество колес 29 и их размер соответствуют количеству и размеру несущих канатов 25.
Транспортная система работает следующим образом. Путь 1, по которому движется транспортное средство в виде пассажирского вагона 3, выполнен из нитей кольцевого тягового каната 4, проходящих над трассами, транспортными и водными путями, электрическими проводами, нефте-, газо-, водопроводами, естественными препятствиями и инженерными сооружениями по территории урбанизированной среды с учетом габаритов приближения, в том числе и опираются на них. Нити кольцевого тягового каната 4 соединены с транспортным средством в виде пассажирского вагона 3 посредством каретки 18 и установленных на ней автоматических захватов 17. Тяговое усилие (торможение) на нитях кольцевого тягового каната 4 создается мехатронными модулями кольцевого тягового каната 7, расположенными на промежуточных опорах 2. Каждый мехатронный модуль кольцевого тягового каната 7 интегрирован в конструкцию балансиров 8 и содержит два и более двигателя 9, оснащенных рабочим 10 и аварийным 11 тормозами. В момент, когда мехатронный модуль транспортного средства 15 приближается к промежуточной опоре 2, один из автоматических захватов 17, установленный на каретке 18, взаимодействует с устройством срабатывания захватов 19 и отцепляется от одной из нитей кольцевого тягового каната 4. Транспортное средство в виде пассажирского вагона 3 в это время остается подвешенным к другой из нитей кольцевого тягового каната 4 другим захватом 19. Свободная от захвата 19 нить кольцевого тягового каната 4 отклоняется на демпферной шарнирно-сочлененной системе поддерживающих роликов 14 и огибает шкив трения 12. Натяжение нити кольцевого тягового каната 4 на шкиве трения 12 осуществляется натяжным устройством 13. Шкив трения 12 приводится в движение двумя и более двигателями 9, оснащенными рабочим 10 и аварийным 11 тормозами. Наличие двух и более двигателей 9, оснащенных рабочим 10 и аварийным 11 тормозами, является необходимым условием резервирования при обеспечении безопасности по транспортировке пассажиров, в том числе при проведении спасательной операции. Таким образом, каждым мехатронным модулем кольцевого тягового каната 7 создается тяговое усилие на нитях кольцевого тягового каната 4 и перемещаются по пути 1 транспортные средства в виде пассажирских вагонов 3.
Расположение мехатронных модулей кольцевого тягового каната 7 на промежуточных опорах 2 позволяет создать транспортную систему с канатной тягой без ограничения длины пути 1, по которому перемещаются транспортные средства в виде пассажирских вагонов 3, при этом диаметр нитей кольцевого тягового каната 4 зависит от их количества, длины пролета между промежуточными опорами 2 и максимальным количеством транспортных средств в виде пассажирских вагонов 3 в пролете. Количество транспортных средств в виде пассажирских вагонов 3 на трассе 1 варьируется в зависимости от пассажиропотока.
Транспортное средство в виде пассажирских вагонов 3, в котором перемещаются пассажиры, оборудовано мехатронным модулем транспортного средства 15, содержащим двигатель разгона-торможения 16 и автоматические захваты 17, установленные на каретке 18, по их количеству и размеру соответствующие нитям кольцевого тягового каната 4. При подходе транспортного средства в виде пассажирского вагона 3 к модулю станции 20 автоматические захваты 17 взаимодействуют с устройством срабатывания захватов 19 и отсоединяют модуль транспортного средства 15 от нитей кольцевого тягового каната 4. В этот момент каретка 18 попадает на конвейер 21 контроля ее скорости, включается двигатель разгона-торможения 16, приводящий в движение колеса 29, которые в свою очередь соприкасаются с жесткими путями 23. Пройдя конвейер 21, транспортное средство в виде пассажирского вагона 3 с помощью модуля транспортного средства 15 продолжает двигаться по жестким путям 23 и менять маршрут движения с помощью автоматической стрелки 22 по программе системы управления 5, передаваемой по сети 6. Далее, двигаясь по заданному программой маршруту с заданной скоростью в модуле станции 20, транспортное средство в виде пассажирского вагона 3 подходит к посадочной площадке, останавливается, где происходит посадка-высадка пассажиров. После посадки-высадки пассажиров по программе системы управления 5, передаваемой по сети 6, транспортное средство в виде пассажирского вагона 3 начинает движение, переходит с помощью автоматической стрелки 22 на необходимый маршрут. Каретка 18 попадает на конвейер 21 контроля ее скорости, где достигается равенство скорости модуля транспортного средства 15 и нитей кольцевого тягового каната 4. В этот момент происходит взаимодействие автоматических захватов 17 с устройством срабатывания захватов 19 и модуль транспортного средства 15 соединяется с нитями кольцевого тягового каната 4. Транспортное средство в виде пассажирского вагона 3 попадает на путь 1 и продолжает двигаться до следующего модуля станции 20.
Путь 1 может быть выполнен из нитей кольцевого тягового каната 4 и одного и более несущих канатов 25. Для устранения перехлестывания нитей кольцевого тягового каната 4 и несущих канатов 25 в пролете путь 1 оснащен подвесными опорами 26. Подвесные опоры 26 имеют поддерживающие блоки 27, по их количеству и размеру соответствующие нитям кольцевого тягового каната 4, на которые нити кольцевого тягового каната 4 опираются, и жесткие зажимы 28, по их количеству и размеру соответствующие несущим канатам 25, при этом каретка 18, дополнительно оснащенная колесами 29, опирается на несущие канаты 25, при этом количество колес 29 и их размер соответствуют количеству и размеру несущих канатов 25.
Конструкция такого пути 1 позволяет распределить нагрузку от транспортного средства в виде пассажирского вагона 3 между канатами и как следствие увеличить расстояние между промежуточными опорами 2, уменьшить диаметр нитей кольцевого тягового каната 4, что в конечном итоге приводит к улучшению динамических нагрузок за счет уменьшения подвижной массы, уменьшению габаритов вращающихся частей, на которых происходит опирание или изгиб нитей кольцевого тягового каната 4, а также улучшает условия перевозки, монтажа и пусконаладки за счет уменьшения габаритов и массы комплектующих.
Учитывая то обстоятельство, что предложенная транспортная система отвечает всем определяющим признакам метрополитена по квалификации Роберта Швандль, а именно:
- используется в урбанизированной местности (в городах, агломерациях, конурбациях);
- работает на электрической тяге;
- полностью отделена от любого другого движения, будь то железнодорожное, улично-дорожное или пешее;
- работает часто (с рабочим интервалом в дневное время не более 10 минут);
- уровни пола вагона и перрона совпадают (этот признак не обязателен),
авторами предлагается для транспортной системы, пути которой выполнены из одного и более несущих канатов с многоканатной тягой пассажирских вагонов, название «канатное метро».
Для подтверждения работоспособности и проверки эффективности транспортной системы авторами разработаны схемы развития транспортной системы «канатное метро» в городах России и Украины: Брянск, Одесса, Ростов-на-Дону, Санкт-Петербург, Ставрополь, Москва, Севастополь, Киев, Сочи, Екатеринбург, Красноярск, Новочеркасск, Сколково.
На основании вышеизложенного и с учетом проведенного патентно-информационного поиска можно считать, что предлагаемое устройство «Транспортная система («канатное метро»)» может быть признано изобретением и защищено патентом Российской Федерации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2466889C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2011 |
|
RU2471662C1 |
| ГРУЗОПАССАЖИРСКИЙ КАНАТНО-ПЕРЕПРАВОЧНЫЙ КОМПЛЕКС | 2011 |
|
RU2478503C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2008 |
|
RU2381931C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА С МЕХАТРОННЫМИ ДВИЖИТЕЛЯМИ | 2012 |
|
RU2507095C1 |
| ТРАНСПОРТНЫЙ МУЛЬТИМОДАЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2471661C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ВЫСОТНЫХ ЗДАНИЙ | 2012 |
|
RU2503561C2 |
| БЫСТРОМОНТИРУЕМАЯ МОБИЛЬНАЯ КАНАТНАЯ ДОРОГА | 2022 |
|
RU2780877C1 |
| МОДУЛЬНАЯ МОБИЛЬНАЯ КАНАТНАЯ ДОРОГА | 2023 |
|
RU2818434C1 |
Изобретение относится к транспортным системам для урбанизированной среды на электрической канатной тяге. Транспортная система («канатное метро») может использоваться в качестве городского транспорта для перевозки пассажиров в вагонах по кратчайшему пути в пространстве и времени, опираясь на промежуточные опоры в надземном ярусе, в том числе проходя над существующими трассами, транспортными и водными путями, электрическими проводами, нефте-, газо-, водопроводами, естественными и инженерными зданиями или сооружениями в урбанизированной среде с учетом габаритов приближения, в том числе и опираясь на них. Конструкция транспортной системы выполнена в виде мехатронной системы, состоящей из мехатронных модулей. В такой постановке проектирование и строительство любой канатной системы («канатного метро») состоит из механической компоновки определенных модулей в определенной последовательности. Количество модулей, увязанных между собой общими параметрами, может варьироваться в зависимости от заданной цели или наращиваться в случае необходимости. В результате создана универсальная пассажирская транспортная система для урбанизированной среды, хорошо интегрирующая с урбанизированной средой, что упрощает ее проектирование, строительство и последующее наращивание мощности. 1 з.п. ф-лы, 5 ил.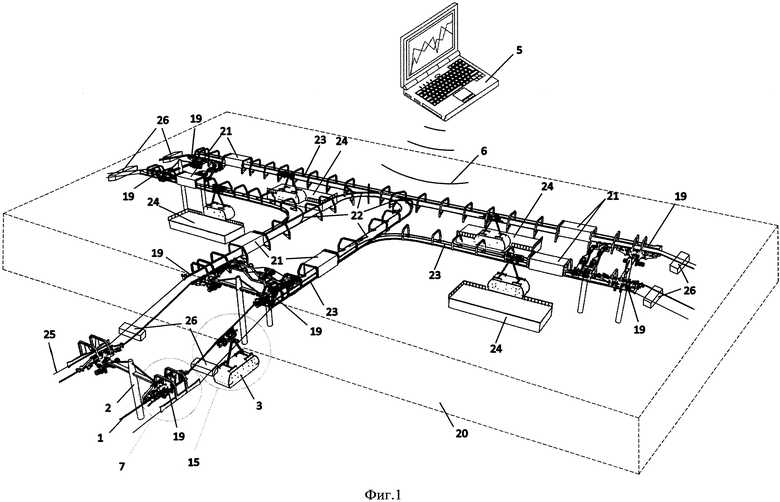
1. Транспортная система, включающая путь, опирающийся на промежуточные опоры, и транспортные средства в виде пассажирских вагонов, отличающаяся тем, что транспортная система является мехатронной, содержащей мехатронные модули, увязанные между собой механической связью в виде пути, состоящего из одной и более нитей кольцевого тягового каната, и систему управления на базе иерархической децентрализованной сети с единым протоколом обмена информацией между мехатронными модулями, при этом мехатронными модулями являются: мехатронный модуль кольцевого тягового каната, расположенный на промежуточных опорах в конструкции балансиров и содержащий два и более двигателя, оснащенных рабочим и аварийным тормозами, создающих тяговое усилие или торможение на одной из нитей кольцевого тягового каната посредством шкива трения с натяжным устройством, а балансиры, на которые опираются нити кольцевого тягового каната, представляют собой демпферную шарнирно-сочлененную систему поддерживающих роликов; мехатронный модуль транспортного средства с двигателем разгона-торможения и автоматические захваты, установленные на каретке, по их количеству и размеру соответствующие нитям кольцевого тягового каната с подвешенными к ним транспортными средствами в виде пассажирских вагонов и взаимодействующие с устройством срабатывания захватов, установленным на промежуточных опорах; мехатронный модуль станции, содержащий последовательно установленные на въезде-выезде устройства срабатывания захватов, конвейеры контроля скорости каретки при разгоне-торможении, автоматические «стрелки», сопряженные с одним из жестких путей соответствующего маршрута, и посадочные площадки для загрузки-выгрузки пассажиров из пассажирских вагонов, при этом путь проходит над трассами, транспортными и водными путями, электрическими проводами, нефте-, газо-, водопроводами, естественными препятствиями и инженерными сооружениями по территории урбанизированной среды с учетом габаритов приближения, в том числе и опираются на них.
2. Транспортная система по п.1, отличающаяся тем, что путь дополнительно содержит один и более несущих канатов, соединенных подвесными опорами в пролетах, имеющими поддерживающие блоки, по их количеству и размеру соответствующие нитям кольцевого тягового каната, на которые нити кольцевого тягового каната опираются, и жесткие зажимы, по их количеству и размеру соответствующие несущим канатам, а каретка дополнительно оснащена колесами, опирающимися на несущие канаты, при этом количество колес и их размер соответствуют количеству и размеру несущих канатов.
| Способ определения характеристик и оптимального режима фотоумножителей | 1957 |
|
SU120617A1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2008 |
|
RU2381931C1 |
| Импульсный конденсаторный частотомер | 1956 |
|
SU113220A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| JP 5345563 A, 27.12.1993. | |||

