Изобретение относится к транспортным средствам, в частности к мобильным канатным дорогам для перемещения грузов и пассажиров.
Известна конструкция ленточного конвейера большой производительности с линейными двигателями. Металлическая или резинотканевая, армированная продольными тросами и поперечными перемычками лента, может быть использована как вторичный элемент линейного двигателя, индукторы которого расположены неподвижно, с интервалами по всей длине конвейера. Такая схема расположения двигателей дает возможность распределить места приложения силы по всей длине конвейера и таким образом значительно уменьшить требуемую прочность, а значит, сечение и стоимость ленты, а также теоретически создать конвейер бесконечной длины. (Линейные асинхронные двигатели. Ижел Г.И., Ребров С.А., Шаповаленко А.Г., "Техника", 1975, с.98-100).
Однако имеется ряд препятствий к быстрому и успешному внедрению этих работ в практику. Так, например, для быстроходного конвейера наиболее подходящей являлась бы тонкая стальная лента. Однако использовать ее как вторичную часть линейного двигателя затруднительно из-за малой толщины: такая ферромагнитная лента легко притягивалась бы к индукторам линейных двигателей и вместо тягового создавала бы тормозное усилие из-за силы трения, возникающей между притянутой лентой и индуктором.
Использование ленты из немагнитной стали значительно снизило бы кпд линейного двигателя вследствие большого ее удельного сопротивления. Хорошим материалом для вторичной части линейного двигателя является алюминий, однако лента из него работала бы ненадежно вследствие частых обрывов, обусловленных малой механической прочностью алюминия.
Наиболее близким по конструктивным особенностям, технической сущности и достигаемому результату к данному изобретению является подвесная канатная дорога (Патент на изобретение Российской Федерации № 2247671 БИ № 7 от 10 марта 2005 г.), содержащая приводной шкив, кинематически соединенный с движителем основной самоходной транспортной установки, натяжной шкив и огибающий их замкнутый натянутый несуще-тяговый канат с прицепными устройствами, дополнительную самоходную транспортную установку, заякоренную натяжным устройством вдоль оси канатной дороги, при этом движитель этой установки кинематически соединен с натяжным шкивом, а основная самоходная транспортная установка расположена горизонтально на вертикально установленных гидравлических аутригерах навстречу дополнительной самоходной транспортной установке, причем натяжной и приводной шкивы выполнены из отдельных сборно-разборных секторов, шарнирно соединенных между собой, а канатная дорога дополнительно оснащена линейными роликовыми балансирами, установленными на телескопических опорах вдоль продольной оси канатной дороги.
Описанная подвесная канатная дорога конструктивно сложна, имеет множество сложных сборно-разборных элементов, из которых изготовлены натяжной и приводной шкивы. Натяжное устройство дороги имеет якорь для создания необходимого тягового усилия, что также усложняет конструкцию. У существующих канатных дорог с приводом, выполненным в виде двигателя вращательного действия и приводным шкивом, сила тяги, необходимая для движения каната с прицепными устройствами, создается силой трения между канатом и приводным шкивом. Эта сила прикладывается к канату в одном месте у приводного шкива и передается по всей длине дороги, поэтому канат должен быть довольно прочным. Однако при значительных длинах (примерно 1000 м и более) масса самого каната становится соизмеримой с массой прицепных устройств и при длинах более 3000 м канатная дорога становится неэффективной, а сам канат может разрушиться, перемещая сам себя.
Эта конструкция имеет ряд недостатков, а именно:
- сложную конструкцию приводного и натяжного шкивов, натяжного устройства и кинематическую связь с движителем;
- ограниченные возможности по длине транспортирования, связанные с ограничениями по прочности и диаметру несуще-тягового каната;
- ограниченные возможности по величине усилия натяжения и как следствие тягового усилия на шкиве;
- увеличение длины транспортирования и производительности ограничивается диаметром каната и возрастанием его жесткости при изгибе на приводном шкиве;
- недостаточная безопасность из-за возможности схода каната при прохождении его через роликовые балансиры (в существующих конструкциях канатных дорог усилие прижатия каната к роликовым балансирам достигается путем профилирования трассы дороги за счет высоты опор);
- ограничения по расстоянию между опорами линейных роликовых балансиров, связанные с предельно допустимой величиной провеса в пролете и повышенной динамикой (раскачивание прицепных устройств) в процессе пуска и торможения;
- увеличенный путь торможения, связанный со значительными движущимися инерционными массами (масса только одного каната при длине дороги 1.5 км, производительностью 500-600 чел./ч составляет более 20 т).
Изобретение направлено на повышение эффективности канатной дороги, а именно упрощение конструкции привода с одновременным практически неограниченным увеличением длины транспортирования и производительности, повышением безопасности путем применения привода, выполненного в виде многоиндукторного линейного асинхронного двигателя.
Это достигается тем, что мобильная подвесная канатная дорога содержит два шкива, расположенные на самоходных установках, оборудованных гидравлическими аутригерами, замкнутый натянутый несуще-тяговый канат с прицепными устройствами, огибающий шкивы, линейные роликовые балансиры, установленные на телескопических опорах, и привод, который выполнен в виде многоиндукторного линейного асинхронного двигателя, каждый индуктор, являющийся первичной частью асинхронного двигателя, закреплен последовательно, вдоль оси канатной дороги на конструкции линейного балансира между роликами, на которые опирается несуще-тяговый канат, являющийся одновременно вторичной частью (реактивной полосой) линейного асинхронного двигателя, при этом автономные энергетические агрегаты для электропитания всей дороги установлены на самоходных установках.
Распределение линейных двигателей по всей длине канатной дороги существенно разгружает канат, вследствие чего появляется возможность применять канат меньшего диаметра.
У линейных электродвигателей поступательная сила тяги создается за счет энергии бегущего магнитного поля и взаимодействия магнитного потока индуктора с током реактивной полосы, в нашем случае канатом. В связи с этим сила тяги и ускорение не ограничиваются силой сцепления приводного шкива с канатом и могут быть весьма большими. Иногда ускорение в несколько раз превышает ускорение силы тяжести.
Все сказанное выше в равной степени относится к условиям торможения канатной дороги. Последнее обстоятельство имеет большое значение с точки зрения повышения безопасности движения, определяемое длиной тормозного пути.
Имеющийся недостаток линейных двигателей, заключающийся в том, что индуктор с большой силой притягивается к канату (реактивной полосе), в нашем случае является достоинством, так как за счет этого явления повышается безопасность в части невозможности схода каната с роликового балансира.
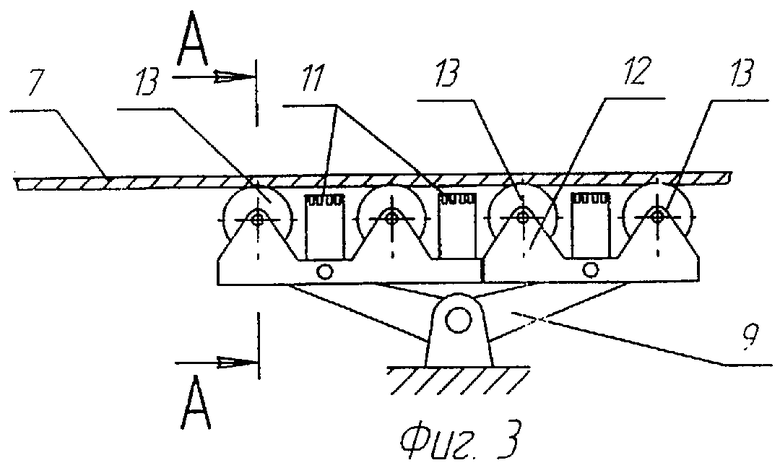
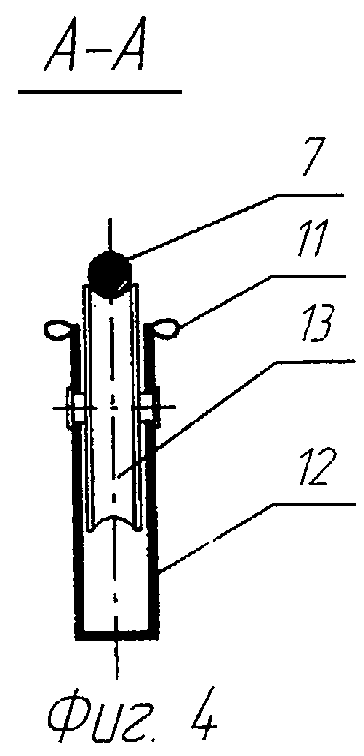
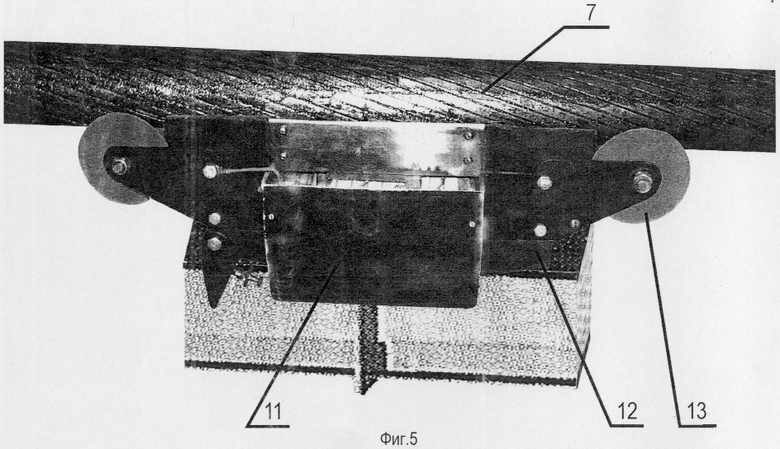
На фиг.1 изображен общий вид канатной дороги; на фиг.2 - общий вид канатной дороги в плане; на фиг.3 - линейный роликовый балансир с индукторами линейного асинхронного двигателя; на фиг.4 - разрез линейного роликового балансира с индукторами линейного асинхронного двигателя по А-А; на фиг.5 представлена фотография испытательной установки с одним индуктором линейного асинхронного двигателя.
Мобильная подвесная канатная дорога содержит два шкива 1, 2, расположенные на самоходных установках 3, 4, оборудованных гидравлическими аутригерами 5, 6, замкнутый натянутый несуще-тяговый канат 7 с прицепными устройствами 8, огибающий шкивы 1 и 2, опирается на линейные роликовые балансиры 9, установленные на телескопических опорах 10, и привод, выполненный в виде многоиндукторного линейного асинхронного двигателя, каждый индуктор 11 которого закреплен последовательно вдоль оси канатной дороги на конструкции 12 линейного балансира 9 между роликами 13, на которые опирается несуще-тяговый канат 7, являющийся одновременно вторичной частью (реактивной полосой) линейного асинхронного двигателя, при этом автономные энергетические агрегаты 14, 15 для электропитания всей дороги установлены на самоходных установках 3, 4.
Канатная дорога работает следующим образом. Сначала выбирается трасса канатной дороги. Определяется на местности расположение самоходных транспортных установок 1 и 2, а также количество и место расположения на трассе канатной дороги телескопических опор 10 с линейными роликовыми балансирами 9.
Затем производят навеску замкнутого несуще-тягового каната 7 через шкивы 1 и 2, опирая его на линейные роликовые балансиры 9, установленные на телескопических опорах 10. К балансирам, где установлен привод, подводят электроэнергию для их питания через регуляторы от автономных энергетических агрегатов 14 и 15, расположенных на самоходных установках 3, 4.
При подаче электроэнергии на индукторы 11 в его обмотках возникает поступательная сила тяги, создаваемая энергией бегущего магнитного поля и взаимодействия магнитного потока индуктора 11с током реактивной полосы (канатом 7). Роликами 13 достигается необходимый зазор между индуктором 11 и канатом 7.
Достоинства предлагаемой мобильной подвесной канатной дороги:
1. Упрощение конструкции привода и натяжного устройства по отношению к прототипу.
2. Неограниченные возможности по длине транспортирования, не зависящие от прочности и диаметра несуще-тягового каната.
3. Неограниченные возможности по величине тягового усилия.
4. Повышенная безопасность из-за невозможности схода каната при прохождении его через роликовые балансиры за счет взаимного притягивания индуктора и каната.
5. Возможность увеличения расстояния между опорами линейных роликовых балансиров, связанного с предельно допустимой величиной провеса в пролете и снижением динамики (уменьшением раскачивания прицепных устройств) в процессе пуска и торможениях;
6. Повышенная безопасность за счет снижения длины тормозного пути.
Для проверки работоспособности предлагаемой канатной дороги с линейным асинхронным двигателем был изготовлен стенд, выполненный в виде одного индуктора линейного асинхронного двигателя (фиг.5), опирающегося через ролики на канат, являющийся одновременно вторичной частью (реактивной полосой) линейного асинхронного двигателя. При подаче электрического питания на индуктор происходило их относительное движение. Испытание модели, изготовленной с учетом основных признаков в предложенном изобретении, показало ее работоспособность.
На основании вышеизложенного, и с учетом проведенного патентно-информационного поиска считаем, что предлагаемое нами устройство "Подвесная канатная дорога" может быть признано изобретением и защищено патентом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2009 |
|
RU2400384C1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2007 |
|
RU2337023C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2003 |
|
RU2247671C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2287444C1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2283787C1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2006 |
|
RU2324613C2 |
| МОДУЛЬНАЯ МОБИЛЬНАЯ КАНАТНАЯ ДОРОГА | 2023 |
|
RU2818434C1 |
| Мобильный буксировочный бугельный подъемник | 2016 |
|
RU2619352C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2466889C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2012 |
|
RU2506182C1 |

Изобретение относится к транспортным средствам, а именно к мобильным канатным дорогам для перемещения грузов и пассажиров. Мобильная подвесная канатная дорога содержит привод, два шкива, каждый из которых расположен на самоходной установке, оборудованной гидравлическими аутригерами, замкнутый натянутый несуще-тяговый канат с прицепными устройствами, огибающий шкивы и опирающийся на ролики линейных балансиров, установленных на телескопических опорах. Привод выполнен в виде многоиндукторного линейного асинхронного двигателя, каждый индуктор которого закреплен последовательно вдоль оси канатной дороги на конструкциях линейных балансиров между роликами, на которые опирается несуще-тяговый канат, являющийся одновременно вторичной частью (реактивной полосой) линейного асинхронного двигателя. Автономные энергетические агрегаты для электропитания всей дороги установлены на самоходных установках. Технический результат - повышение эффективности канатной дороги, упрощение конструкции привода, повышение безопасности. 5 ил.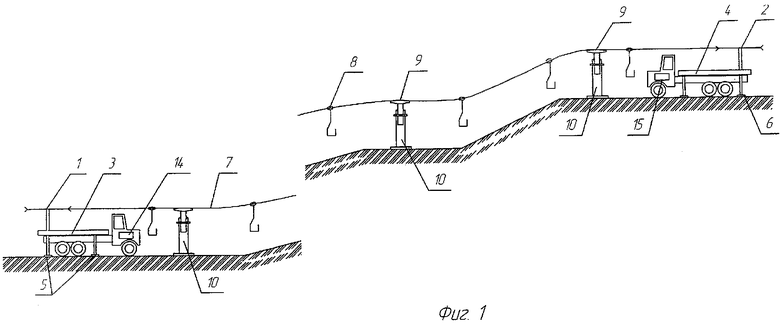
Мобильная подвесная канатная дорога, содержащая привод, два шкива, каждый из которых расположен на самоходной установке, оборудованной гидравлическими аутригерами, замкнутый натянутый несуще-тяговый канат с прицепными устройствами, огибающий шкивы и опирающийся на ролики линейных балансиров, установленных на телескопических опорах, отличающаяся тем, что привод выполнен в виде многоиндукторного линейного асинхронного двигателя, каждый индуктор которого закреплен последовательно вдоль оси канатной дороги на конструкциях линейных балансиров между роликами, на которые опирается несуще-тяговый канат, являющийся одновременно вторичной частью (реактивной полосой) линейного асинхронного двигателя, при этом автономные энергетические агрегаты для электропитания всей дороги установлены на самоходных установках.
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2003 |
|
RU2247671C1 |
| Электропривод подвесной канатной дороги | 1974 |
|
SU499160A1 |
| ПЕРЕДВИЖНАЯ ПАРООБРАЗУЮЩАЯ УСТАНОВКА | 2000 |
|
RU2184854C1 |
| DE 3213024 А1, 11.11.1982. | |||

