[0001] По настоящей заявке испрашивается приоритет предварительной заявки США №61/085757, озаглавленной «JOINT HIGHLY DETECTABLE PILOT AND INTERFERENCE CANCELLATION FOR CELLULAR POSITIONING», поданной 01 Августа 2008г., правообладателем которой является правообладатель настоящей заявки и которая включена в настоящее описание посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение в целом относится к связи и более конкретно к технологиям обнаружения сот в сети беспроводной связи.
Предпосылки создания изобретения
[0003] Сети беспроводной связи широко применяются для предоставления различного контента (содержания) связи, такого как: голосовое содержание, видео, пакетные данные, обмен сообщениями, вещание и т.д. Эти беспроводные сети могут быть сетями множественного доступа, выполненными с возможностью поддержки множества пользователей посредством совместного использования доступных ресурсов сети. Примеры таких сетей множественного доступа включают в себя: сети Множественного Доступа с Кодовым Разделением (CDMA); сети Множественного Доступа с Временным Разделением (TDMA); сети Множественного Доступа с Частотным Разделением (FDMA); сети Ортогонального FDMA (OFDMA) и сети FDMA с Одной Несущей (SC-FDMA).
[0004] Сеть беспроводной связи может включать в себя некоторое число сот, которые могут обеспечивать связь для некоторого числа оборудований пользователя (UE). UE может находиться внутри зоны покрытия одной или более сот в любой заданный момент времени, например, в зависимости от текущего местоположения UE. UE может не знать, какие соты находятся поблизости. UE может выполнить поиск, чтобы обнаружить соты и получить информацию синхронизации и прочую информацию в отношении обнаруженных сот. Может быть востребованным обнаружить соты таким образом, чтобы получить хорошую эффективность, например, обнаружить как можно больше сот.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Здесь описаны технологии выполнения обнаружения соты при помощи подавления помех. В одном аспекте UE может обнаружить пилот-сигналы от сот в беспроводной сети, используя подавление помех, которое может позволить UE обнаружить пилот-сигналы для большего числа сот. Применительно к обнаружению соты при помощи подавления помех UE может обработать принятый сигнал, чтобы обнаружить пилот-сигналы от одной или более сот. Пилот-сигналы могут представлять собой общие пилот-сигналы, передаваемые с коэффициентом повторного использования равным единице, или пилот-сигналы с низким повторным использованием, передаваемые с коэффициентом повторного использования больше единицы. UE может оценить помехи, вызванные обнаруженной сотой (например, наиболее сильной обнаруженной сотой), и может подавить оцененные помехи в принятом сигнале. Затем UE может обработать сигнал с подавленными помехами, чтобы обнаружить пилот-сигналы от дополнительных сот. UE может иметь возможность обнаружить пилот-сигналы от большего числа сот, например, от более слабых сот, посредством подавления помех, вызванных пилот-сигналами от обнаруженных сот. Это может быть востребованным для различных приложений, таких как позиционирование.
[0006] Различные аспекты и признаки изобретения описаны более подробно ниже.
ПЕРЕЧЕНЬ ФИГУР
[0007] Фиг.1 показывает сеть беспроводной связи.
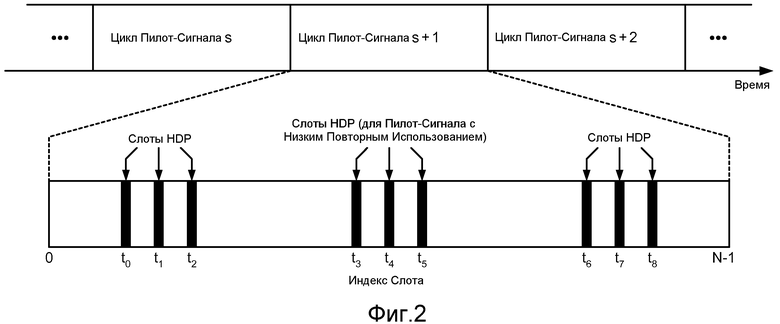
[0008] Фиг.2 показывает характерную структуру передачи для пилот-сигнала с низким повторным использованием.
[0009] Фиг.3 показывает передачу одной сотой пилот-сигнала с низким повторным использованием.
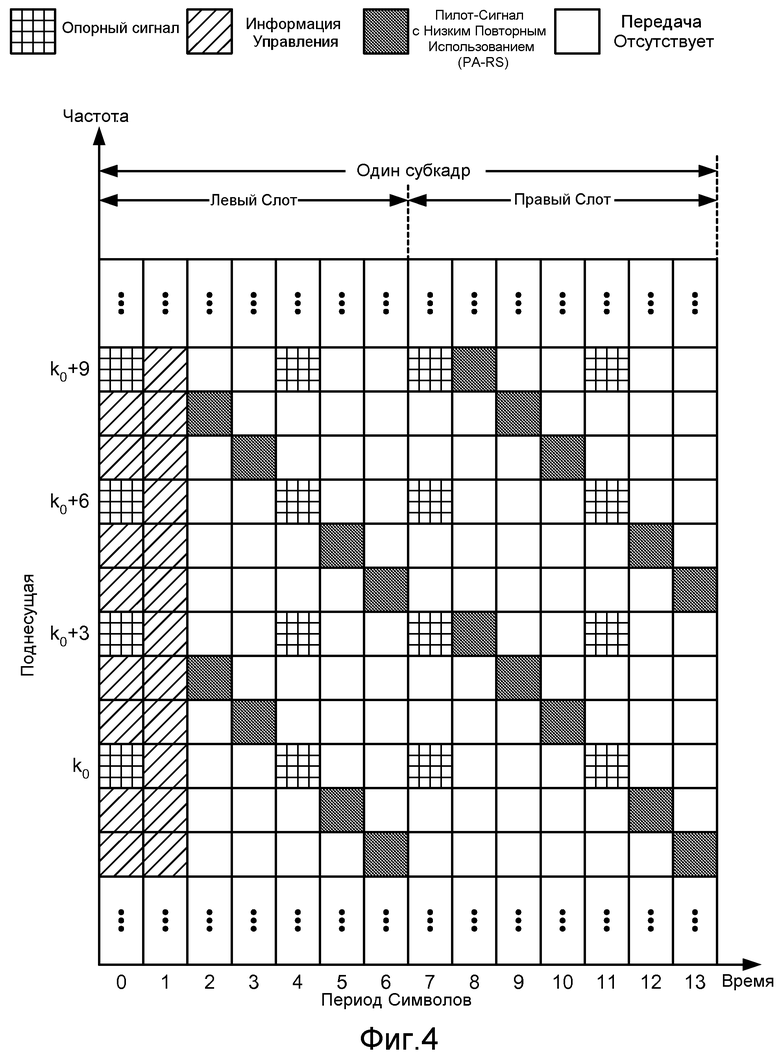
[0010] Фиг.4 показывает другую характерную структуру передачи для пилот-сигнала с низким повторным использованием.
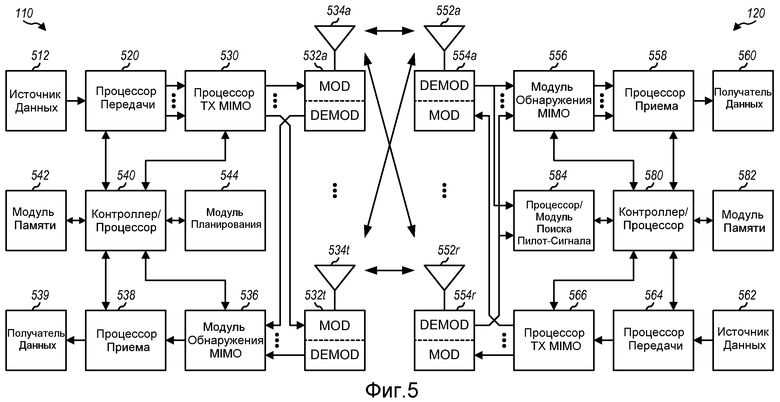
[0011] Фиг.5 показывает структурную схему базовой станции и UE.
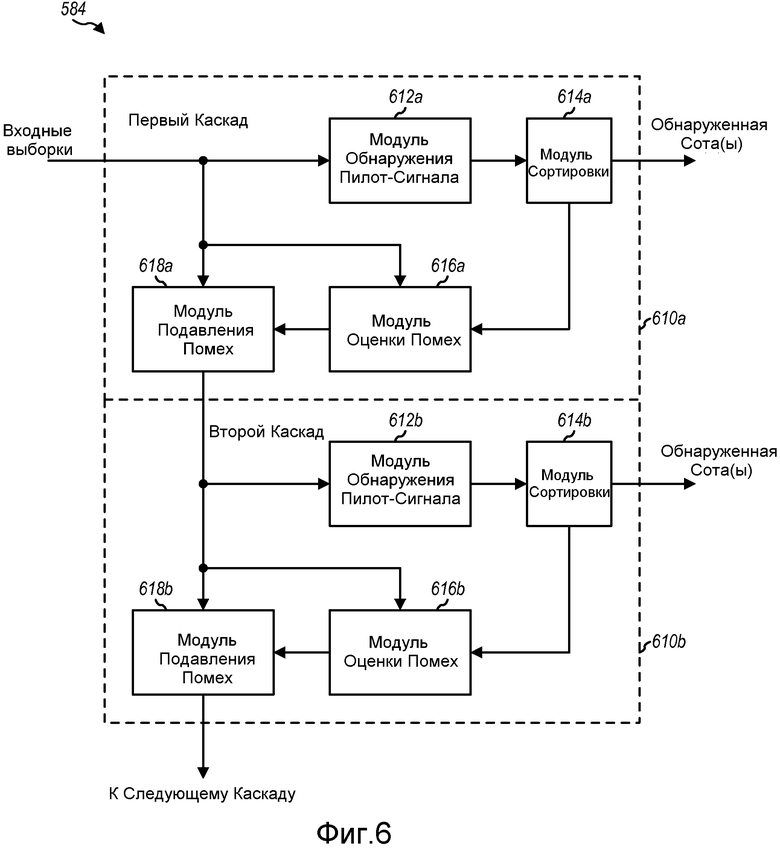
[0012] Фиг.6 показывает структурную схему процессора/модуля поиска в UE.
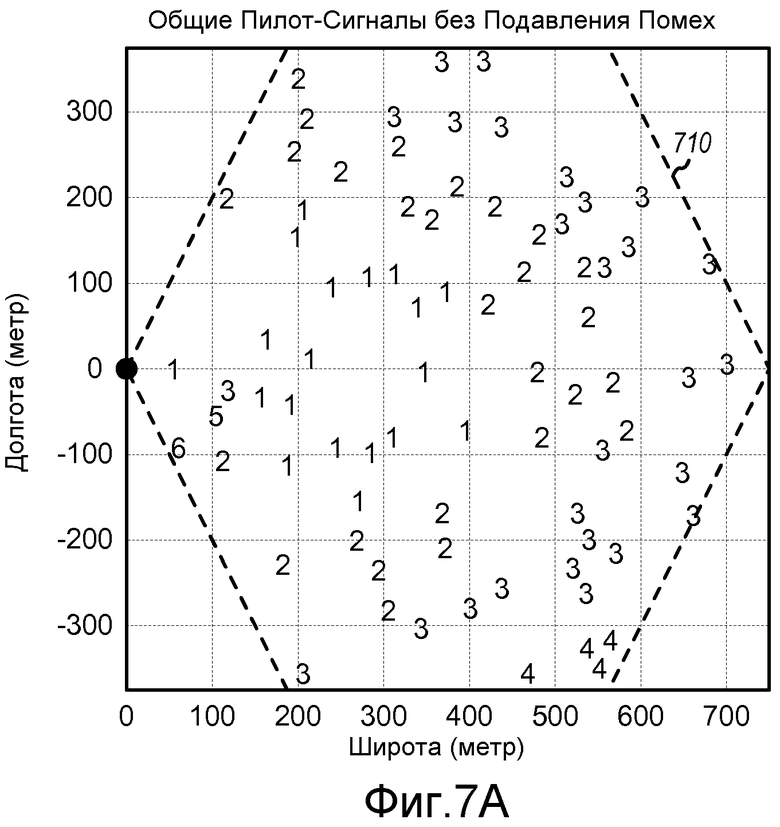
[0013]Фиг.7A-7D показывают эффективность обнаружения для четырех схем обнаружения соты для общих пилот-сигналов и пилот-сигналов с низким повторным использованием, с и без подавления помех.
[0014] Фиг.8 показывает графики функции кумулятивного распределения (CDF) числа обнаруженных сот применительно к четырем схемам обнаружения сот.
[0015] Фиг.9 показывает графики CDF ошибки определения местоположения применительно к четырем схемам обнаружения сот.
[0016] Фиг.10 показывает процесс выполнения обнаружения соты посредством UE.
[0017] Фиг.11 показывает процесс выполнения последовательного обнаружения и подавления.
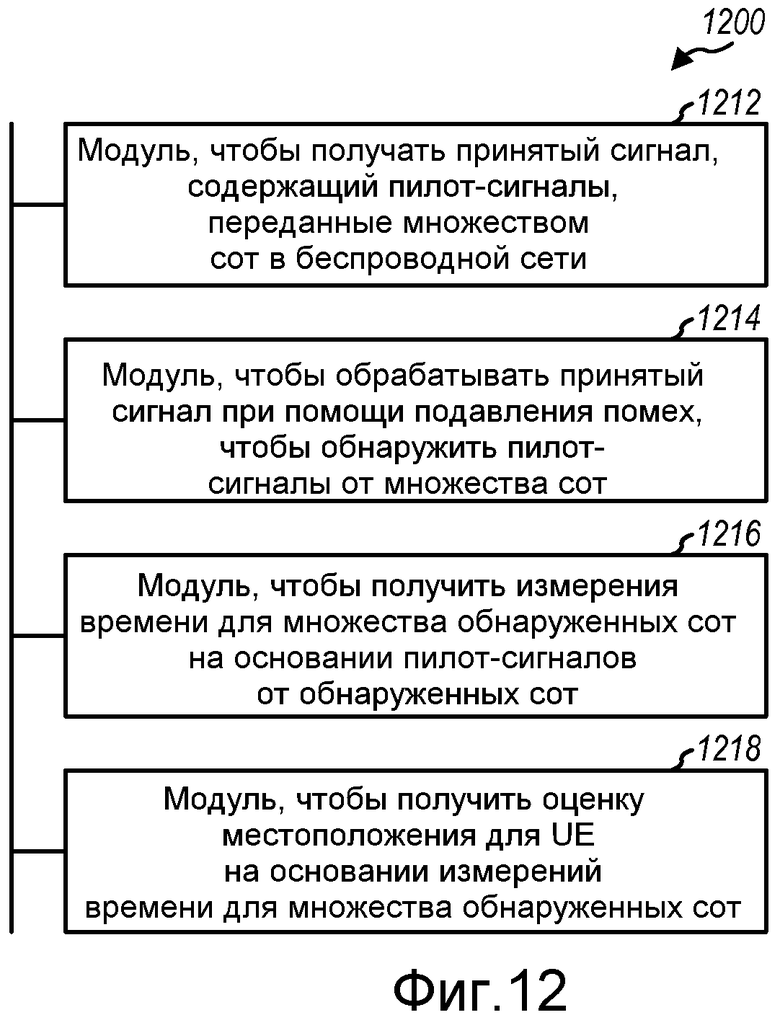
[0018] Фиг.12 показывает устройство для выполнения обнаружения соты.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0019] Описанные здесь технологии могут использоваться для различных сетей беспроводной связи, таких как CDMA, TDMA, FDMA, OFDMA, SC-FDMA и прочих сетей. Понятие «сеть» и «система» часто используются взаимозаменяемо. Сеть CDMA может реализовывать технологию радиодоступа, такую как Универсального Наземного Радиодоступа (UTRA), cdma2000 и т.д. Технология UTRA включает в себя Широкополосный CDMA (WCDMA) и прочие варианты CDMA. Технология cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. Сеть TDMA может реализовывать технологию радиодоступа, такую как Глобальная Система Связи с Мобильными объектами (GSM). Сеть OFDMA может реализовывать технологию радиодоступа, такую как Выделенного UTRA (E-UTRA), Сверхмобильного Широкополосного Доступа (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM®, и т.д. Технологии UTRA и E-UTRA являются частями Универсальной Системы Мобильной Связи (UMTS). 3GPP Долгосрочного Развития (LTE) и Расширенное-LTE (LTE-A) являются версиями UMTS, которая использует E-UTRA, которая в свою очередь использует OFDMA по нисходящей линии связи и SC-FDMA по восходящей линии связи. UTRA, E-UTRA, UMTS, LTE, LTE-A и GSM описаны в документах организации, именуемой «Проект Партнерства Третьего Поколения» (3GPP). cdma2000 и UMB описаны в документах организации, именуемой «Второй Проект Партнерства Третьего Поколения» (3GPP2). Описанные здесь технологии могут использоваться применительно к беспроводным сетям и технологиям радиодоступа, упомянутым выше, а также к другим беспроводным сетям и технологиям радиодоступа.
[0020] Фиг.1 показывает сеть 100 беспроводной связи с множеством базовых станций 110. Базовая станция может быть станцией, которая осуществляет связь с UE, и может так же именоваться как Узел Б, выделенный Узел Б (eNB), точка доступа и т.д. Каждая базовая станция 110 может обеспечивать зону покрытия связью для конкретной географической зоны. В 3GPP понятие «сота» может относиться к зоне покрытия базовой станции и/или подсистеме базовой станции, обслуживающей эту зону покрытия, в зависимости от контекста, в котором используется понятие. В 3GPP2 понятие «сектор» или «сектор соты» может относиться к зоне покрытия базовой станции и/или подсистеме базовой станции, обслуживающей эту зону покрытия. Для ясности, в описании ниже используется концепция «соты» принятая в 3GPP2. Базовая станция может поддерживать одну или множество (например, три) соты.
[0021] Беспроводная сеть 100 может быть однородной сетью, которая включает в себя базовые станции одного типа, например, только макробазовые станции. Также беспроводная сеть 100 может быть неоднородной сетью, которая включает в себя базовые станции разных типов, например макро-, пико- и/или фемтобазовые станции, которые обеспечивают покрытие для макро-, пико- и/или фемтосот соответственно. Макробазовая станция может покрывать относительно большую географическую зону (например, радиусом в несколько километров) и может предоставлять неограниченный доступ терминалам с подпиской на услугу. Пикобазовая станция может покрывать относительно малую географическую зону и может предоставлять неограниченный доступ терминалам с подпиской на услугу. Фемто или домашняя базовая станция может покрывать относительно малую географическую зону (например, дом) и предоставлять ограниченный доступ терминалам, имеющим привязку к фемтосоте (например, терминалам для пользователей в доме). Беспроводная сеть 100 также может включать в себя станции ретрансляции. Описанные здесь технологии могут использоваться как в однородных, так и неоднородных сетях. Контроллер 130 сети может связывать группу базовых станций и обеспечивать координацию и управление для базовых станций.
[0022] UE 120 могут быть рассредоточены внутри беспроводной сети 100, и каждое UE может быть стационарным или мобильным. Также UE может именоваться как мобильная станция, терминал, модуль абонента, станция и т.д. UE может быть сотовым телефоном, персональным цифровым помощником (PDA), беспроводным модемом, устройством беспроводной связи, переносным устройством, компьютером класса лэптоп, беспроводным телефоном, станцией беспроводной местной линии (WLL) и т.д. UE может осуществлять связь с базовой станцией по нисходящей линии связи и восходящей линии связи. Нисходящая линия связи (или прямая линия связи) относится к линии связи от базовой станции к UE, восходящая линия связи (или обратная линия связи) относится к линии связи от UE к базовой станции. На фиг.1 сплошная линия с одной стрелкой указывает UE, принимающее передачу данных от обслуживающей соты, а пунктирная линия с одной стрелкой указывает UE, принимающее пилот-сигнал от соты. На Фиг.1 передачи по восходящей линии связи не показаны.
[0023] Беспроводная сеть 100 может использовать коэффициент повторного использования, равный единице, что означает, что заданный канал частоты может использоваться всеми сотами в беспроводной сети. Использование коэффициента повторного использования, равного единице, может повысить спектральную эффективность, а также может уменьшить сложность планирования частот в беспроводной сети 100.
[0024] Каждая сота в беспроводной сети 100 может передавать общий пилот-сигнал, который может использоваться UE для обнаружения соты, синхронизации по времени, оценки канала и т.д. Пилот-сигнал является сигналом или передачей, которая заранее известна передатчику и приемнику. Пилот-сигнал также может именоваться как опорный сигнал, преамбула и т.д. Общий пилот-сигнал является пилот-сигналом, передаваемым всем UE. Общий пилот-сигнал также может именоваться как опорный сигнал конкретной соты и т.д.
[0025] Каждая сота также может передавать пилот-сигнал с низким повторным использованием (LRP), который может иметь более широкую зону покрытия и лучшую слышимость в сравнении с общим пилот-сигналом. Пилот-сигнал с низким повторным использованием является пилот-сигналом, который передается с коэффициентом повторного использования больше единицы, так что только часть сот передает свои пилот-сигналы с низким повторным использованием в заданный момент времени и/или по заданному ресурсу частоты. Например, при коэффициенте M повторного использования, где M>1, одна из каждых M сот может передавать свой пилот-сигнал с низким повторным использованием по заданному ресурсу. Больший коэффициент повторного использования (т.е. большее значение M) соответствует меньшему повторному использованию и наоборот. Пилот-сигнал с низким повторным использованием от заданной соты может испытывать меньшее влияние помех со стороны пилот-сигналов с низким повторным использованием от прочих сот, что может позволить большему числу UE обнаруживать пилот-сигнал с низким повторным использованием. Пилот-сигнал с низким повторным использованием также может именоваться как пилот-сигнал с высокой вероятностью обнаружения (HDP), опорный сигнал поддержки позиционирования (PA-RS), преамбула с низким повторным использованием и т.д. UE может иметь возможность обнаруживать более удаленные соты на основании пилот-сигналов с низким повторным использованием, передаваемых этими сотами.
[0026] UE может испытывать трудности при обнаружении общих пилот-сигналов от соседних сот из-за сильных помех со стороны наиболее близких сот. Этот эффект «близко-далеко» может привести к проблемам слышимости, которые могут понизить точность основанного на сотовой сети позиционирования UE. Проблема слышимости может быть уменьшена посредством увеличения коэффициента расширения спектра пилот-сигнала, например, посредством передачи большего числа символов пилот-сигнала для общих пилот-сигналов по большему числу ресурсов и/или посредством передачи общих пилот-сигналов с более высокой мощностью передачи. Однако выигрыш от обработки пилот-сигнала может оказаться неосуществимым решением ввиду проблемы «близко-далеко» из-за ограничения по физическим ресурсам и/или по времени когерентности канала.
[0027] Пилот-сигналы с низким повторным использованием могут снизить неблагоприятное влияние доминирующей соты на обнаружение прочих сот. Соты могут передавать свои пилот-сигналы с низким повторным использованием в соответствии со схемой мультиплексирования. Каждая сота может передавать свой пилот-сигнал с низким повторным использованием с вероятностью p=1/M при каждой возможности LRP передачи и может передавать свой пилот-сигнал с низким повторным использованием один раз каждую M возможность LRP передачи. Каждая сота может передавать свой пилот-сигнал с низким повторным использованием различными способами. Некоторые примеры исполнений пилот-сигналов с низким повторным использованием описаны ниже.
[0028] Фиг.2 показывает характерную структуру передачи пилот-сигналов с низким повторным использованием в сети Высокоскоростной Пакетной Передачи Данных (HRDP), которая использует стандарт IS-856. В HRPD пилот-сигнал с низким повторным использованием может именоваться как пилот-сигнал с высокой вероятностью обнаружения (HDP). В HRPD временная шкала передачи применительно к нисходящей линии связи может быть разбита в единицах слотов, где каждый слот имеет продолжительность 1.667 миллисекунд (мс). Временная шкала передачи также может быть разбита на циклы пилот-сигнала с последовательно увеличивающимися индексами. Каждый цикл пилот-сигнала может охватывать N слотов с индексами от 0 до N-i, где N может быть равно 768, 2304 или некоторому другому значению. В каждом цикле пилот-сигнала, M слотов с индексами t0, t1,…,tM-1 могут быть доступны для отправки HDP и могут именоваться как слоты HDP. M может быть равно 9 (для HRPD, как показано на фиг.2) или некоторому другому значению. M может составлять небольшой процент от N, так что потери из-за HDP могут быть незначительными. М HDP слотов от t0 до tM-1 могут быть зависимыми от значения N и могут быть известными сотам и UE.
[0029] Заданная сота x может передавать свой HDP в одном слоте HDP в каждом цикле пилот-сигнала. Сота x может выбрать один слот HDP в каждом цикле пилот-сигнала на основании псевдослучайной функции в соответствии со следующим:
q=ƒ(PilotPN, Cell-ID, Time), уравнение (1)
уравнение (1)
где PilotPN является последовательностью псевдослучайных чисел (PN), назначенных соте,
Cell-ID является идентификационными данными соты,
Time обозначает абсолютное время,
ƒ( ) обозначает псевдослучайную функцию и
qє{0,…,M-1} является произвольным целым числом, которое определяет выбранный слот HDP.
[0030] Фиг.3 показывает передачу HDP одной сотой x в HRDP. Сота x может предоставить псевдослучайной функции свой PilotPN, свой Cell-ID и индекс s для цикла пилот-сигнала в отношении Time. При s цикле пилот-сигнала псевдослучайная функция может выдать значение q(s) и сота x может передать свой HDP в слоте tq(s). В следующем s+1 цикле пилот-сигнала псевдослучайная функция может выдать значение q(s+1) и сота x может передать свой HDP в слоте tq(s+1). Подобным образом сота x может передавать свой HDP в каждом последующем цикле пилот-сигнала.
[0031] Сота x может сформировать передачу HDP для слота HDP посредством расширения заранее установленной последовательности символов (например, состоящей из нулей) при помощи последовательности Уолша, масштабирования полученных в результате битов и кодирования отмасштабированных битов при помощи последовательности PN, назначенной соте x. Следовательно, передача HDP может нести в себе только назначенную последовательность PN.
[0032] Как показано на фиг.2 и 3, сота x может передать свой HDP в одном из M (например, M=9) доступных слотов HDP в каждом цикле пилот-сигнала. Следовательно, применительно к HDP в HRPD может быть получен коэффициент повторного использования, равный M. Кроме того, сота x может передавать свой HDP в разных слотах HDP в разных циклах пилот-сигнала для того, чтобы избежать непрерывных конфликтов с HDP от сильной соседней соты. Это свойство может позволить большему числу UE обнаруживать HDP от соты x. В противоположность все соты в сети HRPD могут передавать их общие пилот-сигналы в одни и те же временные сегменты пилот-сигнала в каждом слоте. Следовательно, общий пилот-сигнал от соты x может передаваться с коэффициентом повторного использования, равным единице, может испытывать большее влияние помех со стороны соседних сот и может иметь меньшую способность к возможности быть обнаруженным в сравнении с HDP от соты x.
[0033] Пилот-сигналы с низким повторным использованием также могут передаваться по нисходящей линии связи в LTE. LTE использует мультиплексирование с ортогональным частотным разделением (OFDM) по нисходящей линии связи и мультиплексирование с частотным разделением и одной несущей (SC-FDM) по восходящей линии связи. OFDM и SC-FDM разбивают ширину полосы системы на множество (K) ортогональных поднесущих, которые также обычно именуются как тоны, бины и т.д. Каждая поднесущая может быть подвергнута модуляции при помощи данных. В целом, символы модуляции отправляются в диапазоне частот при помощи OFDM и во временном интервале при помощи SC-FDM. Интервал между соседними поднесущими может быть фиксированным, а общее число (K) поднесущих может зависеть от ширины полосы системы. Например, интервал между поднесущими может составлять 15 кГц, а K может быть равно 83, 166, 333, 666 или 1333 для полосы пропускания 1.25, 2.5, 5,10 или 20 МГц соответственно.
[0034] Фиг.4 показывает характерную структуру передачи применительно к пилот-сигналам с низким повторным использованием в сети LTE. Пилот-сигнал с низким повторным использованием в LTE может именоваться как опорный сигнал поддержки позиционирования (PA-RS). В LTE временная шкала передачи применительно к нисходящей линии связи может быть разбита в единицах радиокадров. Каждый радиокадр может иметь продолжительность в 10 мс и может быть разбит на 10 субкадров с индексами от 0 до 9. Каждый субкадр может включать в себя два слота, а каждый слот может включать в себя семь периодов символов применительно к нормальному циклическому префиксу (как показано на Фиг.4) или шесть периодов символов для расширенного циклического префикса (не показаны на Фиг.4). 14 периодам символов в каждом субкадре при нормальном циклическом префиксе могут быть назначены индексы от 0 до 13. Каждый период символов может включать в себя некоторое число элементов ресурсов. Каждый элемент ресурса может охватывать одну поднесущую в одном периоде символов и может использоваться для отправки одного символа, который может быть действительным или составным значением.
[0035] Заданная сота x может передавать опорный сигнал конкретной соты (или просто опорный сигнал) по определенным поднесущим в определенные периоды символов каждого субкадра. В частности, применительно к случаю с двумя передающими антеннами с нормальным циклическим префиксом, сота x может передавать опорный сигнал по каждой третьей поднесущей, начиная с поднесущей k0 в периоды символов 0, 4, 7 и 11 каждого субкадра. Начальная поднесущая k0 может быть определена на основании идентификационных данных соты на физическом уровне (PCI) соты x. Сота x может передавать информацию управления в первых L периодах символов субкадра, с L=2 на фиг.4. В целом, L≤3 и может быть конфигурируемым для каждого субкадра.
[0036] Сота x также может передавать PA-RS в субкадре, предназначенном для передачи PA-RS. В исполнении, показанном на фиг.4, сота x может передавать PA-RS в каждом периоде символов, не используемом для опорного сигнала или информации управления. Период символов с передачей PA-RS может именоваться как период символов PA-RS. В каждом периоде символов PA-RS сота x может передавать PA-RS по каждой шестой поднесущей, начиная с конкретной поднесущей. В разных периодах символов PA-RS могут использоваться разные начальные поднесущие, например, как показано на фиг.4, чтобы предоставить возможность передачи PA-RS по всем или большей части общего числа из K поднесущих. Начальные поднесущие могут меняться в зависимости от времени, для того чтобы избежать непрерывных конфликтов с PA-RS от сильной соседней соты. Это может предоставить возможность UE получать более точное измерение применительно к соте x на основании PA-RS.
[0037] Сота x может формировать символ OFDM, содержащий передачу PA-RS, различными способами. В одном исполнении сота x может формировать последовательность выборок на основании ее ID соты, переставлять или перемешивать последовательность выборок, формировать символы модуляции на основании переставленных выборок, преобразовывать символы модуляции к поднесущим, используемым для PA-RS, и формировать символы OFDM при помощи преобразованных символов модуляции. Последовательность выборок может формироваться аналогичным образом, как и последовательность выборок сигнала синхронизации, чтобы уменьшить сложность реализации. Последовательность выборок может быть переставлена разными способами для разных периодов символов PA-RS. Сота x также может формировать символ OFDM с передачей PA-RS другими способами.
[0038] В исполнении, показанном на фиг.4, сота x может передавать свой PA-RS по каждой шестой поднесущей в каждый период символов PA-RS. Следовательно, для PA-RS в LTE может быть получен коэффициент повторного использования равный шести. Кроме того, сота x может передавать свой PA-RS по разным поднесущим в разные периоды символов PA-RS, чтобы избежать непрерывных конфликтов с PA-RS от сильной соседней соты. Также сота x может передавать свой PA-RS на более высоком уровне мощности передачи, так как ни одна другая передача не будут отправляться по другим поднесущим в каждый период PA-RS. Эти особенности могут позволить UE обнаруживать PA-RS от соты x. В противоположность, каждая сота в сети LTE может передавать свой опорный сигнал по каждой третьей поднесущей, например, как показано на фиг.4, для получения коэффициента повторного использования, равного трем. Тем не менее, опорный сигнал от каждой соты может испытывать влияние помех со стороны передач данных, отправленных соседними сотами, может иметь фактический коэффициент повторного использования, равный одному, и может иметь меньшую способность к возможности быть обнаруженным в сравнении с PA-RS от соты.
[0039] Фиг.2 и 3 показывают пример временного мультиплексирования применительно к пилот-сигналам с низким повторным использованием, чтобы снизить вероятность конфликта между пилот-сигналами с низким повторным использованием от сильных и слабых сот. Фиг.4 показывает пример частотного мультиплексирования применительно к пилот-сигналам с низким повторным использованием, чтобы снизить вероятность конфликта между пилот-сигналами с низким повторным использованием от сильных и слабых сот. Пилот-сигналы с низким повторным использованием также могут передаваться при помощи прочих схем мультиплексирования. В любом случае пилот-сигналы с низким повторным использованием могут предоставить UE возможность обнаруживать пилот-сигналы от большего числа сот, включая пилот-сигналы от слабых сот. Тем не менее, улучшенная слышимость достигается за счет того, что заданный ресурс (например, слот в HRPD или элемент ресурса в LTE) используется только частью сот в беспроводной сети.
[0040] В одном аспекте UE может обнаруживать пилот-сигналы от сот в беспроводной сети, используя подавление помех, что может позволить UE обнаруживать пилот-сигналы от большего числа сот. Применительно к обнаружению сот при помощи подавления помех, UE может обрабатывать принятый сигнал, чтобы обнаружить пилот-сигналы от одной или более сот. UE может оценить помехи, вызванные обнаруженной сотой (например, наиболее сильной обнаруженной сотой), и может подавить оцененные помехи в принятом сигнале. UE может иметь возможность обнаруживать пилот-сигналы от большего числа сот, например, от слабых сот, посредством подавления помех, вызванных пилот-сигналами от обнаруженных сот. Подавление помех может улучшить слышимость слабых сот и может использоваться как для пилот-сигналов с низким повторным использованием, так и общих пилот-сигналов.
[0041] Фиг.5 показывает структурную схему базовой станции 110 и UE 120, которые могут быть одной из базовых станций и одним из UE на фиг.1. Базовая станция 110 может поддерживать одну или более соты. Базовая станция 110 может быть оборудована Т антеннами с 534a по 534t, а UE 120 может быть оборудовано R антеннами с 552a по 552r, где, как правило, T≥1 и R≥1.
[0042] На базовой станции 110 процессор 520 передачи может принять данные для одного или более UE от источника 512 данных, обработать (например, закодировать, перемежать и преобразовать в соответствии с символами) данные для каждого UE и предоставить символы данных для всех UE. Процессор 520 передачи также может обработать информацию управления от контроллера/процессора 540 и предоставить символы управления. Процессор 520 передачи также может сформировать прочие пилот-сигналы или опорные сигналы для каждой соты, поддерживаемой базовой станцией 110. Процессор 530 передачи (TX) системы с многими входами и многими выходами (MIMO) может выполнить предварительное кодирование над символами данных, символами управления и/или символами пилот-сигнала, если применимо. Процессор 530 может предоставить Т выходных потоков символов Т модуляторам (MOD) с 532a по 532t. Каждый модулятор 532 может обработать соответствующий выходной поток символов (например, применительно к CDMA, OFDM и т.д.), чтобы получить выходной поток выборок. Каждый модулятор 532 может дополнительно обработать (например, преобразовать в аналоговый, усилить, отфильтровать и преобразовать с повышением частоты) выходной поток выборок, чтобы получить сигнал нисходящей линии связи. Т сигналов нисходящей линии связи от модуляторов с 532a по 532t могут передаваться через Т антенн с 534a по 534t соответственно.
[0043] На UE 120 антенны с 552a по 552r могут принимать сигналы нисходящей линии связи от базовой станции 110 и прочих базовых станций и могут предоставлять принятые сигналы демодуляторам (DEMOD) с 554a по 554r соответственно. Каждый демодулятор 554 может приводить в определенное состояние (например, фильтровать, усиливать, преобразовывать с понижением частоты и преобразовывать в цифровую форму) соответствующий принятый сигнал, чтобы получить входные выборки. Каждый демодулятор 554 может дополнительно обрабатывать входные выборки (например, применительно к CDMA, OFDM и т.д.), чтобы получить принятые символы. Модуль 556 обнаружения MIMO может получить принятые символы от всех R демодуляторов с 554a по 554r, выполнить, если применимо, над принятыми символами пространственную обработку приемника и предоставить обнаруженные символы. Процессор 558 приема может обработать (например, демодулировать, снять перемежение и декодировать) обнаруженные символы, предоставить декодированные данные в отношении UE 120 получателю 560 данных и предоставить декодированную информацию управления контроллеру/процессору 580. Процессор/модуль поиска 584 пилот-сигнала может принять входные выборки от всех демодуляторов 554 и может обнаружить пилот-сигналы от сот, как описано ниже.
[0044] По восходящей линии связи, в UE 120, процессор 564 передачи может принять и обработать данные от источника 562 данных и информацию управления (например, в отношении обнаруженных сот, измерений времени и т.д.) от контроллера/процессора 580. Процессор 564 передачи также может сформировать символы пилот-сигнала. Символы от процессора 564 передачи могут быть предварительно закодированы посредством процессора 566 TX MIMO, если применимо, дополнительно обработаны посредством модуляторов с 554a по 554r и переданы базовой станции 110. На базовой станции 110 сигналы восходящей линии связи от UE 120 и прочих UE могут быть приняты антеннами 534, обработанные посредством демодуляторов 532, обнаружены посредством модуля 536 обнаружения MIMO, если применимо, и дополнительно обработанные посредством процессора 538 приема, чтобы получить декодированные данные и информацию управления, переданную посредством UE.
[0045] Контроллеры/процессоры 540 и 580 могут управлять функционированием базовой станции 110 и UE 120 соответственно. Модули 542 и 582 памяти могут хранить данные и коды программы для базовой станции 110 и UE 120 соответственно. Модуль 544 планирования может планировать UE в отношении передачи данных по нисходящей линии связи и/или восходящей линии связи и может предоставлять разрешения на ресурсы планируемым UE.
[0046] Фиг.6 показывает структурную схему исполнения процессора/модуля поиска 584 пилот-сигнала на UE 120 с Фиг.5. В этом исполнении процессор 584 пилот-сигнала может выполнять обнаружение пилот-сигнала и подавление помех во множестве каскадов 610. Для простоты на фиг.6 показаны только два каскада 610a и 610b.
[0047] В первом каскаде 610a модуль 612a обнаружения пилот-сигнала может принять входные выборки от демодуляторов 554, обнаружить пилот-сигналы (например, пилот-сигналы с низким повторным использованием), переданные сотами, на основании входных выборок и предоставить интенсивность и синхронизацию применительно к каждой обнаруженной соте. Модуль 612a обнаружения пилот-сигнала может обнаружить пилот-сигналы способом, который зависит от того, каким образом пилот-сигналы формируются и передаются сотами. В одном исполнении модуль 612a обнаружения пилот-сигнала может локально сформировать последовательность выборок для пилот-сигнала от соты, которая обнаруживается. Локально сформированная последовательность выборок может быть сформирована для PN последовательности, назначенной соте в HRPD, символам OFDM, содержащим передачу PA-RS в LTE, и т.д. Модуль 612a обнаружения пилот-сигнала может коррелировать входные выборки с локально сформированной последовательностью выборок по разным смещениям во времени, чтобы получить результаты корреляции для разных смещений во времени для сот. Модуль 612a обнаружения пилот-сигнала может определить, что сота является обнаруженной, если результат корреляции для любого смещения во времени превышает порог обнаружения. В одном исполнении UE 120 может принять список потенциальных сот (например, от обслуживающей соты) и модуль 612a обнаружения пилот-сигнала может обнаружить каждую соту из списка. В другом исполнении модуль 612a обнаружения пилот-сигнала может обнаружить каждую возможную соту посредством перебора всех возможных ID сот, например, всех ID 504 сот в LTE. Для всех исполнений модуль 612a обнаружения пилот-сигнала может предоставить список обнаруженных сот, энергию и синхронизацию для каждой обнаруженной соты и/или прочую информацию. Энергия каждой выявленной соты может быть энергией пика корреляции для соты.
[0048] Модуль 614a сортировки может принять результаты поиска от модуля 612a обнаружения пилот-сигнала и может произвести сортировку энергий обнаруженных сот. Модуль 614a сортировки может выбрать одну или более обнаруженных сот для подавления помех и может предоставить идентификационные данные каждой выбранной соты модулю 616a оценки помех. Модуль 614a сортировки может выбрать одну или более сот для подавления помех различными способами, как описано выше.
[0049] Модуль 616a оценки помех может принять выбранную соту(ы) от модуля 614a сортировки и входные выборки и может оценить помехи, вызванные пилот-сигналом, от каждой выбранной соты. Чтобы оценить помехи, вызванные заданной выбранной сотой, модуль 616a оценки помех может получить оценку канала для выбранной соты на основании входных выборок (например, используя общий пилот-сигнал, переданный сотой). Модуль 616a оценки помех может локально сформировать пилот-сигнал от выбранной соты таким же образом, как если бы это делала сота, и может применить локально сформированный пилот-сигнал через оценку канала, чтобы получить оценку помех. Точность оценки помех может зависеть от точности оценки канала, которая может быть выше для сильной соты и/или после подавления помех от сильной соты.
[0050] Модуль 618a подавления помех может принять входные выборки и оцененные помехи для каждой выбранной соты от модуля 616a оценки помех. Модуль 618a подавления помех может вычесть оцененные помехи для каждой выбранной соты из входных выборок и может предоставить выборки с подавленными помехами второму каскаду 610b.
[0051] Второй каскад 610b включает в себя модуль 612b обнаружения пилот-сигнала, модуль 614b сортировки, модуль 616b оценки помех и модуль 618b подавления помех, которые могут обрабатывать выборки с подавленными помехами аналогичным образом, как модули в первом каскаде 610a. Модуль 612b обнаружения пилот-сигнала может обнаруживать пилот-сигналы (например, пилот-сигналы с низким повторным использованием) от сот, не обнаруженных или не исключенных в первом каскаде 610a. Модуль 614b сортировки может выбрать одну или более обнаруженных сот для подавления помех. Модуль 616b оценки помех может оценить помехи, вызванные каждой выбранной сотой. Модуль 618b подавления помех может подавить оцененные для каждой выбранной соты помехи из выборок с подавленными помехами и предоставить новые выборки с подавленными помехами следующему каскаду.
[0052] В целом, процессор 554 пилот-сигнала может включать в себя любое число каскадов 610 и может функционировать различными способами. В одном исполнении, процессор 584 пилот-сигнала может выполнять последовательное обнаружение и подавление (SDC), которое может быть одной схемой подавления помех. При помощи SDC процессор 584 пилот-сигнала может сортировать энергии всех обнаруженных сот в каждом каскаде и может выбирать наиболее сильную обнаруженную соту для подавления помех в этом каскаде. Выполнение обнаружения может быть улучшено посредством подавления помех от наиболее сильной соты в каждом каскаде и дальнейшей обработки выборок с подавленными помехами в следующем каскаде. Это может привести к более точной оценке помех от наиболее сильной соты, обнаруженной в следующем каскаде, на основании выборок с подавленными помехами, имеющих низкие помехи от наиболее сильной соты, обнаруженной в каждом предшествующем каскаде.
[0053] В другом исполнении процессор 584 пилот-сигнала может выполнять подавление помех в отношении всех выявленных сот в каждом каскаде. Для каждого каскада процессор 584 пилот-сигнала может оценить помехи, вызванные каждой обнаруженной в этом каскаде сотой, подавить помехи, вызванные всеми обнаруженными сотами, и предоставить выборки с подавленными помехами следующему каскаду. В еще одном другом исполнении процессор 584 пилот-сигнала может выполнить подавление помех применительно к заранее определенному числу наиболее сильных обнаруженных в каждом каскаде сот. В еще одном другом исполнении процессор 584 пилот-сигнала может выполнить подавление помех в каждом каскаде применительно ко всем обнаруженным сотам, энергия которых превышает пороговое значение. Пороговое значение может быть фиксированным значением, которое обеспечивает хорошую эффективность. Пороговое значение также может быть конфигурируемым значением, которое может быть установлено в качестве конкретного процента от общей, принятой UE, энергии. Процессор 584 пилот-сигнала также может выполнять подавление помех другими способами.
[0054] Процессор 584 пилот-сигнала может выполнять обнаружение пилот-сигнала и подавление помех во множестве каскадов, например, как показано на фиг.6. Процессор 584 пилот-сигнала может предоставлять результаты поиска для одной или более обнаруженных в каждом каскаде сот и также может подавлять помехи в отношении одной или более выбранной в каждом каскаде сот. Процессор 584 пилот-сигнала может повторять обнаружение пилот-сигнала и подавление помех до тех пор, пока не наступит условие завершения. Это условие завершения может наступить, когда будет обнаружено целевое число сот, когда будут обнаружены все соты из списка потенциальных сот, когда процессор 584 пилот-сигнала не сможет больше обнаружить сот, и т.д.
[0055] Эффективность обнаружения с использованием пилот-сигналов с низким повторным использованием и/или подавлением помех была установлена посредством компьютерного моделирования. Компьютерное моделирование моделирует сотовую сеть с 37 базовыми станциями, при этом каждая базовая станция имеет три соты, а каждая сота имеет радиус в 750 метров. В моделировании каждая сота передает общий пилот-сигнал с коэффициентом повторного использования, равным единице (M=1), а пилот-сигналы с низким повторным использованием передаются с коэффициентом повторного использования больше единицы (M>1). Следовательно, общий пилот-сигнал передается без мультиплексирования, а пилот-сигнал с низким повторным использованием передается с мультиплексированием. Некоторое число UE являются произвольно размещенными внутри центральной соты в сотовой сети. Каждое UE может обнаруживать общие пилот-сигналы или пилот-сигналы с низким повторным использованием с подавлением или без подавления помех.
[0056] Фиг.7A показывает эффективность обнаружения применительно к общим пилот-сигналам (M=1) без подавления помех на UE в заданной соте x. Зона покрытия соты x представлена в виде шестигранника 710, который является грубой аппроксимацией диаграммы направленности антенны для соты x. Сота x располагается на долготе 0 метров и широте 0 метров, т.е. в середине левой вертикальной оси. UE размещены в произвольно выбранных местоположениях внутри соты x. Эффективность обнаружения измеряется числом сот, которое UE могут обнаружить на основании общих пилот-сигналов без подавления помех. В частности, значение k в заданном местоположении на Фиг.7A указывает, что UE в этом местоположении может обнаружить k сот, где k может быть любым целочисленным значением.
[0057] Как показано на фиг.7A, слышимость общих пилот-сигналов без подавления помех, в целом, низкая. UE, расположенные рядом с центром соты x, могут обнаружить только одну или незначительное число сот из-за сильных помех со стороны соты x. UE, расположенные на границах соты x, могут иметь возможность обнаружить большее число сот из-за меньших помех со стороны соты x. Эффективность обнаружения на Фиг.7A может быть типичной для большинства сотовых сетей с коэффициентом повторного использования, равным единице.
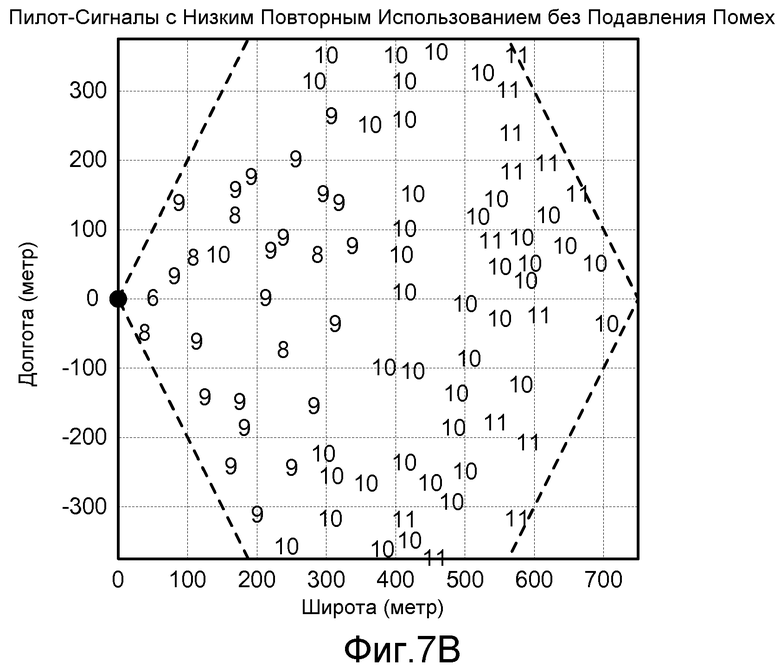
[0058] Фиг.7B показывает эффективность обнаружения применительно к пилот-сигналам с низким повторным использованием при коэффициенте повторного использования M=4 и без подавления помех на UE в соте x. Как показано на фиг.7B, слышимость пилот-сигналов с низким повторным использованием без подавления помех улучшена в сравнении со слышимостью общих пилот-сигналов на фиг.7A. UE, размещенные внутри соты x, могут обнаруживать девять и более сот в большинстве случаев. Улучшение в слышимости и количестве обнаруженных сот не зависит от местоположения UE, так как помехи со стороны соты x исключены в ресурсах (например, слотах HDP или элементах ресурса PA-RS), зарезервированных для пилот-сигналов с низким повторным использованием, но не используемых сотой x для своего пилот-сигнала с низким повторным использованием.
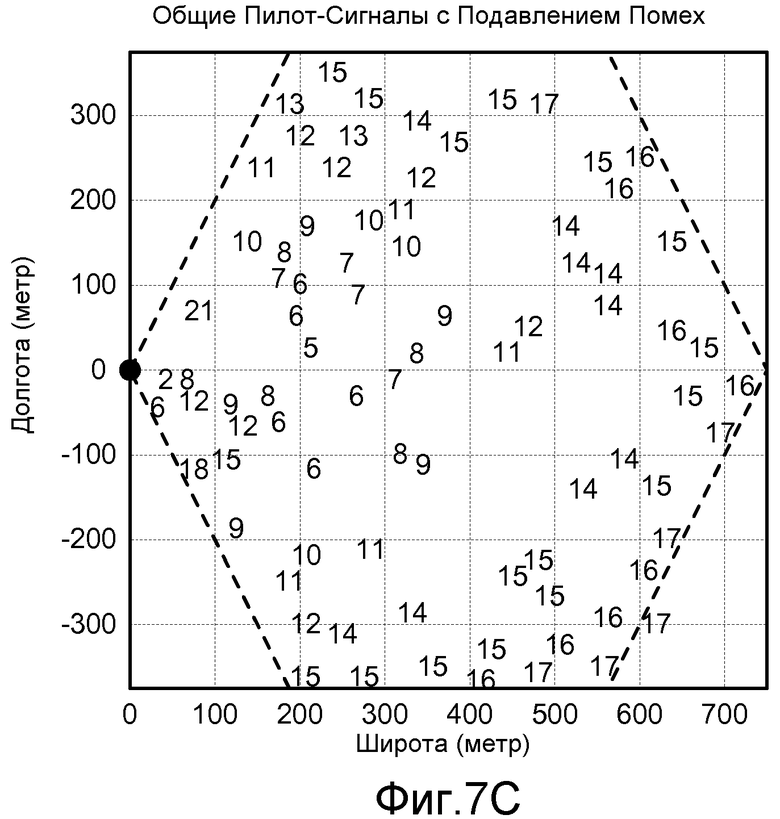
[0059] Фиг.7C показывает эффективность обнаружения применительно к общим пилот-сигналам (M=1) с подавлением помех на UE в соте x. Как показано на фиг.7C, слышимость общих пилот-сигналов с подавлением помех улучшена в сравнении со слышимостью общих пилот-сигналов без подавления помех на фиг.7A. UE, расположенные внутри соты x, как правило, могут обнаруживать большее число сот, чем UE, расположенные около центра соты x, из-за меньших помех со стороны соты x. Слышимость с подавлением помех может быть лучше в сравнении со слышимостью при использовании пилот-сигналов с низким повторным использованием, за исключением местоположений, близких к передатчику соты x.
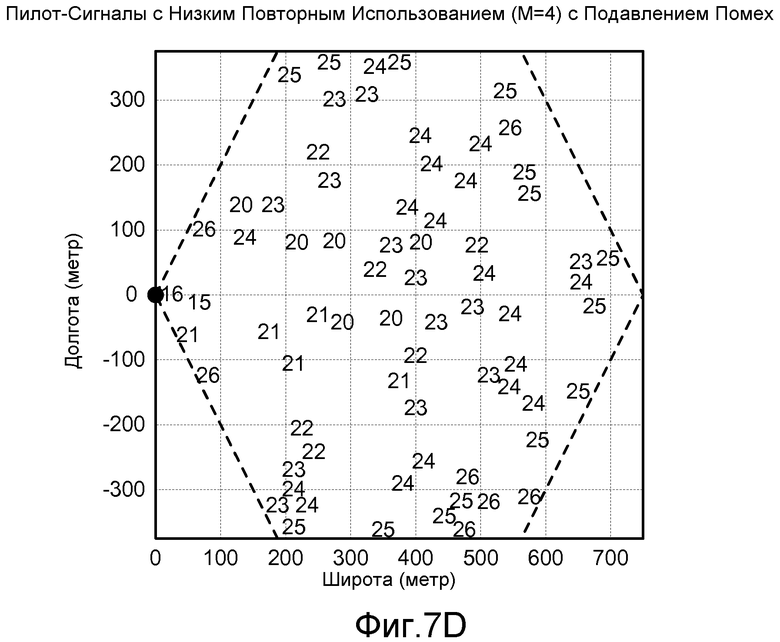
[0060] Фиг.7D показывает эффективность обнаружения применительно к пилот-сигналам с низким повторным использованием при коэффициенте повторного использования M=4 и подавлением помех на UE в соте x. Как показано на фиг.7D, слышимость пилот-сигналов с низким повторным использованием с подавлением помех намного улучшена в сравнении как (i) со слышимостью пилот-сигналов с низким повторным использованием без подавления помех на фиг.7B, так и (ii) со слышимостью общих пилот-сигналов с подавлением помех на фиг.7C. UE, расположенные внутри соты x, могут обнаруживать большее число сот на основании пилот-сигналов с низким повторным использованием с подавлением помех. Кроме того, улучшение в слышимости и количестве обнаруженных сот, в целом, не зависит от местоположений UE.
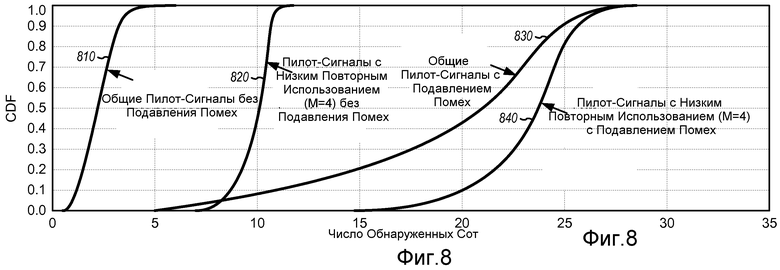
[0061] Фиг.8 показывает CDF числа обнаруженных сот применительно к четырем конфигурациям, показанным на фиг. с 7A по 7D. Горизонтальная ось представляет собой число обнаруженных сот, а вертикальная ось представляет собой CDF. График 810 показывает CDF числа обнаруженных сот применительно к общим пилот-сигналам без подавления помех, что соответствует конфигурации на фиг.7A. График 820 показывает CDF числа обнаруженных сот применительно к пилот-сигналам с низким повторным использованием при M=4 и отсутствии подавления помех, что соответствует конфигурации на фиг.7B. График 830 показывает CDF числа обнаруженных сот применительно к общим пилот-сигналам с подавлением помех, что соответствует конфигурации на фиг.7C. График 840 показывает CDF числа обнаруженных сот применительно к пилот-сигналам с низким повторным использованием при M=4 и подавлением помех, что соответствует конфигурации на фиг.7D. Как показано на фиг.8, число обнаруженных сот может значительно увеличиться при использовании пилот-сигналов с низким повторным использованием и/или подавления помех.
[0062] В целом, эффективность обнаружения может быть улучшена посредством использования мультиплексирования с более высоким коэффициентом повторного использования. Прогрессивно больший коэффициент повторного использования может привести к прогрессивно лучшей слышимости, но также может потребовать больше служебной нагрузки для пилот-сигналов с низким повторным использованием. Более высокий коэффициент повторного использования может дополнительно привести к более длительным задержкам при получении оценки местоположения на основании обнаруженных пилот-сигналов с низким повторным использованием. Мультиплексирование может быть более эффективным применительно к улучшению слышимости в местоположениях с сильным доминирующим пилот-сигналом, например, вблизи передатчика соты. Мультиплексирование также может привести к более равномерной слышимости внутри соты, например, как показано на фиг.7B.
[0063] Эффективность обнаружения также может быть улучшена посредством использования подавления помех, которое может быть применимо как для общих пилот-сигналов, так и для пилот-сигналов с низким повторным использованием. Подавление помех может обеспечить хорошую эффективность обнаружения даже с малым коэффициентом повторного использования. Может быть показано, что эффективность обнаружения применительно к пилот-сигналам с низким повторным использованием при M=4 и подавлением помех лучше, чем эффективность обнаружения применительно к пилот-сигналам с низким повторным использованием при M=8 и отсутствием подавления помех. Следовательно, подавление помех может использоваться, чтобы улучшить эффективность обнаружения и/или уменьшить коэффициент M повторного использования.
[0064] Описанные здесь технологии могут использоваться для различных приложений, таких как позиционирование UE. UE может обнаружить пилот-сигналы (например, пилот-сигналы с низким повторным использованием) от разных сот при помощи подавления помех, чтобы увеличить число сот, которые могут быть обнаружены. UE может получить измерение времени (например, измерение времени прихода (TOA)) на основании пилот-сигнала от каждой обнаруженной соты. Оценка местоположения для UE может быть получена на основании измерений времени применительно к обнаруженным сотам и их известных местоположений, используя трилатерацию. Точность оценки местоположения может быть повышена, и ошибка определения местоположения может быть уменьшена при помощи большего числа обнаруженных сот.
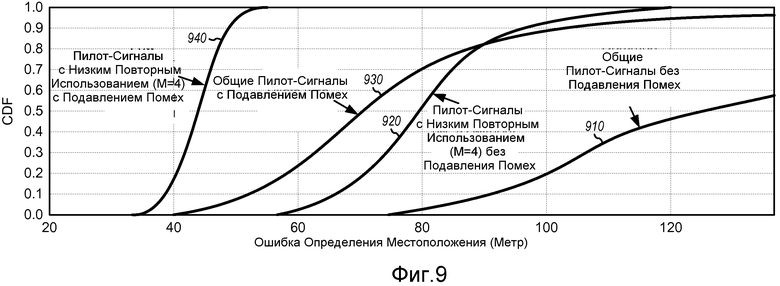
[0065] Фиг.9 показывает CDF ошибки определения местоположения применительно к оценке местоположения, полученной при помощи четырех конфигураций, показанных на фиг.7A-7D. Горизонтальная ось представляет собой ошибку определения местоположения в единицах измерения - метрах, а вертикальная ось представляет собой CDF. График 910 показывает CDF ошибки определения местоположения при помощи общих пилот-сигналов и отсутствии подавления помех. График 920 показывает CDF ошибки определения местоположения при помощи пилот-сигналов с низким повторным использованием при M=4 и отсутствии подавления помех. График 930 показывает CDF ошибки определения местоположения при помощи общих пилот-сигналов и подавления помех. График 940 показывает CDF ошибки определения местоположения при помощи пилот-сигналов с низким повторным использованием при M=4 и подавления помех. Как показано на фиг.9, ошибка определения местоположения может быть значительно снижена при использовании пилот-сигналов с низким повторным использованием и/или подавлением помех.
[0066] Как показано на фиг.7A -9, подавление помех может уменьшить неблагоприятное влияние эффекта «близко-далеко» посредством подавления помех со стороны сильных сот, чтобы улучшить слышимость более слабых сот. Пилот-сигналы с низким повторным использованием при коэффициенте повторного использования больше единицы могут улучшить слышимость внутри соты, сделав ее равномерной. Совместное использование пилот-сигналов с низким повторным использованием и подавления помех может значительно улучшить эффективность обнаружения. Применительно к заданной эффективности обнаружения коэффициент повторного использования в отношении пилот-сигналов с низким повторным использованием может быть уменьшен посредством использования подавления помех. Меньший коэффициент повторного использования может снизить потери применительно к пилот-сигналам с низким повторным использованием; позволить более быстрое обнаружение пилот-сигналов с низким повторным использованием от разных сот и уменьшить задержку при получении оценки местоположения для UE, и все из этого может быть крайне востребовано. Кроме того, более точная оценка местоположения может быть получена при помощи большего числа обнаруженных сот благодаря использованию пилот-сигналов с низким повторным использованием и/или подавления помех.
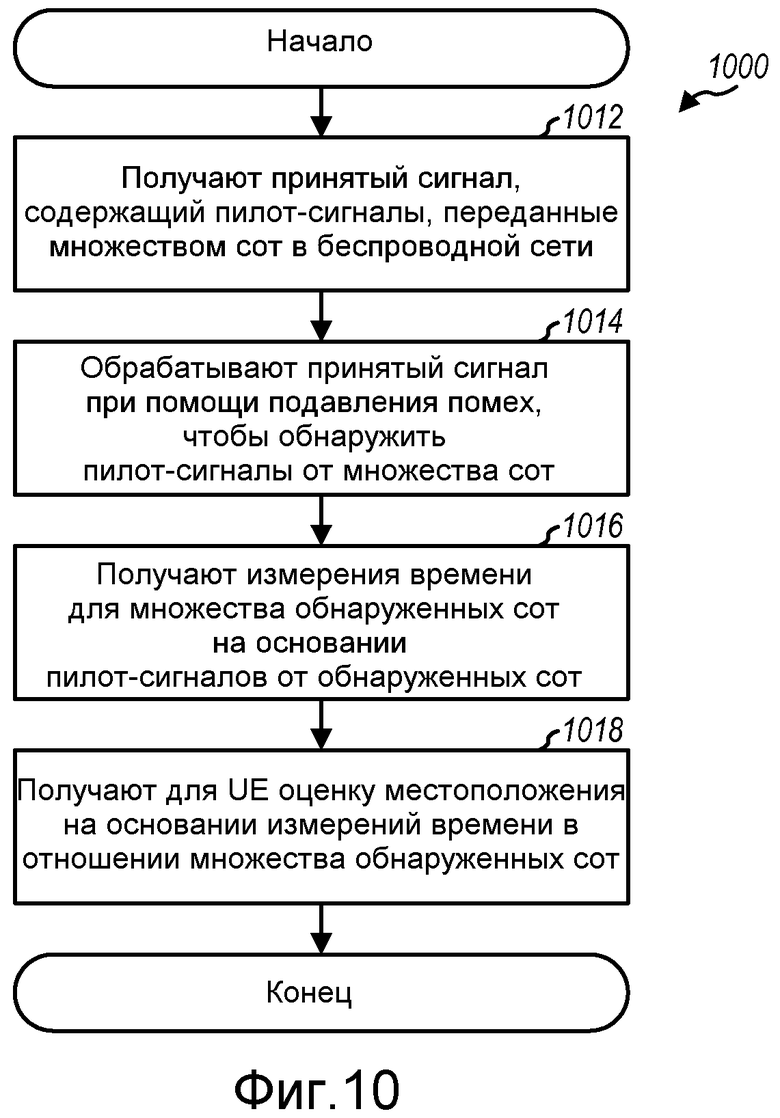
[0067] Фиг.10 показывает исполнение процесса 1000 для выполнения обнаружения соты посредством UE. UE может получить принятый сигнал, содержащий пилот-сигналы, переданные множеством сот в беспроводной сети (этап 1012). UE может обработать принятый сигнал при помощи подавления помех, чтобы обнаружить пилот-сигналы от множества сот (блок 1014). Подавление помех может увеличить число обнаруженных сот. В одном исполнении пилот-сигналы могут представлять собой общие пилот-сигналы, переданные множеством сот с коэффициентом повторного использования, равным единице. В другом исполнении пилот-сигналы могут представлять собой пилот-сигналы с низким повторным использованием, переданные множеством сот с коэффициентом повторного использования больше единицы. Каждая сота может передавать свой пилот-сигнал с низким повторным использованием по подмножеству временных слотов, доступных для передачи пилот-сигналов с низким повторным использованием (например, как показано на фиг.3), или по подмножеству поднесущих, доступных для передачи пилот-сигналов с низким повторным использованием (например, как показано на фиг.4), или по прочим ресурсам, доступным для передачи пилот-сигналов с низким повторным использованием.
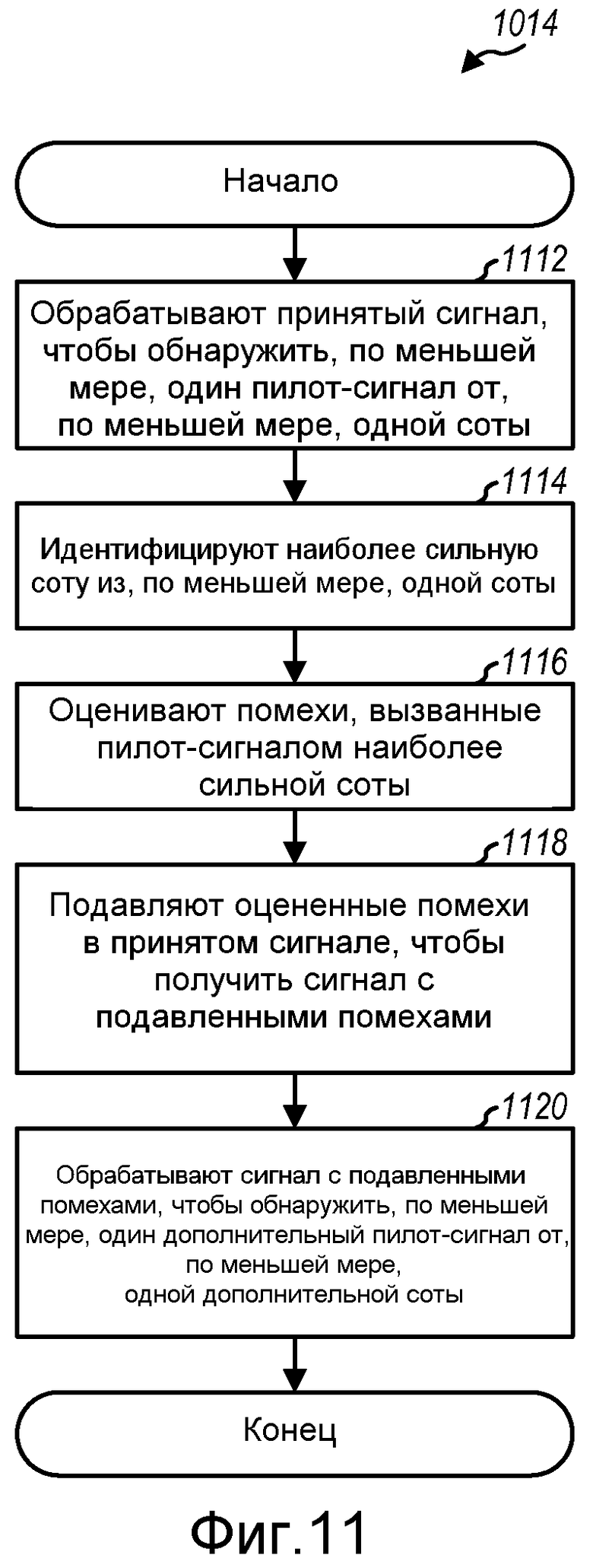
[0068] Фиг.11 показывает исполнение этапа 1014 на Фиг.10, который реализует последовательное обнаружение и подавление (SDC) применительно к подавлению помех. UE может обработать принятый сигнал, чтобы обнаружить, по меньшей мере, один пилот-сигнал от, по меньшей мере, одной соты (этап 1112). UE может идентифицировать наиболее сильную соту из, по меньшей мере, одной соты (этап 1114). Затем UE может оценить помехи, вызванные пилот-сигналом наиболее сильной соты (этап 1116). UE может подавить оцененные помехи в принятом сигнале, чтобы получить сигнал с подавленными помехами (этап 1118). Затем UE может обработать сигнал с подавленными помехами, чтобы обнаружить, по меньшей мере, один дополнительный пилот-сигнал от, по меньшей мере, одной дополнительной соты (этап 1120). UE может повторить этапы с 1114 по 1120 для любого числа сот.
[0069] В другом исполнении этапа 1014 на фиг.10 UE может выполнить обнаружение пилот-сигнала и подавление помех во множестве каскадов, например, как показано на фиг.6. Для каждого каскада UE может обнаружить один или более пилот-сигналов от одной или более сот и может выбрать, по меньшей мере, одну соту для подавления помех из одной или более обнаруженных сот. Выбранная сота(ы) может быть наиболее сильной сотой или может быть определена, как описано выше. UE может подавить помехи, вызванные, по меньшей мере, одной выбранной сотой. Применительно к каждой выбранной соте, UE может получить оценку канала для выбранной соты после подавления помех, вызванных ранее выбранными сотами, сформировать пилот-сигнал в отношении выбранной соты, оценить помехи, вызванные выбранной сотой, на основании сформированного пилот-сигнала и оценки канала для выбранной соты и подавить оцененные помехи. UE может завершить обнаружение пилот-сигнала и подавление помех, когда больше не может быть обнаружен ни один пилот-сигнал, или когда был обнаружен список сот, или когда было обнаружено заранее установленное число сот, или когда встречается другое условие завершения.
[0070] Согласно фиг.10 в одном исполнении UE может получить измерения времени для множества обнаруженных сот на основании пилот-сигналов от этих сот (этап 1016). Затем UE может получить для себя оценку местоположения на основании измерений времени в отношении множества обнаруженных сот (этап 1018). UE может вычислить оценку местоположения на основании измерений времени и известных местоположений обнаруженных сот, например, используя трилатерацию. В качестве альтернативы, UE может отправить измерения времени в сеть, которая может вычислить оценку местоположения для UE. В другом исполнении UE может идентифицировать множество обнаруженных сот и может получить для себя оценку местоположения на основании идентификационных данных обнаруженных сот, например, используя улучшенный способ позиционирования на основании ID сот. Применительно ко всем исполнениям оценка местоположения может иметь повышенную точность из-за большего числа обнаруженных при помощи подавления помех сот.
[0071] Фиг.12 показывает исполнение устройства 1200 для выполнения обнаружения сот. Устройство 1200 включает в себя модуль 1212, чтобы получать принятый сигнал, содержащий пилот-сигналы, переданные множеством сот в беспроводной сети, модуль 1214, чтобы обрабатывать принятый сигнал при помощи подавления помех, чтобы обнаружить пилот-сигналы от множества сот, модуль 1216, чтобы получить измерения времени для множества обнаруженных сот на основании пилот-сигналов от обнаруженных сот, и модуль 1218, чтобы получить оценку местоположения для UE на основании измерений времени для обнаруженных сот.
[0072] Модули на фиг.12 могут быть выполнены в виде процессоров, электронных устройств, устройств аппаратного обеспечения, электронных компонентов, логических схем, памятей, кодов программного обеспечения, кодов встроенного программного обеспечения и т.д. или любого их сочетания.
[0073] Специалист в соответствующей области должен понимать, что информация и сигналы могут быть представлены, используя любые из многообразия различных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и импульсы, которые могли упоминаться в описании выше, могут быть представлены напряжениями, несущими, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любым их сочетанием.
[0074] Специалист в соответствующей области дополнительно должен принимать во внимание, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные здесь применительно к изобретению, могут быть реализованы в качестве электронного аппаратного обеспечения, компьютерного программного обеспечения или их сочетания. Для того чтобы однозначно проиллюстрировать эту взаимозаменяемость аппаратного и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы, в целом, были описаны выше, исходя из их функциональных возможностей. Будут ли такие функциональные возможности реализованы в аппаратном или программном обеспечении, зависит от конкретного применения и ограничений на исполнение, наложенных на всю систему. Специалисты могут реализовать описанные функциональные возможности различными способами для каждого конкретного применения, но такие решения реализации не должны интерпретироваться как вызывающие отступление от объема настоящего изобретения.
[0075] Различные иллюстративные логические блоки, модули и схемы, описанные здесь в отношении изобретения, могут быть реализованы или выполнены процессором общего назначения, цифровым сигнальным процессором (DSP), проблемно-ориентированной интегральной микросхемой (ASIC), программируемой вентильной матрицей (FPGA) или прочим программируемым логическим устройством, схемой на дискретных компонентах или транзисторной логикой, дискретными компонентами аппаратного обеспечения или любым их сочетанием, разработанным для выполнения описанных здесь функций. Процессор общего назначения может быть микропроцессором, но в качестве альтернативы процессор может быть любым обычным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован в качестве комбинации вычислительных устройств, например, комбинации DSP и микропроцессора, множеством микропроцессоров, одним или более микропроцессорами, объединенными с ядром DSP, или любой подобной конфигурации.
[0076] Этапы способа или алгоритма, описанные в отношении настоящего изобретения, могут быть реализованы непосредственно в аппаратном обеспечении, в модуле программного обеспечения, выполняемом процессором или в сочетании того и другого. Модуль программного обеспечения может размещаться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, регистрах, жестком диске, съемном диске, CD-ROM или любом другом виде носителя данных, известного в данной области техники. Характерный носитель данных объединен с процессором таким образом, чтобы процессор мог считывать информацию с и записывать информацию на носитель данных. В качестве альтернативы, носитель данных может быть неотъемлемой частью процессора. Процессор и носитель данных могут размещаться на ASIC. ASIC может размещаться в терминале пользователя. В качестве альтернативы, процессор и носитель данных могут размещаться в терминале пользователя как отдельные компоненты.
[0077] В одном или более характерных исполнениях описанные функции могут быть реализованы в аппаратном обеспечении, программном обеспечении, встроенном программном обеспечении или любом их сочетании. При реализации в программном обеспечении функции могут храниться или передаваться в качестве одной или более инструкций или кода на машиночитаемом носителе информации. Машиночитаемый носитель информации включает в себя как компьютерный носитель данных, так и средства связи, включая любое средство связи, которые способствуют передаче компьютерной программы из одного места в другое. Носитель данных может быть любым приемлемым носителем, доступ к которому можно получить посредством компьютера общего назначения или специализированного компьютера. В качестве примера, а не ограничения, такой машиночитаемый носитель информации может быть выполнен в виде RAM, ROM, EEPROM, CD-ROM или другого накопителя на оптическом диске, накопителя на магнитном диске или других устройств хранения на магнитном носителе, или любом другом носителе, который может использоваться для переноса или хранения требуемого кода программы в виде инструкций или структур данных и доступ к которому может быть получен посредством компьютера общего назначения или специализированного компьютера, или процессором общего назначения, или специализированным процессором. Также любое подсоединение должным образом определяет машиночитаемый носитель информации. Например, если программное обеспечение передается с web-узла, сервера или другого удаленного источника, используя коаксиальный кабель, волоконно-оптический кабель, витую пару, цифровую абонентскую линию (DSL) или беспроводные технологии, такие как инфракрасную, радио или микроволновую, то коаксиальный кабель, волоконно-оптический кабель, витая пара, DSL или беспроводные технологии, такие как инфракрасная, радио или микроволновая, включены в понятие носителя информации. Используемые здесь магнитные и немагнитные диски, включают в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой диск универсального назначения (DVD), гибкий магнитный диск и диск blue-ray, где магнитные диски обычно воспроизводят данные магнитным образом, в то время как немагнитные диски воспроизводят данные оптически с помощью лазера. Сочетания вышеописанного также должны быть включены в объем понятия машиночитаемого носителя информации.
[0078] Предшествующее описание изобретения предоставлено, чтобы позволить любому специалисту в соответствующей области реализовать или использовать изобретение. Различные модификации изобретения будут легко очевидны специалисту в соответствующей области, а определенные здесь основные принципы могут быть применены к прочим вариациям без отступления от духа и объема изобретения. Таким образом, изобретение не предназначено ограничиваться описанными здесь примерами и исполнениями, но должно соответствовать самому широкому объему, не противоречащему описанным здесь принципам и новым признакам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА БЕСПРОВОДНОЙ РАДИОСВЯЗИ И СПОСОБ ПАКЕТНОЙ ПЕРЕДАЧИ | 2010 |
|
RU2534739C2 |
| УЛУЧШЕНИЕ СЛЫШИМОСТИ ДЛЯ ОПОРНЫХ СИГНАЛОВ | 2013 |
|
RU2544003C2 |
| УЛУЧШЕНИЕ СЛЫШИМОСТИ ДЛЯ ОПОРНЫХ СИГНАЛОВ | 2010 |
|
RU2494543C2 |
| РАСШИРЕННЫЙ ПИЛОТНЫЙ СИГНАЛ | 2008 |
|
RU2468520C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ФЕМТОСОТ ПРИ ПАССИВНОМ СОДЕЙСТВИИ ИЗ МАКРОСОТОВОЙ БЕСПРОВОДНОЙ СЕТИ | 2008 |
|
RU2468535C2 |
| СТРУКТУРА ПОДАВЛЕНИЯ МЕЖСОТОВЫХ ПОМЕХ | 2009 |
|
RU2483447C2 |
| РАСШИРЕНИЯ UTRAN ДЛЯ ПОДДЕРЖКИ ПОДАВЛЕНИЯ МЕЖСОТОВЫХ ПОМЕХ | 2009 |
|
RU2468541C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЙ ПОЗИЦИОНИРОВАНИЯ В СИСТЕМАХ ПЕРЕДАЧИ С МНОЖЕСТВЕННЫМИ АНТЕННАМИ | 2011 |
|
RU2556241C2 |
| СИСТЕМА И СПОСОБ ХРАНЕНИЯ ИНФОРМАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ФЕМТО-СОТЫ | 2008 |
|
RU2467517C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЛОГИЧЕСКОГО ВЫВОДА ВОЗМОЖНОСТИ ПОДАВЛЕНИЯ ПОМЕХ ПОЛЬЗОВАТЕЛЬСКИМ ОБОРУДОВАНИЕМ ИЗ СООБЩЕНИЯ ОБ ИЗМЕРЕНИЯХ | 2011 |
|
RU2534033C2 |

Изобретение относится к системе мобильной связи раскрывает технологию обнаружения сот при помощи подавления помех в сети беспроводной связи и обеспечивает повышение эффективности за счет обнаружения большего количества сот. Изобретение раскрывает оборудование пользователя (UE), которое может обнаружить пилот-сигналы от сот в беспроводной сети, используя подавление помех. UE может обработать принятый сигнал, чтобы обнаружить пилот-сигналы от одной или более сот. Пилот-сигналы могут быть общими пилот-сигналами, передаваемыми с коэффициентом повторного использования, равным единице, или пилот-сигналами с низким повторным использованием, передаваемыми с коэффициентом повторного использования больше единицы. UE может оценить помехи от обнаруженной соты (например, наиболее сильной обнаруженной соты) и может подавить оцененные помехи в принятом сигнале. Затем UE может обработать сигнал с подавленными помехами, чтобы обнаружить пилот-сигналы от дополнительных сот. UE может иметь возможность обнаружить пилот-сигналы от большего числа сот, например, от более слабых сот, посредством подавления помех, вызванных пилот-сигналами от обнаруженных сот. Это может быть востребованным для различных приложений, таких как позиционирование. 4 н. и 18 з.п. ф-лы, 15 ил.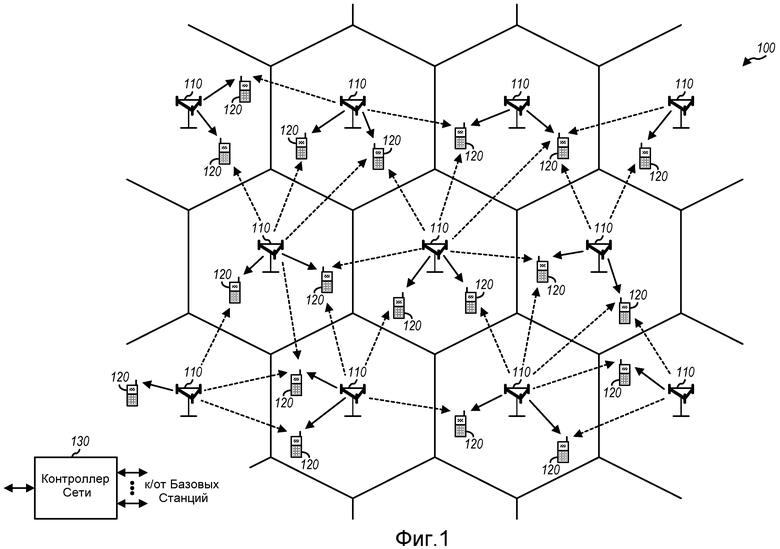
1. Способ обнаружения сот в сети беспроводной связи, содержащий этапы, на которых:
получают принятый сигнал, содержащий пилот-сигналы, переданные множеством сот в беспроводной сети; и
обрабатывают принятый сигнал при помощи подавления помех, чтобы обнаружить пилот-сигналы от множества сот, при этом подавление помех увеличивает число обнаруженных сот.
2. Способ по п.1, в котором этап обработки принятого сигнала при помощи подавления помех содержит этапы, на которых:
обрабатывают принятый сигнал, чтобы обнаружить, по меньшей мере, один пилот-сигнал от, по меньшей мере, одной соты,
идентифицируют наиболее сильную соту из, по меньшей мере, одной соты,
оценивают помехи, вызванные пилот-сигналом от наиболее сильной соты,
подавляют оцененные помехи в принятом сигнале, чтобы получить сигнал с подавленными помехами, и
обрабатывают сигнал с подавленными помехами, чтобы обнаружить, по меньшей мере, один дополнительный пилот-сигнал от, по меньшей мере, одной дополнительной соты.
3. Способ по п.1, в котором этап обработки принятого сигнала при помощи подавления помех содержит этапы, на которых:
выполняют обнаружение пилот-сигнала и подавление помех на множестве стадий, причем для каждой стадии
обнаруживают один или более пилот-сигналов от одной или более сот,
выбирают, по меньшей мере, одну соту для подавления помех из одной или более обнаруженных сот, и
подавляют помехи, вызванные, по меньшей мере, одной выбранной сотой.
4. Способ по п.3, в котором для подавления помех на каждой стадии выбирается наиболее сильная сота из одной или более обнаруженных сот.
5. Способ по п.3, в котором этап подавления помех, вызванных, по меньшей мере, одной выбранной сотой содержит применительно к каждой выбранной соте этапы, на которых:
получают оценку канала для выбранной соты после подавления помех от ранее выбранных сот;
формируют пилот-сигнал для выбранной соты, и
производят оценку помех, вызванных выбранной сотой, на основании сформированного пилот-сигнала и оценки канала для выбранной соты.
6. Способ по п.3, в котором этап обработки принятого сигнала с помощью подавления помех содержит завершение обнаружения пилот-сигнала и подавления помех, когда более невозможно обнаружить ни один пилот-сигнал.
7. Способ по п.3, в котором этап обработки принятого сигнала с помощью подавления помех содержит завершение обнаружения пилот-сигнала и подавления помех, когда обнаружены все соты из списка сот, или когда было обнаружено заранее установленное число сот, или когда наступает условие завершения.
8. Способ по п.1, дополнительно содержащий этапы, на которых:
получают измерения времени для множества обнаруженных сот на основании пилот-сигналов от обнаруженных сот и
получают оценку местоположения для оборудования пользователя (UE) на основании измерений времени для множества обнаруженных сот, при этом оценка местоположения имеет повышенную точность из-за большего числа сот, обнаруженных при помощи подавления помех.
9. Способ по п.1, дополнительно содержащий этапы, на которых:
идентифицируют множество обнаруженных сот на основании пилот-сигналов от обнаруженных сот; и
получают оценку местоположения для оборудования пользователя (UE) на основании идентификационных данных множества обнаруженных сот, при этом оценка местоположения имеет повышенную точность из-за большего числа сот, обнаруженных при помощи подавления помех.
10. Способ по п.1, в котором пилот-сигналы представляют собой общие пилот-сигналы, передаваемые множеством сот с коэффициентом повторного использования, равным единице.
11. Способ по п.1, в котором пилот-сигналы представляют собой пилот-сигналы с низким повторным использованием, передаваемые множеством сот с коэффициентом повторного использования больше единицы.
12. Способ по п.11, в котором каждая сота передает пилот-сигнал с низким повторным использованием по подмножеству временных слотов, доступных для передачи пилот-сигналов с низким повторным использованием.
13. Способ по п.11, в котором каждая сота передает пилот-сигнал с низким повторным использованием по подмножеству поднесущих, доступных для передачи пилот-сигналов с низким повторным использованием.
14. Устройство для беспроводной связи, содержащее:
средство для получения принятого сигнала, содержащего пилот-сигналы, переданные множеством сот в сети беспроводной связи; и
средство для обработки принятого сигнала при помощи подавления помех, чтобы обнаружить пилот-сигналы от множества сот, при этом подавление помех увеличивает число обнаруженных сот.
15. Устройство по п.14, в котором средство для обработки принятого сигнала при помощи подавления помех содержит
средство для обработки принятого сигнала, чтобы обнаружить, по меньшей мере, один пилот-сигнал от, по меньшей мере, одной соты,
средство для идентификации наиболее сильной соты из, по меньшей мере, одной соты,
средство для оценки помех, вызванных пилот-сигналом от наиболее сильной соты,
средство для подавления оцененных помех в принятом сигнале, чтобы получить сигнал с подавленными помехами, и
средство для обработки сигнала с подавленными помехами, чтобы обнаружить, по меньшей мере, один дополнительный пилот-сигнал от, по меньшей мере, одной дополнительной соты.
16. Устройство по п.14, в котором средство для обработки принятого сигнала при помощи подавления помех содержит
средство для выполнения обнаружения пилот-сигнала и подавления помех на множестве стадий,
средство для обнаружения одного или более пилот-сигналов от одной или более сот на каждой стадии,
средство для выбора, по меньшей мере, одной соты для подавления помех из одной или более обнаруженных сот, и
средство для подавления помех, вызванных, по меньшей мере, одной выбранной сотой.
17. Устройство по п.14, дополнительно содержащее:
средство для получения измерений времени для множества обнаруженных сот на основании пилот-сигналов от обнаруженных сот и
средство для получения оценки местоположения для оборудования пользователя (UE) на основании измерений времени для множества обнаруженных сот, при этом оценка местоположения имеет повышенную точность из-за большего числа сот, обнаруженных при помощи подавления помех.
18. Устройство для беспроводной связи, содержащее:
по меньшей мере, один процессор, выполненный с возможностью получения принятого сигнала, содержащего пилот-сигналы, переданные множеством сот в сети беспроводной связи; и обработки принятого сигнала при помощи подавления помех, чтобы обнаружить пилот-сигналы от множества сот, при этом подавление помех увеличивает число обнаруженных сот.
19. Устройство по п.18, в котором, по меньшей мере, один процессор выполнен с возможностью обработки принятого сигнала, чтобы обнаружить, по меньшей мере, один пилот-сигнал от, по меньшей мере, одной соты; идентификации наиболее сильной соты из, по меньшей мере, одной соты; оценки помех, вызванных пилот-сигналом от наиболее сильной соты; подавления оцененных помех в принятом сигнале, чтобы получить сигнал с подавленными помехами; и обработки сигнала с подавленными помехами, чтобы обнаружить, по меньшей мере, один дополнительный пилот-сигнал от, по меньшей мере, одной дополнительной соты.
20. Устройство по п.18, в котором, по меньшей мере, один процессор выполнен с возможностью выполнения обнаружения пилот-сигнала и подавления помех на множестве стадий; и, для каждой стадии,
обнаружения одного или более пилот-сигналов от одной или более сот,
выбора, по меньшей мере, одной соты для подавления помех из одной или более обнаруженных сот, и подавления помех, вызванных, по меньшей мере, одной выбранной сотой.
21. Устройство по п.18, в котором, по меньшей мере, один процессор выполнен с возможностью получения измерений времени для множества обнаруженных сот на основании пилот-сигналов от обнаруженных сот; и получения оценки местоположения для оборудования пользователя (UE) на основании измерений времени для множества обнаруженных сот, при этом оценка местоположения имеет повышенную точность из-за большего числа сот, обнаруженных при помощи подавления помех.
22. Машиночитаемый носитель информации, содержащий сохраненную на нем компьютерную программу для обнаружения сот в сети беспроводной связи, содержащую:
код, предписывающий, по меньшей мере, одному компьютеру получить принятый сигнал, содержащий пилот-сигналы, переданные множеством сот в сети беспроводной связи; и
код, предписывающий, по меньшей мере, одному компьютеру обработать принятый сигнал при помощи подавления помех, чтобы обнаружить пилот-сигналы от множества сот, при этом подавление помех увеличивает число обнаруженных сот.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| УСТРОЙСТВО И СПОСОБ ИДЕНТИФИКАЦИИ ГРАНИЦЫ СОСЕДНЕЙ ЯЧЕЙКИ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 2005 |
|
RU2280329C1 |
| PAIS A V ET AL: Indoor DS-CDMA system deployment and performance with successive interference cancellation, ELECTRONICS LETTERS, IEE STEVENAGE, GB, vol.40, №19,16, 16.09.2004, XP006022654 ISSN: 0013-5194 | |||
| HUAIYU DAI ET AL: Asymptotic spectral efficiency | |||

