ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта заявка соответствует предварительным патентным заявкам серийный номер 61/150,137, поданной 5 февраля 2009 года, номер 61/168,087, поданной 9 апреля 2009 года, и номер 61/174,333, поданной 30 апреля 2009 года, при этом приоритет испрашивается по этим более ранним заявкам. Эти предварительные патентные заявки включены здесь в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая заявка относится, в целом, к методике беспроводной связи и, в частности, к определению местоположения пользовательского оборудования, используя опорные сигналы определения местоположения.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
К операторам мобильных сетей повышаются требования по обеспечению услуг передачи речи и высокоскоростной передачи данных, и, в то же время, операторы мобильных сетей хотят поддержать больше пользователей на одну базовую станцию, чтобы уменьшить общие затраты и сделать услуги абонентам более доступными. В результате возникает необходимость в системах беспроводной связи, которые обеспечивают более высокие скорости передачи данных и большую емкость по пользовательскому оборудованию. Однако доступный спектр для услуг беспроводной связи ограничен, и предыдущие попытки увеличить трафик в пределах фиксированной полосы частот увеличивали помехи в системе и ухудшали качество сигнала.
Были реализованы различные схемы в системах связи множественного доступа с ортогональным частотным разделением каналов (OFDMA), чтобы улучшить рабочие параметры системы. Такие технологии, как технология с множеством входов и множеством выходов (MIMO), мультиплексирование с ортогональным разделением частот (OFDM) и усовершенствованные коды исправления ошибок, повышают пропускную способность, приходящуюся на линию связи, но эти технологии не решают все проблемы, которые встречаются в сети связи.
Сети беспроводной связи обычно делятся на соты, и каждая из сот дополнительно делится на секторы соты. В каждой соте предусмотрено устройство приемопередающей базовой станции, которое обеспечивает беспроводную связь с мобильными терминалами, расположенными в зоне обслуживания соты. Опорные сигналы передаются приемопередатчиками базовой станции соты в соте, где расположено пользовательское оборудование (eNodeB или обслуживающие соты), а также передаются передатчиками базовой станции в различных соседних сотах, расположенных вокруг обслуживающей соты.
Опорные сигналы используются пользовательским оборудованием в системе множественного доступа с ортогональным частотным разделением каналов (OFDMA), например системах мобильной беспроводной связи 3GPP и LTE, чтобы содействовать в установлении местоположения пользовательского оборудования в системе мобильной беспроводной связи. В одном виде анализа местоположения пользовательское оборудование использует опорные сигналы, принятые от обслуживающих и соседних сот, чтобы определить местоположение пользовательского оборудования с помощью определения разности во времени приема опорных сигналов, переданных из обслуживающей соты и соседних сот. Путем вычисления разности во времени приема опорных сигналов пользовательское оборудование или другие компоненты в сети могут выполнить вычисления по триангуляции для точного определения местоположения пользовательского оборудования в сети. Эта информация о местоположении используется для регулирования мощности сигналов передачи от пользовательского оборудования и в обратном направлении, чтобы уменьшить помехи от других сигналов в сети и улучшить общую точность передачи сигнала к пользовательскому оборудованию и от него.
"Слышимость" соседних сот определяется способностью пользовательского оборудования обнаружить или "услышать" опорные сигналы от соседних сот. При этом опорные сигналы от обслуживающих сот и соседних сот должны быть точно обнаружены, или "услышаны", пользовательским оборудованием, чтобы использовать их в анализе местоположения. Одна проблема, связанная со слышимостью соседних сот, возникает, когда пользовательское оборудование расположено близко к центру обслуживающей соты, в результате чего опорные сигналы от соседних сот слишком слабы для их надлежащего обнаружения пользовательским оборудованием. В этой ситуации опорные сигналы от соседних сот слишком слабы для пользовательского оборудования, чтобы точно оценить разность во времени приема между опорными сигналами от обслуживающей и различных соседних сот, что препятствует анализу местоположения методом триангуляции, проводимому пользовательским оборудованием.
Известные системы и предложения неудовлетворительно решают проблему слышимости соседних сот, которая возникает, когда пользовательское оборудование расположено близко к центру обслуживающей соты. Эти известные системы и предложения включают следующее: (1) 3GPP TS 36.133 v8.4.0, "Е-ULTRA. Requirements for support of radio resource management", (2) 3GPP TS 36.214 v8.5.0, "E-ULTRA; Physical layer measurements", декабрь 2008, (3) 3GPP TS 36.211 v8.5.0, "E-ULTRA: Physical channels and modulation", декабрь 2008, (4) R1-090053, "Improving the hearability of LTE Positioning Service", Alcatel-Lucent, RAN155bis, Любляна, Словения, январь 2009, [1], (5) R1-090321, "Positioning Support for LTE Release-9, RAN1 Specific Issues", Motorola, RAN155bis, Любляна, Словения, январь 2009, [2] и (6) R1-090353, 'On OTDOA in LTE', Qualcomm Европа, RAN1-55bis, Любляна, Словения, январь 2009 г. [3].
В приведенных выше ссылках (4) и (6) предлагаются различные дополнительные структуры опорного сигнала, но оба этих предложения не обеспечивают осуществимого или улучшенного решения проблемы слышимости соседних сот, когда пользовательское оборудование располагается вблизи обслуживающей соты.
В ссылке (4) должен быть запланирован один ресурсный блок (RB) для передачи нового шаблона опорного сигнала (RS), называемого LCS-RS. Однако совместное планирование ресурсного блока RB для передачи опорного сигнала (LCS-RS) требует координации между различными соседними сотами, которая в настоящий момент не поддерживается сетевыми системами связи. Кроме того, упомянутая выше ссылка (4) требует, чтобы соты были синхронизированы, причем новый шаблон опорного сигнала LCS-RS имеет структуру, которая отличается от зависящего от соты опорного сигнала RS, называемого CRS, который определяется в данном описании изобретения. Наконец, коллизии между кластерами соседних сот могут все еще возникать, если не делается экстенсивной координации по большему кластеру сети. Чтобы реализовать предложение, упомянутое в ссылке (4), требуется новый тип опорного сигнала, который не распознается текущими сетевыми системами, и должна быть обеспечена крупномасштабная синхронная координация компонентов системы. Следовательно, это предложение требует модификации существующей системы, которая является слишком трудоемкой, чтобы быть практически осуществимой.
Относительно вышеупомянутого предложения (6) отметим, что предложенный опорный сигнал (E-IRDL RS) отвечает совсем другой структуре по сравнению со структурой зависящего от соты опорного сигнала (CRS) в существующем стандарте, что требует введения новой и сложной технологии в приемники. Чтобы реализовать предложение по ссылке (6), требуется новый тип опорного сигнала, который не распознается существующими сетевыми системами, и потребовалась бы реализация новой технологии в приемниках. Следовательно, это предложение также потребует изменений в существующей системе, которые слишком велики, чтобы быть осуществимыми или практичными.
По ссылкам (4), (5) и (6) также осуществлялось моделирование по сценарию развертывания множества многосекторных сот, при этом пользовательское оборудование моделируется как расположенное однородно произвольно в обслуживающей соте. Результаты моделирования 3GPP для случаев 1 и 3 показаны ниже с требованием по чувствительности FDD внутричастотных измерений, установленным как SGH_RP ~126 дВм, как определено в 3GPP TS 36.133 v8.4.0, "Requirements for support of radio resource management".
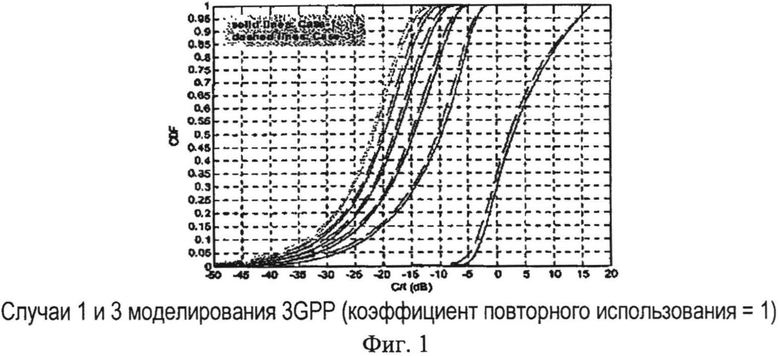
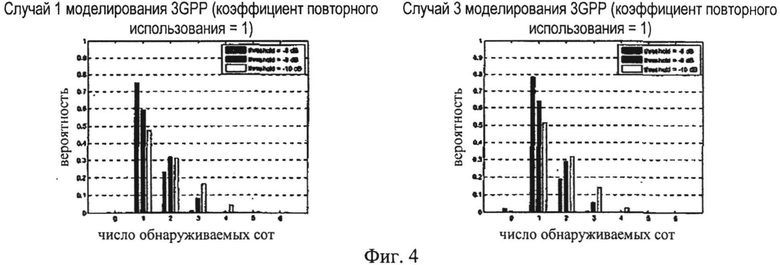
При моделировании могли быть достигнуты механизмы повторного использования по частотной, временной и/или кодовой области, но не предполагалось никакого конкретного механизма повторного использования. Однако моделирование предполагало использование коэффициентов повторного использования 1, 3 и 6. Распределения C/I наилучших сигналов N соседних сот, как они наблюдаются в каждом пользовательском оборудовании (UE), были получены и графически изображены, как показано на Фиг.1-3. Геометрия распределения C/I сигнала от обслуживающей соты также изображена на графике для сравнения. Требование слышимости соты, определенное в 3GPP TS 36.133 v8.4.0, "Requirements for support of radio resource management", выражены как SCH E=~-6 дБ. В настоящем исследовании моделирования требования по слышимости C/I предполагаются как -6, -8 или -10 дБ. Распределение числа соседних сот с обнаруживаемым сигналом графически показано на Фиг.4-6. Из полученных данных моделирования заявители выявили следующее:
- Для коэффициента повторного использования 1, вероятность того, что UE может обнаружить 3 или более сот, составляет менее 20%, даже когда ISO=50 Ом (случай 1) порог слышимости C/I не выше -10 дБ;
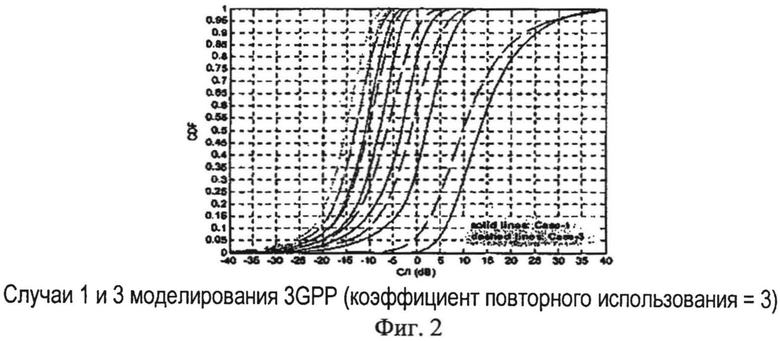
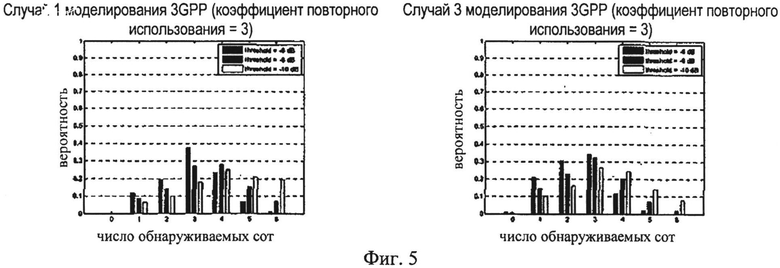
- Для коэффициента повторного использования 3:
- в Случае 1 UE может обнаружить 3 или более сот с вероятностью приблизительно 69%, когда порог C/I составляет -6 дБ, 77% при -8 дБ и 85% при -10 дБ;
- в Случае 3 UE может обнаружить 3 или более сот с вероятностью приблизительно 48%, когда порог C/I составляет -6 дБ, 62% при -8 дБ и 73% при -10 дБ;
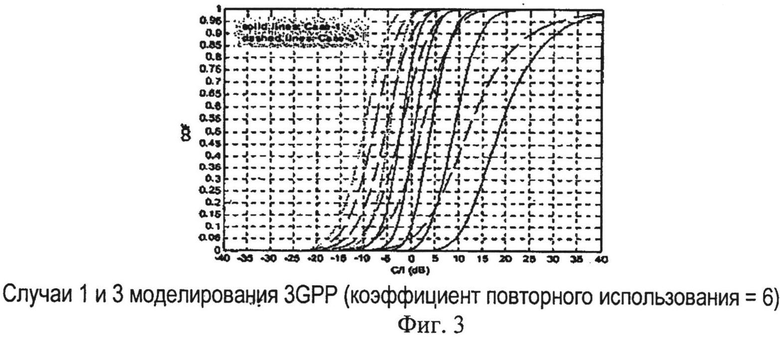
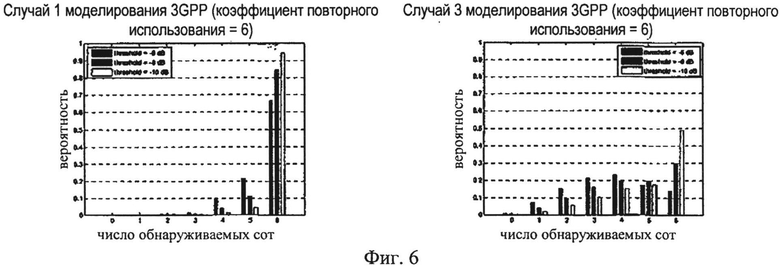
- Для коэффициента повторного использования 6:
- В Случае 1 UE может обнаружить 3 или более сот с вероятностью приблизительно 98%, когда порог C/I составляет -6 дБ; и
- В Случае 3 UE может обнаружить 3 или более сот с вероятностью приблизительно 77%, когда порог C/I составляет -6 дБ, 86% при -8 дБ и 92% при -10 дБ.
Улучшение точности вычисления разности во времени приема опорного сигнала обслуживающей соты и соседних сот приведет к улучшению точности определения местоположения, что, в свою очередь, приведет к улучшению рабочих параметров системы и к сокращению потери сигналов данных и управляющих сигналов, поступающих к пользовательскому оборудованию и от пользовательского оборудования. Требуется повышение точности вычисления по триангуляции, не требуя больших изменений системы и не требуя полных изменений полосы частот опорных сигналов или опорных сигналов. Другими словами, улучшение точности анализа местоположения пользовательского оборудования, когда пользовательское оборудование расположено вблизи обслуживающей соты, необходимо, если система должна работать в пределах ограничений развернутых на текущий момент систем 3GPP и LTE, и не требуя модификации системы или развертывания нового аппаратного обеспечения. На основе анализа методом моделирования и сравнения существующих систем и предложений возникает потребность улучшить опорные сигналы, используемые для определения местоположения, чтобы достичь более точного определения местоположения пользовательского оборудования.
Различные компоненты системы можно называть по-разному в зависимости от спецификации, используемой в любой конкретной сетевой конфигурации или системе связи. Например, "пользовательское оборудование" охватывает персональные компьютеры в кабельной сети, а также другие типы оборудования, связанного беспроводной связью непосредственно с сотовой сетью, как может быть найдено из опыта производителей различных моделей мобильных терминалов ("сотовых телефонов"), имеющих различные признаки и функциональность, включая доступ к Интернету, электронную почту, службу обмена сообщениями и т.д.
Кроме того, слова "приемник" и "передатчик" могут упоминаться как "точка доступа" (АР), "базовая станция" и "пользователь", в зависимости от направления, в котором осуществляется передача и прием. Например, точка доступа (АР) или базовая станция (eNodeB или eNB) является передатчиком, а пользователь является приемником для нисходящей линии связи, тогда как точка доступа (АР) или базовая станция (eNodeB или eNB) является приемником, а пользователь является передатчиком для восходящей линии связи. Эти термины (такие как "передатчик" или "приемник") не следует толковать ограничительно, поскольку они могут включать различные узлы мобильной связи или передающие устройства, расположенные в сети.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Слышимость соседних сот может быть улучшена включением дополнительного опорного сигнала, который может быть обнаружен при низкой чувствительности и низком отношении сигнал-шум, путем введения неоднократного повторного использования частоты для сигналов, используемых для измерения разности во времени приема (TDOA), например ортогональности сигналов, передаваемых из обслуживающих сот и различных соседних сот. Предлагается новый опорный сигнал, названный TDOA-RS, для улучшения слышимости соседних сот в сотовой сети, в которой используется система 3GPP EUTRAN (LTE), и сигнал TDOA-RS может быть передан в любых ресурсных блоках (RB) для подкадра физического совместно используемого канала нисходящей линии связи (PDSCH) и/или одночастотной сети групповой/широковещательной передачи (MBSFN) независимо от того, передается ли последний из этих двух на несущей, поддерживающей РМСН и PDSCH, или нет.
Помимо дополнительного опорного сигнала TDOA-RS также может использоваться дополнительный сигнал синхронизации (TDOA-sync) для улучшения слышимости соседних сот. Этот модифицированный или новый сигнал TDOA-sync может быть передан в символах OFDM, совместно использующих те же самые ресурсные блоки RB, что и канал синхронизации. Чтобы увеличить ортогональность, различные соты могут использовать различные символы OFDM, чтобы передать этот сигнал TDOA-sync.
Сигналы синхронизации также могут быть расширены (TDOA-sync), чтобы поддерживать ортогональность между сотами, со свойством ортогональности или низкой корреляции по первичным и вторичным сигналам синхронизации, как определено в стандартах Release-8, 3GPP TS 36.211v8.5.0. Ресурсные блоки (RB), несущие эти дополнительные сигналы, могут быть переданы посредством скачкообразной перестройки по различным частотным ресурсам между последующими выполнениями передачи. Альтернативно, в отношении них также может выполняться скачкообразная перестройка в пределах ресурсных блоков, используемых для сигналов синхронизации, то есть когда они передаются в тех же самых ресурсных блоках, что и канал синхронизации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже будут описаны, исключительно в качестве примера, варианты воплощения настоящего изобретения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 - распределение C/I для 6 лучших сот, обнаруженных равномерно разбросанными UE (коэффициент повторного использования = 1);
Фиг.2 - распределение C/I для 6 лучших сот, обнаруженных равномерно разбросанными UE (коэффициент повторного использования = 3);
Фиг.3 - распределение C/I для 6 лучших сот, обнаруженных равномерно разбросанными UE (коэффициент повторного использования = 6);
Фиг.4 - распределение числа обнаруживаемых сот (коэффициент повторного использования = 1);
Фиг.5 - распределение числа обнаруживаемых сот (коэффициент повторного использования = 3);
Фиг.6 - распределение числа обнаруживаемых сот (коэффициент повторного использования = 6);
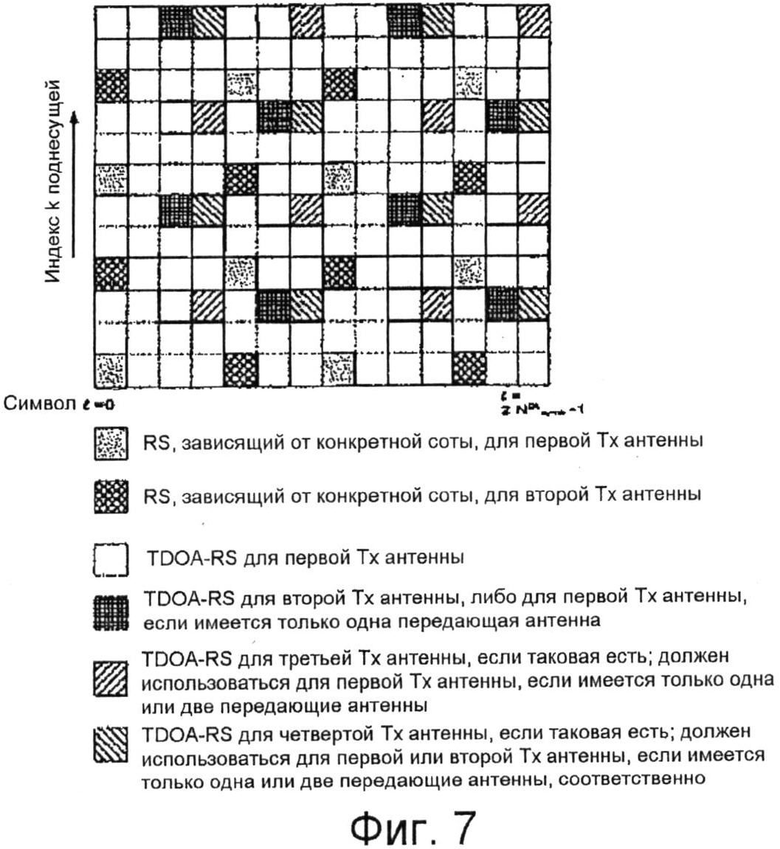
Фиг.7 - предлагаемая структура TDOA-RS;
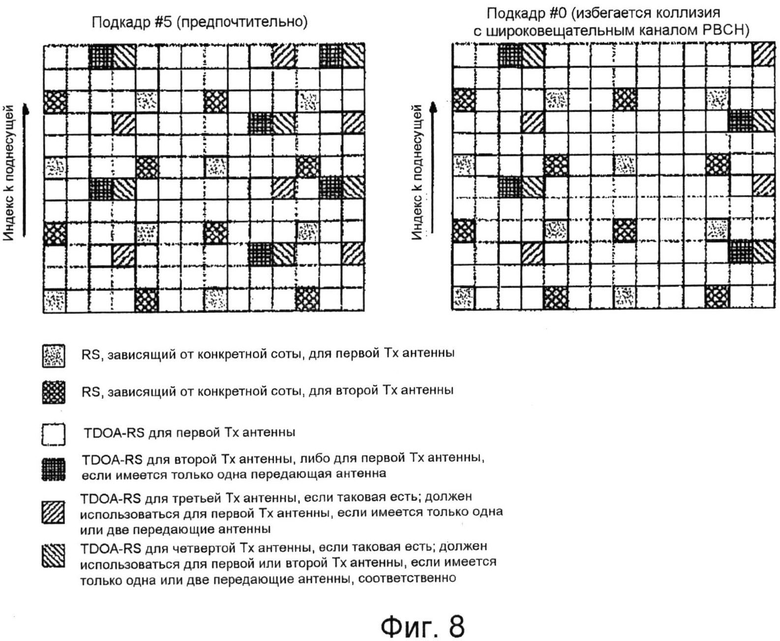
Фиг.8 - шаблон TDOA-RS для передачи в тех же самых ресурсных блоках, что и канал синхронизации;
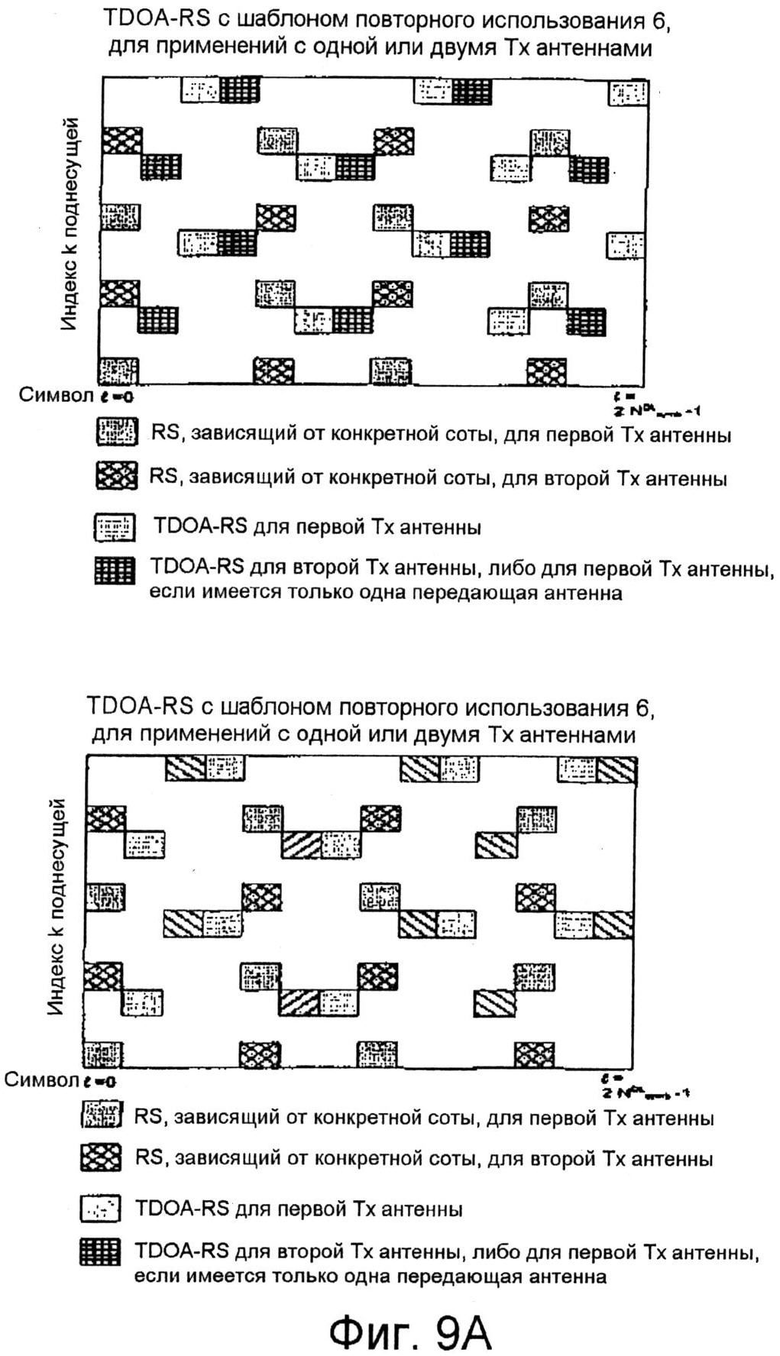
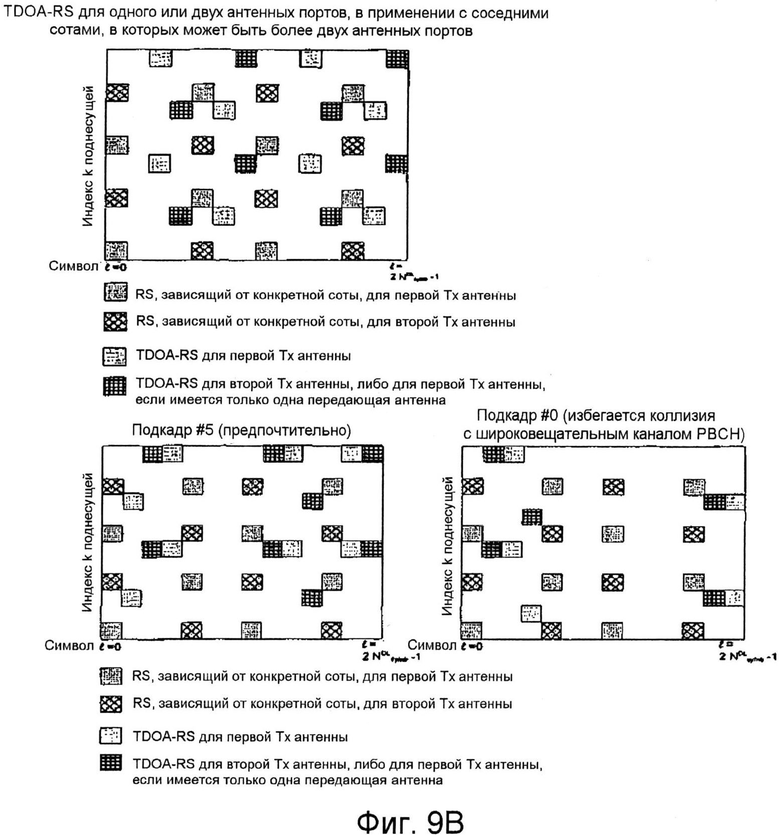
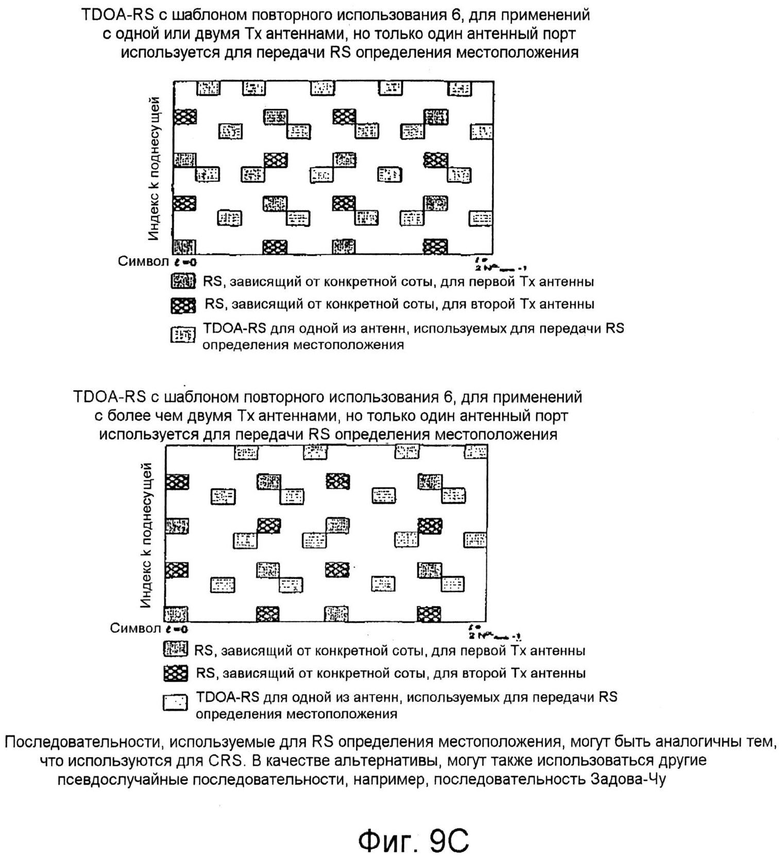
Фиг.9A-9G - схемы назначений блоков в сигнале передачи;
Фиг.10 - схема системы связи;
Фиг.11 - схема базовой станции;
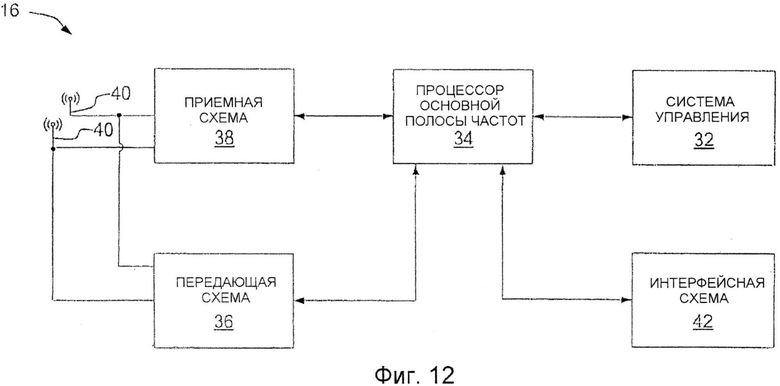
Фиг.12 - схема мобильного терминала.
Одинаковые ссылочные номера используются на разных чертежах для обозначения аналогичных элементов.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
На Фиг.10 блок-схема иллюстрирует контроллер базовых станций (BSC) 10, который управляет беспроводной связью в пределах множества сот 12, которые обслуживаются соответствующими базовыми станциями (BS) 14. В некоторых конфигурациях каждая сота дополнительно делится на множество секторов 13 или зон. В целом, каждая базовая станция 14 обеспечивает связь при использовании OFDM с мобильными и/или беспроводными терминалами 16, которые находятся в пределах соты 12, ассоциированной с соответствующей базовой станцией 14. Перемещение мобильных терминалов 16 относительно базовых станций 14 приводит к значительным колебаниям в состоянии каналов.
Как показано на чертежах, базовые станции 14 и мобильные терминалы 16 могут включать в себя множественные антенны, чтобы обеспечить пространственное разнесение для осуществления связи. В некоторых конфигурациях для связи между базовыми станциями 14 и беспроводными терминалами 16 могут использоваться ретрансляционные станции 15. Может быть осуществлена эстафетная передача обслуживания беспроводных терминалов 16 из любой соты 12, зоны сектора 13, базовой станции 14 или ретрансляционной станции 15 в другую соту 12, зону сектора 13, базовую станцию 14 или ретрансляционную станцию 15. В некоторых конфигурациях базовые станции 14 связываются друг с другом и с другой сетью (такой как базовая сеть или Интернет) через магистральную сеть 11.
Проблема слышимости, решаемая настоящим изобретением, возникает, когда мобильный терминал MS 16 находится в непосредственной близости от приемопередатчика базовой станции BS 14. Без использования настоящего изобретения мобильный терминал MS 16 столкнулся бы с проблемой анализа триангуляции, которая приведет к проблемам обеспечения точности определения местоположения или данных местоположения в системе. Изобретение решает эту проблему слышимости путем использования опорного сигнала (TDOA-RS) и дополнительного опорного сигнала синхронизации (TDOA-sync). Слышимость соседних сот может быть улучшена путем включения дополнительного опорного сигнала, который может быть обнаружен при низкой чувствительности и низком отношении сигнал-шум, посредством введения неоднократного повторного использования частоты для сигналов, используемых для измерения разности во времени приема (TDOA), например ортогональности сигналов, переданных из обслуживающих сот и различных соседних сот. Предлагается новый опорный сигнал, называемый TDOA-RS, чтобы улучшить слышимость соседних сот в сотовой сети, в которой развернута система 3GPP EUTRAN (LTE), и сигнал TDOA-RS может быть передан в любых ресурсных блоках (RB) для подкадра PDSCH и/или MBSFN независимо от того, передается ли последний из указанных двух на несущей, поддерживающей РМСН и PDSCH, или нет.
Также может быть включен дополнительный сигнал синхронизации (TDOA-sync), чтобы улучшить слышимость соседних сот. Этот сигнал TDOA-sync может быть передан в символах OFDM, совместно использующих те же самые ресурсные блоки RB, что канал синхронизации. Для увеличения ортогональности различные базовые станции для передачи сигнала TDOA-sync могут использовать различные символы OFDM. Сигналы синхронизации также могут быть расширены (TDOA-sync), чтобы поддерживать ортогональность между сотами, со свойством ортогональности или низкой корреляции по первичному и вторичному сигналам синхронизации, как определено в стандартах Release-8, 3GPP TS 36.211v8.5.0. Ресурсные блоки (RB), несущие эти дополнительные сигналы, могут быть переданы посредством скачкообразной перестройки по различным частотам между последующими выполнениями передачи. Альтернативно, в отношении них также может выполняться скачкообразная перестройка в пределах ресурсных блоков, используемых для сигналов синхронизации, т.е. когда они передаются через те же самые ресурсные блоки RB, что и канал синхронизации.
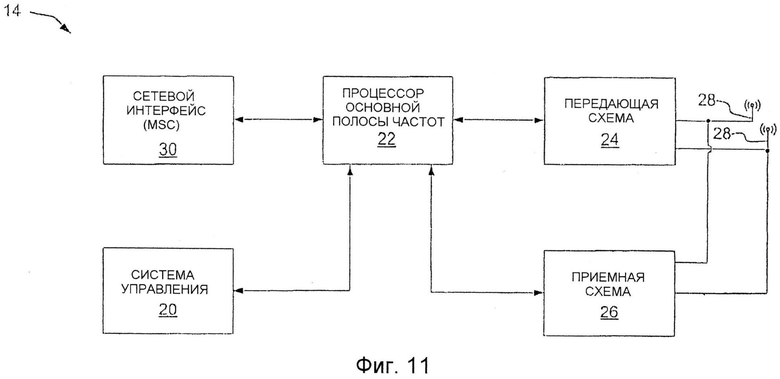
На Фиг.11 представлен пример базовой станции 14. Базовая станция 14, в общем, включает в себя систему управления 20, процессор 22 основной полосы частот, передающую схему 24, приемную схему 26, множественные антенны 28 и сетевой интерфейс 30. Приемник 26 принимает радиочастотные сигналы, несущие информацию от одного или нескольких удаленных передатчиков, предусмотренных в мобильных терминалах 16 (показаны на Фиг.3) и ретрансляционных станциях 15 (показаны на Фиг.4). В дополнение к компонентам, показанным на Фиг.11, малошумящий усилитель и фильтр могут совместно работать для усиления и удаления широкополосной помехи из обрабатываемого сигнала. Кроме того, схема понижающего преобразования и оцифровки затем преобразует принятый отфильтрованный сигнал в сигнал промежуточной или основной полосы частот, который затем оцифровывается в один или несколько цифровых потоков.
Процессор 22 основной полосы частот обрабатывает принятый оцифрованный сигнал, чтобы извлечь биты информации или данных, переданные в принятом сигнале. Эта обработка обычно включает в себя операции демодуляции, декодирования и коррекции ошибок. Как таковой, процессор 22 основной полосы частот, в общем, реализуется в одном или нескольких процессорах цифровой обработки сигналов (DSP) или в специализированных интегральных микросхемах (ASIC). Принятая информация затем отправляется через беспроводную сеть в сетевой интерфейс 30 или передается другим мобильным терминалам 16, обслуживаемым базовой станцией 14, либо непосредственно, либо с помощью ретранслятора 15.
На стороне передачи процессор 22 основной полосы частот принимает оцифрованные данные, которые могут представлять речь, данные или управляющую информацию, от сетевого интерфейса 30 под управлением системы 20 управления и кодирует данные для передачи. Кодированные данные передаются в передающую схему 24, где они модулируются одним или несколькими сигналами несущей, имеющими требуемую частоту или частоты передачи. Усилитель мощности может также использоваться для усиления модулированных сигналов несущей до уровня, подходящего для передачи, и подает модулированные сигналы несущей на антенны 28 через схему согласования (не показана). Модуляция и обработка описываются ниже более подробно.
На Фиг.12 иллюстрируется пользовательское оборудование или мобильный терминал. Как и базовая станция 14, мобильный терминал 16 включает в себя систему 32 управления, процессор 34 основной полосы частот, передающую схему 36, приемную схему 38, множественные антенны 40 и схему 42 пользовательского интерфейса. Приемник 38 принимает радиочастотные сигналы, переносящие информацию от одной или нескольких базовых станций 14 и ретрансляторов 15. Малошумящий усилитель и фильтр (не показаны) могут совместно работать для усиления и удаления широкополосной помехи из обрабатываемого сигнала. Затем схема понижающего преобразования и оцифровки (не показана) преобразует принятый отфильтрованный сигнал в сигнал промежуточной или основной полосы частот, который затем оцифровывается в один или нескольких цифровых потоков.
Процессор 34 основной полосы частот обрабатывает принятый оцифрованный сигнал, чтобы извлечь биты информации или данных, переданные в принятом сигнале. Эта обработка обычно включает в себя операции демодуляции, декодирования и исправления ошибок. Процессор 34 основной полосы частот, в общем, реализуется в одном или нескольких процессорах обработки цифровых сигналов (DSP) и специализированных интегральных микросхемах (ASIC).
Для передачи процессор 34 основной полосы частот принимает оцифрованные данные, которые могут представлять речь, видео, данные или управляющую информацию, из системы 32 управления, которая кодирует их для передачи. Кодированные данные выдаются в передающую схему 36, где они используются модулятором для модуляции одного или нескольких сигналов на требуемой для передачи частоте или частотах. Может также использоваться усилитель мощности для усиления модулированных сигналов несущей до уровня, подходящего для передачи, и подачи модулированного сигнала несущей на антенны 40 через схему согласования.
Используются различные способы модуляции и обработки, известные специалистам в данной области техники, для передачи сигналов между мобильным терминалом и базовой станцией, либо непосредственно, либо через ретрансляционную станцию. В модуляции OFDM полоса частот передачи делится на множество ортогональных несущих. Каждая несущая модулируется в соответствии с передаваемыми цифровыми данными. Поскольку OFDM делит полосу частот передачи на множество несущих, ширина полосы, приходящаяся на каждую несущую, уменьшается, и время модуляции, приходящееся на каждую несущую, увеличивается. Поскольку множество несущих передаются параллельно, скорость передачи цифровых данных или символов на любой заданной несущей ниже, чем когда используется единственная несущая.
Опорные сигналы используются пользовательским оборудованием, таким как мобильный терминал MS 16, в системе множественного доступа с ортогональным частотным разделением каналов (OFDMA), такой как системы мобильной беспроводной связи 3GPP и LTE, чтобы помочь в установлении местоположения пользовательского оборудования в системе мобильной беспроводной связи. Как показано на Фиг.10 и при использовании одного вида анализа местоположения, пользовательское оборудование MS 16А использует опорные сигналы, принимаемые от BS 14А обслуживающей соты и BS 14B и/или 14С соседних сот, чтобы определить местоположение пользовательского оборудования на основе анализа разности во времени приема с использованием опорных сигналов разности во времени, передаваемых из BS 14А обслуживающей соты и BS 14B и/или 14С соседних сот.
Путем вычисления разности во времени приема для опорных сигналов пользовательское оборудование MS 16А или другие компоненты в сети могут выполнить вычисление по триангуляции, чтобы точно определить местоположение пользовательского оборудования MS 16А в сети. Эта информация о местоположении используется для регулирования мощности сигналов передачи к и от пользовательского оборудования MS 16А, чтобы уменьшить помехи от других сигналов в сети и улучшить общую точность передач сигналов к пользовательскому оборудованию и от него.
Слышимость соседних сот является способностью пользовательского оборудования обнаружить или "услышать" опорные сигналы от BS 14B или 14С соседних сот. Однако опорные сигналы от BS 14A обслуживающей соты и BS 14B или 14С соседних сот должны быть точно обнаружены, или "услышаны", пользовательским оборудованием MS 16А, чтобы они могли использоваться для анализа местоположения. Одна проблема, с которой встречаются при "слышимости" соседних сот, возникает, когда пользовательское оборудование MS 16А расположено близко к центру обслуживающей соты с BS 14А, так что опорные сигналы от BS 14B или 14С соседних сот слишком слабы для их надлежащего обнаружения пользовательским оборудованием. В этой ситуации опорные сигналы от BS 14B и 14С соседних сот слишком слабы для пользовательского оборудования, чтобы точно оценить разность во времени приема между опорным сигналом от BS 14А обслуживающей соты и различными опорными сигналами от BS 14B и/или 14С соседних сот, что препятствует анализу местоположения триангуляцией, проводимому пользовательским оборудованием MS 16А.
Слышимость соседних сот может быть улучшена включением дополнительного опорного сигнала, который может быть обнаружен пользовательским оборудованием MS 16А при низкой чувствительности и низком отношении сигнал-шум, путем введения неоднократного повторного использования частот для сигналов, используемых для измерения разности во времени приема (TDOA), например ортогональности сигналов, переданных из обслуживающих сот и различных соседних сот. Предлагается новый опорный сигнал, называемый сигналом TDOA-RS, для улучшения слышимости BS 14B и 14С соседних сот в сотовой сети, в которой развернута система 3GPP EUTRAN (LTE), и сигнал TDOA-RS может быть передан в любых ресурсных блоках (RB) для подкадра PDSCH и/или MBSFN независимо от того, переносится ли последний из этих двух на несущей, поддерживающей РМСН и PDSCH, или нет.
Помимо дополнительного опорного сигнала TDOA-RS, также может быть включен дополнительный сигнал синхронизации (TDOA-sync), чтобы улучшить слышимость передач от BS 14B и 14С соседних сот. Первичные или вторичные сигналы синхронизации могут быть скрыты и скремблированы зависящим от соты ортогональным кодом, таким как код Уолша или другие коды с низким свойством кросс-корреляции. Если используется код Уолша, кодовые слова, полностью состоящие из 1, резервируются в нормальном первичном или вторичном сигнале. Скремблирование выполняется на последовательности синхронизации до отображения на ресурсные элементы для обработки 10FT. Могут также использоваться другие последовательности со свойством ортогональности или низкой кросс-корреляции с первичными или вторичными сигналами синхронизации.
Этот новый сигнал TDOA-sync может быть передан в символах OFDM, совместно использующих те же самые RB, что и канал синхронизации. Чтобы увеличить ортогональность, разные соты могут использовать разные символы OFDM для передачи этого сигнала TDOA-sync. Например, в зависимости от соты 10, сигнал TDOA-sync может быть передан в символе OFDM е=2, 3, 9, 10, 12 или 13 соответственно, в случае нормального CP, структуры кадра 1. Символы OFDM е=0, 1, 4, 7 и 11 резервируются для зависящего от соты опорного сигнала RS, тогда как е=5, 6 резервируются в подкадре 5 для вторичных и первичных сигналов синхронизации соответственно. Для слота 1 в подкадре 0, сигнал TDOA-sync не может быть отправлен в символе OFDM е=0, 1…3, чтобы избежать коллизии с широковещательным каналом РВСН, если он передается в том же самом ресурсном блоке RB.
Сигналы синхронизации также могут быть расширены (TDOA-sync) для поддержания ортогональности между сотами, со свойством ортогональности или низкой корреляции по первичным и вторичным сигналам синхронизации. Ресурсные блоки (RB), несущие эти дополнительные сигналы, могут быть переданы посредством скачкообразной перестройки по различным частотным ресурсам между последующими выполнениями передачи. Альтернативно, в отношении сигналов TDOA-sync также может выполняться скачкообразная перестройка в пределах ресурсных блоков, используемых для сигналов синхронизации, то есть когда они передаются в тех же самых ресурсных блоках RB, что и канал синхронизации.
Для подкадра #0 сигналы TDOA-sync должны быть переданы в символах OFDM, которые не используются для передач широковещательного канала PBCR. Группа из 6 ресурсных блоков RB, несущих первичные и вторичные сигналы синхронизации и сигналы TDOA-sync, также может скачкообразно перестраиваться на другие частотные позиции, удаленные от центра несущей, в интервале между слотами/подкадрами, определенными в текущей спецификации Ts 36.211 v8.5.0. Это также помогло бы улучшить характеристики синхронизации для пользователей, которые могут столкнуться с замиранием в центре полосы.
Сигналы TDOA-RS и TDOA-sync также могут быть переданы в подкадрах MBSFN на несущих с поддержкой или без поддержки PDSCR. С другой стороны, они могут быть совместно запланированы соседними сотами для передач в одном и том же ресурсном блоке RB, как описано в других предложениях. Периодичность подкадров, несущих сигналы TDOA-RS и/или TDOA-sync, является конфигурируемой в зависимости от необходимой точности оценки TDOA и распределения местоположения пользователей (UE или MS 16) в соте. Точно так же является конфигурируемой и количество ресурсных блоков RB, переносящих TDOA-RS в одном подкадре.
Аналогично нисходящей передаче в период бездействия (IPDL) в UTRAN группы ресурсных блоков RB в конкретном подкадре могут быть зарезервированы для исключительных передач различными BS 14B или BS 14С соседних сот (за исключением сигнала CRS) или в области данных подкадров MBSFN. Преимущество EUTRAN (LTE), основанной на OFDMA, состоит в том, что передачи от множественных BS 14B и BS 14С соседних сот в этих зарезервированных ресурсных блоках RB могут быть осуществлены одновременно, в виде дробного повторного использования частот (т.е. с переменным коэффициентом повторного использования частот, разный коэффициент для разных участков кадра) (FFR) в пределах подкадра или группы подкадров для измерения TDOA. Эти передачи могут быть с усиленной мощностью, с дополнительными опорными сигналами или без них. Схема дробного повторного использования частоты может быть использована для дополнительного улучшения слышимости. Например, может быть зарезервирована специальная зона для передачи дополнительной последовательности, зависящей от соты, где различные коэффициенты повторного использования частот могут быть сконфигурированы среди соседних сот.
Мы можем применить аналогичную конструкцию к ретрансляционным станциям, чтобы позволить им отслеживать их соседние ретрансляционные станции, потому что ретрансляционная станция не может слышать (обнаруживать SCH от соседних ретрансляционных станций) во время разговора. Кроме того, временные разности между различными базовыми станциями (eNB) в асинхронной сети могут быть выявлены через запрос и ответ на основе сигнализации Х2. Относительная временная разность между различными базовыми станциями может использоваться сетевым объектом для определения местоположения, например, LMU.
Для поддержания согласованности с зависящим от соты опорным сигналом RS (CRS), как определено в текущем стандарте Release-8, на Фиг.7 показана альтернативная структура дополнительного опорного сигнала TDOA (TDOA-RS) для определения местоположения UE для случая нормального СР. Преимущество подобия в структуре этих TDOA-RS по сравнению с CRS заключается в том, что для обнаружения TDOA-RS может использоваться аналогичный приемник. Подобно зависящему от соты опорному сигналу RS, эти сигналы TDOA-RS также зависят от конкретной соты, с величиной сдвига, зависящей от соты 10. Основное отличие от стандартных сигналов CRS состоит в том, что TDOA-RS, сконфигурированный для антенных портов 1, 2 или 3, может использоваться антенным портом 0, когда имеется только один антенный порт. Аналогичным образом, когда имеются только два антенных порта, TDOA-RS для антенных портов 2 и 3 может использоваться для антенных портов 0 и 1 соответственно. TDOA-RS, которые передаются из разных антенных портов, могут быть объединены, чтобы увеличить точность оценки TDOA.
Сигнал TDOA-RS может быть передан в любых ресурсных блоках (RB) для подкадров PDSCH и/или MBSFN независимо от того, передается ли последний из указанных двух на несущей, поддерживающей и РМСН и PDSCH, или нет. Хотя ситуация подобна сигналам TDOA-sync, имеется дополнительное ограничение, состоящее в том, что сигнал TDOA-sync должен быть передан в 6 последовательных RB в подкадре. Сигнал TDOA-sync может совместно использовать те же самые RB, что первичные и вторичные сигналы синхронизации. Альтернативно, TBOA-RS также может передаваться в RB, которые используются для каналов синхронизации, с некоторыми изменениями, как показано на Фиг.8.
Чтобы использовать выигрыш от частотного разнесения и гарантировать, что максимальное число UE в соте могут обнаружить сигналы TDOA-RS и TDOA-sync, в отношении ресурсных блоков, которые переносят эти сигналы, допускается осуществление скачкообразной перестройки частоты между выполнениями передачи сигналов. Может быть максимизирован выигрыш от частотного разнесения посредством скачкообразной перестройки по всей полосе частот, согласно заранее определенной последовательности скачкообразной перестройки частоты, зависящей от конкретной соты. В случае TDOA-RS, в отношении одного или нескольких смежных RB, переносящих TDOA-RS, может осуществляться скачкообразная перестройка на другие частотные ресурсы между последовательными выполнениями передачи.
В случае TDOA-sync группа из 6 смежных RB, несущих TDOA-sync, может скачкообразно перестраиваться на другие частотные ресурсы, например на другую группу из 6 смежных RB, между последовательными выполнениями передачи. В случае TDOA-RS, который совместно использует тот же самый RB, что и канал синхронизации, некоторый выигрыш от частотного разнесения также может быть получен посредством скачкообразной перестройки по тем 6 RB, которые переносят канал синхронизации.
В зависимости от чувствительности сигнала, требования точности оценки TDOA и распределения местоположений UE в соте, периодичность передачи сигналов TDOA-RS и TDOA-sync может быть сконфигурирована так, чтобы передавать в каждом подкадре для сигнала с более высокой плотностью или в том же подкадре, что и сигнал синхронизации. Каждый из них или оба используют подкадр 0 и 5 в каждом радиокадре.
В крайнем случае там, где коэффициент повторного использования является относительно высоким, весь ресурсный блок RB может использоваться одной сотой. Затем дополнительные опорные сигналы могут занять весь блок RB, за исключением ресурсных элементов, используемых для CRS, чтобы поддерживать обратную совместимость со стандартом Release-В. Коэффициент повторного использования может быть сконфигурирован сетью и широковещательно передан посредством нового сообщения SIB. Если сконфигурировано FFR, область передачи для каждой соты может быть определена на основе идентификатора (ID) соты. Скачкообразное перестройка частоты может также быть применена поверх FFR, путем включения заранее определенного шаблона скачкообразной перестройки, зависящего от конкретной соты, в сообщение конфигурации.
В UTRAN, LMU отвечает за оценку относительного смещения тайминга между соседними сотами путем наблюдения за их передачами. Чтобы избежать проблемы со слышимостью для E-UTRAN в LMU, альтернативный путь для LMU выяснить об относительном смещении тайминга между соседними сотами в асинхронной системе заключается в том, чтобы назначенный eNB послал в соседние базовые станции запрос на информацию об их тайминге. Если соседние eNB оборудованы спутниковым приемником для сигналов GPS или GNSS, то соседний eNB может ответить абсолютным таймингом границы кадра, например. В противном случае соседний eNB может ответить информацией об относительном тайминге, например отметкой времени, когда запрос от eNB был принят, и смещением тайминга соответствующего подкадра и SFN в соседнем eNB. Эти запрос и ответ могут быть переданы посредством сигналов Х2. Периодичность этого запроса будет зависеть от ожидаемого дрейфа опорного тактового импульса на eNB.
Чтобы оценить рабочие характеристики способа определения местоположения, такого как TDOA, должны были бы быть получены факторы, которые влияют на точность. Оценочные модели должны помочь получить точность оценки TDOA посредством UE, в зависимости от соответствующего местоположения в соте, например ошибка при выполнении оценки TDOA как функции SINR должна быть графически изображена и зафиксирована в моделировании системного уровня. Системное моделирование используется для оценки полученных характеристик по оценке местоположения UE на основе триангуляции, используя оценки TDOA сигналов, переданных от различных соседних eNB.
Настоящее изобретение решает проблемы со слышимостью путем использования нового опорного сигнала (TDOA-RS) и нового сигнала синхронизации (TDOA-sync), передаваемых в структуре сигнала, которая уже используется в стандарте EUTRAN 3GPP Release-8 (Версия 8), т.е. RS, зависящий от конкретной соты, и сигнал синхронизации. Путем использования новых сигналов в существующей структуре сигнала настоящее изобретение может быть реализовано, не усложняя приемник при поддержке оценки TDOA. Кроме того, скачкообразная перестройка ресурсных блоков, которые переносят предложенные TDOA-RS и TDOA-sync, по частотной области может задействовать частотное разнесение и максимизировать слышимость при различных состояниях канала, воспринимаемых различными UE.
Настоящее изобретение может использоваться, чтобы позволить ретрансляционной станции поддерживать выполнение текущего измерения зависящей от соты последовательности, переданной от ее соседних ретрансляционных станций. Такое измерение может помочь в планировании базовой станции и не может основываться на исходном опорном сигнале (CRS), как это определено в Release-8, потому что ретрансляционная станция также должна передавать CRS, особенно для синхронной сети. Этот механизм полезен для самоорганизованной ретрансляционной сети, где ретрансляционная станция может быть динамически добавлена/удалена, или ретрансляционная станция является подвижной.
Чтобы поддерживать определение местоположения UE путем измерения разности во времени приема (TDOA), дополнительная возможность измерения UE должна быть определена следующим образом.
5.1.12 Смещение тайминга
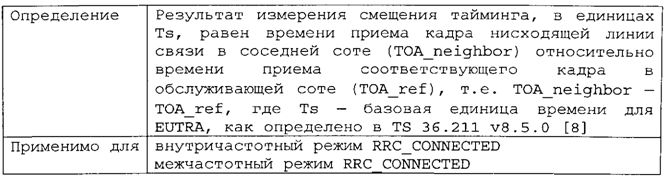
Определение для результата измерения смещения тайминга, в единицах Ts, соответствует времени приема кадра нисходящей линии связи в соседней соте (TOA_neighbor) относительно времени приема соответствующего кадра в обслуживающей соте (TOA_ref), т.е. TOA_neighbor - TOA_ref, где Ts - базовая единица времени для EUTRA, как определено в TS 36.211 v8.5.0 s11. Эта модификация системы применима для внутричастотного режима RRC_CONNECTED и межчастотного режима RRC_CONNECTED.
Формат отчета и механизм инициирования такого измерения будут определены как часть спецификации уровня MAC или RRC. Один механизм инициирования основан на инициировании отчета RSRP и RSRQ по мере того, как некая информация о смещении тайминга может стать доступной. Кроме того, инициирование может быть основано на конфигурации времени передачи TDOA-RS и TDOA-sync, для повышения точности, особенно для тех UE, что расположены в центре соты. Для UE, расположенных близко к краю соты, отчет о смещении тайминга может быть передан одновременно с отчетами RSRQ и/или RSRP.
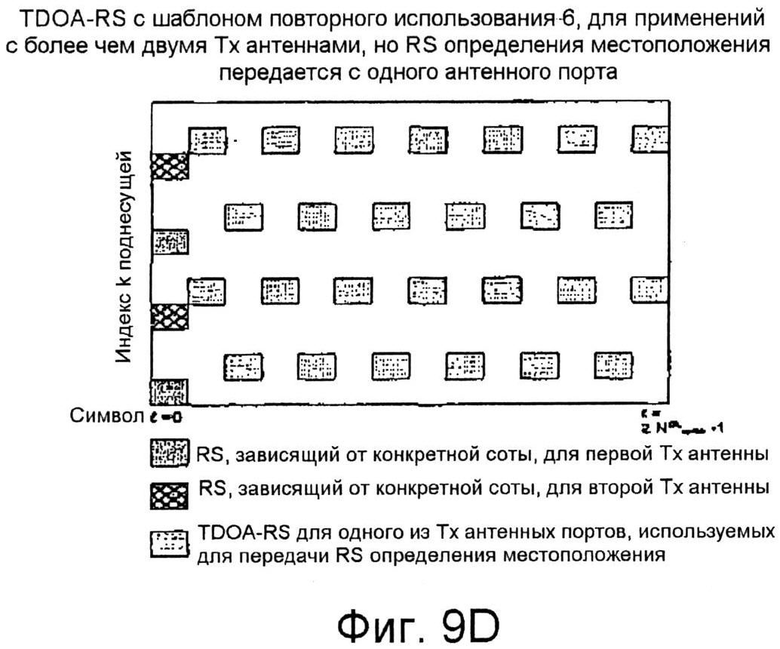
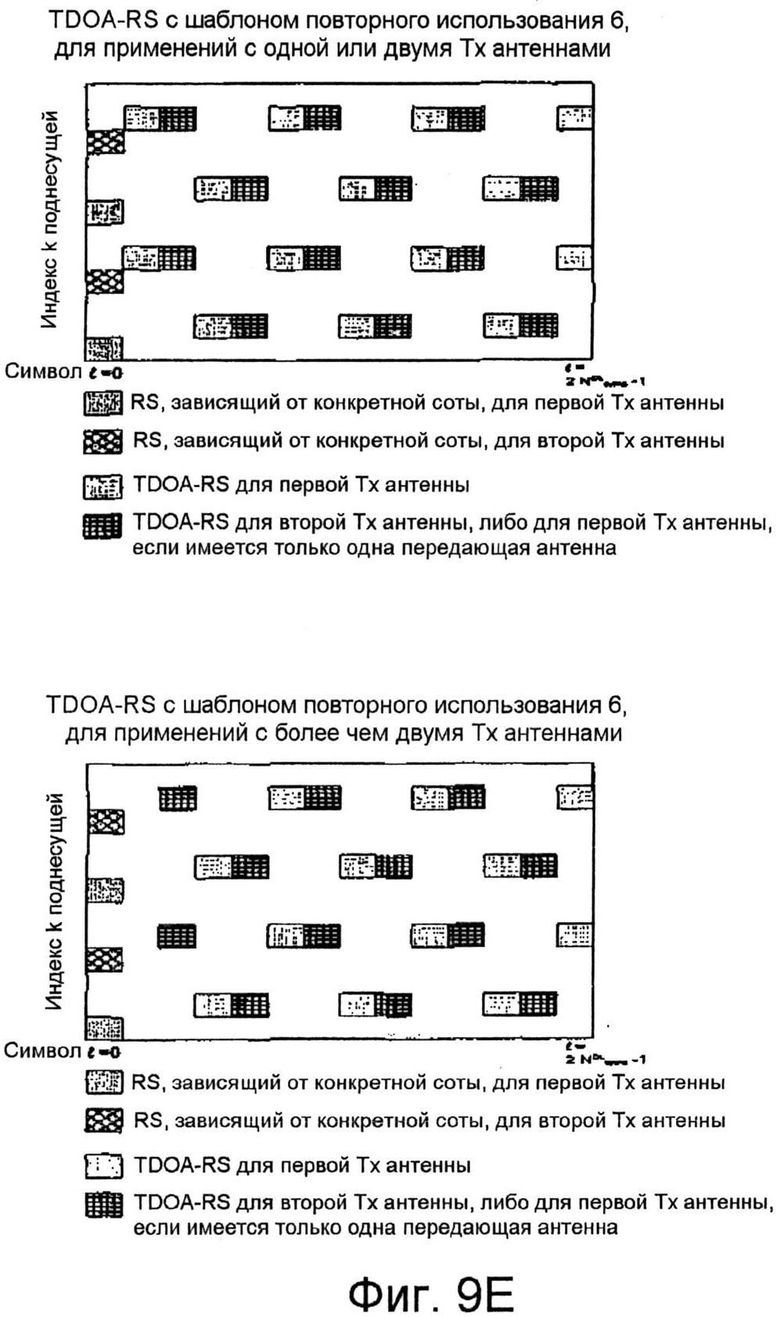
Предлагаются дополнительные опорные сигналы (RS) определения местоположения, которые обладают коэффициентом повторного использования частоты/времени/кода, равным 6 или более. Предполагается, что это значительно улучшит слышимость сигнала соседних сот для UE/MS 16 по сравнению с известными способами и системами, которые поддерживают только повторное использование с коэффициентом 3 в развернутых системах с двумя передающими антеннами.
Дополнительные подробности также предоставляются для смежного RS, который имеет аналогичную структуру с сигналами синхронизации. Можно избежать помех от передач соседних сот путем назначения ресурсов для ортогональности RS (TDOA-RS), предназначенного для определения местоположения, по времени, частоте и коду, с эффективным коэффициентом повторного использования, равным 6 или выше. Было проанализировано повторное использование частот с коэффициентом 3, но этого было недостаточно для достижения хорошей слышимости соседних сот. Таким образом, настоящее изобретение обеспечивает коэффициент повторного использования частоты 6 в новом опорном сигнале RS (TDOA-RS), помогающем определить местоположение. Подобно зависящему от соты RS (CRS), здесь имеет место зависящий от соты частотный сдвиг в шаблоне RS: V, сдвиг = N (ID соты) mod 6, как описано в Разделе 6.10.1 документа TS 36.211 v8.6.0.
Последовательности, используемые для RS, предназначенного для определения местоположения, могут быть аналогичны тем, что используются для CRS. Альтернативно, также могут использоваться другие псевдослучайные последовательности, например последовательности Задова-Чу (Zadoff-Chu). Когда используются подкадры MBSFN для передачи RS, предназначенного для определения местоположения, зависящий от соты RS передается только в символе OFDM 0 из подкадра, когда сконфигурированы один или два порта передающей антенны. Таким образом, RS, предназначенный для определения местоположения, может быть передан во всех других символах OFDM в подкадре. Однако символ OFDM I подкадра не может быть использован для RS, предназначенного для определения местоположения, когда сконфигурировано больше двух портов передающей антенны для некоторых соседних сот в развернутой сети.
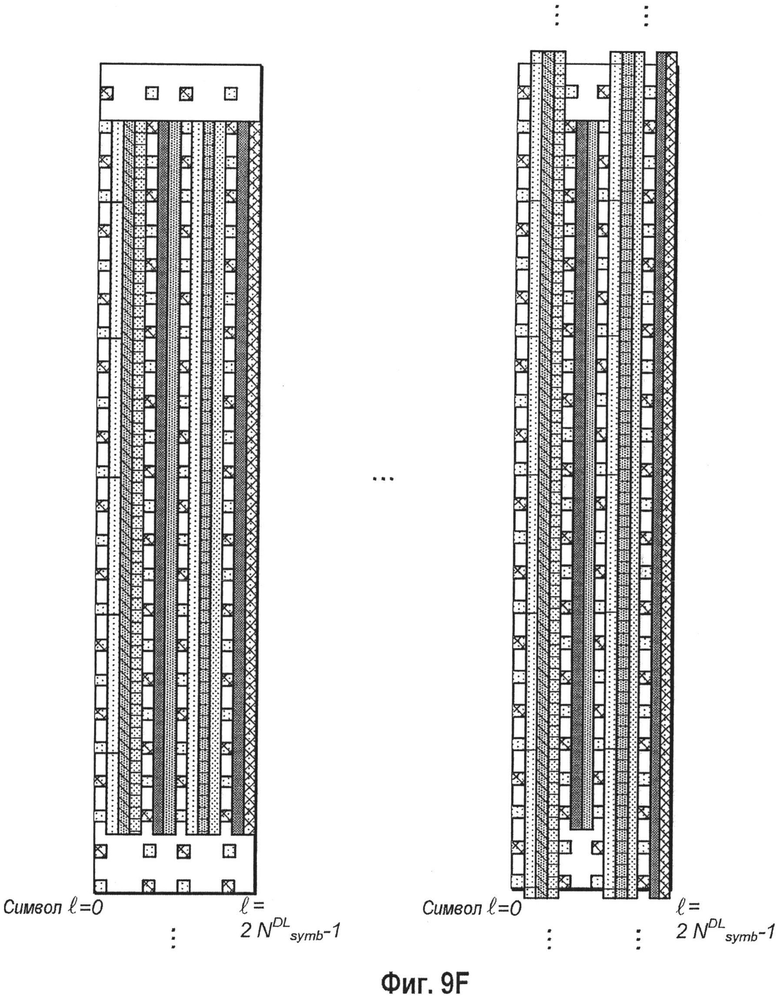
Опорный сигнал TDOA-RS может быть размещен на смежной частоте (поднесущих) в ряде ресурсных блоков. В примере, показанном на приведенном ниже графике, каждый символ OFDM, который не имеет зависящего от соты опорного сигнала RS, охватывает 6 смежных ресурсных блоков RB, и опорный сигнал TDOA-RS выделяется соседней соте для передачи последовательности, зависящей от конкретной соты. Они передаются на символах OFDM, не используемых для сигналов синхронизации и не используемых для широковещательного канала. Трафик данных не может быть запланирован на те ресурсные блоки RB, которые переносят опорный сигнал TDOA-RS, предназначенный для определения местоположения.
Если эти опорные сигналы RS передаются в тех же ресурсных блоках и в подкадре (#5), что и сигналы синхронизации, то может быть максимум Nrs=6 символов OFDM для вплоть до 6 различных соседних сот в развернутых сетях с более чем двумя передающими антеннами и Nrs=8 символов OFDM для 8 различных соседних сот в развернутых сетях, в которых используются только одна или две передающие антенны. Каждой соседней соте может быть назначено более одного символа OFDM для передачи последовательности определения местоположения. Другие подкадры и ресурсные блоки, которые не переносят сигналы синхронизации (PSS/SSS), также могут использоваться для передачи последовательности определения местоположения. Большее число ресурсных блоков RB или большая длина Nseq последовательности также могут поддерживаться, например 15 ресурсных блоков RB в системе с шириной полосы частот 3 МГц с частотой дискретизации 3,84 МГц.
Эти последовательности являются ортогональными или имеют свойства низкой кросс-корреляции с первичным (PSS) и вторичным сигналами синхронизации (SSS) и между различными соседними сотами. Один тип последовательности, которая может использоваться, является последовательностями CAZAC или последовательностями Задова-Чу (ZC), которые уже используются для различных опорных сигналов RS. Одним примером является использование различных циклических сдвигов α первичного сигнала d(n) синхронизации длины 62, как определено в Версии 8 3GPP.
Величины циклических сдвигов α могут быть выбраны так, чтобы они были отстояли друг от друга как можно дальше для различных соседних сот. Количество сдвигов должно быть функцией от ID соты. Точно так же символ OFDM, назначенный соседней соте, должен также зависеть от ID соты. Например,

где N>=1: минимальное число выборок между величинами каждого возможного циклического сдвига.
Например, для Nseq=62 и 6 желательных отличающихся величин циклического сдвига мы имеем
Символ OFDM, назначенный соседней соте с ID соты:
где l′ = символы OFDM, не содержащие CRS, PSS/SSSIPBCH, расположенные в порядке возрастания индекса l символа OFDM, начиная с l′=0 до l′=Nrs-1. Для более длинной последовательности может использоваться последовательность ZC длиной 127:
Корень этих последовательностей u может быть выбран отличающимся образом от тех, что использовались для более короткой последовательности или первичного сигнала синхронизации.
Как показано ниже, при размещении опорного сигнала TDOA-RS в смежных ресурсных блоках, TDOA-RS располагается в том же самом подкадре, что и сигналы синхронизации. Левый блок использует ту же самую длину, что и сигналы синхронизации, и правый блок использует увеличенную длину последовательности опорных сигналов RS, которая может занимать примерно 15 RB в центре полосы. Эти ресурсные блоки идентифицируются для использования в сетях с более чем 2 антеннами. Индекс 1 символа OFDM в каждом слоте должен быть зарезервирован и не использоваться для передачи RS, предназначенного для определения местоположения.
Размещение опорного сигнала TDOA-RS в шахматном порядке и в смежном шаблоне является выгодным, с повторным использованием частот с коэффициентом 6 и для достижения цели шахматного порядка. При использовании различных символов OFDM для смежного размещения передачи TDOA-RS с различными циклическими сдвигами из различных соседних сот может быть достигнут шаблон повторного использования частот больше 6.
Опорные сигналы TDOA-RS, предназначенные для определения местоположения, были описаны используя повторное использование частоты/времени/кода 6 или выше. Предполагается, что это повторное использование кода значительно улучшит слышимость сигналов соседних сот для UE, по сравнению с RS, зависящим от конкретной соты, в Release-8, где поддерживается только повторное использование 3 в развернутой системе с двумя передающими антеннами. Также предоставляется более подробная информация для смежного сигнала RS, который имеет структуру, подобную сигналам синхронизации.
Настоящее изобретение позволяет избежать помех от передач соседних сот путем назначения ресурсов для опорного сигнала RS (TDOA-RS), предназначенного для определения местоположения, ортогонально по времени, частоте и коду с эффективным коэффициентом повторного использования 6 или выше. Во время анализа методом моделирования предполагалось, что сеть синхронизирована. Разность во времени приема на мобильном терминале UE измерялась на основе либо CRS Release-8, либо предложенного PA-RS в назначенных подкадрах без передачи данных, то есть в подкадрах IPDL. Кроме того, требование измерения чувствительности межчастотного FDD устанавливалось как SCH RP>-126 дБм [6]. Требование способности к обнаружению соты было выбрано как SCH E/Iot>6 дБ. При использовании CRS Rel-8 предполагается, что сигнал может быть достоверно обнаружен при приблизительно -14 дБ из-за того, что плотность символов CRS является более высокой, чем у сигнала синхронизации.
Из результатов моделирования было найдено, что, используя только CRS Release-8, характеристики определения местоположения UE не могут удовлетворить требование фазы 2 мандата Е911 FCC US. Точность определения местоположения, в основном, ограничивается слышимостью соседних сот. Например, для порога C/I в -14 дБ, точка насыщения ошибки местоположения в 83% указывает, что вероятность того, что UE не сможет обнаружить 3 или более несмежных сот, составляет 17%.
Для стандарта, показанного в Release-8, используя сигнал CRS, коэффициент повторного использования 3 достижим для 2 антенных портов в подкадрах IPDL, то есть в подкадрах без запланированных данных. Однако в случае совместного планирования или конфигурации подкадров определения местоположения, состоящих из смеси нормальных подкадров и подкадров MBSFN для другой соты/группы сот, может быть достигнут более высокий коэффициент повторного использования, но только за счет увеличенных финансовых затрат и повышения сложности оборудования. Были проанализированы распределения ошибок определения местоположения UE для Случая-1 (ETU 3 км/час) и Случая-2 (ETU 30 км/час) моделирования 3GPP, используя CRS Release-8 с коэффициентом повторного использования 6, с порогом C/I для слышимости сот, равным -6, -10 и -14 дБ.
Из результатов моделирования было также найдено, что, используя CRS Release-8 с коэффициентом повторного использования 6, рабочие характеристики определения местоположения UE могут отвечать требованию фазы 2 FCC Е911. Кроме того, можно отметить, что на рабочие характеристики определения местоположения влияет порог C/I для слышимости сот. Конкретно, установление порога C/I на очень низкую величину приводит к большей ошибке оценок разности во времени приема сигналов, что ухудшает характеристики. С другой стороны, если порог C/I будет установлен слишком высоким, слышимость сот будет снижена. Следовательно, порог C/I может использоваться для выбора соседних сот для включения в определение местоположения UE, чтобы избежать снижения точности определения местоположения, как это вызвано оценками TDOA с большими ошибками. Порог C/I должен быть оптимизирован с компромиссом между точностью оценки TDOA и числом соседних сот, используемых при определении местоположения, т.е. при последующей стадии трилатерации, с точки зрения характеристик определения местоположения.
Шаблоны PA-RS с коэффициентом повторного использования 6 моделировались для анализа распределений ошибок определения местоположения UE для Случая-1 (ETU 3 км/час) и Случая-2 (ETU 30 км/час) моделирования 3GPP, используя дополнительный опорный сигнал определения местоположения, такой как опорный сигнал TDOA-RS или PA-RS. Моделирование проводилось для анализа использования дополнительного опорного сигнала определения местоположения с одной или двумя передающими антеннами и полосами PA-RS шириной 50, 25, 15 и 6 RB.
Из результатов моделирования с использованием дополнительного опорного сигнала определения местоположения типа TDOA-RS или PA-RS с коэффициентом повторного использования 6 было найдено, что: (1) рабочие характеристики определения местоположения UE могут отвечать требованию фазы-2 FCC Е911 с дополнительным опорным сигналом определения местоположения, таким как TDOA-RS или PA-RS, при ширине полосы 15 RB и выше в Случае-1 и в Случае-2; и (2) для ширины полосы 50 RB конфигурация антенны, используемой для передачи дополнительного опорного сигнала определения местоположения, такого как TDOA-RS или PA-RS, оказывает незначительное влияние на характеристики определения местоположения. С уменьшенной полосой передача PA-RS с двух антенн, в основном, улучшает характеристики определения местоположения из-за разнесения.
Для моделирования был использован стандартный алгоритм определения местоположения, и положение UE определяется следующим образом.
Оценивался импульсный отклик канала из обслуживающей и обнаруживаемых соседних сот, и было выявлено, что: (1) если несколько обнаруженных сот расположены рядом, сота с наилучшим качеством сигнала используется в определении местоположения, (2) когда используется множество передающих/приемных антенн, оцененные выборки импульсного отклика канала (channel tap) всех пар передающих/приемных антенн объединяются когерентно; (3) когда сконфигурированы как сигнал CRS, так и дополнительный опорный сигнал определения местоположения, такой как TDOA-RS или PA-RS, оцененные выборки импульсного отклика канала от CRS и PA-RS сначала объединяются, используя интерполяцию во временной области для каждого порта передающей (Тх) антенны, передающей и CRS, и PA-RS. Оцененные выборки импульсного отклика канала всех пар передающих и приемных антенн затем объединяются когерентно, и (4) первая прибывшая выборка (тракт) идентифицируется как самая ранняя выборка в наборе наиболее сильных выборок Ntap.
Задержка на распространение сигнала из соты определяется как задержка идентифицированной первой выборки. Разность во времени приема определяется как разность между задержкой от соседней соты и обслуживающей соты.
Положение UE оценивается из разности во времени приема для Nns соседних сот с лучшим качеством сигнала. Число измерений разности во времени приема для соседних сот ограничивается порогом качества сигнала, т.е. порогом C/I, так что измерения TDOA, которые, как ожидается, будут иметь большие ошибки, не используются для оценки местоположения, при условии, что доступно минимальное число результатов измерений, например 2 или 3, разности во времени приема для соседних сот. Может быть применена разная величина порога C/I для разного числа соседних сот, т.е. может быть множество порогов C/I.
Например, если мы имеем Nns=5 соседних сот с C/I, превышающим порог 1 C/I для слышимости, величина порога 2 C/I для точного измерения TDOA может быть установлена на относительно более высокую величину, чем в случае Nns=2. Установка пороговой величины может быть выбрана на основе рабочих характеристик TDOA для линии связи, и зависящий от соты порог C/I конфигурируется узлом eNB посредством высокоуровневой сигнализации. Может также поддерживаться зависящая от UE корректировка порога C/I. В этом моделировании мы предполагаем Ntap=6 и пороги C/I, равные -6, -10 и -14 дБ.
На основе анализа моделирования, проведенного заявителем, было найдено, что настоящее изобретение превосходит определение местоположения UE по стандарту Release-8 для опорного сигнала, зависящего от конкретной соты (CRS). Заявитель смог определить, что основанное на CRS решение имеет ограниченные рабочие характеристики определения местоположения из-за проблем со слышимостью соседних сот. При совместном планировании или конфигурации подкадров определения местоположения, состоящих из смеси нормальных подкадров и подкадров MBSFN среди различных сот/групп сот, рабочие характеристики определения местоположения, основанного на CRS, могут быть улучшены, но только с увеличенным коэффициентом повторного использования, что увеличит сложность системы и служебную нагрузку на нее.
Порог слышимости сот может быть оптимизирован, чтобы улучшить рабочие характеристики определения местоположения. Дополнительный опорный сигнал определения местоположения, такой как TDOA-RS или PA-RS, с коэффициентом повторного использования 6 обеспечивает значительно улучшенные рабочие характеристики определения местоположения по сравнению с известными методиками, и требование фазы-2 Е911 FCC может быть удовлетворено дополнительным опорным сигналом определения местоположения, таким как TDOA-RS или PA-RS, с шириной полосы не более 15 ресурсных блоков RB в системе передачи с двумя антеннами. Было проанализировано влияние предложенного дополнительного опорного сигнала определения местоположения, такого как TDOA-RS или PA-RS, на конфигурацию антенны, и было найдено, что конфигурация с двумя передающими антеннами для дополнительного опорного сигнала определения местоположения, такого как TDOA-RS или PA-RS, улучшает рабочие характеристики определения местоположения для подкадров определения местоположения на основе нормального подкадра без данных или подкадра MBSFN без данных и CRS в области данных.
Было также определено, что точность оценки разности во времени приема увеличилась с увеличением ширины полосы опорного сигнала, предназначенного для содействия в определении местоположения, такого как TDOA-RS или PA-RS. Опорный сигнал, предназначенный для содействия в определении местоположения, такой как TDOA-RS или PA-RS, не нуждается в полной полосе, даже несмотря на то, что ошибка в оценке разности времени приема вдвое больше в случае половинной полосы, чем таковая для случая полной полосы. Результирующие рабочие характеристики определения местоположения после трилатерации могут по-прежнему удовлетворять требованиям FCC.
Шаблоны двух предложенных дополнительных опорных сигналов определения местоположения, таких как TDOA-RS или PA-RS, показаны для конфигураций с одной антенной и двумя антеннами соответственно.
Вышеописанные варианты воплощения настоящего изобретения являются только примерами. Специалисты в данной области техники могут выполнить модификации и изменения в отношении конкретных вариантов воплощения, не выходя за рамки объема заявки. В описании приведены многочисленные детали, чтобы обеспечить понимание настоящего изобретения. Однако специалистам в данной области техники понятно, что настоящее изобретение может быть осуществлено без этих деталей. Хотя изобретение было раскрыто на ограниченном количестве вариантов воплощения, специалисты в данной области техники на их основе смогут сделать различные модификации и изменения. Предполагается, что прилагаемая формула изобретения охватывает все такие модификации и изменения, которые подпадают под истинную сущность и объем изобретения.

Изобретение относится к мобильной связи. Технический результат заключается в улучшении слышимости соседней ячейки, когда пользовательское оборудование располагается вблизи обслуживающей базовой станции. Технический результат достигается вводом дополнительного опорного сигнала, который может быть обнаружен при низкой чувствительности и низком отношении сигнал-шум, путем повторного использования частоты сигналов, используемых для измерения разницы во времени прибытия (TDOA), например ортогональности сигналов, переданных от обслуживающих базовых станций и различных соседних базовых станций. Новый опорный сигнал, названный TDOA-RS, предлагается для улучшения слышимости соседних базовых станций в сотовой сети, которая развернута в системе 3GPP EU-TRAN (LTE), и сигнал TDOA-RS может быть передан в любых ресурсных блоках (RB) для подкадра POSCH и/или MBSFN независимо от того, находится ли последний на несущей, поддерживающей и РМСН, и POSCH, или нет. Также может быть введен дополнительный сигнал синхронизации (TDOA-sync). 3 н. и 17 з.п. ф-лы, 18 ил.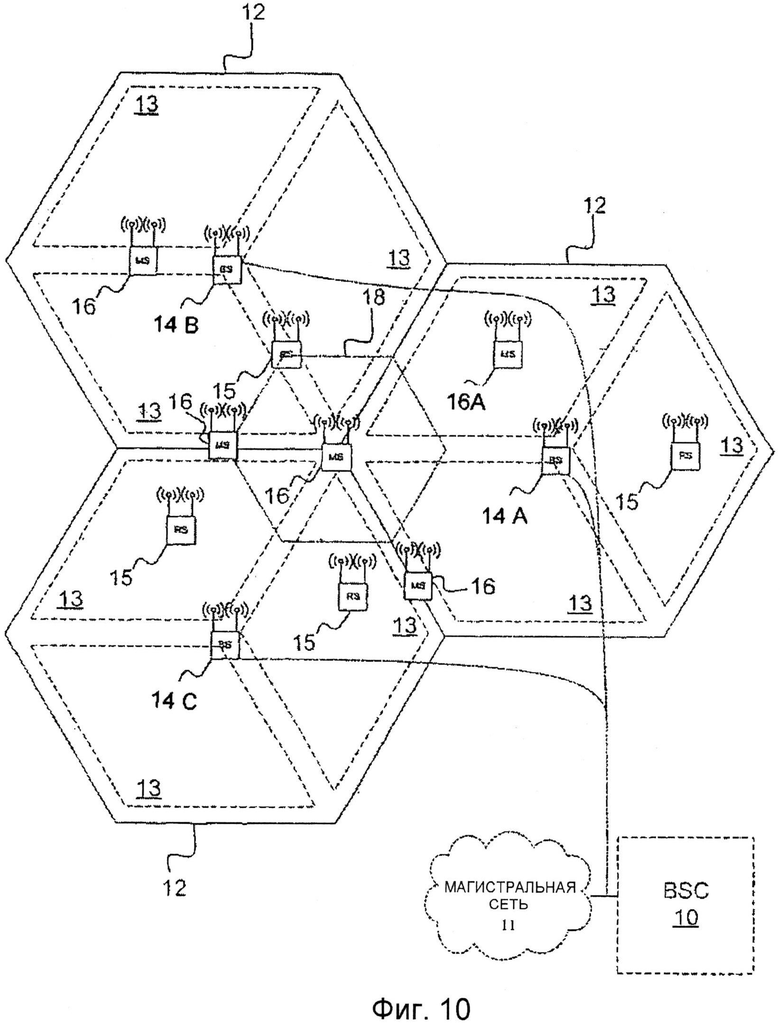
1. Система беспроводной связи, содержащая:
одну или более базовых станций сот, выполненных с возможностью передавать сигналы на мобильное устройство, расположенное в обслуживающей соте, причем эти одна или более базовых станций сот выполнены с возможностью осуществлять связь с мобильным устройством на основе протокола беспроводной передачи пакетов данных,
при этом базовая станция обслуживающей соты выполнена с возможностью осуществлять связь с мобильным устройством с использованием протокола беспроводной передачи пакетов данных,
при этом упомянутые одна или более базовых станций сот выполнены с возможностью передавать опорный сигнал для определения разности во времени приема (TDOA-RS), который является используемым для измерения разности во времени приема для определения местоположения мобильного устройства в сети, при этом TDOA-RS включается в один или более ресурсных блоков;
при этом упомянутые одна или более базовых станций сот выполнены с возможностью:
передавать TDOA-RS с использованием первой поднесущей в упомянутых одном или более ресурсных блоках для первого выполнения передачи,
передавать TDOA-RS с использованием второй поднесущей, отличающейся от первой поднесущей, в упомянутых одном или более ресурсных блоках для второго выполнения передачи, и
передавать TDOA-RS с использованием одного или более первых ресурсных элементов, которые зарезервированы для упомянутых одной или более базовых станций сот, при этом один или более вторых ресурсных элементов, которые зарезервированы для одной или более базовых станций соседних сот, не используются упомянутыми одной или более базовыми станциями сот для передачи TDOA-RS.
2. Система по п.1, в которой опорный сигнал для определения разности во времени приема (TDOA-RS) передается в любых ресурсных блоках (RB) для подкадра физического совместно используемого канала нисходящей линии связи (PDSCH) и/или одночастотной сети групповой/широковещательной передачи (MBSFN).
3. Система по п.1, в которой упомянутые один или более первых ресурсных элементов представляют собой один или более ресурсных блоков.
4. Система по п.1, в которой упомянутые одна или более базовых станций сот выполнены с возможностью использования одной или более ретрансляционных станций для передачи сигналов в мобильное устройство.
5. Система по п.1, в которой упомянутые один или более ресурсных блоков являются смежными ресурсными блоками.
6. Система по п.1, в которой упомянутые одна или более базовых станций сот дополнительно выполнены с возможностью передавать сигнал синхронизации для определения разности во времени приема (TDOA-sync) для TDOA-RS посредством скачкообразной перестройки частоты по поднесущим одного или более ресурсных блоков и посредством скачкообразной перестройки среди различных частотных ресурсов для разных выполнений передачи.
7. Система по п.6, в которой сигнал синхронизации для определения разности во времени приема (TDOA-sync) передается в символах OFDMA, отличающихся от тех, что используются в канале синхронизации.
8. Система по п.1, в которой упомянутые один или более ресурсных блоков, переносящие опорный сигнал для определения разности во времени приема (TDOA-RS), являются повторно используемыми с коэффициентом 6.
9. Мобильное устройство, содержащее:
один или более процессорных элементов, выполненных с возможностью определять разность во времени приема для множества опорных сигналов для определения разности во времени приема (TDOA-RS) в одном или более ресурсных блоках, принятых от базовой станции соты с использованием протокола беспроводной передачи пакетов данных,
при этом один или более из данного множества TDOA-RS переданы с использованием первой поднесущей в упомянутых одном или более ресурсных блоках для первого выполнения передачи,
при этом один или более из упомянутого множества TDOA-RS переданы с использованием второй поднесущей, отличающейся от первой поднесущей, в упомянутых одном или более ресурсных блоках для второго выполнения передачи, и
при этом TDOA-RS передан с использованием одного или более первых ресурсных элементов, которые зарезервированы для упомянутой базовой станции соты, причем один или более вторых ресурсных элементов, которые зарезервированы для передачи TDOA-RS одной или более базовыми станциями соседних сот, не используются упомянутой базовой станцией соты для передачи TDOA-RS.
10. Мобильное устройство по п.9, при этом упомянутое множество TDOA-RS передаются в любых ресурсных блоках (RB) для подкадра PDSCH и/или MBSFN.
11. Мобильное устройство по п.9, при этом упомянутые один или более первых ресурсных элементов представляют собой один или более ресурсных блоков.
12. Мобильное устройство по п.9, при этом упомянутые один или более ресурсных блоков передаются в смежных ресурсных блоках.
13. Мобильное устройство по п.9, при этом упомянутые один или более ресурсных блоков находятся в канале синхронизации.
14. Мобильное устройство по п.9, в котором упомянутые один или более процессорных элементов дополнительно выполнены с возможностью определять разность во времени приема на основе одного или более сигналов синхронизации для определения разности во времени приема.
15. Мобильное устройство по п.9, при этом упомянутые один или более ресурсных блоков являются повторно используемыми с коэффициентом 6.
16. Способ передачи, с использованием протокола беспроводной передачи пакетов данных, множества опорных сигналов для определения разности во времени приема (TDOA-RS) на мобильное устройство с использованием одного или более ресурсных блоков, при этом данная передача включает в себя этапы, на которых:
передают TDOA-RS с использованием первой поднесущей в упомянутых одном или более ресурсных блоках для первого выполнения передачи;
передают TDOA-RS с использованием второй поднесущей, отличающейся от первой поднесущей, в упомянутых одном или более ресурсных блоках для второго выполнения передачи; и
передают TDOA-RS с использованием одного или более первых ресурсных элементов, которые зарезервированы для базовой станции соты, при этом один или более вторых ресурсных элементов, которые зарезервированы для одной или более базовых станций соседних сот, не используются упомянутой базовой станцией соты для передачи TDOA-RS.
17. Способ по п.16, в котором упомянутое множество TDOA-RS передаются в любых ресурсных блоках (RB) для подкадра PDSCH и/или MBSFN.
18. Способ по п.16, в котором упомянутое множество TDOA-RS передаются в смежных ресурсных блоках.
19. Способ по п.16, дополнительно содержащий этап, на котором передают сигнал синхронизации для определения разности во времени приема (TDOA-sync) в одном или более символах OFDMA.
20. Способ по п.19, в котором упомянутые один или более символов OFDMA используются в канале синхронизации.
| WO 2008008685 A2, 17.01.2008 | |||
| US 2005003831 A1, 06.01.2005 | |||
| Приливная ГЭС | 1989 |
|
SU1642055A1 |
| СПОСОБ И СИСТЕМА ДЛЯ ХРАНЕНИЯ И БЫСТРОГО ИЗВЛЕЧЕНИЯ ВЫСОТНЫХ ОТМЕТОК ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМАХ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2003 |
|
RU2326434C2 |

