ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к электронным измерительным устройствам и, в частности, к емкостному датчику, способу детектирования и способу изготовления такого датчика.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В области электронных измерительных устройств часто бывает необходимо определить физическое перемещение или ускорение аппарата под действием внешней силы. Кроме того, может быть также необходимо определить величину и направление такой силы. Для выполнения такого рода измерений на аппарат могут быть установлены или включены в его состав устройства, чувствительные к движению или к ускорению. В частности, были разработаны датчики МЭМС-типа (технология микроэлектромеханических систем), предназначенные для включения в состав микроэлектронных схем, что позволяет создавать очень экономичные небольшие и точные датчики движения.
МЭМС-устройства представляют собой комбинацию микромеханических и микроэлектронных систем. Обычно МЭМС-устройство содержит подвижную микромеханическую структуру и микроэлектронное устройство на основе кремния, которое изготовлено с использованием производственных процессов такого же типа, которые используются при изготовлении интегральных схем. Одним из известных датчиков МЭМС-типа является емкостной МЭМС-преобразователь. Такие преобразователи используются в различных приложениях, например в системах автомобильных воздушных подушек. Механическая конструкция в преобразователях такого типа содержит емкостную пластину или электрод, которая прикреплена к контрольной массе и подвешена рядом с другой емкостной пластиной или электродом. Если контрольная масса перемещается, происходит вызываемое этим смещением изменение емкости подвешенных емкостных электродов. Это изменение емкости детектируется микроэлектронными устройствами и определяет величину ускорения. Датчики МЭМС-типа были разработаны для детектирования движения в одном, двух и даже в трех измерениях.
Было обнаружено, что характеристики МЭМС-датчиков поперечного типа при использовании периодических поверхностных наборов электродов с мелким шагом повышаются. Однако для устройств с большим динамическим диапазоном контрольная масса может переместиться более чем на один шаг набора электродов, что приведет к потере возможности определения положения, если оно будет основываться только на емкости датчика набора. Это может затруднить определение смещения только на основе изменения емкости.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг. 1 изображает вид сбоку в поперечном сечении датчика, имеющего пару емкостных электродов с переменным перекрытием;
фиг. 2 изображает общий вид датчика движения, имеющего динамический емкостной электрод, установленный на подвижной контрольной массе, а также частично перекрывающий статический электрод, установленный на неподвижной опоре;
фиг. 3 изображает общий вид датчика движения, имеющего множественные динамические емкостные электроды, установленные на контрольной массе, а также частично перекрывающие множественные статические электроды;
фиг. 4 изображает вид в поперечном сечении одного из вариантов исполнения емкостного датчика МЭМС-типа;
фиг. 5 изображает вид сверху, показывающий набор периодических электродов в одном варианте исполнения двухмерного емкостного датчика МЭМС-типа;
фиг. 6 изображает общий вид одного варианта исполнения емкостного датчика, имеющего множество блоков электродов, выполненные с возможностью детектирования движения по одной оси;
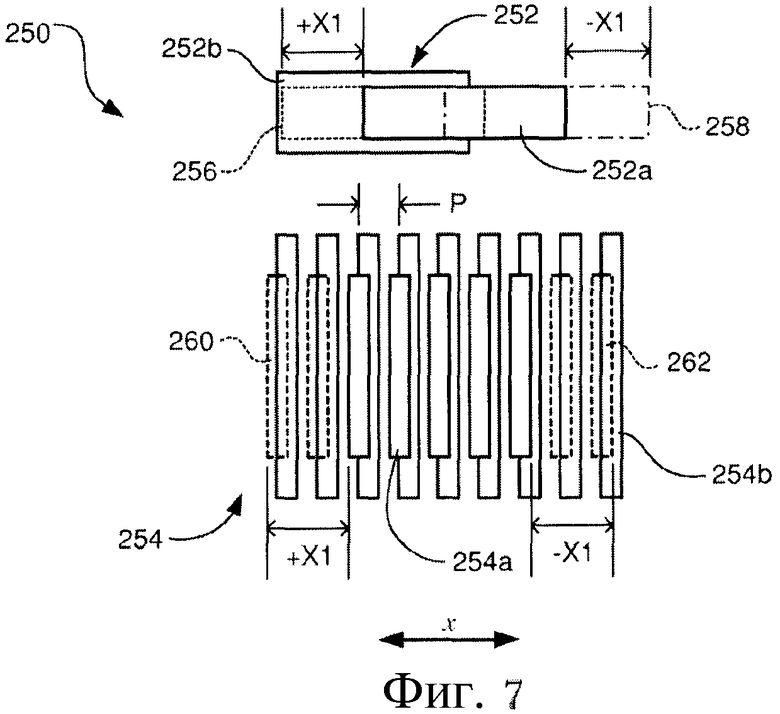
фиг. 7 изображает вид сверху другого варианта исполнения системы емкостного датчика, имеющей блок абсолютных электродов и блок периодических электродов, выполненных с возможностью детектирования движения по одной оси;
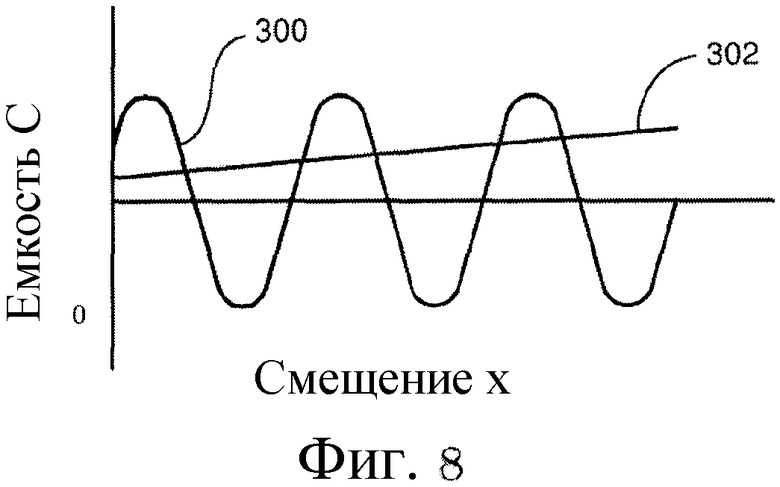
фиг. 8 изображает диаграмму емкости в зависимости от смещения, показывающую соответствующие значения емкости для блока периодических электродов и блока абсолютных электродов;
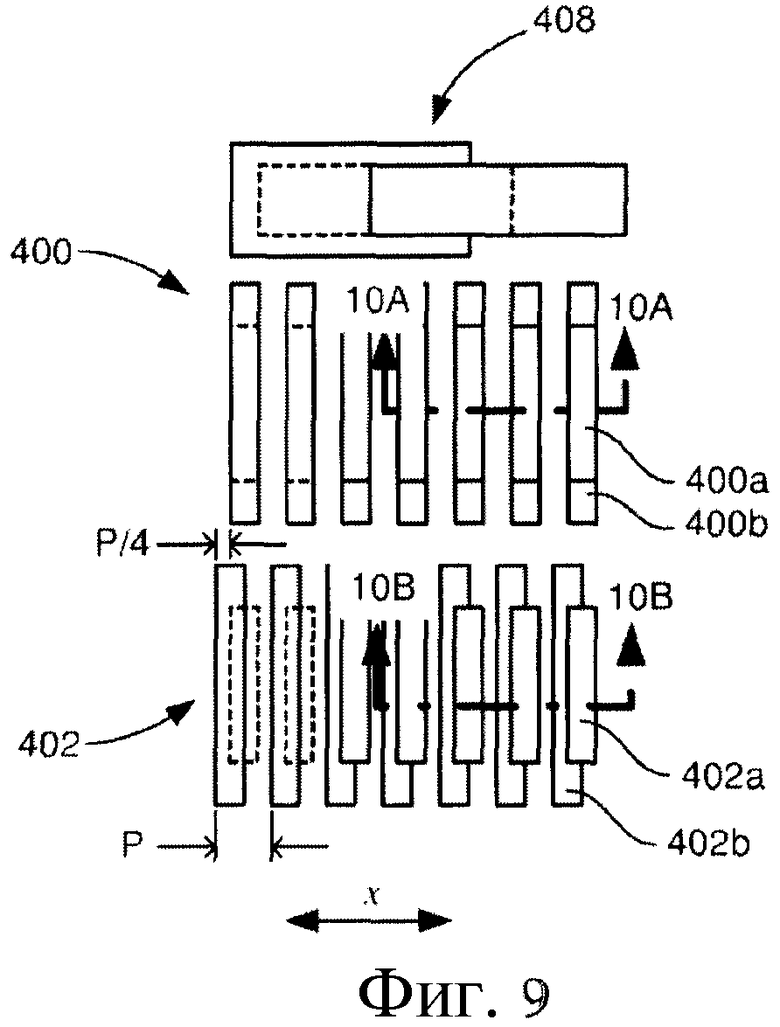
фиг. 9 изображает вид сверху другого варианта исполнения системы емкостного датчика, имеющей один блок абсолютных электродов и два блока периодических электродов, выполненных с возможностью детектирования движения по одной оси;
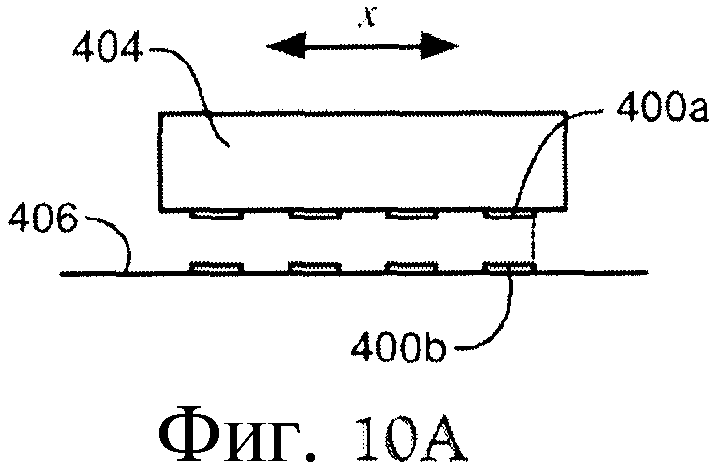
фиг. 10А изображает вид в поперечном сечении одного варианта исполнения стационарной части и части контрольной массы емкостного датчика движения, имеющего блок периодических электродов с электродами, ориентированными, по существу, в исходное положение;
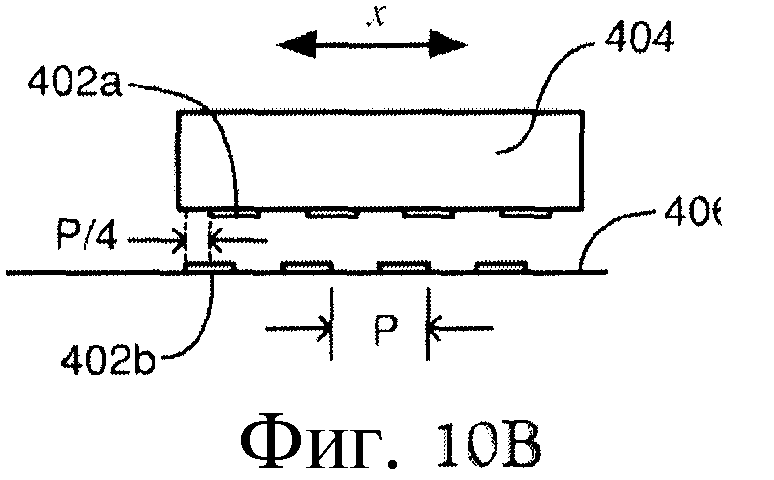
фиг. 10В изображает вид в поперечном сечении одного варианта исполнения неподвижной части и части контрольной массы емкостного датчика движения, имеющего блок периодических электродов с электродами, смещенными примерно на 90° относительно исходного положения;
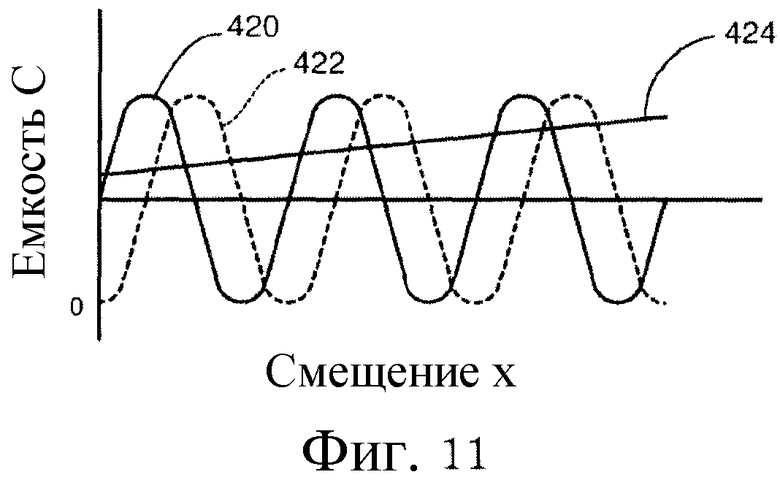
фиг. 11 изображает диаграмму емкости в зависимости от смещения, показывающую соответствующие значения емкости для двух блоков периодических электродов, которые смещены на 90°, и для блока абсолютных электродов; и
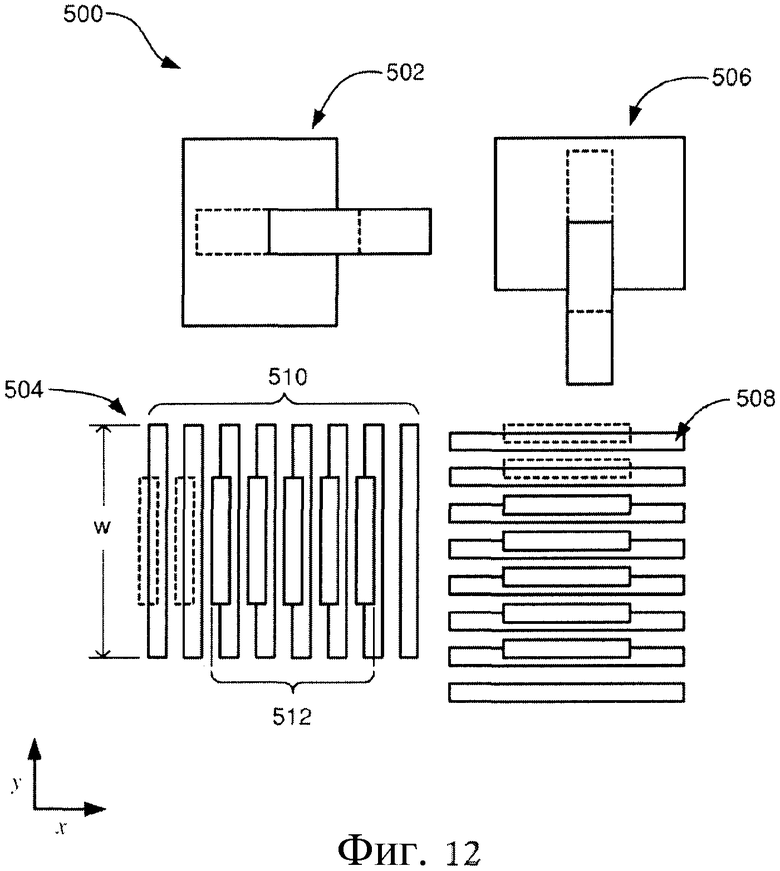
фиг. 12 изображает вид сверху варианта исполнения системы емкостного датчика, имеющей блок абсолютных электродов и блок периодических электродов, выполненных с возможностью детектирования движения по каждой из двух осей.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Далее будут выполняться ссылки на показанные на чертежах иллюстративные варианты исполнения, и для их описания будет использоваться специфический язык. Тем не менее, следует понимать, что этим не преследуется цель какого-либо ограничения объема настоящего изобретения. Альтернативные и дополнительные модификации показанных здесь признаков, а также дополнительные варианты использования проиллюстрированных здесь принципов, которые возникнут у специалистов в данной области техники, владеющих предметом описания, должны рассматриваться в объеме настоящего описания.
Как отмечено выше, были разработаны емкостные МЭМС-преобразователи, которые используются во множестве приложений. Эти датчики обычно включают в себя одну или большее количество пар емкостных электродов, которые изменяют емкость при перемещении контрольной массы. Датчики МЭМС-типа были разработаны для детектирования ускорения и движения в одном, двух и даже в трех измерениях.
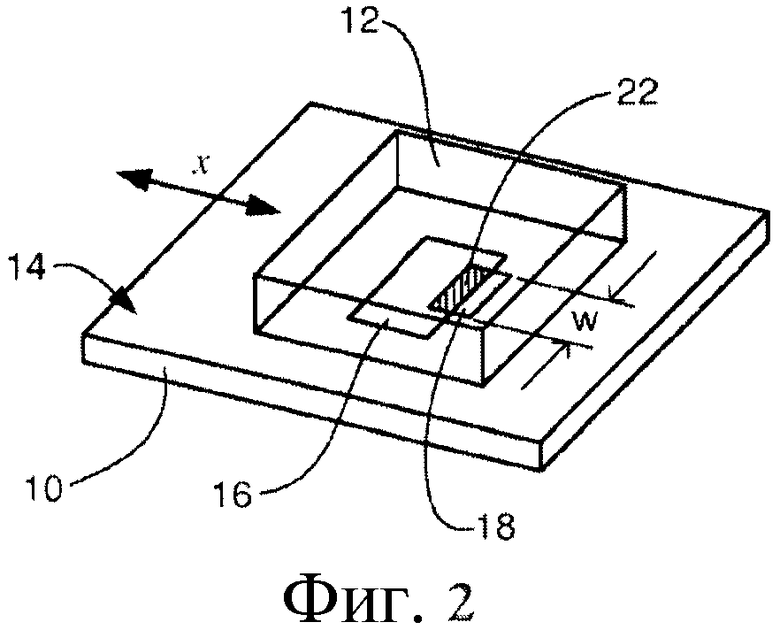
Один из примеров датчика переменной емкости показан на фиг. 1 и 2. Вместо использования переменного зазора конденсаторных пластин, который может ограничивать динамический диапазон устройства, этот датчик для детектирования движения использует перекрывающиеся пластины переменного конденсатора. Этот датчик включает в себя неподвижную подложку 10 и контрольную массу 12, которая подвижна по оси, обозначенной как ось Х, в направлении, которое по существу параллельно верхней поверхности 14 подложки. Подложка и контрольная масса могут представлять собой кремниевые пластины, которые изготавливаются с использованием технологии производства интегральных микросхем. Фиг. 1 представляет собой вид в частичном поперечном сечении, а фиг. 2 - общий вид, при этом контрольная масса изображена как прозрачная, с целью отображения относительного положения электродов. Контрольная масса имеет исходное положение (то есть положение, в котором она покоится, когда к ней не приложено никакой силы) и может двигаться в любом направлении вдоль своей оси движения в зависимости от направления силы, которая приложена к структуре, на которой установлен датчик.
Датчик данного типа может быть изготовлен с использованием техники крепления пластин, которая позволяет использовать поверхностные электроды. Неподвижный поверхностный электрод 16 прикреплен к верхней поверхности 14 подложки 10, а подвижный поверхностный электрод 18 прикреплен к нижней поверхности 20 контрольной массы 12. Контрольная масса и подложка могут быть из кремниевого материала и могут включать в себя электрическую схему (не показана) для подсоединения электродов подложки и контрольной массы к электрической схеме (не показана) для получения и интерпретации сигналов от датчика.
Два поверхностных электрода 16, 18 разделены зазором d и работают как конденсаторные пластины переменного конденсатора. Как показано на фиг. 2, подвижный электрод имеет ширину w (измеренную перпендикулярно оси движения). В зависимости от положения контрольной массы 12 некоторый участок переменного электрода может быть расположен прямо над неподвижным электродом. На фиг. 1 переменный электрод перекрывает неподвижный электрод на величину х. Два электрода, таким образом, имеют зону перекрытия А, которая равна:
А = wwwwwwxwx (1)
Эта зона перекрытия на фиг. 2 обозначена заштрихованной зоной 22. При таком расположении конденсаторных пластин датчик обеспечивает переменную емкость, которая пропорциональна площади зоны перекрытия А электродов. Емкость С аппроксимируется уравнением:
С≈(еА)/d, (2)
где е - диэлектрическая постоянная материала зазора, d - размер зазора между электродами, а А - площадь перекрытия пластин.
Поскольку движение контрольной массы происходит в таком направлении, которое перпендикулярно зазору, то зазор d будет постоянным, а емкость будет изменяться пропорционально перекрытию А поверхности электродов, а не изменению в расстоянии зазора.
Следует заметить, что динамический диапазон этого датчика ограничен длиной электродов в направлении Х. По этой причине пластины электродов обычно выполнены достаточно длинными, так что перемещение в положительном или отрицательном направлении Х в ответ на внешнюю силу никогда не приведет к полному перекрытию пластин или к тому, чтобы они не перекрывались вовсе. Любой диапазон движения, при котором имеет место полное перекрытие пластин или отсутствие перекрытия, приведет к величине емкости, которая не изменяется при движении.
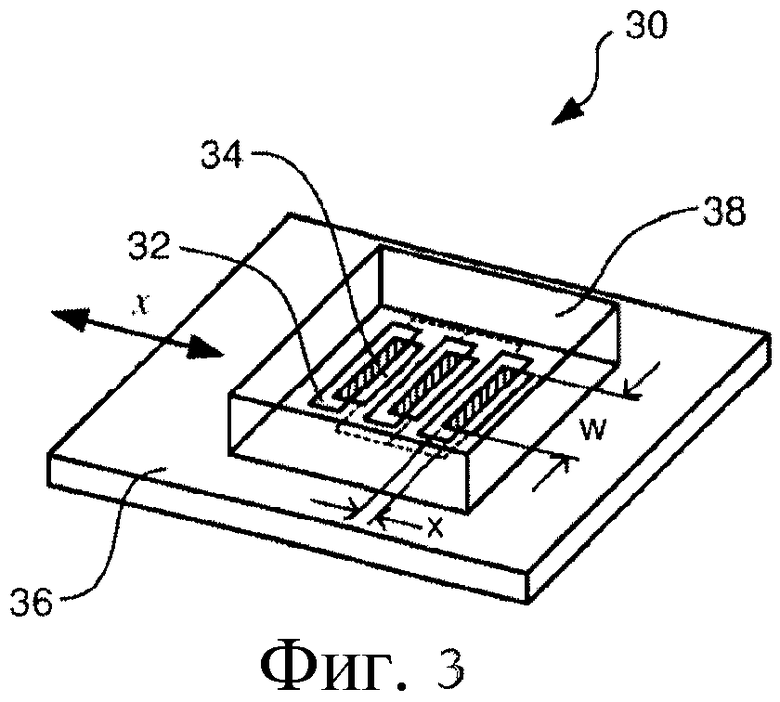
Для повышения чувствительности датчика такого типа необходимо большое изменение емкости при небольшом движении (смещении). То есть желательно, чтобы изменение в А для данного изменения по х было относительно велико. Это может быть достигнуто использованием поверхностных электродов с мелким шагом. Общий вид датчика 30 переменной емкости, имеющего набор поверхностных электродов 32, 34 с мелким шагом, показан на фиг. 3. Для увеличения "дельты А" относительно смещения х контрольной массы ширина w электродов эффективно увеличена добавлением блоков электродных пластин к неподвижной подложке 36 и контрольной массы 38, соответственно, как показано на фиг. 3. Эти электроды электрически соединены параллельно, так что группа неподвижных электродов 32 действует как один электрод и группа подвижных электродов 34 действует как один электрод. Показанная на фиг. 3 конфигурация датчика имеет тройную ширину w электрода, которую он бы имел только с одним блоком электродов, и, таким образом, имеет "дельту А", которая для данного смещения х приблизительно в три раза больше.
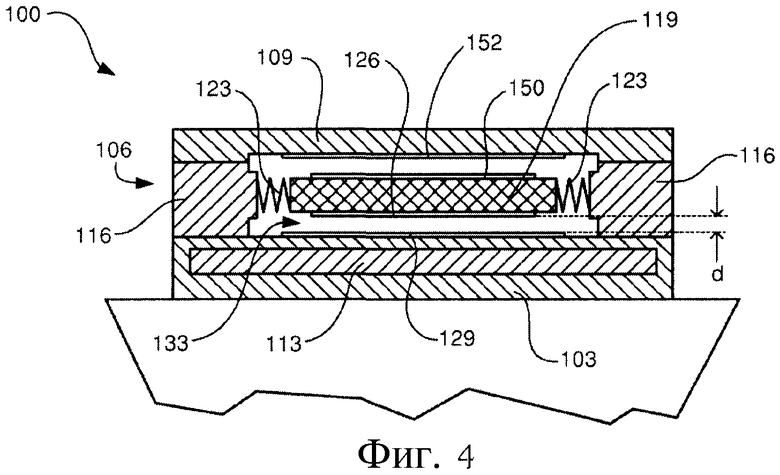
Хотя на фиг. 3 показаны три блока электродов, в данном подходе может использоваться почти любое количество электродов. Для покрытия всей площади контрольной массы могут использоваться дополнительные пластины, и они могут быть ориентированы в различных направлениях для детектирования движения по нескольким осям, что далее будет пояснено более подробно. На фиг. 4 показан вариант исполнения датчика 100, который включает в себя три слоя или пластины. В частности, датчик 100 включает в себя пластину 103 с электроникой, пластину 106 контрольной массы и закрывающую пластину 109. В пластину 103 с электроникой могут быть включены электронные компоненты 113 типа КМОП, которые могут быть соединены с различными электрическими компонентами пластины 106 контрольной массы и закрывающей пластины 109. Кроме того, понятно, КМОП-электроника 113 может иметь выходные разъемы для соединения с электронными компонентами, внешними относительно датчика 100. В некоторых случаях может быть недопустимо генерируемое КМОП-электроникой 113 тепло, и в этом случае КМОП-электроника может быть расположена в отдельной, но находящейся рядом матрице с электроникой и т.д. Пластина 106 контрольной массы включает в себя опору 116, которая механически сопряжена с контрольной массой 119. Хотя на чертеже показано поперечное сечение датчика 100, в соответствии с одним вариантом исполнения опора 116 как часть пластины 106 контрольной массы окружает контрольную массу 119. Следовательно, в одном варианте исполнения пластина 103 с электроникой опора 116 и закрывающая пластина 109 образуют "карман", внутри которого подвешена контрольная масса 119.
В соответствии с различными вариантами исполнения настоящего изобретения все вместе, плата 103 с электроникой, опора 116 и закрывающая пластина 109 образуют опорную конструкцию, к которой через совместимый разъем прикреплена контрольная масса 119. В этом отношении совместимый разъем может содержать упругие подвесные элементы 123 с большим коэффициентом пропорциональности, известные специалистам в данной области техники.
Датчик 100 дополнительно включает в себя первый набор 126 электродов, который расположен на контрольной массе 119. В одном варианте исполнения первый набор 126 электродов расположен на поверхности контрольной массы 119, которая противоположна верхней поверхности пластины 103 с электроникой. Как можно понять, поверхность контрольной массы 119, на которой расположен первый набор 126 электродов, является по существу плоской поверхностью.
Второй набор 129 электродов расположен на поверхности пластины 103 с электроникой, напротив первого набора 126 электродов, расположенного на контрольной массе 119. Вследствие того как контрольная масса 119 подвешена над пластиной 103 с электроникой, между первым набором 126 электродов и вторым набором 129 электродов образуется по существу равномерный зазор 133. Величина зазора 133 обозначена как расстояние d. Расстояние d может быть, например, в пределах от 1 до 3 микрометров или же оно может иметь другую величину, как представляется необходимым.
Контрольная масса 119 подвешена над пластиной 103 с электроникой таким образом, что первый набор 126 электродов и второй набор 129 электродов по существу лежат в плоскостях, параллельных друг другу, так что зазор 133 по существу является равномерным по всему перекрытию между первым и вторым наборами 126 и 129 электродов. Альтернативно наборы 126, 129 электродов могут быть размещены в других плоскостях или структурах на пластине 103 с электроникой или на контрольной массе 119, как представляется удобным. В дополнение к первому и второму набору электродов на других участках контрольной массы или связанной конструкции пластины также могут быть помещены электроды. Например, на верхней поверхности контрольной массы и на противолежащей поверхности верхней пластины 109 могут быть размещены третий и четвертый наборы 150 и 152 электродов, как показано на фиг. 4. Могут быть использованы и другие конфигурации. Упругие подвесные элементы 123 с высоким коэффициентом пропорциональности обеспечивают такую степень согласованности, которая позволяет контрольной массе 119 перемещаться относительно опорной конструкции датчика 100. Вследствие конструкции упругих подвесных элементов 123 смещение контрольной массы 119 из положения покоя по существу ограничено направлением, которое по существу параллельно второму набору 129 электродов, который расположен на верхней поверхности пластины 103 с электроникой. Упругие подвесные элементы 123 сконфигурированы таким образом, чтобы контрольная масса 119 могла совершать перемещения на заданную величину в направлении, параллельном второму набору 129 электродов, так чтобы зазор 133 оставался по существу равномерным по всей возможной протяженности ее движения. Конструкция упругих подвесных элементов 123 обеспечивает лишь минимальное перемещение контрольной массы 119 в направлении, перпендикулярном второму набору 129 электродов, в то же время позволяя ей совершать перемещение на нужную величину в направлении, параллельном второму набору 129 электродов.
Далее в качестве примера приводится краткое описание работы датчика 100 по чувствительности к ускорению. В частности, датчик 100 прикреплен к конструкции или транспортному средству, которое испытывает ускорение, величину которого желательно измерить. Датчик 100 прикреплен к конструкции или устройству таким образом, что направление ускорения совпадает с направлением разрешенного перемещения контрольной массы 119, обеспеченного упругими подвесными элементами 123, как говорилось выше. Если конструкция или транспортное средство испытывает ускорение, контрольная масса 119 будет перемещаться, как описано выше. Вследствие того факта, что первый набор 126 электродов и второй набор 129 электродов расположены на контрольной массе 119 и на пластине 103 с электроникой, то со смещением наборов относительно друг от друга одно или большее количество емкостей между первым и вторым наборами 126 и 129 электродов будут изменяться.
Для детектирования или восприятия степени изменения емкости между наборами 126 и 129 электродов может быть использована КМОП-электроника 113 и/или внешние электронные компоненты. Такая схема на основе изменения емкостей может генерировать соответствующие сигналы, которые пропорциональны ускорению, испытываемому датчиком 100. Альтернативно может быть использован замкнутый контур для удержания контрольной массы 119 во время действия ускорения в предварительно определенном положении. Такая схема содержит замкнутый контур, который на основе обратной связи по положению от первого и второго наборов 126 и 129 электродов выдает активирующие сигналы, вынуждающие контрольную массу 119 оставаться в предопределенном местоположении.
В то время как движение контрольной массы 119 по существу ограничено плоскостью, которая по существу параллельна второму набору 129 электродов, имея в виду, что упругие подвесные элементы 123 по своей природе эластичны, контрольная масса 119 может смещаться относительно второго набора 129 электродов в направлении, перпендикулярном второму набору 129 электродов. Другими словами, может иметь место нежелательное перемещение контрольной массы 119, которое может привести к нежелательному изменению зазора 133. В соответствии с различными вариантами исполнения настоящего изобретения для исключения каких-либо изменений в заданных взаимных емкостных связях между первым и вторым наборами 126 и 129 электродов вследствие изменения зазора 133 может быть использована нормализация, что будет описано далее.
На фиг. 5 показаны первый и второй наборы 126 и 129 электродов в соответствии с одним вариантом исполнения настоящего изобретения. Как видно, на иллюстрации действительно изображены первый набор 126 множества электродов и второй набор 129 множества электродов. Например, в показанной конфигурации может быть четыре пары первых и вторых наборов 126 и 129 электродов. При условии, что первый и второй наборы 126 и 129 электродов ориентированы, как показано на фиг. 5, может детектироваться перемещение контрольной массы 119 в двух направлениях в плоскости, которая параллельна второму набору 129 электродов. Соответственно, в одном варианте исполнения упругие подвесные элементы 123 сконфигурированы таким образом, что контрольная масса 119 может перемещаться в двух направлениях. Альтернативно упругие подвесные элементы могут быть сконфигурированы таким образом, чтобы обеспечивать перемещение в одном направлении, при этом первый и второй наборы 126 и 129 электродов расположены каждый с одной ориентацией для детектирования такого одномерного перемещения.
Каждый отдельный электрод содержит множество электродов. В частности, каждый первый набор 126 электродов выполнен из множества первых электродов 143, а второй набор 129 электродов выполнен из множества вторых электродов 146. Для каждого из первых наборов 126 электродов имеется соответствующий второй набор 129 электродов. Каждый из первых наборов 126 электродов меньше по размерам, чем соответствующий второй набор 129 электродов, учитывая тот факт, что первые наборы 126 электродов являются подвижными. Следовательно, даже если первые наборы 126 электродов перемещаются относительно соответствующих вторых наборов 129 электродов, всегда существует по существу одинаковое перекрытие между соответствующими парами первых и вторых наборов электродов во всем диапазоне движения контрольной массы 119.
Каждый из первых и вторых электродов 143 и 146 содержит прямоугольные проводники, которые расположены смежно друг с другом. Расстояние между общей точкой в каждом из электродов 143 и 146 для соответствующего набора электродов называется шагом набора электродов. Хотя электроды 143 и 146 показаны в виде прямоугольных проводников, следует понимать, что при необходимости в соответствии с описанными здесь принципами могут быть использованы проводники других форм и размеров. Кроме того, электроды могут быть расположены в конфигурациях, отличных от показанных прямоугольных наборов. Например, электроды могут быть расположены в круговых наборах для использования при детектировании угловых ускорений и смещений.
Очевидно, что для конфигураций датчиков, показанных на фиг. 3-5, чтобы получить абсолютную величину емкости, которая непосредственно определяет смещение, пределы перемещения контрольной массы будут ограничены таким образом, что пластины всегда будут сохранять некоторое перекрытие и в то же время никогда не будут перекрываться полностью. Этот фактор стремится ограничить динамический диапазон устройства. Альтернативно, если динамический диапазон устройства больше, чем шаг электродов (то есть контрольная масса может смещаться на большее расстояние, чем шаг электродов), то это приведет к периодическому выходному сигналу. То есть по мере смещения контрольной массы емкостной сигнал будет увеличиваться и уменьшаться, при этом электроды контрольной массы будут проходить над первым неподвижным электродом и проходить его, затем проходить над вторым неподвижным электродом и проходить его и т.д. Когда правило ограничения перемещения будет нарушено, емкость больше не будет изменяться линейно в диапазоне перемещения, а будет периодической и будет казаться синусоидальной. Было обнаружено, что характеристика (то есть чувствительность) улучшается при переходе на периодическую электродную конфигурацию. Однако эта система не имеет механизма определения абсолютного положения контрольной массы. В системах с периодическими датчиками для отслеживания абсолютного положения используются специальные электронные схемы счета количества циклов смещения электродов, но это увеличивает сложность и стоимость таких систем.
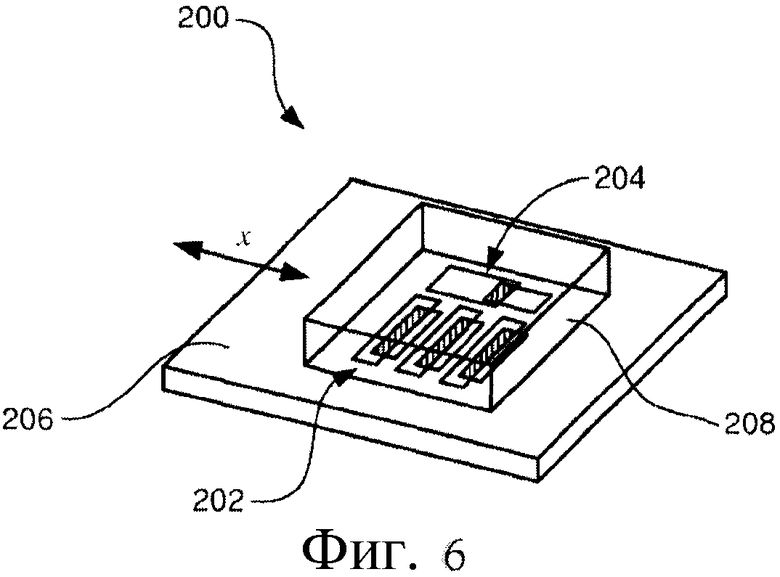
Авторы изобретения разработали имеющую преимущества конфигурацию емкостного инерциального датчика с двумя независимыми блоками электродов для измерения перемещения по одной оси. Один вариант исполнения такого датчика показан на фиг. 6. Этот датчик 200 включает в себя первый блок периодических электродов 202 с мелким шагом, которые соединены параллельно (как было описано ранее применительно к фиг. 3), и второй блок электродов 204, которые расположены смежно с периодическим блоком и имеют больший шаг, образуя абсолютный датчик с низкой чувствительностью. Каждый блок электродов включает в себя по меньшей мере один электрод на неподвижной подложке 206 и по меньшей мере один соответствующий электрод на контрольной массе 208. Электроды контрольной массы могут или находиться на одной и той же контрольной массе, или они могут находиться на соединенных частях одной и той же контрольной массы, перемещающихся в одном и том же направлении.
Поскольку пара 204 абсолютного датчика не нарушает правило перекрытия во всем диапазоне перемещения, то второй блок электродов обеспечивает указание абсолютного положения контрольной массы 208. Поскольку второй блок не имеет уровень разрешения блока периодических электродов, то абсолютный датчик не имеет достаточного разрешения, чтобы показать, в каком периоде находится периодический датчик. Таким образом, комбинация двух датчиков обеспечивает высококачественный инерциальный датчик с большим динамическим диапазоном.
Размер, форма и количество электродов как в первом, так и во втором блоке 202, 204 электродов может изменяться, а количество электродов на контрольной массе 208 может отличаться от количества электродов на неподвижной подложке 206. В конфигурации, показанной на фиг. 6, блок 202 периодических электродов включает в себя три пары электродов, а блок 204 электродов с большим шагом включает в себя только одну пару электродов. На фиг. 7 показан вид сверху другого варианта исполнения датчика 250, в котором блок 252 электродов с большим шагом включает в себя одну пару электродов, а блок 254 периодических электродов включает пять электродов 254а на контрольной массе и девять электродов 254b на неподвижной подложке.
На Фиг. 7 изображена также часть диапазона перемещения электродов контрольной массы относительно неподвижных электродов. Блок 252 абсолютного датчика сконфигурирован таким образом, что, по меньшей мере, некоторый участок электрода 252а контрольной массы в любое время перекрывает соответствующий неподвижный электрод 252b. Это позволяет этому блоку электродов обеспечивать показание абсолютного смещения. В одном максимальном пределе перемещения блока абсолютных электродов от исходного положения, показанном пунктирными линиями с позиции 256 и обозначенном величиной смещения +Х1, электрод 252а контрольной массы не перекрывает полностью соответствующий неподвижный электрод 252b. Поскольку и абсолютный, и периодический электроды 252а и 254а прикреплены к одной и той же контрольной массе, смещение каждого из них будет одинаковым. Таким образом, периодические электроды 254а также сместятся на ту же самую величину +Х1, когда абсолютный электрод 252а сделает то же самое, как показано пунктирными линиями 260. При другом пределе перемещения от исходного положения, соответствующем величине смещения -Х1 (то есть в противоположном направлении, чем +Х1), показанном пунктирными линиями 258, электрод контрольной массы все еще перекрывает на некоторую величину неподвижный электрод. И здесь снова периодические электроды будут смещаться в том же самом направлении на ту же самую величину (-Х1), как показано пунктирными линиями 262.
Желательно также, чтобы блоки периодических электродов следовали подобному же правилу, при котором во всем диапазоне перемещения контрольной массы ни один электрод(ы) контрольной массы не выходил полностью за диапазон перемещения блока неподвижных электродов. На фиг. 7 видно, что если бы один из пяти электродов 254а контрольной массы переместился за величину перекрытия с одним из соответствующих неподвижных электродов 254b, то величина амплитуды синусоидальной волны вследствие потери одного электрода уменьшилась бы. Это изменило бы емкостной сигнал и, таким образом, изменило бы измеренную величину смещения. Альтернативно система может быть сконфигурирована с возможностью разрешения одному или большему количеству электродов контрольной массы полностью выйти за диапазон неподвижных электродов. В таком случае система может быть запрограммирована на компенсацию изменения результирующей емкости на основе считывания показаний абсолютного датчика. Считается, что датчик, выполненный при такого рода подходе, теряет свою чувствительность пропорционально текущему количеству перекрытых электродов, деленному на изначальное общее количество перекрытых электродов.
На диаграмме фиг. 8 показан сравнительный выходной сигнал от блоков абсолютного и периодического датчиков. На этой диаграмме емкостной сигнал, показанный кривой 300, создаваемый блоком периодического датчика, представляет собой синусоидальную волну, причем емкость увеличивается и уменьшается в соответствии с тем, как периодические электроды контрольной массы проходят над одним, а затем над другим из неподвижных периодических электродов, а также над зазорами между неподвижными электродами. Было обнаружено, что хороший синусоидальный отклик от блока периодического датчика получается, когда отношение шага Р периодического набора электродов (показанного на фиг. 7) к величине зазора d (показанного на фиг. 1) между подвижными и неподвижными наборами электродов приблизительно равно 1,6 (то есть Р/d≈1,6). По мере увеличения отношения Р/d выше 1,6 будет увеличиваться гармоническая составляющая, поскольку изменение емкости будет все больше приближаться к треугольной волне. Тем не менее, этой дополнительной гармонической составляющей легко управлять. Вообще говоря, меньшая величина зазора d дает лучшую характеристику датчика. Минимальный зазор d может быть ограничен управлением зазора (какой может быть надежно получен минимальный зазор без интерференции) и литографическими ограничениями на ширину Р линии. При уменьшении отношения Р/d ниже 1,6 характеристика датчика будет ухудшаться в результате меньшего изменения емкости на единицу линейного смещения. Для периодического датчика Р может быть выбрано, исходя из минимального зазора d, который может быть изготовлен, если на него не повлияют литографические ограничения.
В то время как формируемый блоком периодического датчика емкостной сигнал представляет собой синусоидальную волну, блок абсолютных электродов создает по существу линейный емкостной сигнал, представленный по существу прямой линией 302, во всем диапазоне перемещения. Блок периодического датчика дает сигнал более высокой точности, поскольку изменение в зоне А перекрытия конденсатора на единицу линейного смещения х контрольной массы в этом случае больше, что обеспечивает высокую точность сигнала позиционирования. С другой стороны, блок абсолютных электродов обеспечивает показание абсолютного положения кривой периодической емкости, что позволяет правильно интерпретировать сигнал периодического электрода, хотя и с меньшей точностью, поскольку изменение А на единичное изменение х в данном случае меньше.
Из фиг. 8 видно, что чувствительность (наклон кривой емкости) набора периодического датчика не постоянен. Один из подходов к решению этого показан на фиг. 9. Добавлен второй набор 402 периодического электрода, в котором набор 402b неподвижного электрода сдвинут на четверть шага относительно первого набора 400b неподвижного электрода в направлении перемещения датчика. Два подвижных набора 400а и 402а должны быть взаимно согласованы по фазе в направлении перемещения на поверхности контрольной массы 404. Поперечное сечение, показанное на фиг. 10 иллюстрирует требуемое расположение между двумя наборами электродов. Показанная на фиг. 9 и 10 конфигурация множества периодических электродов образует блок кривых емкости, подобных показанным на фиг. 11. Первый блок периодических электродов образует кривую периодического изменения емкости, показанную на фиг. 11 сплошной линией 420. Второй блок периодических электродов образует кривую периодического изменения емкости, показанную на фиг. 11 пунктирной линией 422. Блок абсолютных электродов (408 на фиг. 9) образует по существу прямую линию 424, показанную сплошной линией. Периодические кривые 420 и 422 поворотно сдвинуты относительно одна другой на π/2 радиан (или на 90°), что соответствует соотношению между синусом и косинусом. Такая пара сигналов обычно комбинируется для получения выходного сигнала положения с равномерной чувствительностью, эквивалентной максимальной чувствительности только одного сигнала. Примерами таких интерполяционных схем являются общеизвестные оптические синусно-косинусные кодирующие устройства инкрементального типа. Такие схемы могут сохранять относительный цикл и вычисления подцикла. Однако для точного определения абсолютного положения должен быть задан начальный отсчет цикла. В раскрытом в настоящем описании датчике сигнал датчика, производимый абсолютным датчиком, то есть сигнал 424 на фиг. 11, может благоприятно обеспечить необходимое абсолютное вычисление цикла. Дополнительно к вышеописанным конфигурациям частота опроса в интерполяционных электронных компонентах должна быть достаточно большая, чтобы гарантировать, что полный цикл смещения не окажется между измерительными опросами. В настоящем изобретении, с другой стороны, это требование является не столь строгим для электронных компонентов датчика, которые комбинируют три сигнала 420, 422 и 424. В ряде задач, связанных с автодиагностикой и калибровкой, эти два блока датчиков могут быть использованы также по отдельности. Например, пластины конденсатора могут быть наклонены для создания силы, лежащей в плоскости для перемещения контрольной массы. При этом пользователь сможет активизировать один блок электродов и измерить выходной сигнал на втором. Комбинированием этих измерений с наклоном устройства вверх и измерением отклика на силу тяжести могут быть определены выравнивание, зазор и другие параметры датчика. Могут быть выполнены другие задачи самопроверки и калибровки.
Следует понимать, что в то время как вариант исполнения настоящего изобретения, показанный и описанный применительно к фиг. 9-11, описывает два блока периодических электродов, которые взаимно смещены на 90°, для данной оси движения может быть предусмотрено больше двух блоков периодических электродов, и они могут быть смещены на различные величины углов. Например, могут быть предусмотрены три блока периодических электродов, они могут быть смещены на 60° относительно друг друга.
Использование нескольких блоков электродов для одной оси перемещения может быть расширено на несколько осей, и эти блоки электродов могут использовать одну и ту же контрольную массу или интегральную пластину.
Один вариант исполнения емкостного датчика 500 с наборами множества электродов на одну ось для детектирования движения по двум взаимно-ортогональным осям (Х и Y) показан на фиг. 12. В этом варианте исполнения для детектирования движения контрольной массы в направлении х использован первый блок 502 абсолютных электродов и первый блок 504 периодических электродов. Предусмотрены также второй блок 506 абсолютных электродов и второй блок 508 периодических электродов, и они ориентированы перпендикулярно первым блокам электродов, для детектирования движения контрольной массы в направлении y.
В варианте исполнения, показанном на фиг. 12, неподвижные электроды для всех блоков электродов как периодических, так и абсолютных, имеют ширину w, которая выбрана таким образом, что никакая пара электродов не будет испытывать боковое смещение, которое изменяет соответствующие показания емкости. Например, первый блок 504 периодических электродов, который детектирует смещение вдоль оси х, имеет неподвижные электроды 510, которые достаточно широкие, что смещение соответствующих электродов 512 контрольной массы в направлении y не вызовет продолжение конца одного из соответствующих электродов контрольной массы после конца неподвижного электрода и тем самым изменение перекрытия. Таким образом, смещение в направлении y не будет влиять на считывание величины смещения в направлении х и наоборот.
В дополнение к ее применению в качестве акселерометра система этого типа может быть использована в других задачах, в которых необходима чувствительная способность периодических конденсаторных пластин. Например, такой тип емкостного датчика может быть использован для детектирования движения чувствительных осей в гироскопе. Такой тип устройства может быть также использован для устройства микропозиционирования в электронной микроскопии.
Таким образом, раскрытая здесь система обеспечивает инерционный датчик МЭМС-типа, имеющий два блока емкостных электродов, измеряющих смещение в одном и том же направлении с, по существу, различной чувствительностью. Один набор электродов представляет собой набор высокоточных периодических электродов, другой является менее точным абсолютным датчиком. Блок периодических электродов обеспечивает высокоточный относительный позиционный сигнал, а блок абсолютных электродов обеспечивает показание абсолютного положения на периодической кривой изменения емкости, дающий возможность правильной интерпретации сигнала периодических электродов. Датчики этого типа могут быть сконфигурированы с возможностью детектирования смещения в широком диапазоне. Например, авторы спроектировали датчики этого типа, которые могут измерять смещения величиной около 50 мкм (50×10-6 м) с разрешением, которое меньше чем 1 пм (1×10-12 м). Могут изготовляться блоки множества периодических и абсолютных электродов, и они могут конфигурироваться с возможностью детектирования смещения по нескольким осям. Установка на одной оси двух блоков электродов позволяет получить высокоточный инерционный датчик с большим динамическим диапазоном. При необходимости можно организовать работу периодического датчика по замкнутому контуру.
Этот тип системы емкостного датчика может быть изготовлен с использованием известных в своей области способов производства устройств МЭМС-типа. Конфигурация поверхностных электродов может быть реализована в процессе скрепления пластин, при котором электроды изготавливаются на поверхности двух пластин, а затем скрепляются вместе "лицом к лицу". Затем одна пластина подвергается травлению (до или после скрепления) для формирования подвижной структуры. Это устройство может быть также изготовлено с использованием поверхностной микрообработки.
Периодический электрод, объединенный с абсолютным датчиком, кроме того, дает возможность сделать более свободными допуски на выравнивание пластин. То есть исходное положение может быть определено абсолютным датчиком, в то время как периодический датчик сохраняет свою полную работоспособность независимо от абсолютного положения. Это может сделать производственный процесс потенциально более дешевым. Например, изготовление емкостного датчика этого типа обычно во время производства требует хорошего выравнивания элементов, при этом бывает трудно достичь постоянства. Раскрытая здесь система периодических электродов, преимущественно, обеспечивает большую степень рассогласования, лишь бы движущиеся части не вышли за предел перемещения относительно неподвижных электродов. Используя два блока смещенных электродов и абсолютный датчик (как показано на фиг. 9), эта система может обеспечить разрешение, которое по существу постоянно во всем диапазоне перемещения. В этой конфигурации исходное положение становится незначащим: не существует наилучшего относительного положения электродов. Таким образом, эта конфигурация во время производства может допускать большее рассогласование, которое не оказывает отрицательного влияния на работу датчика.
Следует понимать, что вышеприведенные схемы являются иллюстративными примерами использования раскрытых здесь принципов. Специалисту в данной области будет очевидно, что возможны их многочисленные модификации без отклонения от принципов и концепций данного описания в том виде, как они изложены в пунктах формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЕ, МЕХАНИЧЕСКИЕ, ВЫЧИСЛИТЕЛЬНЫЕ И/ИЛИ ДРУГИЕ УСТРОЙСТВА, СФОРМИРОВАННЫЕ ИЗ МАТЕРИАЛОВ С ЧРЕЗВЫЧАЙНО НИЗКИМ СОПРОТИВЛЕНИЕМ | 2012 |
|
RU2612847C2 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ДЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2580879C2 |
| Ёмкостный датчик деформации | 2020 |
|
RU2759175C1 |
| Ёмкостный датчик деформации | 2020 |
|
RU2759176C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАБОЧЕГО ДАВЛЕНИЯ С УЛУЧШЕННОЙ КОМПЕНСАЦИЕЙ ОШИБОК | 2000 |
|
RU2243518C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2025 |
|
RU2840118C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ ДЛЯ ЕМКОСТНОГО ДАТЧИКА | 2019 |
|
RU2724299C1 |
| МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТРИЧЕСКИЙ ДАТЧИК С ОБУСЛОВЛЕННЫМ ОБНАРУЖЕНИЕМ ЕМКОСТЕЙ | 2020 |
|
RU2815008C1 |
| Способ измерения деформаций растяжение-сжатие | 2020 |
|
RU2753747C1 |
| СИСТЕМА И СПОСОБ ГЕНЕРАЦИИ ЭНЕРГИИ | 2016 |
|
RU2718672C2 |

Настоящее изобретение относится к электронным измерительным устройствам и, в частности, к емкостному датчику, способу детектирования и способу изготовления такого датчика. Техническим результатом является повышение чувствительности датчика, обеспечение детектирования в двух направлениях и обеспечение широкого динамического диапазона измерений. Технический результат достигается тем, что емкостной датчик включает в себя два набора электродов переменного конденсатора, расположенные соответствующим образом на плоской опорной поверхности, и контрольную массу, которая имеет возможность эластичного смещения вдоль первой оси, по существу параллельной плоской опорной поверхности. Первый набор электродов формирует высокоточное периодическое изменение емкости в диапазоне смещения контрольной массы вдоль оси, а второй набор электродов обеспечивает показание абсолютного положения на периодической кривой изменения емкости в диапазоне смещения вдоль оси. 3 н. и 17 з.п. ф-лы, 12 ил.
1. Датчик для измерения ускорения и/или перемещения, содержащий первый и второй блоки электродов переменного конденсатора, расположенные соответствующим образом на плоской опорной поверхности, и контрольную массу, эластично смещаемую вдоль первой оси, по существу параллельно плоской опорной поверхности; причем
первый блок электродов, формирующий абсолютное изменение емкости в диапазоне смещения контрольной массы вдоль первой оси, второй блок электродов, формирующий периодическое изменение емкости в диапазоне смещения вдоль первой оси.
2. Датчик по п.1, в котором второй блок электродов содержит по меньшей мере две пары удлиненных электродов, ориентированных перпендикулярно первой оси и имеющих шаг электродов, причем диапазон смещения больше, чем этот шаг.
3. Датчик по п.1, в котором первый блок электродов содержит одну пару электродов, включающих в себя неподвижный электрод и электрод контрольной массы, причем электрод контрольной массы ориентирован таким образом, чтобы всегда частично перекрывать неподвижный электрод во всем диапазоне смещения.
4. Датчик по п.1, дополнительно содержащий третий блок электродов переменного конденсатора, расположенный на опорной поверхности и на контрольной массе, соответственно, который формирует периодическое изменение емкости в диапазоне смещения контрольной массы вдоль первой оси.
5. Датчик по п.4, в котором второй и третий блоки электродов переменного конденсатора имеют электроды, которые смещены относительно друг друга.
6. Датчик по п.5, в котором второй и третий блоки электродов переменного конденсатора имеют электроды, которые расположены таким образом, чтобы обеспечивать выходные сигналы, смещенные относительно друг друга примерно на 90°.
7. Датчик по п.1, в котором чувствительность второго блока электродов по существу больше, чем чувствительность первого блока электродов.
8. Датчик по п.1, дополнительно содержащий
третий и четвертый блоки электродов переменного конденсатора, расположенные на опорной поверхности и контрольной массе, соответственно, причем контрольная масса является эластично смещаемой вдоль второй оси, которая по существу ортогональна первой оси и параллельна опорной поверхности; причем
третий блок электродов, формирующий переменное изменение емкости в диапазоне смещения контрольной массы вдоль второй оси; четвертый блок электродов, формирующий абсолютное изменение емкости в диапазоне смещения вдоль второй оси.
9. Датчик по п.8, в котором каждый из блоков электродов включает в себя неподвижные электроды, закрепленные на опорной поверхности, имеющие ширины, выбранные таким образом, чтобы по существу не допускать изменение емкости из-за смещения внутри диапазона смещения вдоль оси, которая ортогональна соответствующей оси чувствительности.
10. Датчик по п.8, в котором второй и третий блоки электродов переменного конденсатора содержат вторичные блоки электродов, которые позиционно смещены друг от друга на расстояние, достаточное для создания емкостных сигналов, которые осесимметрично смещены относительно друг друга на 90°.
11. Датчик по п.1, в котором диапазон смещения составляет менее чем около 50 мкм.
12. Способ детектирования ускорения и/или перемещения, содержащий этапы, на которых:
смещают контрольную массу вдоль первой оси, по существу параллельной плоской опорной поверхности;
получают первое переменное значение емкости от первого набора электродов переменного конденсатора, содержащего множество электродов конденсатора, расположенных на опорной поверхности и контрольной массе, соответственно,
получают второе абсолютное значение емкости от второго переменного конденсатора, содержащего электрод конденсатора, расположенный на опорной поверхности и контрольной массе; и
определяют величину смещения на основе первого и второго значений емкости.
13. Способ по п.12, дополнительно содержащий этапы, на которых: получают третье переменное значение емкости от третьего набора электродов переменного конденсатора, содержащего множество электродов конденсатора, расположенных на опорной поверхности и на контрольной массе, соответственно, и
определяют величину смещения на основе первого, второго и третьего значений емкости.
14. Способ по п.13, в котором третье переменное значение емкости смещено на около 90° относительно первого переменного значения емкости.
15. Способ по п.12, дополнительно содержащий этапы, на которых: смещают контрольную массу вдоль второй оси, по существу, ортогональной первый оси и, по существу, параллельной плоской опорной поверхности; получают третье переменное значение емкости от третьего набора электродов переменного конденсатора, содержащего множество электродов конденсатора, расположенных на опорной поверхности и контрольной массе, соответственно, и ориентированных, по существу, перпендикулярно первому набору переменного конденсатора;
получают четвертое абсолютное значение емкости от четвертого переменного конденсатора, содержащего электрод конденсатора, расположенный на опорной поверхности и контрольной массе и ориентированный по существу перпендикулярно второму набору переменного конденсатора; определяют величину смещения вдоль первой и второй осей на основе первого, второго, третьего и четвертого значений емкости.
16. Способ изготовления датчика для измерения ускорения и/или перемещения, содержащий этапы, на которых:
обеспечивают опорную поверхность;
обеспечивают контрольную массу, эластично смещаемую вдоль первой оси, по существу параллельной опорной поверхности;
обеспечивают первый набор электродов периодического переменного конденсатора на опорной поверхности и контрольной массе; обеспечивают второй набор электродов периодического переменного конденсатора на опорной поверхности и контрольной массе, при этом второй набор электродов формирует абсолютное изменение емкости в диапазоне смещения контрольной массы.
17. Способ по п.16, дополнительно содержащий этап, на котором обеспечивают третий набор электродов периодического переменного конденсатора на опорной поверхности и контрольной массе, при этом третий набор электродов формирует периодическое изменение емкости, которое смещено относительно периодического изменения, производимого первым набором.
18. Способ по п.17, в котором на этапе обеспечения третьего набора электродов периодического переменного конденсатора обеспечивают последовательности электродов, которые производят изменение емкости, которое смещено на около 90° относительно периодического изменения, производимого первым набором.
19. Способ по п.16, в котором на этапе обеспечения первого набора электродов периодического переменного конденсатора изготавливают на опорной поверхности и контрольной массе, по меньшей мере, две пары удлиненных электродов, ориентированных по существу перпендикулярно первой оси и имеющих зазор, который меньше, чем диапазон смещения, и на этапе обеспечения второго набора электродов периодического переменного конденсатора изготавливают на опорной поверхности и контрольной массе одну пару электродов, ориентированную таким образом, чтобы всегда частично перекрываться в диапазоне смещения.
20. Способ по п.16, в котором контрольная масса является эластично смещаемой вдоль второй оси, которая ортогональна первой оси, и который дополнительно содержит этапы, на которых:
обеспечивают третий и четвертый блоки электродов переменного конденсатора на опорной поверхности и контрольной массе соответственно; при этом третий блок электродов формирует переменное изменение емкости в диапазоне смещения контрольной массы вдоль второй оси; а четвертый блок электродов формирует абсолютное изменение емкости в диапазоне смещения вдоль второй оси.
| Журнал «Компоненты и технологии», №3 2006 | |||
| Индуктивно-емкостный преобразователь перемещения | 1984 |
|
SU1226014A1 |
| US 5834646 А1, 10.11 | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| US 6293150 B1, 25.09 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| JP 0001424561 A3, 02.06.2004 | |||
| US 4945773, 04.08.1990. | |||

