Настоящее изобретение относится к маятниковому акселерометрическому датчику с замкнутым контуром, с электростатическим управлением и обнаружением, используемому для обнаружения физических величин, и способу управления таким датчиком. Например, датчик представляет собой технологический датчик МЭМС (микроэлектромеханическая система).
Электростатический маятниковый акселерометр содержит корпус и сейсмическую массу, соединенную с корпусом посредством одного или нескольких шарниров, расположенных так, что сейсмическая масса образует маятник, подвижный относительно корпуса, либо перемещающийся поступательно, либо поворотный. Перемещения сейсмической массы под действием ускорения обычно обнаруживают с помощью трех электродов.
Первый неподвижный электрод и второй неподвижный электрод выполнены за одно целое с корпусом и соединены со схемой возбуждения.
Третий электрод, который является подвижным, переносится маятником и соединен со схемой обнаружения.
Каждый неподвижный электрод вместе с подвижным электродом образует емкость, значение которой зависит от их разнесения. В отсутствие дефекта изготовления и в случае, когда датчик не подвергается воздействию ускорения вдоль оси чувствительности, маятник сохраняется в нейтральном положении, при этом две емкости равны. С другой стороны, когда маятник подвергается воздействию ускорения вдоль оси чувствительности, он перемещается, вызывая являющееся логическим следствием понижение емкости, образуемой подвижным электродом и одним из неподвижных электродов, и повышение емкости, образуемой подвижным электродом и другим неподвижным электродом.
Кроме того, это изменение емкости зависит от деформаций корпуса и маятника.
При работе с замкнутым контуром положение маятника является сервоуправляемым в нейтральном положении или целевом положении на полпути между неподвижными электродами благодаря приложению к маятнику электростатической силы, которая должна компенсировать ускорение, прикладываемое вдоль оси чувствительности. Электростатическая сила является результатом действия напряжений, подаваемых на электроды для поддержания нулевой разности емкостей.
Датчик содержит схему возбуждения для каждого неподвижного электрода, выполненную с возможностью снабжения энергией электродов для формирования электростатической силы.
Квадратичный характер электростатической силы относительно прилагаемых напряжений усложняет конструкцию схемы управления, выполняющей сервоуправление маятником и оценивание ускорения.
Известно управление маятником полностью или никак с использованием калиброванных импульсов напряжения, позволяющее избежать этой трудности.
Эти импульсы подаются на один из электродов в зависимости от необходимости вытягивания или проталкивания маятника для приведения его обратно в его целевое положение. В таком случае плотность импульсов, предназначенных для проталкивания маятника и соответственно для вытягивания его, то есть число импульсов в расчете на временной интервал, является линейной функцией измеряемого ускорения.
Таким образом, в среднем нулевое ускорение компенсируется равным числом импульсов в обоих направлениях.
Однако симметрия импульсов, подаваемых на два электрода, может быть несовершенной вследствие разности между длительностью импульсов, подаваемых на первый неподвижный электрод, и длительностью импульсов, подаваемых на второй неподвижный электрод.
В этом случае плотность импульсов изменяют с помощью сервоуправления для сохранения маятника в целевом положении, что смещает оценку ускорения.
Чтобы улучшить характеристику для датчика этого вида, в документе WO 2014/128027 предложено использовать общую схему возбуждения, при этом ограничиваются проблемы, связанные с асимметрией изготовления и старением электроники схемы возбуждения.
Кроме того, в документе WO 2017/85142 предложено реализовать фазу точного управления, чтобы направлять импульсы управления средней величины, позволяющие получать оптимальную характеристику в пределах уменьшенного диапазона измерений и фазу расширенного управления процессом, при котором импульсы управления с большой амплитудой направляются для расширения диапазона измерений, для смещения датчика во всем диапазоне, возможно, с ухудшенной характеристикой.
Несмотря на преимущества во многих отношениях, упомянутые выше датчики имеют относительно высокое энергопотребление.
С учетом изложенного выше задача изобретения заключается в создании электростатического маятникового акселерометрического датчика, имеющего пониженное электропотребление при сохранении улучшенной характеристики.
Кроме того, согласно другой задаче изобретения предложен датчик, имеющий простую конструкцию при реализации.
Поэтому согласно изобретению предложен акселерометрический датчик, содержащий корпус, маятник, прикрепленный к корпусу, подвижный электрод, переносимый маятником и соединенный со схемой обнаружения, неподвижные первый электрод и второй электрод, выполненные за одно целое с корпусом, для образования вместе с подвижным электродом двух конденсаторов переменной емкости, зависящей от расстояния между электродами, и блок управления, выполненный с возможностью осуществления операций обнаружения, чтобы измерять переменные емкости конденсаторов, и операции управления подвижным электродом в зависимости от емкостей, измеряемых при подаче логического сигнала, для управления переключателем для избирательного соединения неподвижных электродов со схемой возбуждения, подводящей сигнал управления к неподвижным электродам для удержания маятника в заданном положении.
Блок управления выполнен с возможностью подачи в течение каждого периода калибровки первого сигнала обнаружения на один из упомянутых неподвижных электродов, выбираемый в соответствии с логическим уровнем сигнала управления, и второго сигнала обнаружения на другой неподвижный электрод, при этом сигнал управления подается на электрод, на который подается второй сигнал обнаружения.
Таким образом, снижение энергопотребления датчиком и улучшение характеристики достигаются благодаря уменьшению числа переключений переключателя за счет подачи двух сигналов обнаружения и сигнала управления.
Согласно другой особенности первый и второй сигналы обнаружения представляют собой сигналы в виде импульсов.
Согласно еще одной особенности переключатель содержит первую входную клемму под опорным потенциалом, обеспечиваемым схемой возбуждения, и вторую входную клемму под нулевым потенциалом для избирательного подключения упомянутых неподвижных электродов к схеме возбуждения или к нулевому потенциалу.
В одном варианте осуществления схема возбуждения содержит цифро-аналоговый преобразователь, соединенный с переключателем и управляемый блоком управления.
Схема обнаружения может включать в себя усилительный каскад, имеющий вход, соединенный с подвижным электродом, и выход, соединенный с аналого-цифровым преобразователем, имеющим выход, соединенный с блоком управления.
Например, блок управления включает в себя первый блок оценивания положения маятника, вход которого соединен с выходом схемы обнаружения и выход соединен с отрицательным входом компаратора, имеющего выход, соединенный со входом корректора, имеющего выход, соединенный с блоком задания последовательности и с вторым блоком оценивания, имеющим первый выход, соединенный с положительным входом компаратора, и второй выход, предоставляющий оценку ускорения.
В одном варианте осуществления блок управления выполнен с возможностью подачи второго сигнала обнаружения и сигнала управления посредством общего импульса обнаружения и управления.
Кроме того, объектом изобретения является способ управления акселерометрическим датчиком, определенным выше, содержащий этапы:
- обнаружения переменных емкостей конденсаторов путем подачи в течение каждого периода калибровки первого сигнала обнаружения на один из неподвижных электродов, выбираемый в соответствии с логическим уровнем сигнала управления, и второго сигнала обнаружения на другой неподвижный электрод;
- управления подвижным электродом в зависимости от емкостей, измеряемых при подаче логического сигнала, для управления переключателем для избирательного соединения неподвижных электродов со схемой возбуждения, подводящей сигнал управления, с тем, чтобы подать управляющий сигнал к электроду, на который подают второй сигнал обнаружения.
Согласно этому способу второй сигнал обнаружения и сигнал управления предпочтительно подавать посредством общего импульса обнаружения и управления.
Другие задачи, признаки и преимущества изобретения станут понятными при чтении нижеследующего описания, излагаемого только в качестве не создающего ограничения примера и с обращением к сопровождающим чертежам, на которых:
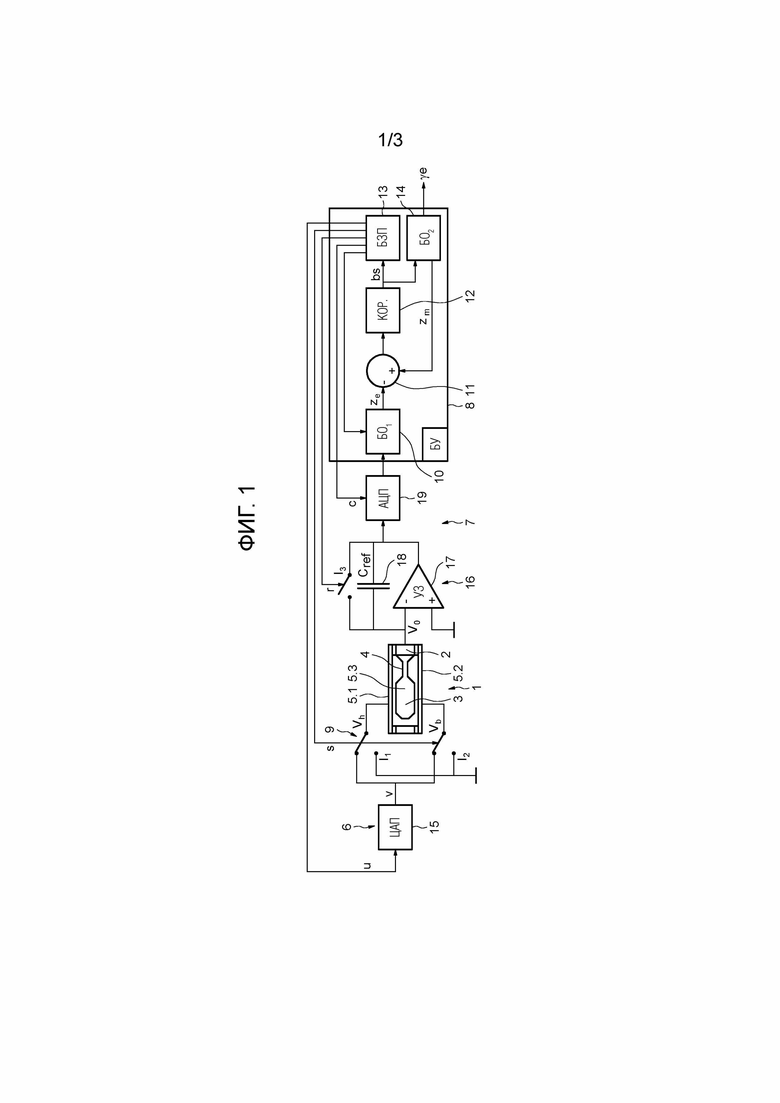
фиг. 1 - схематичный вид датчика согласно одному варианту осуществления изобретения;
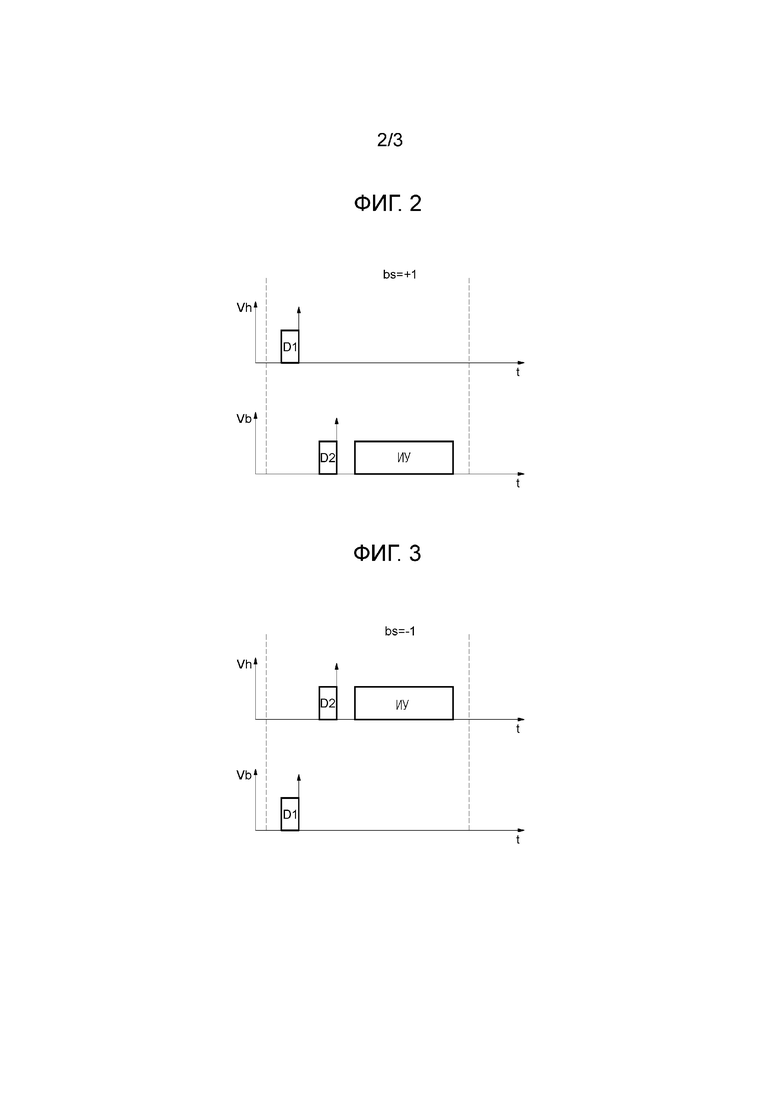
фиг. 2, фиг. 3 - временные диаграммы, показывающие подачу первого и второго сигналов обнаружения и сигнала управления на неподвижные электроды согласно логическому уровню сигнала управления; и
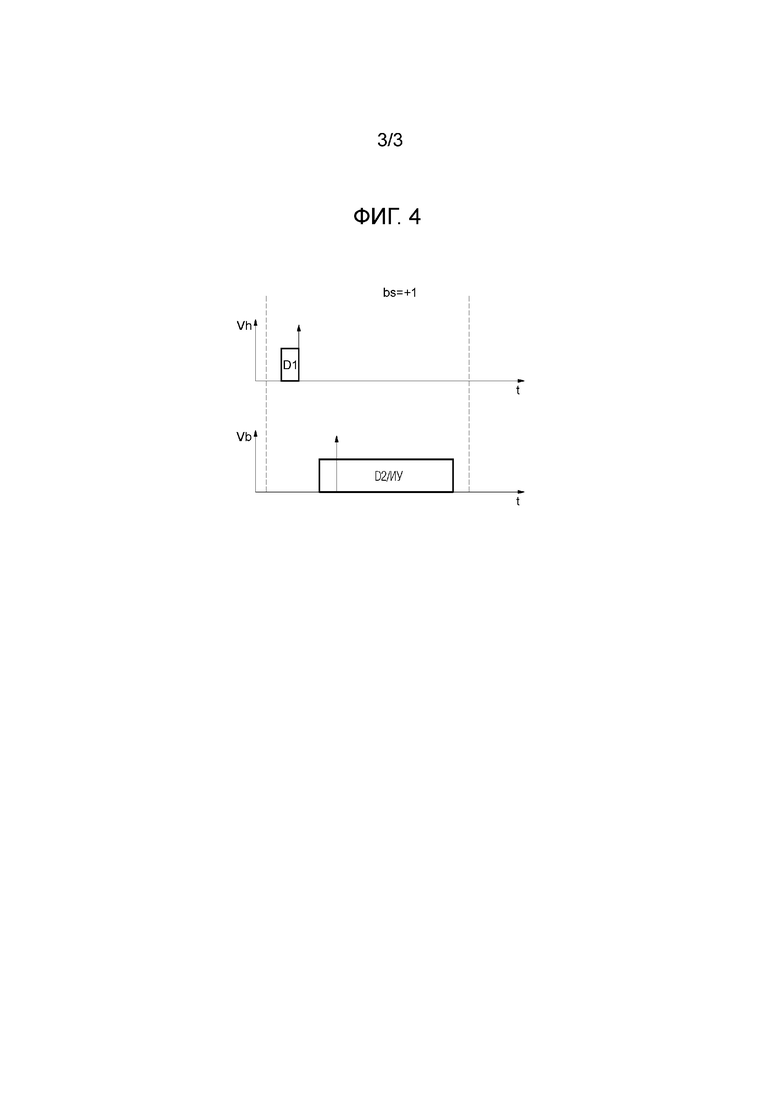
фиг. 4 - временная диаграмма, иллюстрирующая еще один вариант осуществления изобретения, в соответствии с которым сигнал обнаружения, подаваемый на управляемый электрод, и сигнал управления подаются в виде общего импульса обнаружения и управления.
На фиг. 1 показан акселерометрический датчик согласно изобретению, обозначенный в целом позицией 1.
В данном случае акселерометрический датчик представляет собой микроэлектромеханическую систему, также называемую МЭМС, полученную травлением пластины из кристаллического или полукристаллического материала, такого как кремний.
Датчик содержит корпус 2, к которому шарнирно присоединено твердое тело 3 посредством шарнира 4, расположенного таким образом, что твердое тело 3 образует подвижный маятник, осуществляющий поворот относительно корпуса 2.
Датчик 1 содержит первый неподвижный электрод 5.1 и второй неподвижный электрод 5.2, которые выполнены за одно целое с корпусом и которые соединены со схемой возбуждения, обозначенной позицией 6, и третий электрод 5.3, переносимый твердым телом 3, соединенный со схемой 7 обнаружения. Блок 8 управления (БУ) соединен со схемой 6 возбуждения и со схемой 7 обнаружения.
Схема 6 возбуждения включает в себя выход, соединенный с переключателем 9 на два положения, соединенным с первым электродом 5.1 и со вторым электродом 5.2 для избирательного подключения их к схеме 6 возбуждения.
Более конкретно, переключатель 9 содержит переключатель I1, выполненный с возможностью соединения первого электрода 5.1 либо с выходом схемы 6 возбуждения, либо с заземлением, и переключатель I2, выполненный с возможностью соединения второго электрода 5.2 либо с выходом схемы 6 возбуждения, либо с заземлением.
Переключатель 9 управляется блоком 8 управления.
Блок 8 управления содержит первый блок 10 оценивания (БО1), вход которого соединен со схемой 7 обнаружения и выход соединен с отрицательным входом компаратора 11, имеющего выход, соединенный со входом корректора (Кор.) 12, выход которого соединен с блоком 13 задания последовательности (БЗП).
Кроме того, блок 8 управления содержит второй блок 14 оценивания (БО2), имеющий вход, соединенный с выходом корректора 12, выход, соединенный с дополнительным входом компаратора 11, и выход, предоставляющий оценку ускорения γе.
Кроме того, схема 6 возбуждения содержит цифро-аналоговый преобразователь (ЦАП) 15, соединенный с переключателем 9 и управляемый блоком 8 управления.
Схема 7 обнаружения содержит основной усилительный каскад 16, включающий усилитель 17 заряда (УЗ), снабженный в цепи обратной связи конденсатором 18 емкостью Cref и переключателем I3.
Усилительный каскад имеет вход, соединенный с подвижным электродом 5.3, и выход, соединенный со входом аналого-цифрового преобразователя (АЦП) 19, имеющего выход, соединенный с первым блоком 10 оценивания блока управления.
Этот датчик работает следующим образом.
Блок 8 управления осуществляет управление работой датчика и, в частности, хронологией различных операций, калибруемых на частоте FS. Блок 13 задания последовательности устанавливает порядок следования операций в течение периодов Ts калибровки путем последовательного и циклического регулирования цифро-аналогового преобразователя 15 посредством сигнала u управления, аналоговых переключателей I1, I2 посредством сигнала s управления, аналого-цифрового преобразователя 19 посредством сигнала c управления и аналогового переключателя I3 посредством сигнала r управления.
В соответствии с логическим состоянием сигнала s управления один из электродов 5.1, 5.2 подключается к выходу V цифро-аналогового преобразователя 15, тогда как другой из электродов 5.2, 5.1 одновременно подключается к заземлению. Поэтому электрод, соединенный с выходом преобразователя, находится под опорным потенциалом, обеспечиваемым схемой 6 возбуждения.
Акселерометрический датчик управляется блоком управления так, что в течение каждого периода TS калибровки реализуется фаза обнаружения переменных емкостей Ch и Cb, образованных между первым неподвижным электродом 5.1 и подвижным электродом 5.3 и между вторым неподвижным электродом 5.2 и подвижным электродом 5.3, соответственно, и фаза управления, на которой сигнал возбуждения подается на один из неподвижных электродов, с тем, чтобы возвратить маятник в его целевое положение благодаря электростатической силе, прикладываемой к пластинам конденсатора, неподвижный электрод которого выбирается сигналом s управления. В конце фазы обнаружения корректор 10 определяет знак логического сигнала bs управления, чтобы определить, к которому из неподвижного электрода 5.1 или неподвижного электрода 5.2 должен быть приложен сигнал u управления.
Если bs=+1, напряжение прикладывается к электроду 5.2, который в таком случае притягивает маятник к себе.
Если bs=-1, напряжение прикладывается к электроду 5.1, который в таком случае притягивает маятник к себе.
Обнаружение емкостей выполняется при определенных условиях в соответствии со знаком сигнала bs управления, при этом хронологический порядок обнаружений определяется знаком bs.
Линеаризованные выражения емкостей первого неподвижного электрода, называемого «верхним» неподвижным электродом Ch, и второго неподвижного электрода, называемого «нижним» неподвижным электродом Ch, даются следующими соотношениями:
 ,
,  (уравнение 1)
(уравнение 1)
 . (уравнение 2)
. (уравнение 2)
И относительное положение маятника задается соотношением:
 , (уравнение 3)
, (уравнение 3)
где C0 обозначает начальную емкость, C1 обозначает активную емкость, z представляет собой положение маятника, e представляет собой ширину воздушного промежутка, иначе говоря, расстояние между электродами 5.1 и 5.3 или между электродами 5.2 и 5.3, и эти расстояния равны в состоянии покоя, Vref представляет собой опорное напряжение, подводимое цифро-аналоговым преобразователем 15 и прикладываемое к электродам, и Qb и Qh представляют собой заряды, передаваемые к схеме 7 обнаружения, которые соответствуют изменениям зарядов на клеммах переменных конденсаторов, подвергающихся воздействию напряжения, возрастающего в пределах от 0 до Vref.
Таким образом, в течение фазы обнаружения для каждого периода калибровки выполняются два отсчета емкостей для оценивания положения маятника и осуществляется снабжение электроэнергией корректора.
В течение периода калибровки положение маятника между двумя измерениями изменяется незначительно.
Обнаружение переменных емкостей представляет собой обусловленное обнаружение, при этом порядок обнаружения емкостей обуславливается знаком логического сигнала bs управления, приходящего от корректора 12. Поэтому осуществляется псевдослучайная перестановка порядка обнаружения, при этом перестановка является псевдослучайной вследствие свойств сигнала bs управления в контуре типа сигма-дельта, и эти свойства представляют собой свойства белого шума, отфильтрованного с помощью пропускающей высокие частоты передаточной функции, определяемой, в частности, корректором 12.
Первое обнаружение осуществляется на неуправляемом электроде, а второе выполняется на электроде, который предполагается управляемым, при этом логический сигнал управления является доступным с момента начала периода реального времени, поскольку его вычисление начинается как только обнаружения, выполненные в течение предшествующего периода калибровки, становятся доступными.
Что касается фиг. 2, то на ней для примера применительно к случаю bs=+1 показано первое обнаружение D1, выполненное на верхнем электроде 5.1 при приложении импульса считывания, кроме того, показано второе обнаружение D2, выполненное на нижнем электроде при приложении второго измерительного импульса.
Затем при управлении переключателем 9 импульс управления (ИУ) подается на нижний электрод.
Что касается фиг. 3, то в случае, когда bs=-1, порядок обнаружения импульсов изменяется на обратный.
Это обусловленное обнаружение позволяет ограничивать количество переключений переключателя 9 и, следовательно, уменьшать энергопотребление, при этом сигнал управления подается непосредственно на электрод, подлежащий управлению. Фактически, больше нет необходимости в приведении в действие переключателя 9, который остается в одном и том же состоянии между этапом обнаружения D2 и этапом управления.
Следует также отметить, что порядок обнаружений изменяется на высокой частоте. Поэтому смещения электронного происхождения, создаваемые импульсами управления, преобразуются в шум вследствие псевдослучайного характера сигналов управления.
Фактически, любое смещение обнаружения создает шум со спектральной формой, идентичной спектральной форме импульсного сигнала bs управления. Благодаря обусловленному обнаружению смещения значительно уменьшаются, будучи умноженными на среднее значение сигнала bs управления, при этом остаются только шумы, для которых допуски возрастают.
Таким образом, обусловленное обнаружение становится псевдослучайным как в случае приложения паразитной силы, так и в случае измерения положения.
Кроме того, в то время, как в предшествующем уровне техники импульсы были периодическими и спектр их состоял из линий, перестановка позволяет получать эффект спектрального расхождения, что позволяет ограничивать возбуждение высокочастотных паразитных мод и прежде всего регулировать это возбуждение путем управления, и оно становится постоянным и медленно изменяющимся или, иначе говоря, менее сингулярным по частоте.
Кроме того, что касается фиг. 4, то в соответствии с другим аспектом второй импульс обнаружения емкости и импульс управления (ИУ) образуют общий импульс обнаружения и управления.
Иначе говоря, нарастающий фронт сигнала управления сдвигается до совпадения со спадающим фронтом второго сигнала обнаружения.
Это осуществление позволяет выполнять обнаружение емкостей и управление с помощью одного и того же импульсного сигнала.
Электростатическая сила, прикладываемая к маятнику, направление которой определяется сигналом bs управления, обусловлена разностью между силами, вызываемыми импульсом обнаружения и управления и первым сигналом обнаружения, подаваемым на другой электрод.
Обнаружение осуществляется с помощью несущей сигнала обнаружения и управления, тогда как управление осуществляется в основной полосе.
Кроме того, теоретически это осуществление позволяет снижать потребление энергии на одну треть благодаря уменьшению числа переключений переключателя 9.
Аналогично этому достигается снижение на одну треть систематической погрешности смещения, обусловленной волновыми формами, которая зависит от количества импульсов в течение периода калибровки.
Наконец, погрешность, обусловленная масштабным коэффициентом, полностью исключается.
Фактически, ускорение, эквивалентное приложенной силе, можно записать как
 , (уравнение 4)
, (уравнение 4)
где C1 - активная емкость, e - ширина воздушного промежутка, m - масса маятника, а  и
и  - средние квадраты напряжений, прикладываемых к верхнему и нижнему электродам в течение каждого периода калибровки.
- средние квадраты напряжений, прикладываемых к верхнему и нижнему электродам в течение каждого периода калибровки.
В осуществлении с тремя импульсами обнаружения и управления прикладываемую силу можно записать как
 , (уравнение 5)
, (уравнение 5)
где  соответствует смещению и
соответствует смещению и  соответствует масштабному коэффициенту.
соответствует масштабному коэффициенту.
При реализации первого импульса обнаружения и второго импульса обнаружения и управления прикладываемую силу можно записать как
 (уравнение 6)
(уравнение 6)
В предположении, что постоянные времени являются небольшими по сравнению с длительностью импульсов, любая погрешность  волновой формы будет оказывать одинаковое воздействие на импульс обнаружения или импульс управления, накладываясь на теоретический средний квадрат.
волновой формы будет оказывать одинаковое воздействие на импульс обнаружения или импульс управления, накладываясь на теоретический средний квадрат.
При обозначении асимметричной части этого дефекта как εt будем иметь:
 , (уравнение 7а)
, (уравнение 7а)
 , (уравнение 7b)
, (уравнение 7b)
 , (уравнение 7с)
, (уравнение 7с)
 . (уравнение 7d)
. (уравнение 7d)
При реализации с тремя импульсами получим:
 , (уравнение 8)
, (уравнение 8)
где  соответствует смещению и
соответствует смещению и  соответствует масштабному коэффициенту.
соответствует масштабному коэффициенту.
В случае реализации с двумя импульсами имеем:
 , (уравнение 9)
, (уравнение 9)
где  соответствует смещению и
соответствует смещению и  соответствует масштабному коэффициенту.
соответствует масштабному коэффициенту.
Из изложенного видно, что погрешность, обусловленная импульсом управления, компенсируется погрешностью, обусловленной импульсом обнаружения.
Погрешность масштабного коэффициента, которая может быть значительной при определенных рабочих температурах и в течение старения датчика, исключается и больше не должна учитываться в течение этапов предварительной калибровки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК С ЭЛЕКТРОСТАТИЧЕСКИМ МАЯТНИКОВЫМ АКСЕЛЕРОМЕТРОМ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ДАТЧИКОМ | 2014 |
|
RU2647983C2 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР, ИМЕЮЩИЙ ДВА ДИАПАЗОНА ИЗМЕРЕНИЯ | 2016 |
|
RU2697011C1 |
| Устройство регистрации временных характеристик коммутационного аппарата | 1986 |
|
SU1416944A1 |
| Устройство для снятия диаграммы направленности антенны | 1984 |
|
SU1334097A1 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ СТАНЦИЙ БЕЗОБМОТОЧНОГО РАЗМАГНИЧИВАНИЯ КОРАБЛЕЙ | 2017 |
|
RU2669761C1 |
| АНАЛИЗАТОР СПЕКТРА | 1989 |
|
RU2007692C1 |
| Обнаружитель сигналов управления беспилотного летательного аппарата с акустическим каналом пеленгования | 2024 |
|
RU2836857C1 |
| Способ и устройство автоматизированного структурирования мультикультурных учебных групп | 2016 |
|
RU2618387C1 |
| Переключатель | 1982 |
|
SU1081792A1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ИМПУЛЬСНОГО УСИЛИТЕЛЯ МОЩНОСТИ | 2021 |
|
RU2767315C1 |
Группа изобретений относится к маятниковому акселерометрическому датчику с замкнутым контуром. Блок управления акселерометрического датчика выполнен с возможностью подачи в течение каждого периода калибровки первого сигнала обнаружения на один из упомянутых неподвижных электродов, выбираемый в соответствии с логическим уровнем сигнала управления, и второго сигнала обнаружения на другой неподвижный электрод, при этом сигнал (u) управления подается на электрод, на который подается второй сигнал обнаружения. Технический результат – снижение энергопотребления датчиком, исключение погрешности масштабного коэффициента. 2 н. и 7 з.п. ф-лы, 4 ил.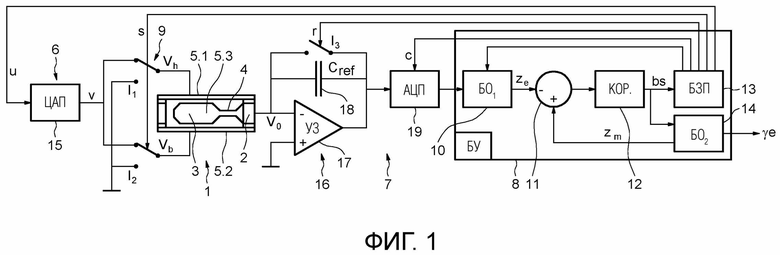
1. Акселерометрический датчик, содержащий корпус (2), маятник (3), прикрепленный к корпусу, подвижный электрод (5.3), переносимый маятником и соединенный со схемой (7) обнаружения, неподвижные первый электрод (5.1) и второй электрод (5.2), выполненные за одно целое с корпусом, для образования вместе с подвижным электродом двух конденсаторов переменной емкости, зависящей от расстояния между электродами, и блок (8) управления, выполненный с возможностью осуществления операций обнаружения, чтобы измерять переменные емкости конденсаторов, и операции управления подвижным электродом в зависимости от емкостей, измеряемых при подаче логического сигнала (bs), для управления переключателем (9) для избирательного соединения неподвижных электродов со схемой (6) возбуждения, подводящей сигнал (u) управления к неподвижным электродам для удержания маятника в заданном положении, отличающийся тем, что блок управления выполнен с возможностью подачи в течение каждого периода калибровки первого сигнала обнаружения на один из упомянутых неподвижных электродов, выбираемый в соответствии с логическим уровнем сигнала управления, и второго сигнала обнаружения на другой неподвижный электрод, при этом сигнал (u) управления подается на электрод, на который подается второй сигнал обнаружения.
2. Датчик по п. 1, в котором первый и второй сигналы обнаружения представляют собой сигналы в виде прямоугольных импульсов.
3. Датчик по одному из пп. 1, 2, в котором переключатель (9) содержит первую входную клемму под опорным потенциалом, обеспечиваемым схемой (6) возбуждения, и вторую входную клемму под нулевым потенциалом для избирательного подключения упомянутых электродов к схеме возбуждения или к нулевому потенциалу.
4. Датчик по любому одному из пп. 1-3, в котором схема (6) возбуждения содержит цифро-аналоговый преобразователь, соединенный с переключателем (9) и управляемый блоком (8) управления.
5. Датчик по любому одному из пп. 1-4, в котором схема (7) обнаружения включает в себя усилительный каскад, имеющий вход, соединенный с подвижным электродом (5.3), и выход, соединенный с цифро-аналоговым преобразователем, имеющим выход, соединенный с блоком управления.
6. Датчик по любому одному из пп. 1-5, в котором блок (8) управления включает в себя первый блок (10) оценивания положения маятника, вход которого соединен с выходом схемы обнаружения и выход соединен с отрицательным входом компаратора (11), имеющего выход, соединенный со входом корректора (12), имеющего выход, соединенный с блоком (13) задания последовательности и со вторым блоком (14) оценивания, имеющим первый выход, соединенный с положительным входом компаратора, и второй выход, обеспечивающий оценку ускорения.
7. Датчик по любому одному из пп. 1-6, в котором блок (8) управления выполнен с возможностью подачи второго сигнала обнаружения и сигнала управления посредством общего импульса обнаружения и управления.
8. Способ управления акселерометрическим датчиком по любому одному из пп. 1-7, отличающийся тем, что он включает в себя этапы, на которых:
- обнаруживают переменные емкости конденсаторов путем подачи в течение каждого периода калибровки первого сигнала обнаружения на один из неподвижных электродов (5.1, 5.2), выбираемый в соответствии с логическим уровнем сигнала управления, и второго сигнала обнаружения на другой неподвижный электрод;
- управляют подвижным электродом (5.3) в зависимости от емкостей, измеряемых при подаче логического сигнала, для управления переключателем (9), для избирательного соединения неподвижных электродов со схемой (6) возбуждения, подводящей сигнал управления, с тем, чтобы подавать сигнал (u) управления к электроду, на который подают второй логический сигнал обнаружения.
9. Способ по п. 8, в котором второй сигнал обнаружения и сигнал управления подают посредством общего импульса обнаружения и управления.
| ДАТЧИК С ЭЛЕКТРОСТАТИЧЕСКИМ МАЯТНИКОВЫМ АКСЕЛЕРОМЕТРОМ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ДАТЧИКОМ | 2014 |
|
RU2647983C2 |
| US 2018335445 A1, 22.11.2018 | |||
| ГАЗОВЫЙ ЛАЗЕР ЩЕЛЕВОГО ТИПА | 2023 |
|
RU2814794C1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ЧАСТОТНЫМ ВЫХОДОМ | 1973 |
|
SU1839862A2 |

